Journal of Shanghai Jiao Tong University ›› 2022, Vol. 56 ›› Issue (10): 1388-1396.doi: 10.16183/j.cnki.jsjtu.2021.290
Special Issue: 《上海交通大学学报》2022年“机械与动力工程”专题
• Mechanical Engineering • Previous Articles Next Articles
WANG Yuxuan, LIU Zhaoyu, WANG Jiangbei, FEI Yanqiong( )
)
Received:2021-08-04
Online:2022-10-28
Published:2022-11-03
Contact:
FEI Yanqiong
E-mail:fyq@sjtu.edu.cn.
CLC Number:
WANG Yuxuan, LIU Zhaoyu, WANG Jiangbei, FEI Yanqiong. Dual Modular Soft Robot with Multi-Terrain Movement Ability[J]. Journal of Shanghai Jiao Tong University, 2022, 56(10): 1388-1396.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2021.290
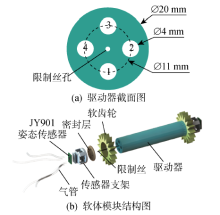
Fig.1
Design of soft module


Fig.2
Dual module soft robot
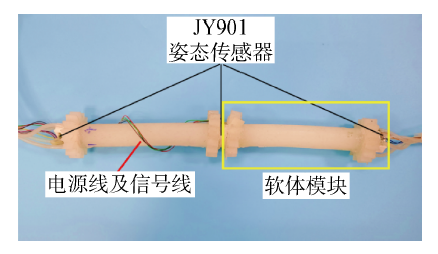
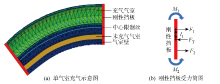
Fig.3
Schematic diagram of source of bending moment
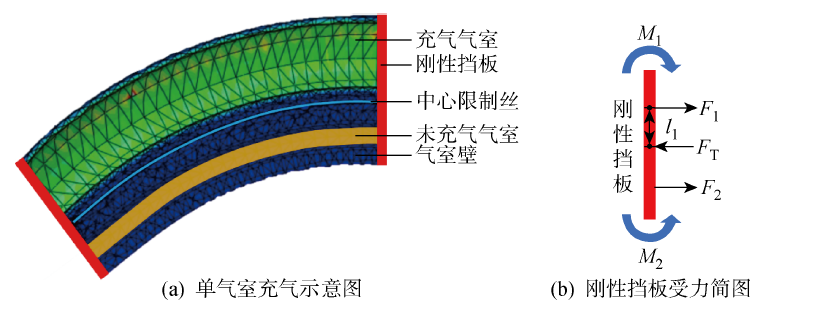

Fig.4
Diagram of bending analysis
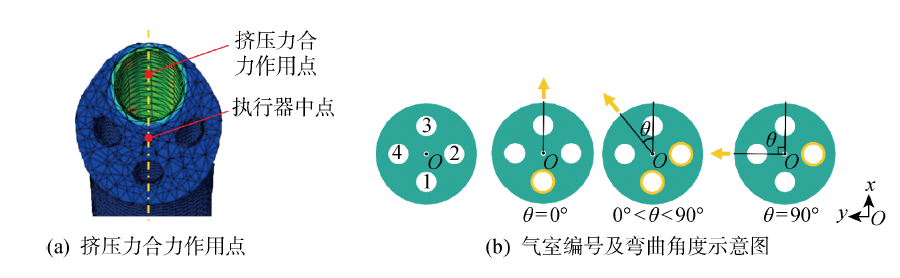

Fig.5
Pressure change pattern of four air chambers of actuator
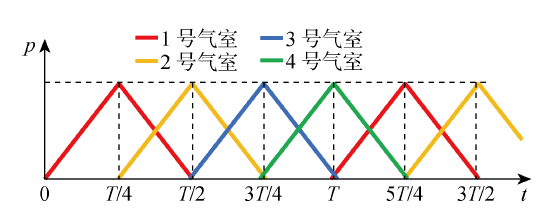
Fig.6
Schematic diagram of rotary movement of straight-through actuator
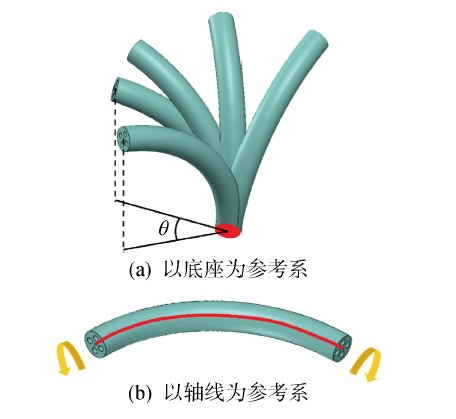

Fig.7
Schematic diagram of forces of straight through actuator during vertical pipe climbing movement
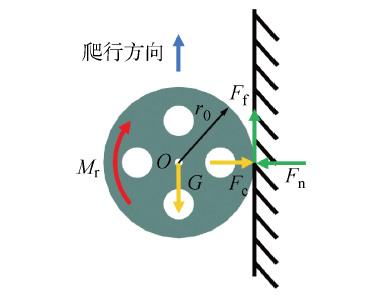
Fig.8
Schematic diagram of dual modular soft robot climbing
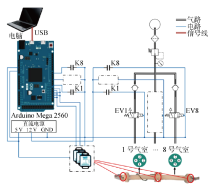
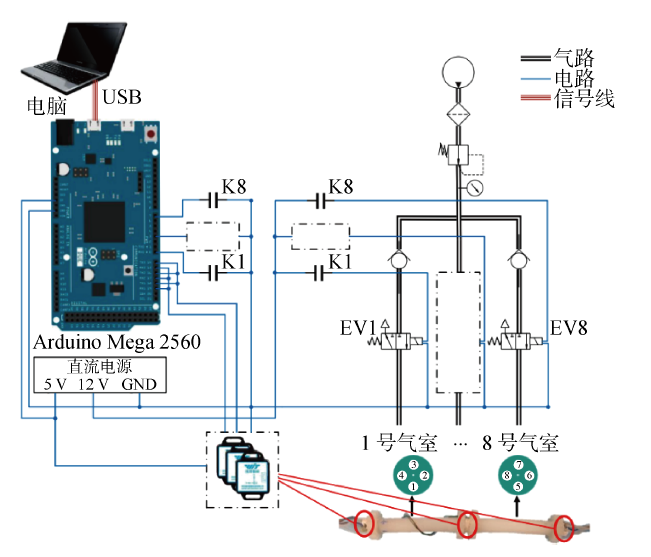
Fig.9
Control system of dual modular soft robot
Tab.1
Performance parameters of SMC S070C-5DC-32
| 参数 | 取值 |
|---|---|
| Ue/V | DC 24 |
| pmax/kPa | 500 |
| mSMC/g | 5 |
| PSMC/ W | 0.5 |
| t1/ms | <3 |
| t2/ms | <3 |

Fig.10
Bending angle versus duty ratio
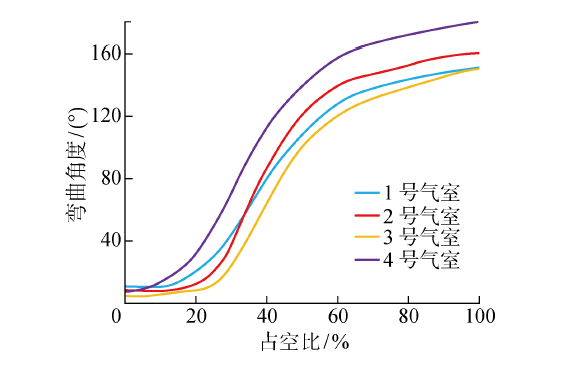
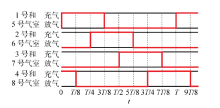
Fig.11
Air chamber inflation and deflation pattern of pipe-climbing gait
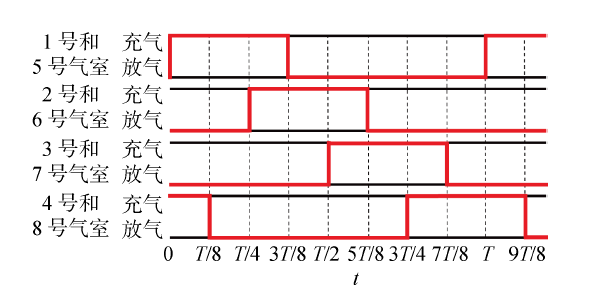
Fig.12
Schematic diagram of bending angle and direction of dual modular soft robot under gait control strategy
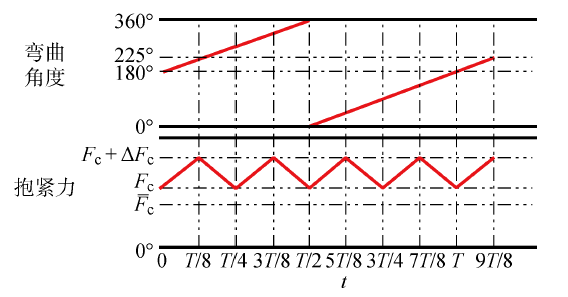

Fig.13
Turning movement process of dual modular soft robot
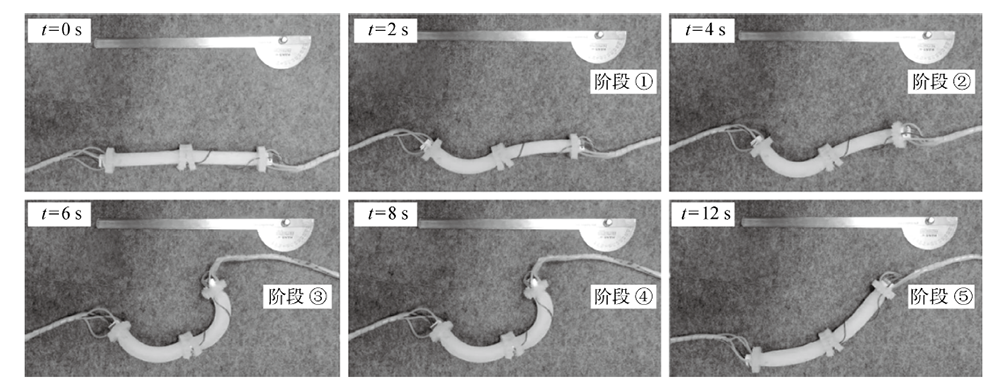
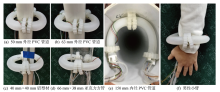
Fig.14
Experiment of vertical climbing
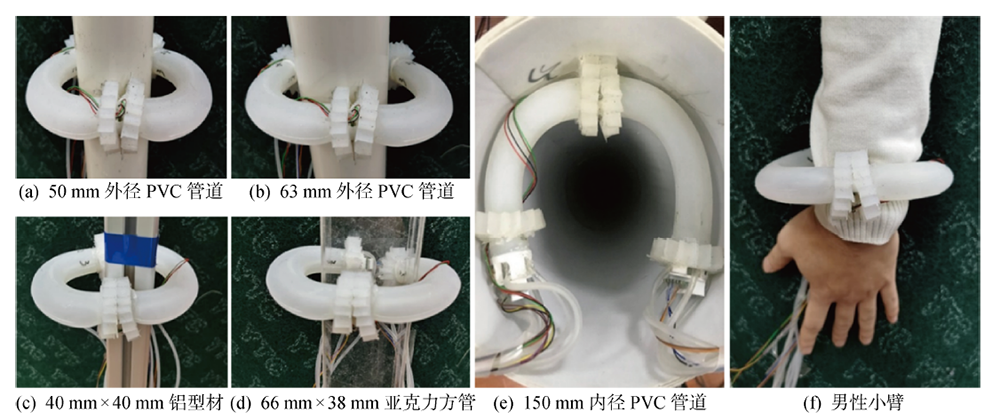
Tab.2
Vertical movement speed in different climbing environments
| 不同攀爬环境 | 移动速度/(mm·s-1) | 不同攀爬环境 | 移动速度/(mm·s-1) |
|---|---|---|---|
| 50 mm外径PVC管道 | 6.5 | 66 mm×38 mm亚克力方管 | 8.6 |
| 63 mm外径PVC管道 | 8.1 | 150 mm内径PVC管道 | 6.8 |
| 40 mm×40 mm铝型材 | 5.4 | 男性小臂 | 11.7 |

Fig.15
Process of slope-climbing
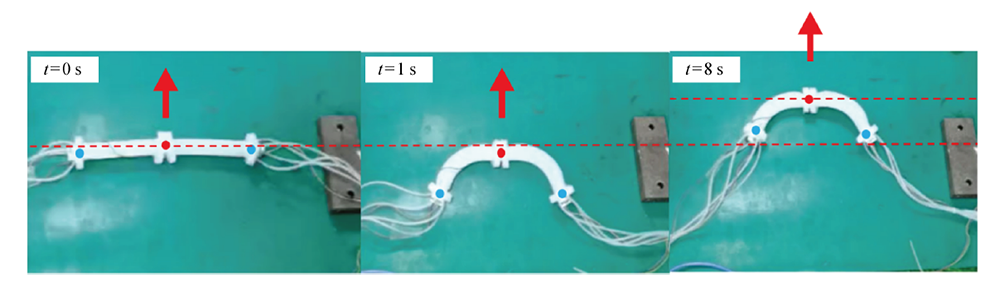

Fig.16
Movement test on gravel road

Fig.17
Creep process on gravel pavement
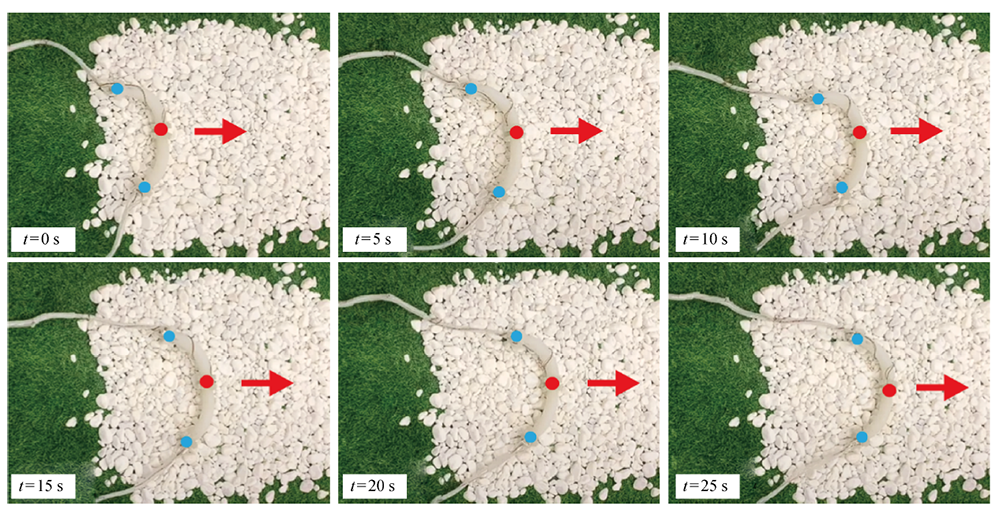
Tab.3
Movement speed in different terrains
| 不同地形 | 移动速度/(mm·s-1) |
|---|---|
| 人造草皮 | 6.5 |
| 木地板 | 8.1 |
| 6~9 mm碎石路面 | 8.6 |
| 10~20 mm碎石路面 | 5.4 |
| [1] |
XU F Y, JIANG F Y, JIANG Q S, et al. Soft actuator model for a soft robot with variable stiffness by coupling pneumatic structure and jamming mechanism[J]. IEEE Access, 2020, 8: 26356-26371.
doi: 10.1109/ACCESS.2020.2968928 URL |
| [2] | KALı N M A İ, AYGÜ L C, TÜRKMEN A,et al. Design, fabrication, and locomotion analysis of an untethered miniature soft quadruped, squad[J]. Robotics and Automation Letters, 2020, 5(3): 3854-3860 |
| [3] |
BAO J L, CHEN W H, XU J. Kinematics modeling of a twisted and coiled polymer-based elastomer soft robot[J]. IEEE Access, 2019, 7: 136792-136800.
doi: 10.1109/ACCESS.2019.2942486 URL |
| [4] | XU J J, LIU B, LI K J, et al. Design and structure analysis of multi-legged bionic soft robot[C]//2020 International Conference on Advanced Mechatronic Systems. Hanoi, Vietnam: IEEE, 2020: 180-185. |
| [5] | LU X J, WANG K, HU T T. Development of an annelid-like peristaltic crawling soft robot using dielectric elastomer actuators[J]. Bioinspiration & Biomimetics, 2020, 15(4): 046012. |
| [6] |
LI C, LAU G C, YUAN H, et al. Fast and programmable locomotion of hydrogel-metal hybrids under light and magnetic fields[J]. Science Robotics, 2020, 5(49): eabb9822.
doi: 10.1126/scirobotics.abb9822 URL |
| [7] |
ZHANG Z Y, WANG X Q, WANG S T, et al. Design and modeling of a parallel-pipe-crawling pneumatic soft robot[J]. IEEE Access, 2019, 7: 134301-134317.
doi: 10.1109/ACCESS.2019.2941502 |
| [8] |
YEH C Y, CHEN C Y, JUANG J Y. Soft hopping and crawling robot for in-pipe traveling[J]. Extreme Mechanics Letters, 2020, 39: 100854.
doi: 10.1016/j.eml.2020.100854 URL |
| [9] | 王羽麟. 可重构软体模块化机器人研制及其运动控制研究[D]. 哈尔滨: 哈尔滨工业大学, 2018. |
| WANG Yulin. Development and motion control strategy research of soft reconfigurable modular robots[D]. Harbin:Harbin Institute of Technology, 2018. | |
| [10] | YAMADA S, HIROSE S, ENDO G, et al. R-Crank: Amphibious all terrain mobile robot[C]//2016 IEEE/RSJ International Conference on Intelligent Robots and Systems. Daejeon, Korea (South): IEEE, 2016: 1067-1072. |
| [11] | DROTMAN D, JADHAV S, KARIMI M, et al. 3D printed soft actuators for a legged robot capable of navigating unstructured terrain[C]//2017 IEEE International Conference on Robotics and Automation. Jeju, Korea (South): IEEE, 2017: 5532-5538. |
| [12] | HAN S C, AN J, MOON H. A remotely controlled out-pipe climbing robot[C]//2013 10th International Conference on Ubiquitous Robots and Ambient Intelligence. Jeju, Korea (South): IEEE, 2013: 126. |
| [1] | YU Wenxue, MIAO Tian, FANG Zhemei. Designing UAF-Based Meta-Model for Service-Driven Modular Combat System Architecture [J]. Air & Space Defense, 2026, 9(1): 145-158. |
| [2] | Zhang Dong, Liu Sheng, Shi Mengyao, Cai Yu, Wang Dazhong. Misaligned Parallel-Chamber Soft Pneumatic Network Actuator for Multi-Mode Gripping [J]. J Shanghai Jiaotong Univ Sci, 2026, 31(1): 59-70. |
| [3] | LI Bing. Jacket Horizontal Non-Skidway Construction and SPMT Loadout Technology [J]. Ocean Engineering Equipment and Technology, 2025, 12(4): 32-37. |
| [4] | ZHANG Rongfu, WANG Jinqiang, LIU Minxia. Optimal Design Method of Complex System Based on Resource Optimization [J]. Air & Space Defense, 2025, 8(3): 86-94. |
| [5] | JIANG Yafeng, LI Yibo, WU Qiuwei, LIU Shenquan, WU Xiaodan, ZHOU Qian. Circulating Current Suppression Strategy of Modular Multilevel Matrix Converter Based on Quasi-Proportional Resonant Control [J]. Journal of Shanghai Jiao Tong University, 2025, 59(2): 242-251. |
| [6] | BAI Feng, CHEN Wuhui, QIN Wei. Sub-Synchronous Oscillations Caused by Interaction of a PMSG-Based Wind Farm with a Four-Terminal MMC-HVDC Grid [J]. Journal of Shanghai Jiao Tong University, 2025, 59(11): 1707-1719. |
| [7] | MA Deqiang, LUO Chao, WU Binbin, WEN Cai, JIANG Lei. Research on Analysis and Application of Non-Slide Construction and Loading Technology for Offshore Platform Jacket [J]. Ocean Engineering Equipment and Technology, 2024, 11(4): 85-88. |
| [8] | LI Ru1 (李茹), CHEN Fang2 (陈方), YU Wenwei3 (俞文伟), IGARASH Tatsuo3,4, SHU Xiongpeng1 (舒雄鹏), XIE Le1,5,6∗ (谢叻). A Novel Cable-Driven Soft Robot for Surgery [J]. J Shanghai Jiaotong Univ Sci, 2024, 29(1): 60-72. |
| [9] | MA Chi, ZHANG Guoqun, SUN Junge, LYU Guangzhe, ZHANG Tao. Deep Reinforcement Learning-Based Reconfiguration Method for Integrated Electronic Systems [J]. Air & Space Defense, 2024, 7(1): 63-70. |
| [10] | Siavash Iravani, Rajender S. Varma. MXenes for Bioinspired Soft Actuators: Advancements in Angle-Independent Structural Colors and Beyond [J]. Nano-Micro Letters, 2024, 16(1): 142-. |
| [11] | LI Linlin (李林霖), GAO Feiyang (高飞扬), ZHENG Xiongfei(郑雄飞), ZHANG Liming(张黎明), LI Shijie (李世杰), WANG Heran(王赫然). Enhancement of Pinching Grasping Robustness Using a Multi-Structure Soft Gripper [J]. J Shanghai Jiaotong Univ Sci, 2023, 28(3): 307-311. |
| [12] | CHEN Weichi(陈韦池), LIU Haocheng(刘浩城), LI Zijian(李子建), GUO Jing, (郭靖), ZHAI Zhenkun(翟振坤), MENG Wei(孟伟). Novel Concentric Tube Robot Based on Double-Threaded Helical Gear Tube [J]. J Shanghai Jiaotong Univ Sci, 2023, 28(3): 296-306. |
| [13] | ZHAO Yafei (赵亚飞), HUANG Chaoyi (黄超逸), ZOU Yuging(邹玉莹), ZOUKehan(邹可涵), zoU Xiaogang(邹笑阳), XUE .Jiaqi(薛嘉琦), LI Xiaoting(李晓婷), KOH Keng Huat, WANG Xiaojun(王小军), LAI Wai Chiu King(赖伟超), HU Yong(胡勇), XI Ning(席宁), WANG Zheng(王峥). Integrated Hydraulic-Driven Wearable Robot for Knee Assistance [J]. J Shanghai Jiaotong Univ Sci, 2023, 28(3): 289-295. |
| [14] | ZHANG Wei, HAN Junfei, ZHONG Ming, WANG Yuqiang. An Improved NLC and Capacitor Voltage Control Method for Medium-/Low-Voltage MMCs [J]. Journal of Shanghai Jiao Tong University, 2023, 57(11): 1465-1476. |
| [15] | MA Zhoujun, WANG Yong, WANG Jie, CHEN Shaoyu. A Dual Cooperative Optimization for Optimal Redundancy Quantity of MMC Submodules of Flexible Controller [J]. Journal of Shanghai Jiao Tong University, 2022, 56(3): 325-332. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||