Journal of Shanghai Jiao Tong University ›› 2021, Vol. 55 ›› Issue (8): 1035-1048.doi: 10.16183/j.cnki.jsjtu.2020.387
Special Issue: 《上海交通大学学报》2021年12期专题汇总专辑; 《上海交通大学学报》2021年“自动化技术、计算机技术”专题
• Expert Forum • Previous Articles
HU Yikai, WANG Chunxiang( ), YANG Ming
), YANG Ming
Received:2020-11-23
Online:2021-08-28
Published:2021-08-31
Contact:
WANG Chunxiang
E-mail:wangcx@sjtu.edu.cn
CLC Number:
HU Yikai, WANG Chunxiang, YANG Ming. Decision-Making Method of Intelligent Vehicles: A Survey[J]. Journal of Shanghai Jiao Tong University, 2021, 55(8): 1035-1048.
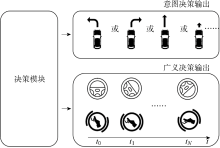
Fig.1
Schematic diagram of output of decision module

Tab.1
Classification of decision-making methods based on input and output types
| 类别 | 优势 | 劣势 | 文献编号 |
|---|---|---|---|
| 路侧感知模块输入 | 全局可观感知信息 | 对基础设施有高要求 | [ |
| 感知计算结果输入 | 数据易处理 | 丢失丰富的感知信息 | [ |
| 车载原始信息输入 | 拥有丰富的感知信息 | 感知范围受限易遮挡 | [ |
| 意图决策输出 | 具有明确的决策意图 | 难以枚举现实场景 | [ |
| 广义决策输出 | 遍历更广的解空间 | 决策意图不明晰 | [ |
Tab.2
Classification of decision-making methods based on interaction with the environment
| 类别 | 优势 | 劣势 | 文献编号 |
|---|---|---|---|
| 博弈形式 | 与环境存在主动交互 | 假设全为理性决策者 | [ |
| 礼让形式 | 车辆安全性较高 | 车辆智能度偏低 | [ |
Tab.3
Classification of decision-making methods based on algorithm types
| 类别 | 优势 | 劣势 | 文献编号 |
|---|---|---|---|
| 基于状态机 | 逻辑清晰 | 复杂场景表现不佳 | [ |
| 基于深度监督学习 | 灵活性强 | 对训练数据要求较高 | [ |
| 基于强化学习 | 运算效率高 | 局限于人工设定奖惩 | [ |
| 基于逆强化学习 | 算法生成奖励函数 | 易造成过拟合 | [ |
Tab.4
Data format of NGSIM dataset
| 编号 | 名称 | 描述 |
|---|---|---|
| 1 | vehicle ID | 车辆编号 |
| 2 | frame ID | 数据帧号 |
| 3 | total frames | 数据总帧 |
| 4 | global time | 标准时间 |
| 5 | local x | 坐标系x值 |
| 6 | local y | 坐标系y值 |
| 7 | global x | 标准地理坐标系x值 |
| 8 | global y | 标准地理坐标系y值 |
| 9 | vehicle length | 车辆长度 |
| 10 | vehicle width | 车辆宽度 |
| 11 | vehicle class | 车辆类型 |
| 12 | vehicle velocity | 车辆速度 |
| 13 | vehicle acceleration | 车辆加速度 |
| 14 | lane identification | 车道编号 |
| 15 | preceding vehicle | 跟驰前车编号 |
| 16 | following vehicle | 跟驰后车编号 |
| 17 | spacing | 车头间距 |
| 18 | headway | 车头时距 |
Tab.5
Data format of High-D dataset
| 编号 | 名称 | 描述 |
|---|---|---|
| 1 | id | 记录的ID |
| 2 | frameRate | 用来录制视频的帧速率 |
| 3 | locationId | 记录位置的ID |
| 4 | speedLimit | 行驶车道的速度限制 |
| 5 | month | 录制的月份 |
| 6 | weekDay | 录制的工作日完成 |
| 7 | startTime | 录制的开始时间 |
| 8 | duration | 记录的持续时间 |
| 9 | totalDrivenDistance | 所有履带车辆的总行驶距离 |
| 10 | totalDrivenTime | 所有履带车辆的总行驶时间 |
| 11 | numVehicles | 跟踪的车辆数量,包括汽车和卡车 |
| 12 | numCars | 跟踪的汽车数量 |
| 13 | numTrucks | 跟踪的卡车数量 |
| 14 | upperLaneMarkings | 上车道标记的y位置 |
| 15 | lowerLaneMarkings | 下车道标记的y位置 |
Tab.6
Data format of INTERACTION dataset
| 编号 | 名称 | 描述 |
|---|---|---|
| 1 | track_id | 代表车辆的ID |
| 2 | frame_id | 车辆出现在视频中的帧 |
| 3 | timestamp_ms | 时间戳 |
| 4 | agent_type | 跟踪类型:“行人/自行车” |
| 5 | x | 每一帧的坐标x |
| 6 | y | 每一帧的坐标y |
| 7 | vx | x方向速度 |
| 8 | vy | y方向速度 |
Tab.7
Data format of Level 5 dataset
| 编号 | 名称 | 描述 | 编号 | 名称 | 描述 |
|---|---|---|---|---|---|
| 1 | timestamp | 时间戳 | 6 | extent | 车辆尺寸 |
| 2 | agent_index_interval | 车辆ID | 7 | yaw | 车辆朝向 |
| 3 | ego_translation | 自车位置转换向量 | 8 | velocity | 车辆速度 |
| 4 | ego_rotation | 自车朝向转换向量 | 9 | track_id | 轨迹ID |
| 5 | centroid | 车辆坐标 | 10 | label_probabilities | 车辆类型置信度 |
Tab.8
Summary of datasets
| 数据集 | 场景描述 | 地点 | 时长/min | 采样率/Hz | 数据格式 | 文献编号 |
|---|---|---|---|---|---|---|
| NGSIM | 高速、城市道路 | 美国 | 90 | 10 | csv | [ |
| High-D | 高速公路 | 德国 | 690 | 25 | csv | [ |
| INTERACTION | 路口场景 | 世界 | 990. 98 | 10 | csv | [ |
| Level 5 | 城市道路 | 美国 | 1002 | 10 | zarr | [ |
| [1] | 胡兵, 杨明, 郭林栋, 等. 基于地面快速鲁棒特征的智能车全局定位方法[J]. 上海交通大学学报, 2019, 53(2):203-208. |
| HU Bing, YANG Ming, GUO Lindong, et al. Global localization for intelligent vehicles using ground SURF[J]. Journal of Shanghai Jiao Tong University, 2019, 53(2):203-208. | |
| [2] | 杜明博, 梅涛, 陈佳佳, 等. 复杂环境下基于RRT的智能车辆运动规划算法[J]. 机器人, 2015, 37(4):443-450. |
| DU Mingbo, MEI Tao, CHEN Jiajia, et al. RRT-based motion planning algorithm for intelligent vehicle in complex environments[J]. Robot, 2015, 37(4):443-450. | |
| [3] | 陈佳佳. 城市环境下无人驾驶车辆决策系统研究[D]. 合肥: 中国科学技术大学, 2014. |
| CHEN Jiajia. Research on decision making system of autonomous vehicle in urban environments[D]. Hefei: University of Science and Technology of China, 2014. | |
| [4] |
SCHWARTING W, ALONSO-MORA J, RUS D. Planning and decision-making for autonomous vehicles[J]. Annual Review of Control, Robotics, and Autonomous Systems, 2018, 1(1):187-210.
doi: 10.1146/control.2018.1.issue-1 URL |
| [5] | 熊璐, 康宇宸, 张培志, 等. 无人驾驶车辆行为决策系统研究[J]. 汽车技术, 2018(8):1-9. |
| XIONG Lu, KANG Yuchen, ZHANG Peizhi, et al. Research on behavior decision-making system for unmanned vehicle[J]. Automobile Technology, 2018(8):1-9. | |
| [6] | GONZÁLEZ D S, GARZÓN M, DIBANGOYE J S, et al. Human-like decision-making for automated driving in highways[C]//2019 IEEE Intelligent Transportation Systems Conference (ITSC). Auckland, New Zealand: IEEE, 2019: 2087-2094. |
| [7] |
NOH S, AN K. Decision-making framework for automated driving in highway environments[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(1):58-71.
doi: 10.1109/TITS.2017.2691346 URL |
| [8] | XIONG G M, KANG Z Y, LI H, et al. Decision-making of lane change behavior based on RCS for automated vehicles in the real environment[C]//2018 IEEE Intelligent Vehicles Symposium (IV). Changshu: IEEE, 2018: 1400-1405. |
| [9] |
NISHI T, DOSHI P, PROKHOROV D. Merging in congested freeway traffic using multipolicy decision making and passive actor-critic learning[J]. IEEE Transactions on Intelligent Vehicles, 2019, 4(2):287-297.
doi: 10.1109/TIV URL |
| [10] |
KANG K, RAKHA H A. A repeated game freeway lane changing model[J]. Sensors, 2020, 20(6):1554.
doi: 10.3390/s20061554 URL |
| [11] | KANG K, RAKHA H A. Game theoretical approach to model decision making for merging maneuvers at freeway on-ramps[J]. Transportation Research Record Journal of the Transportation Research Board, 2017, 2623(1):19-28. |
| [12] |
GUO J Q, CHENG S L, LIU Y. Merging and diverging impact on mixed traffic of regular and autonomous vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 22(3):1639-1649.
doi: 10.1109/TITS.6979 URL |
| [13] | HOEL C J, WOLFF K, LAINE L. Automated speed and lane change decision making using deep reinforcement learning[C]//2018 21st International Conference on Intelligent Transportation Systems (ITSC). Maui, HI, USA: IEEE, 2018: 2148-2155. |
| [14] | ALIZADEH A, MOGHADAM M, BICER Y, et al. Automated lane change decision making using deep reinforcement learning in dynamic and uncertain highway environment[C]//2019 IEEE Intelligent Transportation Systems Conference (ITSC). Auckland, New Zealand: IEEE, 2019: 1399-1404. |
| [15] | LI T T, WU J P, CHAN C Y. Evolutionary learning in decision making for tactical lane changing[C]//2019 IEEE Intelligent Transportation Systems Conference (ITSC). Auckland, New Zealand: IEEE, 2019: 19211185. |
| [16] | CODEVILLA F, MÜLLER M, LÓPEZ A, et al. End-to-end driving via conditional imitation learning[C]//2018 IEEE International Conference on Robotics and Automation (ICRA). Brisbane, QLD, Australia: IEEE, 2018: 4693-4700. |
| [17] | SANTANA E, HOTZ G. Learning a driving simulator[EB/OL]. (2016-08-01) [2020-06-14]. https://www.researchgate.net/publication/305809416_Learning_a_Driving_Simulator . |
| [18] | YUAN W, YANG M, WANG C X, et al. Longitudinal and lateral coupling model based end-to-end learning for lane keeping of self-driving cars[C]//International Conference on Cognitive Systems and Signal Processing. Beijing: ICCSIP, 2019: 425-436. |
| [19] |
YUAN W, YANG M, LI H, et al. End-to-end learning for high-precision lane keeping via multi-state model[J]. CAAI Transactions on Intelligence Technology, 2018, 3(4):185-190.
doi: 10.1049/cit2.v3.4 URL |
| [20] | YU H, YANG S, GU W H, et al. Baidu driving dataset and end-to-end reactive control model[C]//2017 IEEE Intelligent Vehicles Symposium (IV). Los Angeles, CA, USA: IEEE, 2017: 341-346. |
| [21] | BOJARSKI M, YERES P, CHOROMANSKA A, et al. Explaining how a deep neural network trained with end-to-end learning steers a car[EB/OL]. (2017-04-14) [2020-06-14]. https://www.researchgate.net/publication/316505624_Explaining_How_a_Deep_Neural_Network_Trained_with_End-to-End_Learning_Steers_a_Car . |
| [22] | IBERRAKEN D, ADOUANE L, DENIS D. Safe autonomous overtaking maneuver based on inter-vehicular distance prediction and multi-level Bayesian decision-making[C]//IEEE Conference on Intelligent Transportation Systems. Maui, HI, USA: IEEE, 2018: 18308831. |
| [23] | TRAM T, BATKOVIC I, ALI M, et al. Learning when to drive in intersections by combining reinforcement learning and model predictive control[C]//2019 IEEE Intelligent Transportation Systems Conference (ITSC). Auckland, New Zealand: IEEE, 2019: 19194092. |
| [24] | ORZECHOWSKI P F, BURGER C, LAUER M. Decision-making for automated vehicles using a hierarchical behavior-based arbitration scheme[C]//2020 IEEE Intelligent Vehicles Symposium (IV). Las Vegas, NV, USA: IEEE, 2020: 20286743. |
| [25] | WANG X, WU J Q, GU Y L, et al. Human-like maneuver decision using LSTM-CRF model for on-road self-driving[C]//2018 21st International Conference on Intelligent Transportation Systems (ITSC). Maui, HI, USA: IEEE, 2018: 210-216. |
| [26] | 成英, 高利, 陈雪梅, 等. 有人与无人驾驶车辆交叉口驾驶博弈模型[J]. 北京理工大学学报, 2019, 39(9):938-943. |
| CHENG Ying, GAO Li, CHEN Xuemei, et al. A driving game model for manned and unmanned vehicles at intersection[J]. Transactions of Beijing Institute of Technology, 2019, 39(9):938-943. | |
| [27] | CHEN Z L, HUANG X M. End-to-end learning for lane keeping of self-driving cars[C]//2017 IEEE Intelligent Vehicles Symposium (IV). Los Angeles, CA, USA: IEEE, 2017: 1856-1860. |
| [28] |
LI N, OYLER D W, ZHANG M X, et al. Game theoretic modeling of driver and vehicle interactions for verification and validation of autonomous vehicle control systems[J]. IEEE Transactions on Control Systems Technology, 2018, 26(5):1782-1797.
doi: 10.1109/TCST.87 URL |
| [29] | CUNNINGHAM A G, GALCERAN E, EUSTICE R M, et al. MPDM: Multipolicy decision-making in dynamic, uncertain environments for autonomous driving[C]//2015 IEEE International Conference on Robotics and Automation (ICRA). Seattle, WA, USA: IEEE, 2015: 1670-1677. |
| [30] | SCHWARTING W, PASCHEKA P. Recursive conflict resolution for cooperative motion planning in dynamic highway traffic[C]//17th International IEEE Conference on Intelligent Transportation Systems (ITSC). Qingdao: IEEE, 2014: 1039-1044. |
| [31] | LENZ D, KESSLER T, KNOLL A. Tactical cooperative planning for autonomous highway driving using Monte-Carlo Tree Search[C]//2016 IEEE Intelligent Vehicles Symposium (IV). Gothenburg, Sweden: IEEE, 2016: 447-453. |
| [32] | CUNNINGHAM A G, GALCERAN E, MEHTA D, et al. MPDM: Multi-policy decision-making from autonomous driving to social robot navigation[M]//WASCHL H, KOLMANOVSKY I, WILLEMS F. Control Strategies for Advanced Driver Assistance Systems and Autonomous Driving Functions. Berlin, Germany: Springer, 2019: 201-223. |
| [33] | CHEN J Y, TANG C, XIN L, et al. Continuous decision making for on-road autonomous driving under uncertain and interactive environments[C]//2018 IEEE Intelligent Vehicles Symposium (IV). Changshu: IEEE, 2018: 1651-1658. |
| [34] | WEI J Q, DOLAN J M, LITKOUHI B. Autonomous vehicle social behavior for highway entrance ramp management[C]//2013 IEEE Intelligent Vehicles Symposium (IV). Gold Coast, QLD, Australia: IEEE, 2013: 201-207. |
| [35] | HOERMANN S, STUMPER D, DIETMAYER K. Probabilistic long-term prediction for autonomous vehicles[C]//2017 IEEE Intelligent Vehicles Symposium (IV). Piscataway, NJ, USA: IEEE, 2017: 237-243. |
| [36] |
DING W C, ZHANG L, CHEN J, et al. Safe trajectory generation for complex urban environments using spatio-temporal semantic corridor[J]. IEEE Robotics and Automation Letters, 2019, 4(3):2997-3004.
doi: 10.1109/LSP.2016. URL |
| [37] | 武历颖. 无人驾驶汽车环境信息提取及运动决策方法研究[D]. 西安: 长安大学, 2016. |
| WU Liying. Research on environmental information extraction and movement decision-making method of unmanned vehicle[D]. Xi’an: Changan University, 2016. | |
| [38] | LEURENT E, MERCAT J. Social attention for autonomous decision-making in dense traffic[EB/OL]. (2019-11-27) [2020-06-14]. https://arxiv.org/abs/1911.12250 . |
| [39] | MEHTA A, SUBRAMANIAN A. Learning end-to-end autonomous driving using guided auxiliary supervision[EB/OL]. (2018-08-30) [2020-06-14]. https://www.researchgate.net/publication/327335968_Learning_End-to-end_Autonomous_Driving_using_Guided_Auxiliary_Supervision . |
| [40] | XU J X, LUO Q, XU K C, et al. An automated learning-based procedure for large-scale vehicle dynamics modeling on Baidu Apollo platform[C]//2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway, NJ, USA: IEEE, 2019: 5049-5056. |
| [41] | SUTTON R S, BARTO A G. Reinforcement learning: An introduction[J]. IEEE Transactions on Neural Networks, 1998, 9(5):1054. |
| [42] | PIETER A, ANDREW Y. Apprenticeship learning via inverse reinforcement learning[EB/OL]. (2004-09-01) [2020-06-14]. https://www.researchgate.net/publication/2947330_Apprenticeship_Learning_via_Inverse_Reinforcement_Learning . |
| [43] | BOJARSKI M, DEL TESTA D, DWORAKOWSKI D, et al. End to end learning for self-driving cars[EB/OL]. (2016-04-01)[2020-06-15]. https://www.researchgate.net/publication/301648615_End_to_End_Learning_for_Self-Driving_Cars . |
| [44] | XU H Z, GAO Y, YU F, et al. End-to-end learning of driving models from large-scale video datasets[C]//2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway, NJ, USA: IEEE, 2017: 3530-3538. |
| [45] | HECKER S, DAI D X, GOOL L. End-to-end learning of driving models with surround-view cameras and route planners[C]//European Conference on Computer Vision. Glasgow, UK: Springer, 2018: 449-468. |
| [46] | GAO Z H, SUN T J, XIAO H W. Decision-making method for vehicle longitudinal automatic driving based on reinforcement Q-learning[J]. International Journal of Advanced Robotic Systems, 2019, 16(3):172988141985318. |
| [47] |
YE Y J, ZHANG X H, SUN J. Automated vehicle’s behavior decision making using deep reinforcement learning and high-fidelity simulation environment[J]. Transportation Research Part C: Emerging Technologies, 2019, 107:155-170.
doi: 10.1016/j.trc.2019.08.011 URL |
| [48] | 郑睿. 基于增强学习的无人车辆智能决策方法研究[D]. 长沙: 国防科学技术大学, 2013. |
| ZHENG Rui. Reinforcement learning-based intelligent decision-making methods for unmanned vehicles[D]. Changsha: National University of Defense Technology, 2013. | |
| [49] | YUAN W, YANG M, HE Y S, et al. Multi-reward architecture based reinforcement learning for highway driving policies[C]//2019 IEEE Intelligent Transportation Systems Conference (ITSC). Auckland, New Zealand: IEEE, 2019: 19194107. |
| [50] | QIAO Z Q, MUELLING K, DOLAN J M, et al. Automatically generated curriculum based reinforcement learning for autonomous vehicles in urban environment[C]//2018 IEEE Intelligent Vehicles Symposium (IV). Piscataway, NJ, USA: IEEE, 2018: 1233-1238. |
| [51] | BOUTON M, NAKHAEI A, FUJIMURA K, et al. Cooperation-aware reinforcement learning for merging in dense traffic[C]//2019 IEEE Intelligent Transportation Systems Conference (ITSC). Changshu: IEEE, 2019: 3441-3447. |
| [52] | KAUSHIK M, PRASAD V, KRISHNA K M, et al. Overtaking maneuvers in simulated highway driving using deep reinforcement learning[C]//2018 IEEE Intelligent Vehicles Symposium (IV). Changshu: IEEE, 2018: 1885-1890. |
| [53] | FERDOWSI A, CHALLITA U, SAAD W, et al. Robust deep reinforcement learning for security and safety in autonomous vehicle systems[C]//2018 21st International Conference on Intelligent Transportation Systems (ITSC). Piscataway, NJ, USA: IEEE, 2018: 307-312. |
| [54] | MA X B, CAMPBELL D K, KOCHENDERFER M J. Improved robustness and safety for autonomous vehicle control with adversarial reinforcement learning[C]//2018 IEEE Intelligent Vehicles Symposium (IV). Changshu: IEEE, 2018: 18168097. |
| [55] | SHARIFZADEH S, CHIOTELLIS I, TRIEBEL R, et al. Learning to drive using inverse reinforcement learning and deep Q-networks[EB/OL]. (2016-12-12) [2020-06-14]. https://arxiv.org/abs/1612.03653 . |
| [56] | CHEN X L, MONFORT M, ZIEVART B D, et al. Adversarial inverse optimal control for general imitation learning losses and embodiment transfer[EB/OL]. (2016-06-01)[2020-06-14]. https://scholar.google.com.hk/scholar?hl=zh-CN&as_sdt=0%2C5&q=Adversarial+Inverse+Optimal+Control+for+General+Imitation+Learning+Losses+and+Embodiment+Transfer&btnG= . |
| [57] | MAJUMDAR A, SINGH S, MANDLEKAR A, et al. Risk-sensitive inverse reinforcement learning via coherent risk models[EB/OL]. [2020-06-14]. http://www.roboticsproceedings.org/rss13/p69.pdf . |
| [58] | WULFMEIER M, ONDRUSKA P, POSNER I. Maximum entropy deep inverse reinforcement learning[EB/OL]. (2015-07-17) [2020-06-14]. https://arxiv.org/abs/1507.04888 . |
| [59] | AHN H, BERNTORP K, DI CAIRANO S. Reachability-based decision making for city driving[C]//2018 Annual American Control Conference (ACC). Milwaukee, WI, USA: IEEE, 2018: 3203-3208. |
| [60] | BOUTON M, NAKHAEI A, FUJIMURA K, et al. Safe reinforcement learning with scene decomposition for navigating complex urban environments[C]//2019 IEEE Intelligent Vehicles Symposium (IV). Paris, France: IEEE, 2019: 1469-1476. |
| [61] | 陈雪梅, 田赓, 苗一松, 等. 城市环境下无人驾驶车辆驾驶规则获取及决策算法[J]. 北京理工大学学报, 2017, 37(5):491-496. |
| CHEN Xuemei, TIAN Geng, MIAO Yisong, et al. Driving rule acquisition and decision algorithm to unmanned vehicle in urban traffic[J]. Transactions of Beijing Institute of Technology, 2017, 37(5):491-496. | |
| [62] |
NISHI T, DOSHI P, PROKHOROV D. Merging in congested freeway traffic using multipolicy decision making and passive actor-critic learning[J]. IEEE Transactions on Intelligent Vehicles, 2019, 4(2):287-297.
doi: 10.1109/TIV URL |
| [63] | ALEXIADIS V, COLYAR J, HALKIAS J, et al. The next generation simulation program[J]. Institute of Transportation Engineers. ITE Journal, 2004, 74(8):22. |
| [64] | LI G, FANG S, MA J X, et al. Modeling merging acceleration and deceleration behavior based on gradient-boosting decision tree[J]. Journal of Transportation Engineering, Part A: Systems, 2020, 146(7):1-9. |
| [65] |
LI G, PAN Y Y, YANG Z, et al. Modeling vehicle merging position selection behaviors based on a finite mixture of linear regression models[J]. IEEE Access, 2019, 7:158445-158458.
doi: 10.1109/Access.6287639 URL |
| [66] | BIN AL ISLAM S M A, ABDUL AZIZ H M, HAJBABAIE A. Stochastic gradient-based optimal signal control with energy consumption bounds[EB/OL]. (2020-03-18) [2020-06-14]. https://scholar.google.com.hk/scholar?hl=zh-CN&as_sdt=0%2C5&q=Stochastic+Gradient-Based+Optimal+Signal+Control+With+Energy+Consumption+Bounds&btnG= . |
| [67] |
LI G, CHENG J. Exploring the effects of traffic density on merging behavior[J]. IEEE Access, 2019, 7:51608-51619.
doi: 10.1109/Access.6287639 URL |
| [68] | KRAJEWSKI R, BOCK J, KLOEKER L, et al. The highD dataset: A drone dataset of naturalistic vehicle trajectories on German highways for validation of highly automated driving systems[C]//2018 21st International Conference on Intelligent Transportation Systems (ITSC). Maui, HI, USA: IEEE, 2018: 18309040. |
| [69] | ZHAN W, SUN L, WANG D, et al. Interaction dataset: An international, adversarial and cooperative motion dataset in interactive driving scenarios with semantic maps[EB/OL]. (2019-09-30) [2020-06-14]. https://arxiv.org/abs/1910.03088 . |
| [70] | HOUSTON J, ZUIDHOF G, BERGAMINI L, et al. One thousand and one hours: Self-driving motion Prediction dataset[EB/OL]. (2020-06-25) [2020-08-14]. https://arxiv.org/abs/2006.14480 . |
| [71] | KIM H, KIM D, KIM G, et al. Multi-head attention based probabilistic vehicle trajectory prediction[C]//2020 IEEE Intelligent Vehicles Symposium (IV). Las Vegas, NV, USA: IEEE, 2020: 1720-1725. |
| [72] |
RUDENKO A, PALMIERI L, HERMAN M, et al. Human motion trajectory prediction: A survey[J]. The International Journal of Robotics Research, 2020, 39(8):895-935.
doi: 10.1177/0278364920917446 URL |
| [73] | ETESAMI J, GEIGER P. Causal transfer for imitation learning and decision making under sensor-shift[C]// Proceedings of the AAAI Conference on Artificial Intelligence, 2020, 34(6):10118-10125. |
| [74] | MESSAOUD K, YAHIAOUI I, VERROUST-BLONDET A, et al. Relational recurrent neural networks for vehicle trajectory prediction[C]//2019 IEEE Intelligent Transportation Systems Conference (ITSC). Auckland, New Zealand: IEEE, 2019: 19193897. |
| [75] | WANG X, NAIR S, ALTHOFF M. Falsification-based robust adversarial reinforcement learning[EB/OL]. (2020-07-01) [2020-06-14]. https://arxiv.org/abs/2007.00691 . |
| [76] | BHATTACHARYYA R P, SENANAYAKE R, BROWN K, et al. Online parameter estimation for human driver behavior prediction[C]//2020 American Control Conference (ACC). Denver, CO, USA: IEEE, 2020: 19830660. |
| [77] | QIAO Z Q, ZHAO J, ZHU J, et al. Human driver behavior prediction based on UrbanFlow[C]//2020 IEEE International Conference on Robotics and Automation (ICRA). Paris, France: IEEE, 2020: 10570-10576. |
| [78] |
MESSAOUD K, YAHIAOUI I, VERROUST-BLONDET A, et al. Attention based vehicle trajectory prediction[J]. IEEE Transactions on Intelligent Vehicles, 2021, 6(1):175-185.
doi: 10.1109/TIV URL |
| [79] | SUN L T, ZHAN W, HU Y P, et al. Interpretable modelling of driving behaviors in interactive driving scenarios based on cumulative prospect theory[C]//2019 IEEE Intelligent Transportation Systems Conference (ITSC). Auckland, New Zealand: IEEE, 2019: 4329-4335. |
| [80] | HU Y P, ZHAN W, TOMIZUKA M. Scenario-transferable semantic graph reasoning for interaction-aware probabilistic prediction[EB/OL]. (2020-04-01)[2020-06-14]. https://www.researchgate.net/publication/340500370_Scenario-Transferable_Semantic_Graph_Reasoning_for_Interaction-Aware_Probabilistic_Prediction . |
| [81] | SHU K Q, YU H L, CHEN X X, et al. Autonomous driving at intersections: A critical-turning-point approach for left turns[C]//2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC). Rhodes, Greece: IEEE, 2020: 1-6. |
| [82] | SHU K, YU H L, CHEN X X, et al. Autonomous driving at intersections: A critical-turning-point approach for left turns[C]//2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC). Rhodes, Greece: IEEE, 2020: 20303092. |
| [83] |
FENG D, HAASE-SCHÜTZ C, ROSENBAUM L, et al. Deep multi-modal object detection and semantic segmentation for autonomous driving: Datasets, methods, and challenges[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(3):1341-1360.
doi: 10.1109/TITS.6979 URL |
| [84] | CHANDRA R, GUAN T, PANUGANTI S, et al. Forecasting trajectory and behavior of road-agents using spectral clustering in graph-LSTMs[J]. IEEE Robotics and Automation Letters, 2020, 5(3):19741183. |
| [85] | SALZMANN T, IVANOVIC B, CHAKRAVARTY P, et al. Trajectron++: Dynamically-feasible trajectory forecasting with heterogeneous data[C]//European Conference on Computer Vision-ECCV 2020. Glasgow, UK: Springer, 2020: 683-700. |
| [86] | GADD M, DE MARTINI D, MARCHEGIANI L, et al. Sense-assess-eXplain (SAX): Building trust in autonomous vehicles in challenging real-world driving scenarios[C]//2020 IEEE Intelligent Vehicles Symposium (IV). Las Vegas, NV, USA: IEEE, 2020: 150-155. |
| [1] | HU Yikai, ZHUANG Hanyang, WANG Chunxiang, YANG Ming. Stackelberg-Game-Based Intelligent Vehicle Decision Method for Merging Scenarios [J]. Journal of Shanghai Jiao Tong University, 2021, 55(8): 1027-1034. |
| [2] | YAO Tong (姚 彤), WANG Chunxiang(王春香), QIAN Yeqiang(钱烨强). Camera-Radar Fusion Sensing System Based on Multi-Layer Perceptron [J]. J Shanghai Jiaotong Univ Sci, 2021, 26(5): 561-568. |
| [3] | ZHENG Dezhong, YANG Yuanyuan, XIE Zhe, NI Yangfan, LI Wentao. Data Splitting Method of Distance Metric Learning Based on Gaussian Mixed Model [J]. Journal of Shanghai Jiao Tong University, 2021, 55(2): 131-140. |
| [4] | WANG Shufeng,ZHANG Junxin,ZHANG Junyou. Intelligent Vehicles Formation Control Based on Artificial Potential Field and Virtual Leader [J]. Journal of Shanghai Jiaotong University, 2020, 54(3): 305-311. |
| [5] | HU Bing,YANG Ming,GUO Lindong,WANG Chunxiang,WANG Bing. Global Localization for Intelligent Vehicles Using Ground SURF [J]. Journal of Shanghai Jiaotong University, 2019, 53(2): 203-208. |
| [6] | HUA Yiding (华一丁), GONG Jinfeng (龚进峰), RONG Hui (戎辉), WANG Wenyang (王文扬), GUO Peng (郭蓬), HE Jia (何佳). Intelligent Vehicle Human-Simulated Steering Characteristics Access and Control Strategy [J]. Journal of Shanghai Jiao Tong University (Science), 2018, 23(Sup. 1): 117-123. |
| [7] | WANG Qihui (王齐辉), XI Yan (奚岩), CHEN Yi (陈毅),ZHANG Weikang (张伟康), ZHAO Jun* (赵俊). CT Reconstruction with Priori MRI Images Through Multi-Group Datasets Expansion [J]. Journal of Shanghai Jiao Tong University (Science), 2017, 22(6): 756-762. |
| [8] | WANG Jin,ZHAO Rui,CAO Baolin,DENG Xin,CHEN Qiaosong. Lane Detection and Steering Control of Vision-Based Micro-Intelligent Vehicle [J]. Journal of Shanghai Jiaotong University, 2015, 49(08): 1159-1167. |
| [9] |
PENG Xinronga,YANG Minga,XIE Qiangdea,WANG Binga,WANG Chunxiangb . An InterVehicle Communication Protocol for MultiVehicle Cooperation Based on RRALOHA [J]. Journal of Shanghai Jiaotong University, 2010, 44(09): 1211-1216. |
| [10] | WU Shun-xi, YANG Ming . Natural Polemap Dased Localization for Intelligent Vehicles [J]. Journal of Shanghai Jiaotong University, 2008, 42(10): 1745-1748. |
| Viewed | ||||||
|
Full text 1509
|
|
|||||
|
Abstract |
|
|||||