上海交通大学学报 ›› 2023, Vol. 57 ›› Issue (10): 1282-1291.doi: 10.16183/j.cnki.jsjtu.2022.191
所属专题: 《上海交通大学学报》2023年“交通运输工程”专题
黄鹤a,b, 高永博a, 茹锋a,b, 杨澜c( ), 王会峰b
), 王会峰b
收稿日期:2022-06-01
修回日期:2022-09-01
接受日期:2022-10-17
出版日期:2023-10-28
发布日期:2023-10-31
通讯作者:
杨澜
E-mail:lanyang@chd.edu.cn.
作者简介:黄鹤(1979-),教授,博士生导师,研究方向为无人系统测控、信息融合等.
基金资助:
HUANG Hea,b, GAO Yongboa, RU Fenga,b, YANG Lanc(), WANG Huifengb
Received:2022-06-01
Revised:2022-09-01
Accepted:2022-10-17
Online:2023-10-28
Published:2023-10-31
Contact:
YANG Lan
E-mail:lanyang@chd.edu.cn.
摘要:
针对无人机在三维路径规划时存在搜素范围和寻优性能不足等问题,以及现有黏菌算法(SMA)寻优精度不足, 易陷入局部最优的缺陷,提出了一种基于自适应黏菌算法(GSMA)优化的无人机三维路径规划方法.首先,根据无人机经过的实际环境,建立三维地形、威胁源和无人机自身约束条件;其次,针对搜素范围不足的问题,设计改进的Logistic混沌映射增加种群的多样性并扩大搜索范围,提升了SMA的全局搜索能力;然后,设计一种非线性自适应惯性权重因子,将线性收敛方式改进为非线性收敛,利用权重值更新黏菌位置,提高了收敛速度;最后,在算法后期中设计自适应柯西变异,增大了黏菌的搜索空间,寻优精度也得到了提高.实验结果表明,GSMA相比于灰狼优化(GWO)算法、SMA和海鸥算法(SOA)3种算法,路径更短且更平滑,收敛速度更快,寻优精度更高,同时能耗更低,进一步提升了无人机的路径规划能力.
中图分类号:
黄鹤, 高永博, 茹锋, 杨澜, 王会峰. 基于自适应黏菌算法优化的无人机三维路径规划[J]. 上海交通大学学报, 2023, 57(10): 1282-1291.
HUANG He, GAO Yongbo, RU Feng, YANG Lan, WANG Huifeng. 3D Path Planning of UAV Based on Adaptive Slime Mould Algorithm Optimization[J]. Journal of Shanghai Jiao Tong University, 2023, 57(10): 1282-1291.
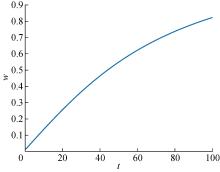
图1
w系数变化图
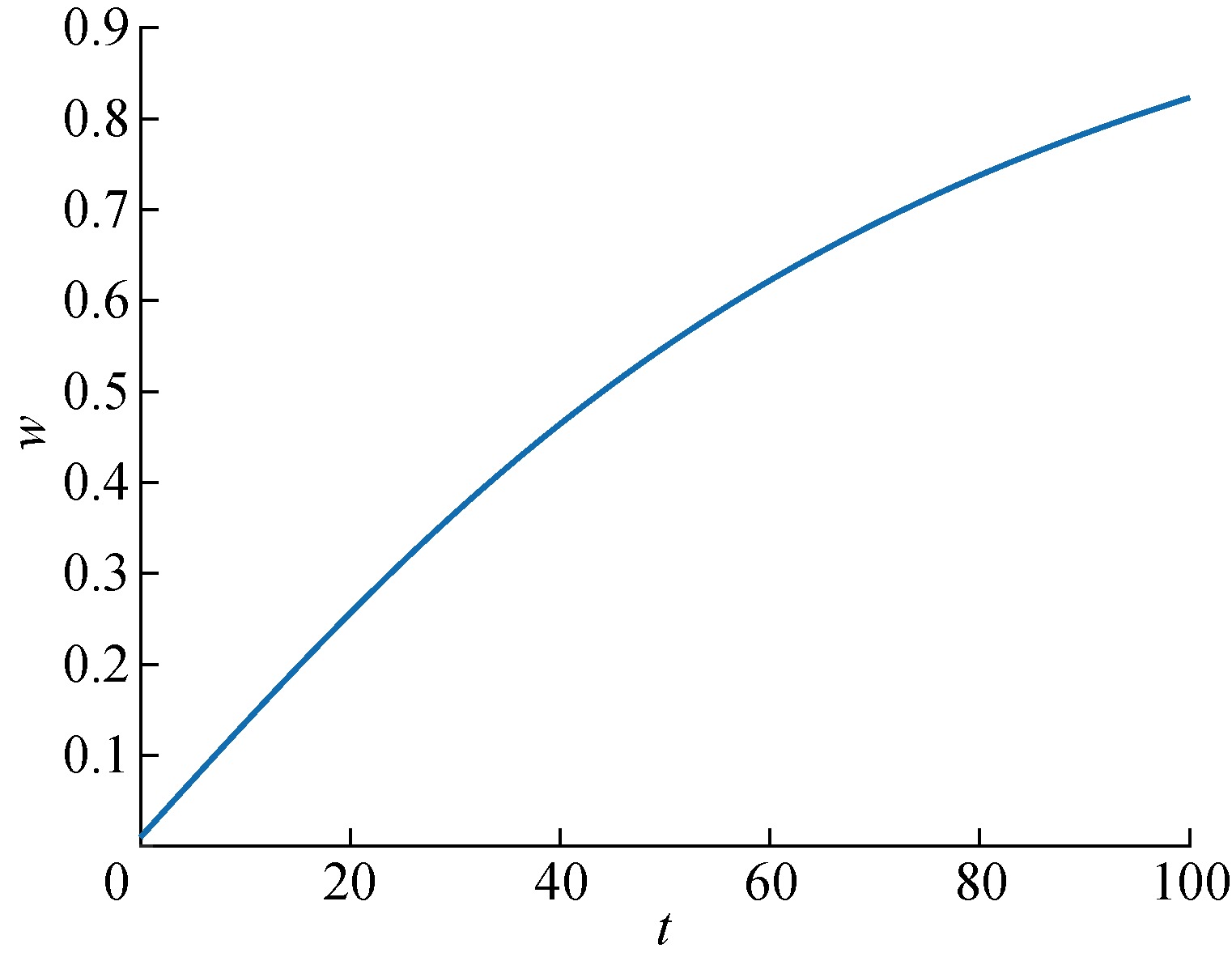

图2
GSMA收敛过程
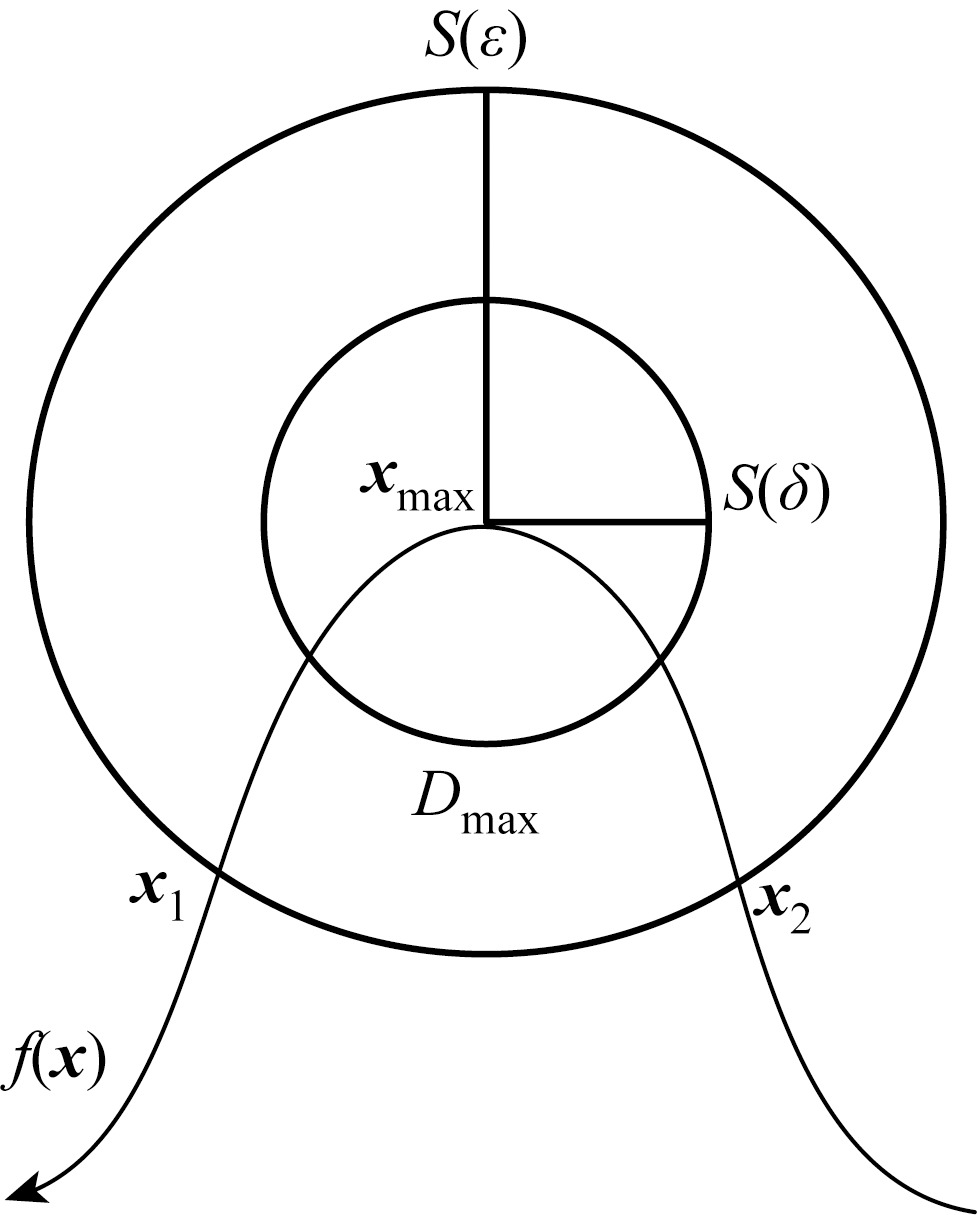
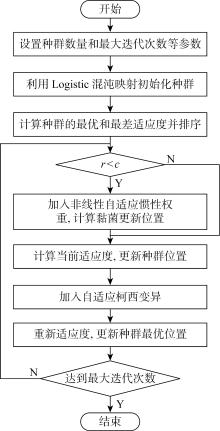
图3
算法流程图

图4
各测试函数上的适应度变化曲线
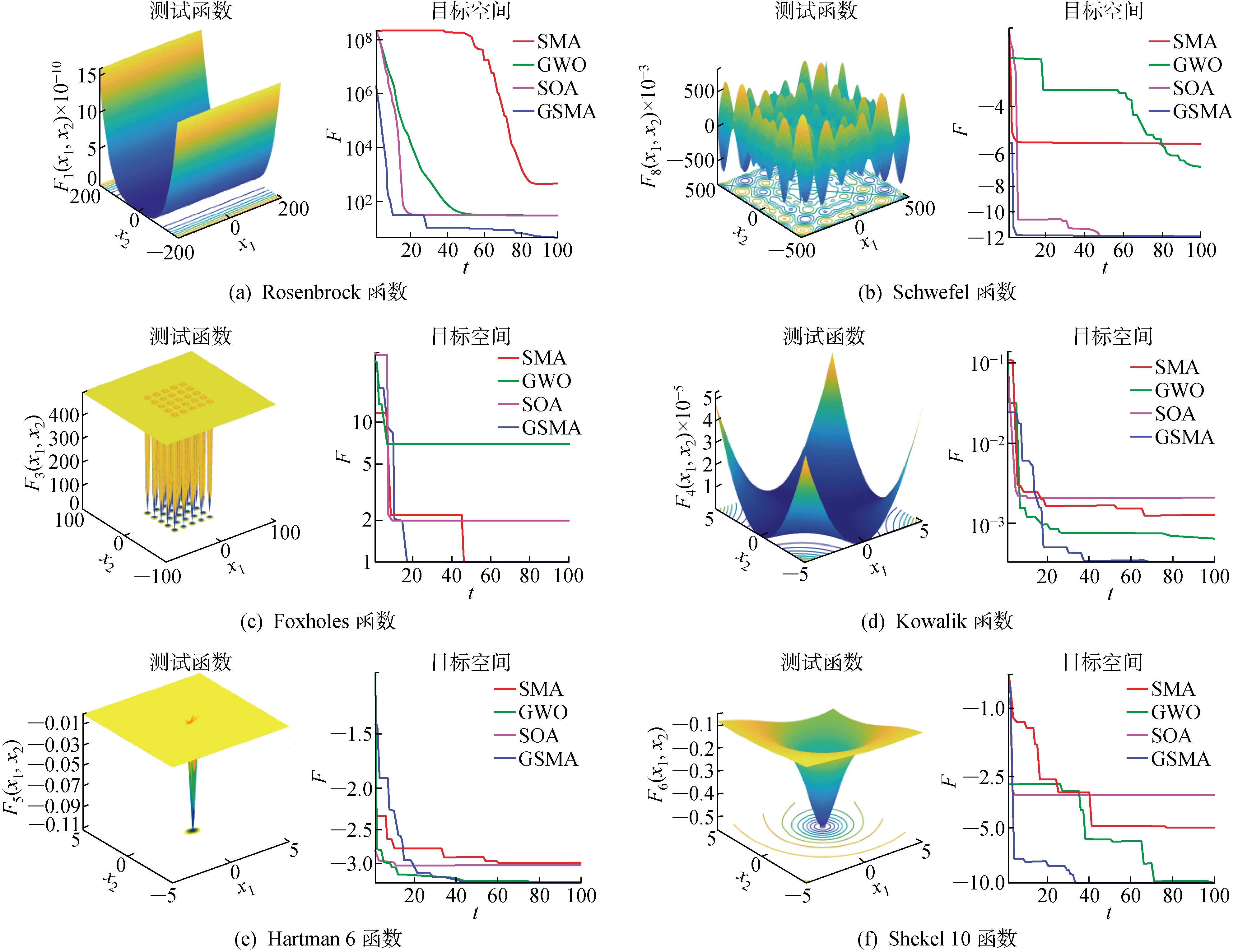
表1
4种算法在测试函数上的实验对比
| 测试函数 | 算法 | Fbest | Favg |
|---|---|---|---|
| Rosenbrock | SMA | 28.63 | 28.98 |
| GWO | 28.17 | 28.34 | |
| SOA | 29.67 | 29.93 | |
| GSMA | 27.89 | 28.15 | |
| Schwefel | SMA | -1.22×104 | -1.31×104 |
| GWO | -5.66×103 | -5.61×103 | |
| SOA | -5.66×103 | -5.66×103 | |
| GSMA | -1.26×104 | -1.32×104 | |
| Foxholes | SMA | 0.068 | 0.153 8 |
| GWO | 2.699 | 2.981 | |
| SOA | 0.928 | 0.563 | |
| GSMA | 0.076 | 0.095 | |
| Kowalik | SMA | 1.28×10-3 | 1.71×10-3 |
| GWO | 2.04×10-3 | 2.43×10-3 | |
| SOA | 2.04×10-3 | 2.12×10-3 | |
| GSMA | 6.34×10-4 | 6.97×10-4 | |
| Hartman 6 | SMA | -3.11 | -3.19 |
| GWO | -3.17 | -3.75 | |
| SOA | -2.65 | -2.82 | |
| GSMA | -3.16 | -3.27 | |
| Shekel 10 | SMA | -3.75 | -3.63 |
| GWO | -10.50 | -10.46 | |
| SOA | -4.87 | -4.87 | |
| GSMA | -10.56 | -10.53 |
表2
主要建模参数
| 参数 | 数值 |
|---|---|
| v/(km·h-1) | 30~40 |
| KZ | 100 |
| K'Z | 100 |
| KF | 100 |
| kd | 0.6 |
| kg/(km·s-2) | 5 |
| Qh | 10 |
| Qv | 10 |
| amax | 60 |
| βmax | 60 |
| Kthr | Rmax,p/3 |
| ω1 | 0.23 |
| ω2 | 0.45 |
| ω3 | 0.2 |
| ω4 | 0.12 |
| d | 15 |

图5
地形1仿真结果图
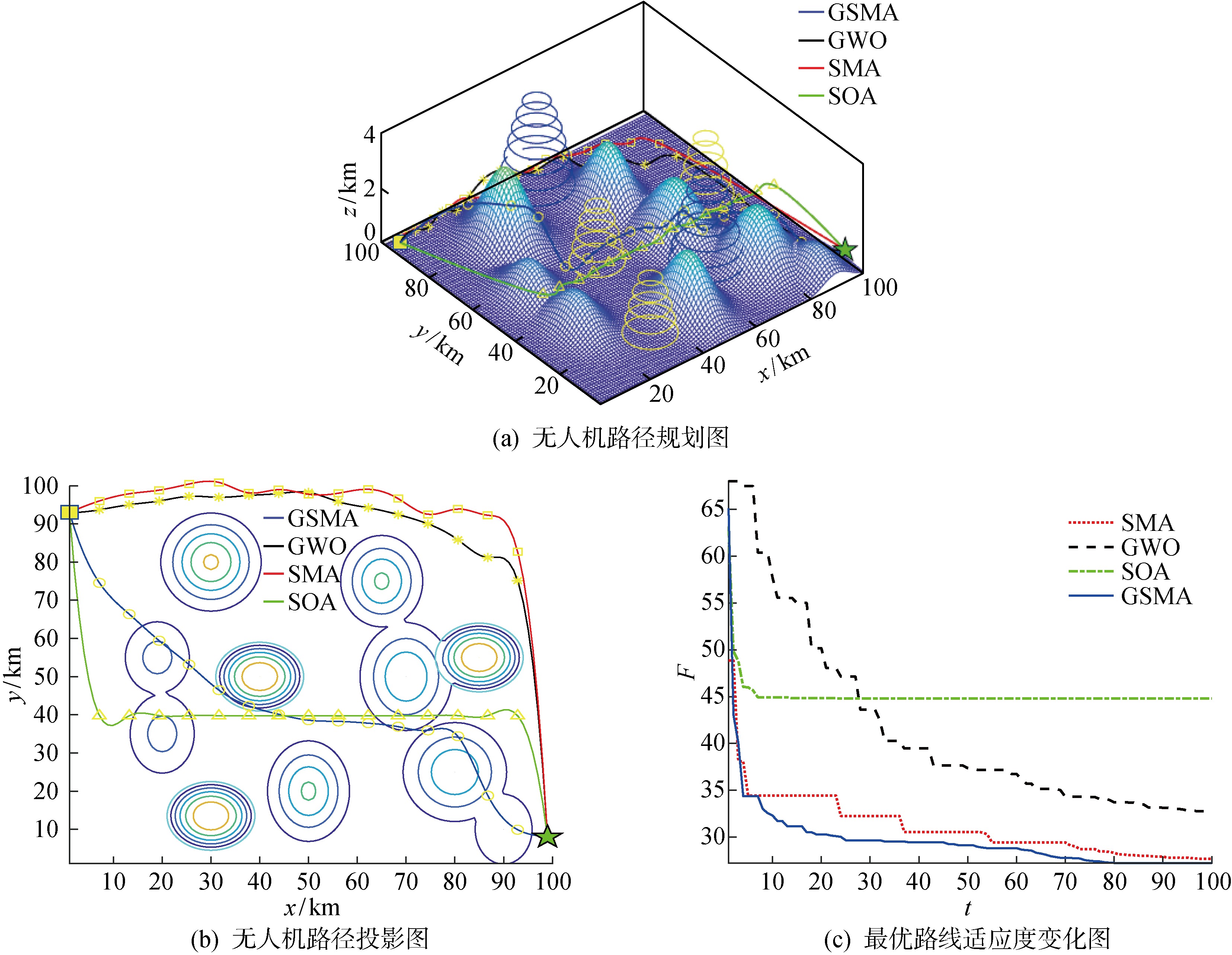

图6
地形2仿真结果图

表3
地形1仿真结果统计
| 算法 | 航程/km | 最优适应度 | 转弯和 爬升角代价 | 寻优 成功率/% |
|---|---|---|---|---|
| SMA | 166.23 | 30.86 | 100 | 76 |
| GWO | 159.38 | 34.09 | 70 | 79 |
| SOA | 162.17 | 36.72 | 120 | 82 |
| GSMA | 133.54 | 29.43 | 10 | 95 |
表4
地形2仿真结果统计
| 算法 | 航程/km | 最优 适应度 | 转弯和 爬升角代价 | 寻优 成功率/% |
|---|---|---|---|---|
| SMA | 165.43 | 27.06 | 100 | 85 |
| GWO | 163.85 | 34.37 | 80 | 78 |
| SOA | 171.65 | 37.78 | 90 | 75 |
| GSMA | 139.86 | 28.89 | 20 | 93 |
| [1] |
EVDOKIMENKOV V N, KRASILSHCHIKOV M N, LYAPIN N A. Guaranteeing UAV trajectory control when approaching a maneuvering air target[J]. Journal of Computer and Systems Sciences International, 2018, 57(5): 789-800.
doi: 10.1134/S1064230718050040 |
| [2] |
GALYAEV A A, LYSENKO P V, YAKHNO V P. 2D optimal trajectory planning problem in threat environment for UUV with non-uniform radiation pattern[J]. Sensors, 2021, 21(2): 396.
doi: 10.3390/s21020396 URL |
| [3] |
GUO Y, LIU X, ZHANG W, et al. 3D path planning method for UAV based on improved artificial potential field[J]. Journal of Northwestern Polytechnical University, 2020, 38(5): 977-986.
doi: 10.1051/jnwpu/20203850977 URL |
| [4] | MANDLOI D, ARYA R, VERMA A K. Unmanned aerial vehicle path planning based on A* algorithm and its variants in 3D environment[J]. International Journal of Systems Assurance Engineering and Management, 2021(1): 1-11. |
| [5] |
LIU X H, ZHANG D, ZHAN J, et al. A path planning method based on the particle swarm optimization trained fuzzy neural network algorithm[J]. Cluster Computing, 2021, 24(3): 1901-1915.
doi: 10.1007/s10586-021-03235-1 |
| [6] |
SOUNDARYA M S, ANUSHA D K, ROHITH P, et al. Optimal path planning of UAV using grey wolf optimiser[J]. International Journal of Computational Systems Engineering, 2019, 5(3): 129-136.
doi: 10.1504/IJCSYSE.2019.10022445 URL |
| [7] | 黄鹤, 李潇磊, 杨澜, 等. 引入改进蝠鲼觅食优化算法的水下无人航行器三维路径规划[J]. 西安交通大学学报, 2022, 56(7): 9-18. |
| HUANG He, LI Xiaolei, YANG Lan, et al. 3D path planning for unmanned underwater vehicles using improved manta foraging optimization algorithm[J]. Journal of Xi’an Jiaotong University, 2022, 56(7): 9-18. | |
| [8] | 王翼虎, 王思明. 基于改进粒子群算法的无人机路径规划[J]. 计算机工程与科学, 2020, 42(9): 1690-1696. |
| WANG Yihu, WANG Siming. UAV path planning based on improved particle swarm optimization[J]. Computer Engineering and Science, 2020, 42(9): 1690-1696. | |
| [9] |
黄书召, 田军委, 乔路, 等. 基于改进遗传算法的无人机路径规划[J]. 计算机应用, 2021, 41(2): 390-397.
doi: 10.11772/j.issn.1001-9081.2020060797 |
| HUANG Shuzhao, TIAN Junwei, QIAO Lu, et al. UAV path planning based on improved genetic algorithm[J]. Computer Application, 2021, 41(2): 390-397. | |
| [10] | 吴坤, 谭劭昌. 基于改进鲸鱼优化算法的无人机航路规划[J]. 航空学报, 2020, 41(Sup.2): 107-114. |
| WU Kun, TAN Shaochang. UAV route planning based on improved whale optimization algorithm[J]. Aeronautical Journal, 2020, 41 (Sup.2): 107-114. | |
| [11] |
LI S, CHEN H, WANG M, et al. Slime mould algorithm: A new method for stochastic optimization[J]. Future Generation Computer Systems. 2020, 111(1): 300-323.
doi: 10.1016/j.future.2020.03.055 URL |
| [12] | 肖亚宁, 孙雪. 基于混沌精英黏菌算法的无刷直流电机转速控制[J]. 科学技术与工程, 2021, 50(28): 4-5. |
| XIAO Yaning, SUN Xue. Brushless DC motor speed control based on chaotic elite slime mould algorithm[J]. Science Technology and Engineering, 2021, 50(28): 4-5. | |
| [13] |
高文欣, 刘升, 肖子雅, 等. 柯西变异和自适应权重优化的蝴蝶算法[J]. 计算机工程与应用, 2020, 56(15): 43-50.
doi: 10.3778/j.issn.1002-8331.1907-0048 |
|
GAO Wenxin, LIU Sheng, XIAO Ziya, et al. Butterfly algorithm for Cauchy variation and adaptive weight optimization[J]. Computer Engineering and Applications, 2020, 56(15): 43-50.
doi: 10.3778/j.issn.1002-8331.1907-0048 |
|
| [14] | 郭雨鑫, 刘升, 高文欣, 等. 多策略改进哈里斯鹰优化算法[J]. 微电子学与计算机, 2021, 38(7): 18-24. |
| GUO Yuxin, LIU Sheng, GAO Wenxin, et al. Multi-strategy improved Harris hawk optimization algorithm[J]. Microelectronics and Computer Science, 2021, 38(7): 18-24. | |
| [15] | 王涛. 非线性权重和柯西变异的蝗虫算法[J]. 微电子学与计算机, 2020, 37(5): 82-86. |
| WANG Tao. Locust algorithm for nonlinear weights and Cauchy variation[J]. Microelectronics and Computers, 2020, 37(5): 82-86. | |
| [16] | 王永琦, 江潇潇. 基于混合灰狼算法的机器人路径规划[J]. 计算机工程与科学, 2020, 42(7): 1294-1301. |
| WANG Yongqi, JIANG Xiaoxiao. Robot path planning based on hybrid gray wolf algorithm[J]. Computer Engineering and Science, 2020, 42(7): 1294-1301. | |
| [17] | 岳文静, 孙鹏, 陈志. 基于改进海鸥算法的认知无人机网络频谱分配[J]. 计算机技术与发展, 2021, 31(9): 7-12. |
| YUE Wenjing, SUN Peng, CHEN Zhi. Spectrum allocation for cognitive UAV networks based on improved seagull algorithm[J]. Computer Technology and Development, 2021, 31(9): 7-12. |
| [1] | . 合成数据驱动的无人机检测与分类多任务框架[J]. J Shanghai Jiaotong Univ Sci, 2026, 31(1): 209-220. |
| [2] | 夏筱彦, 张宇, 胡锡坤, 钟平. 基于扩散模型的无人机遥感目标检测物理对抗攻击方法研究[J]. 空天防御, 2026, 9(1): 52-62. |
| [3] | . 无人机协助和用户协作的非线性能量收集移动边缘计算系统资源分配方法[J]. J Shanghai Jiaotong Univ Sci, 2025, 30(6): 1220-1231. |
| [4] | 崔思远, 李浩, 范翔宇, 倪磊, 侯佳航. 基于AMDE-DMPC算法的多无人机协同目标搜索方法[J]. 空天防御, 2025, 8(6): 35-44. |
| [5] | 王志博, 呼卫军, 马先龙, 全家乐, 周皓宇. 感知驱动控制的无人机拦截碰撞技术[J]. 空天防御, 2025, 8(4): 78-84. |
| [6] | 葛鲁亲, 丁士洲, 姚强, 张诚, 黄雨辰. 无人机抗电磁干扰机理与抗干扰技术研究综述[J]. 空天防御, 2025, 8(4): 51-55. |
| [7] | . 血管介入手术路径规划及三维视觉导航[J]. J Shanghai Jiaotong Univ Sci, 2025, 30(3): 472-481. |
| [8] | 李奕佳, 李嘉诺, 柯良军. 基于强化学习的无人机协作防守策略设计与验证[J]. 空天防御, 2025, 8(3): 73-85. |
| [9] | 孙亮, 王明宇, 周素华, 雷荣强. 重点城市要点防卫小型无人机袭扰作战问题研究[J]. 空天防御, 2025, 8(2): 112-117. |
| [10] | 李书恒, 何德峰, 廖飞, 穆建彬. 基于非线性前馈补偿的六旋翼无人机姿态稳定反步控制[J]. 上海交通大学学报, 2025, 59(12): 1891-1900. |
| [11] | 董德金, 王常成, 蔡云泽. 基于改进多目标进化算法的栅格地图路径规划[J]. 上海交通大学学报, 2025, 59(10): 1558-1567. |
| [12] | 李楚晨, 唐善军, 赵冰青. 一种基于无人机探测图像区块信息的弱小目标检测算法[J]. 空天防御, 2025, 8(1): 41-47. |
| [13] | 何通, 韦亚利, 卢青, 毕千. 无人机群协同侦察多点目标路径规划与控制[J]. 空天防御, 2025, 8(1): 31-40. |
| [14] | 吴桐, 亓统帅, 谢伟朋. 无人机集群反制技术研究[J]. 空天防御, 2025, 8(1): 17-23. |
| [15] | 赵钱, 赵炜, 王航, 朱玉虎, 孔晓俊. 美军有人/无人机协同作战项目介绍及发展趋势研判[J]. 空天防御, 2025, 8(1): 24-30. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||