上海交通大学学报 ›› 2022, Vol. 56 ›› Issue (10): 1379-1387.doi: 10.16183/j.cnki.jsjtu.2021.202
所属专题: 《上海交通大学学报》2022年“机械与动力工程”专题
韩超1, 陈敏1, 黄宇昊1, 赵明辉2, 杜乾坤1, 梁庆华1( )
)
收稿日期:2021-06-11
出版日期:2022-10-28
发布日期:2022-11-03
通讯作者:
梁庆华
E-mail:qhliang@sjtu.edu.cn.
作者简介:韩 超(1997-),男,浙江省宁波市人,硕士生,主要从事井下无人机定位技术研究.
HAN Chao1, CHEN Min1, HUANG Yuhao1, ZHAO Minghui2, DU Qiankun1, LIANG Qinhua1()
Received:2021-06-11
Online:2022-10-28
Published:2022-11-03
Contact:
LIANG Qinhua
E-mail:qhliang@sjtu.edu.cn.
摘要:
针对井下环境中设备巡检时定位误差随时间不断累积的问题,提出一种适用于激光同步定位和建图技术的基于点云全局特征描述子的回环检测方法.该方法利用曲率计算点云中特征点的特征向量,通过特征向量与中心点坐标系的角度分布和尺度分布关系构建点云全局特征描述子;使用部分特征点进行位姿变换的计算,提高计算效率.通过仿真实验和开源数据集实验对所提算法进行验证.实验结果表明,所提算法在定位精度和实时性上提升明显,可以有效解决定位算法在长时间运行过程中的累积误差和全局一致性差的问题.
中图分类号:
韩超, 陈敏, 黄宇昊, 赵明辉, 杜乾坤, 梁庆华. 基于全局特征描述子的激光SLAM回环检测方法[J]. 上海交通大学学报, 2022, 56(10): 1379-1387.
HAN Chao, CHEN Min, HUANG Yuhao, ZHAO Minghui, DU Qiankun, LIANG Qinhua. Loop Closure Detection Method of Laser SLAM Based on Global Feature Descriptor[J]. Journal of Shanghai Jiao Tong University, 2022, 56(10): 1379-1387.
图1
基于全局特征描述子的回环检测算法流程
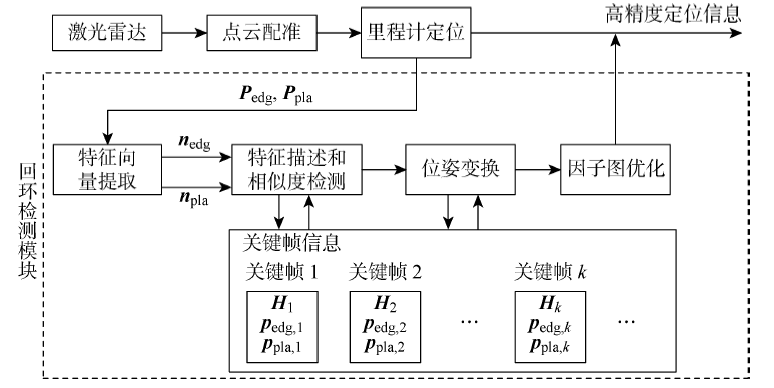

图2
全局点云下的uvw坐标系
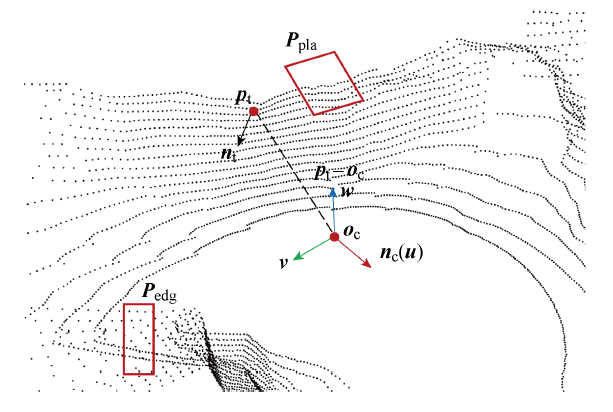
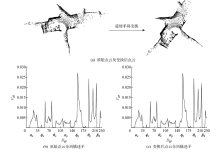
图3
旋转和平移不变性实验
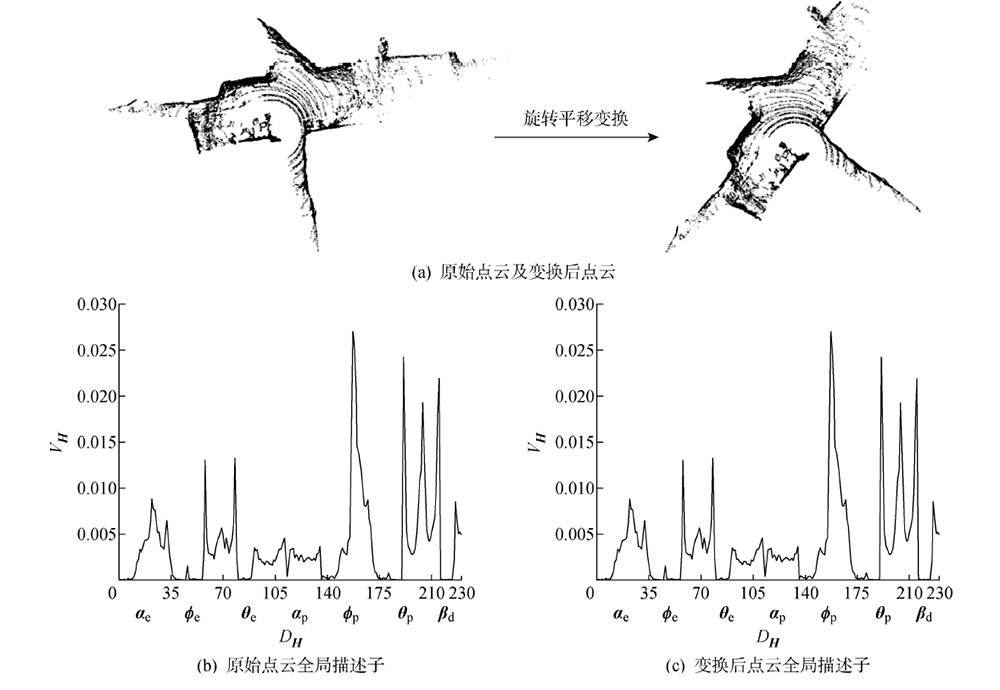
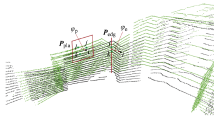
图4
边角特征和平面特征点云配准
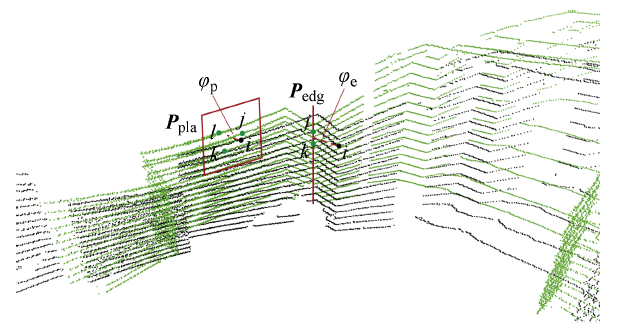

图5
因子图优化模型
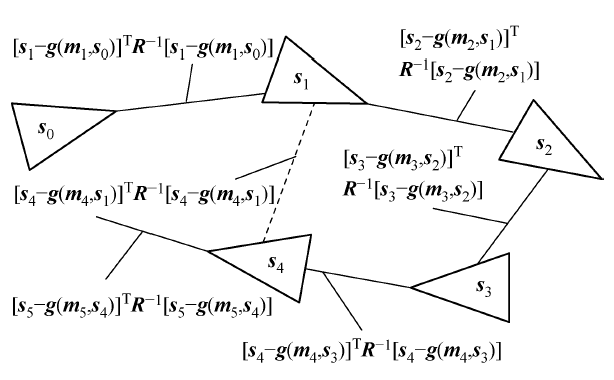
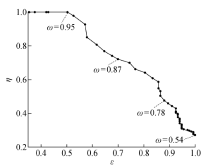
图6
准确率和召回率曲线
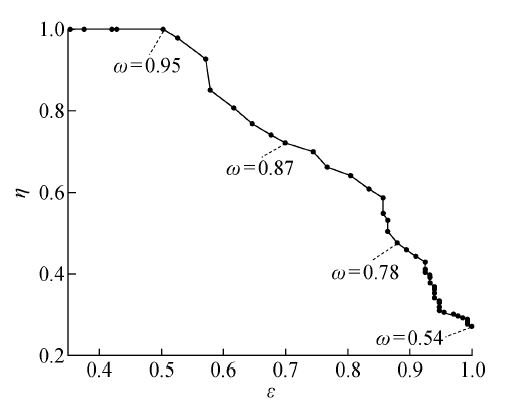

图7
井下仿真实验环境
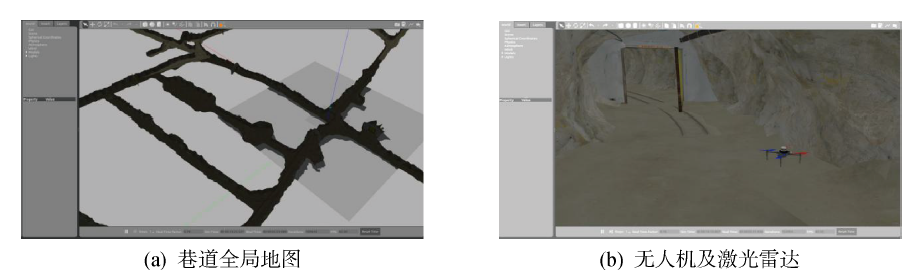
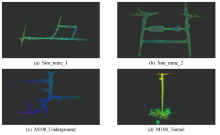
图8
实验场景点云地图
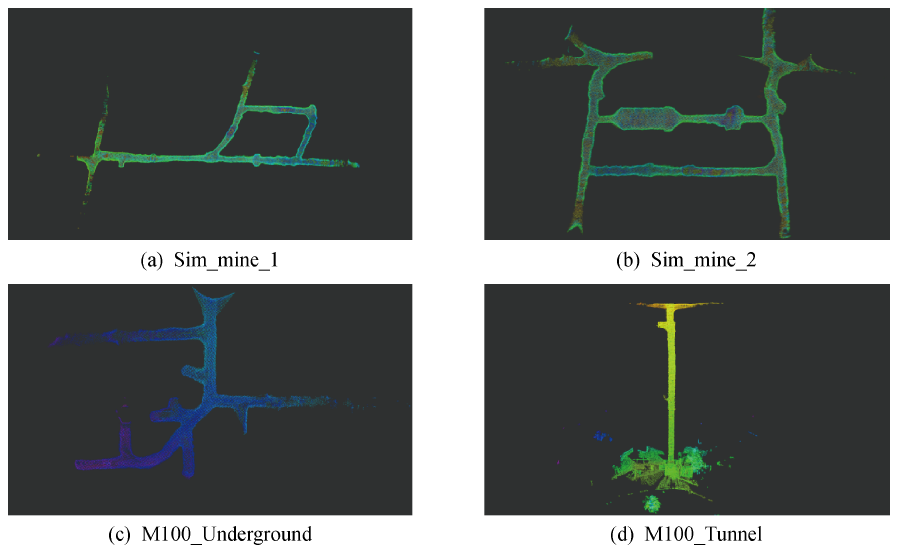
表1
定位精度实验结果
| 序号 | 实验算法 | 最大 误差/m | 终点 误差/m | 均方根 误差/m | 巡检 距离/m |
|---|---|---|---|---|---|
| 1 | LOAM | 3.48863 | 3.45962 | 1.52933 | 618.007 |
| LOAM+ICP | 2.50563 | 0.14402 | 1.03654 | 618.007 | |
| 本文算法 | 1.46447 | 0.06376 | 0.58827 | 618.007 | |
| 2 | LOAM | 1.69615 | 1.53225 | 0.83298 | 638.446 |
| LOAM+ICP | 0.54603 | 0.02760 | 0.32963 | 638.446 | |
| 本文算法 | 0.40609 | 0.02806 | 0.17783 | 638.446 | |
| 3 | LOAM | 1.16494 | 1.15254 | 0.71497 | 264.852 |
| LOAM+ICP | 0.82921 | 0.08813 | 0.43781 | 264.852 | |
| 本文算法 | 0.47062 | 0.09923 | 0.21525 | 264.852 | |
| 4 | LOAM | 1.92765 | 0.16456 | 1.06969 | 197.782 |
| LOAM+ICP | 0.45537 | 0.04628 | 0.22482 | 197.782 | |
| 本文算法 | 0.39201 | 0.05806 | 0.15977 | 197.782 |

图9
Sim_mine_1定位实验轨迹
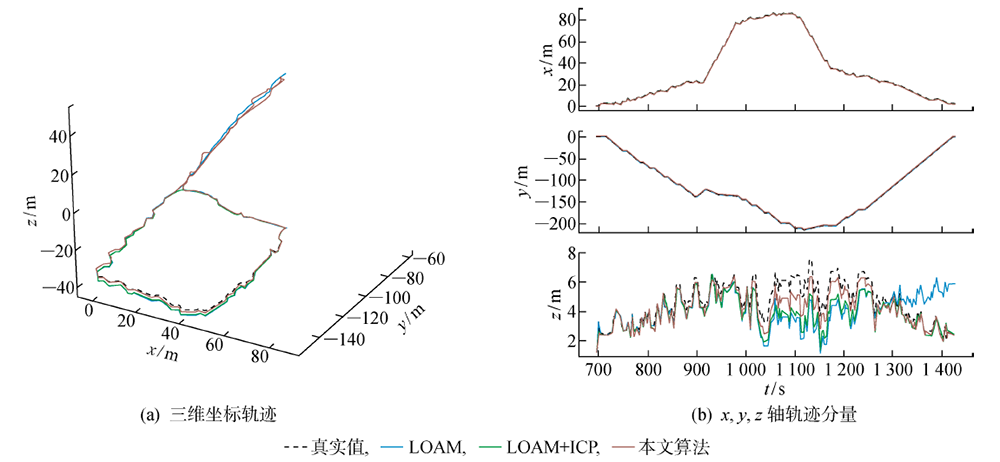
表2
算法各模块运行时间
| 算法 | 相似度检测 时间/ms | 位姿计算 时间/ms | 回环时间/ms |
|---|---|---|---|
| LOAM+ICP | 12.6676 | 122.3668 | 147.0491 |
| 本文算法 | 16.2595 | 67.4053 | 88.7274 |
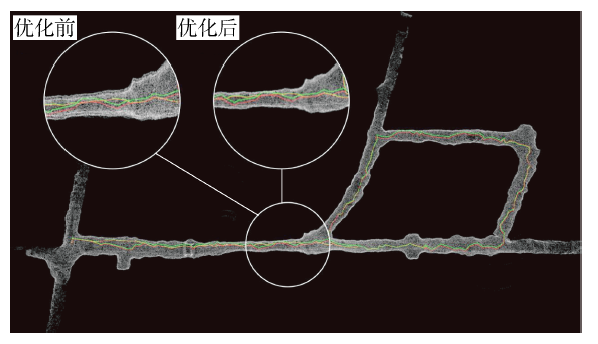
图10
因子图优化前后轨迹
| [1] | 裴福俊, 李昊洋, 武玫. 基于分布式无味边缘粒子滤波的同步定位与地图构建[J]. 上海交通大学学报, 2014, 48(7): 987-992. |
| PEI Fujun, LI Haoyang, WU Mei. Distributed unscented marginalized particle filter for simultaneous localization and mapping[J]. Journal of Shanghai Jiao Tong University, 2014, 48(7): 987-992. | |
| [2] | AZHARI F, KIELY S, SENNERSTEN C, et al. A comparison of sensors for underground void mapping by unmanned aerial vehicles[C]//Proceedings of the First International Conference on Underground Mining Technology. Perth, Australia: ACG, 2017: 419-430. |
| [3] | 杨晶东, 彭坤, 顾浩楠, 等. 基于直线特征的机器人自主定位方法[J]. 上海交通大学学报, 2018, 52(9): 1120-1124. |
| YANG Jingdong, PENG Kun, GU Haonan, et al. Autonomous localisation method based on linear feature for robots[J]. Journal of Shanghai Jiao Tong University, 2018, 52(9): 1120-1124. | |
| [4] |
REN Z L, WANG L G, BI L. Robust GICP-based 3D LiDAR SLAM for underground mining environment[J]. Sensors, 2019, 19(13): 2915.
doi: 10.3390/s19132915 URL |
| [5] |
LI M G, ZHU H, YOU S Z, et al. Efficient laser-based 3D SLAM for coal mine rescue robots[J]. IEEE Access, 2019, 7: 14124-14138.
doi: 10.1109/ACCESS.2018.2889304 |
| [6] |
MUR-ARTAL R, TARDÓS J D. ORB-SLAM2: An open-source SLAM system for monocular, stereo, and RGB-D cameras[J]. IEEE Transactions on Robotics, 2017, 33(5): 1255-1262.
doi: 10.1109/TRO.2017.2705103 URL |
| [7] |
QIN T, LI P L, SHEN S J. VINS-mono: A robust and versatile monocular visual-inertial state estimator[J]. IEEE Transactions on Robotics, 2018, 34(4): 1004-1020.
doi: 10.1109/TRO.2018.2853729 URL |
| [8] |
GALVEZ-LÓPEZ D, TARDOS J D. Bags of binary words for fast place recognition in image sequences[J]. IEEE Transactions on Robotics, 2012, 28(5): 1188-1197.
doi: 10.1109/TRO.2012.2197158 URL |
| [9] | SHAN T X, ENGLOT B. LeGO-LOAM: Lightweight and ground-optimized lidar odometry and mapping on variable terrain[C]//2018 IEEE/RSJ International Conference on Intelligent Robots and Systems. Madrid, Spain:IEEE, 2018: 4758-4765. |
| [10] | SHAN T X, ENGLOT B, MEYERS D, et al. LIO-SAM: Tightly-coupled lidar inertial odometry via smoothing and mapping[C]//2020 IEEE/RSJ International Conference on Intelligent Robots and Systems. Las Vegas, NV, USA: IEEE, 2021: 5135-5142. |
| [11] | 柴梦娜, 刘元盛, 任丽军. 基于激光点云NDT特征的两步回环检测[J]. 激光与红外, 2020, 50(1): 17-24. |
| CHAI Mengna, LIU Yuansheng, REN Lijun. Two-step loop closure detection based on laser point cloud NDT features[J]. Laser & Infrared, 2020, 50(1): 17-24. | |
| [12] | 李旭. 基于多线激光雷达建图的里程计优化及回环检测[D]. 哈尔滨: 哈尔滨工业大学, 2019. |
| LI Xu. Odometry optimization and loop detection based on multi-beam LiDAR mapping[D]. Harbin:Harbin Institute of Technology, 2019. | |
| [13] | ZHANG J, SINGH S. LOAM: Lidar odometry and mapping in real-time[EB/OL]. (2014-07-16) [2021-05-18]. http://www.roboticsproceedings.org/rss10/p07.pdf. |
| [14] | LIU M, POMERLEAU F, COLAS F, et al. Normal estimation for pointcloud using GPU based sparse tensor voting[C]//2012 IEEE International Conference on Robotics and Biomimetics. Guangzhou, China: IEEE, 2012: 91-96. |
| [15] | STIGLER S M. Francis galton’s account of the invention of correlation[J]. Statistical Science, 1989, 4(2): 73-79. |
| [16] | 张小利, 李雄飞, 李军. 融合图像质量评价指标的相关性分析及性能评估[J]. 自动化学报, 2014, 40(2): 306-315. |
| ZHANG Xiaoli, LI Xiongfei, LI Jun. Validation and correlation analysis of metrics for evaluating performance of image fusion[J]. Acta Automatica Sinica, 2014, 40(2): 306-315. | |
| [17] | WEN W S, KAN Y C, HSU L T. Performance comparison of GNSS/INS integrations based on EKF and factor graph optimization[C]//Proceedings of the 32nd International Technical Meeting of the Satellite Division of The Institute of Navigation. Miami, Florida, USA: Institute of Navigation, 2019: 3019-3032. |
| [18] | RATZ S, DYMCZYK M, SIEGWART R, et al. OneShot global localization: Instant LiDAR-visual pose estimation[C]//2020 IEEE International Conference on Robotics and Automation. Paris, France: IEEE, 2020: 5415-5421. |
| [19] | DANG T, KHATTAK S, MASCARICH F, et al. Explore locally, plan globally: A path planning framework for autonomous robotic exploration in subterranean environments[C]//2019 19th International Conference on Advanced Robotics. Belo Horizonte, Brazil: IEEE, 2019: 9-16. |
| [1] | 童振, 龚正, 王东泽, 王心怡, 谢子阳. 单孔腔镜手术机器人技术突破与启示:评徐凯团队术锐系统(特邀)[J]. 上海交通大学学报, 2026, 60(3): 355-363. |
| [2] | 乔文超, 聂伟民, 杜选民, 刘本奇, 叶天明, 杨天霖. 用于圆周合成孔径声呐成像的无人船圆周运动精准控制方法[J]. 上海交通大学学报, 2026, 60(1): 154-162. |
| [3] | 董德金, 王常成, 蔡云泽. 基于改进多目标进化算法的栅格地图路径规划[J]. 上海交通大学学报, 2025, 59(10): 1558-1567. |
| [4] | 曹凯, 陈阳泉, 李康, 陈超波, 阎坤, 刘伟超. 基于动态密度引导的多机器人编队队形变换方法[J]. 上海交通大学学报, 2024, 58(11): 1783-1797. |
| [5] | 赖国良, 胡钊政, 周哲, 万金杰, 任靖渊. 基于语义似然与高精度地图匹配的智能车辆同时定位与检测[J]. 上海交通大学学报, 2024, 58(10): 1618-1628. |
| [6] | 王琦, 李绿洲, 董旭, 袁宁一, 丁建宁. 轨迹可控的微型水母机器人研制[J]. 上海交通大学学报, 2024, 58(8): 1240-1248. |
| [7] | 赵威, 袁绍珂, 李忆楠, 费燕琼. 仿人表情机器人的下颌机构设计与运动[J]. 上海交通大学学报, 2024, 58(8): 1231-1239. |
| [8] | 李翠明, 王华, 徐龙儿, 王龙. 基于改进DeepLabv3+的光伏电站道路识别方法[J]. 上海交通大学学报, 2024, 58(5): 776-782. |
| [9] | 刘文倩, 单梁, 张伟龙, 刘成林, 马强. 复杂环境下基于改进Informed RRT*的无人机路径规划算法[J]. 上海交通大学学报, 2024, 58(4): 511-524. |
| [10] | 苏怡仪, 徐齐平, 刘锦阳. 气动齿状软体驱动器的理论建模、仿真分析及实验研究[J]. 上海交通大学学报, 2023, 57(8): 1016-1027. |
| [11] | 庄浩宇, 颜国正, 费倩, 汪炜, 赵凯. 肠道机器人无线供能的混合式三维发射线圈特性研究[J]. 上海交通大学学报, 2023, 57(5): 545-551. |
| [12] | 林淳, 贺越生, 方兴其, 王春香. 一种面向泊车场景智能车辆轨迹规划方法[J]. 上海交通大学学报, 2023, 57(3): 345-353. |
| [13] | 张文安, 高伟展, 刘安东. 基于动态运动原语和自适应控制的机器人技能学习[J]. 上海交通大学学报, 2023, 57(3): 354-365. |
| [14] | 王宇轩, 刘朝雨, 王江北, 费燕琼. 具有多地形运动能力的双模块软体机器人[J]. 上海交通大学学报, 2022, 56(10): 1388-1396. |
| [15] | 黄宇昊, 韩超, 赵明辉, 杜乾坤, 王石刚. 考虑安全飞行通道约束的无人机飞行轨迹多目标优化策略[J]. 上海交通大学学报, 2022, 56(8): 1024-1033. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||