上海交通大学学报 ›› 2021, Vol. 55 ›› Issue (5): 575-585.doi: 10.16183/j.cnki.jsjtu.2019.277
所属专题: 《上海交通大学学报》2021年12期专题汇总专辑; 《上海交通大学学报》2021年“自动化技术、计算机技术”专题
李鹏, 阮晓钢, 朱晓庆( ), 柴洁, 任顶奇, 刘鹏飞
), 柴洁, 任顶奇, 刘鹏飞
收稿日期:2019-09-26
出版日期:2021-05-28
发布日期:2021-06-01
通讯作者:
朱晓庆
E-mail:alex.zhuxq@bjut.edu.cn
作者简介:李 鹏(1992-),男,河北省廊坊市人,博士生,主要研究方向为机器人导航.
基金资助:
LI Peng, RUAN Xiaogang, ZHU Xiaoqing(), CHAI Jie, REN Dingqi, LIU Pengfei
Received:2019-09-26
Online:2021-05-28
Published:2021-06-01
Contact:
ZHU Xiaoqing
E-mail:alex.zhuxq@bjut.edu.cn
摘要:
针对移动机器人在分布式环境中的导航问题,提出一种基于深度强化学习的区域化视觉导航方法.首先,根据分布式环境特征,在不同区域内独立学习控制策略,同时构建区域化模型, 实现导航过程中控制策略的切换和结合.然后,为使机器人具有更好的目标导向行为,在区域导航子模块中增加奖励预测任务,并结合经验池回放奖励序列.最后,在原有探索策略的基础上添加景深约束,防止因碰撞导致的遍历停滞.结果表明: 奖励预测和景深避障的应用有助于提升导航性能.在多区域环境测试过程中,区域化模型在训练时间和所获奖励上展现出单一模型不具备的优势,表明其能更好地应对大范围导航.此外,实验在第一人称视角的3D环境下进行,状态是部分可观察的,利于实际应用.
中图分类号:
李鹏, 阮晓钢, 朱晓庆, 柴洁, 任顶奇, 刘鹏飞. 基于深度强化学习的区域化视觉导航方法[J]. 上海交通大学学报, 2021, 55(5): 575-585.
LI Peng, RUAN Xiaogang, ZHU Xiaoqing, CHAI Jie, REN Dingqi, LIU Pengfei. A Regionalization Vision Navigation Method Based on Deep Reinforcement Learning[J]. Journal of Shanghai Jiao Tong University, 2021, 55(5): 575-585.

图1
DQN模型
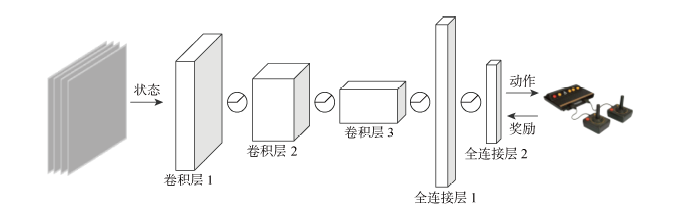

图2
DRQN模型
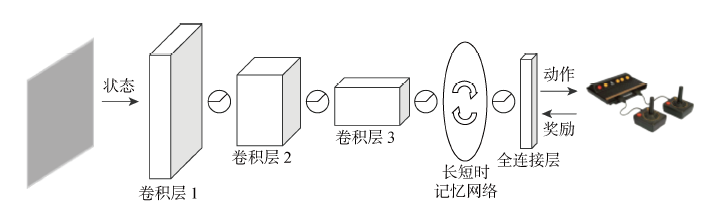
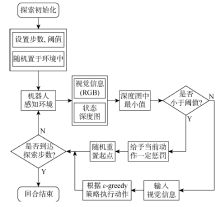
图3
探索流程
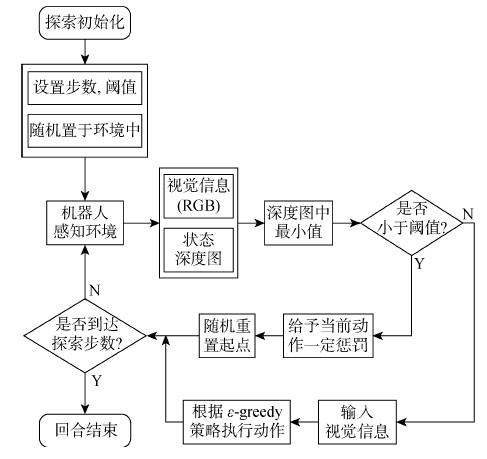
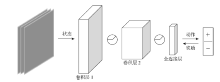
图4
奖励预测模型
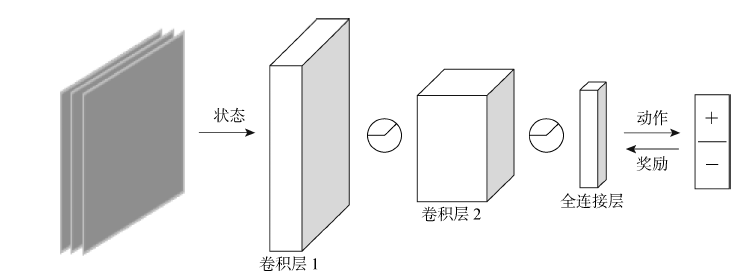
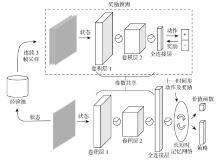
图5
区域导航子模块
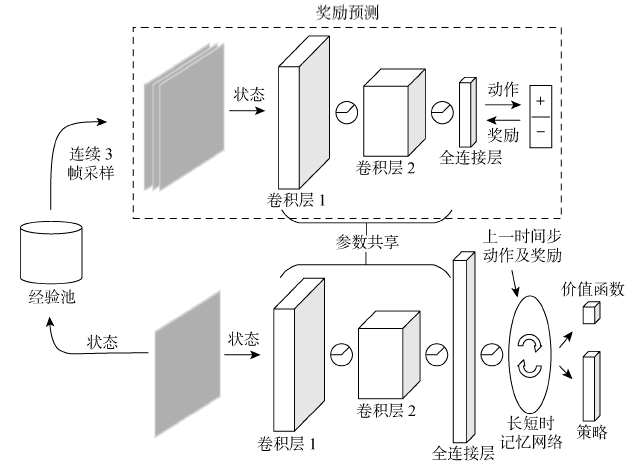
图6
多区域导航流程
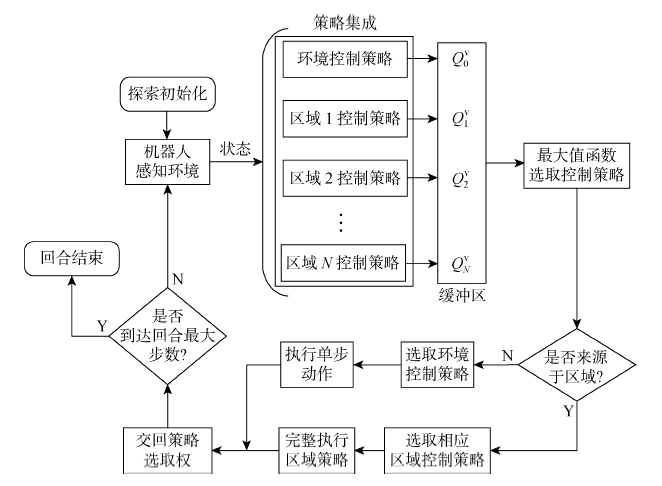
图7
仿真环境运行画面
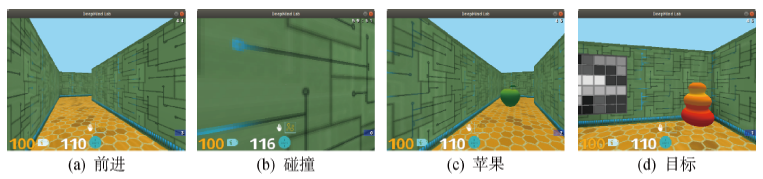
图8
测试环境
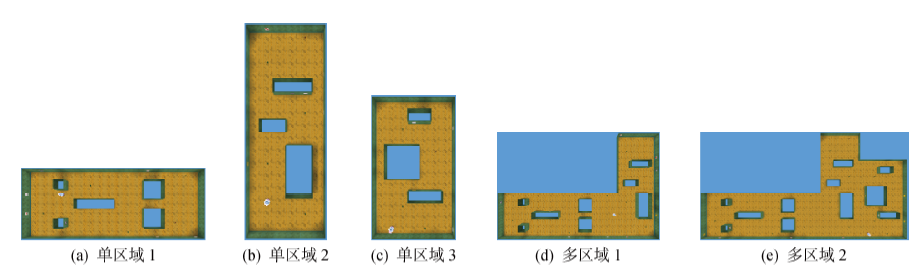
表1
神经网络参数
| 网络部分 | 动作选取 | 奖励预测 |
|---|---|---|
| 卷积层1 | 16, 8, 4 | 16, 8, 4 |
| 卷积层2 | 32, 4, 2 | 32, 4, 2 |
| 全连接层 | 256 | 128 |
| LSTM | 256 | 无 |
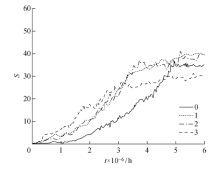
图9
不同阈值实验结果
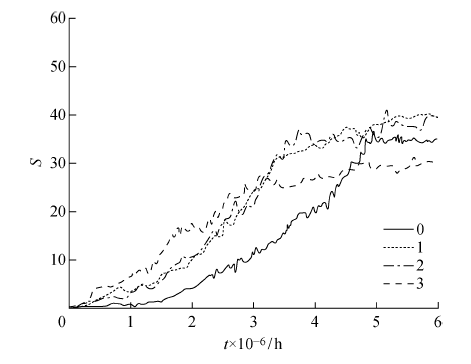

图10
探索方法实验结果
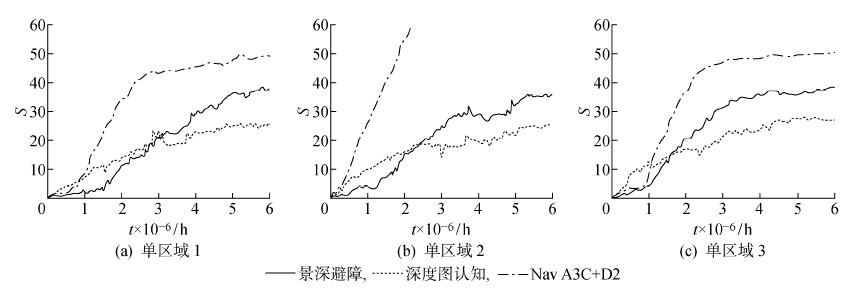

图11
奖励预测实验结果

图12
价值函数-时间图
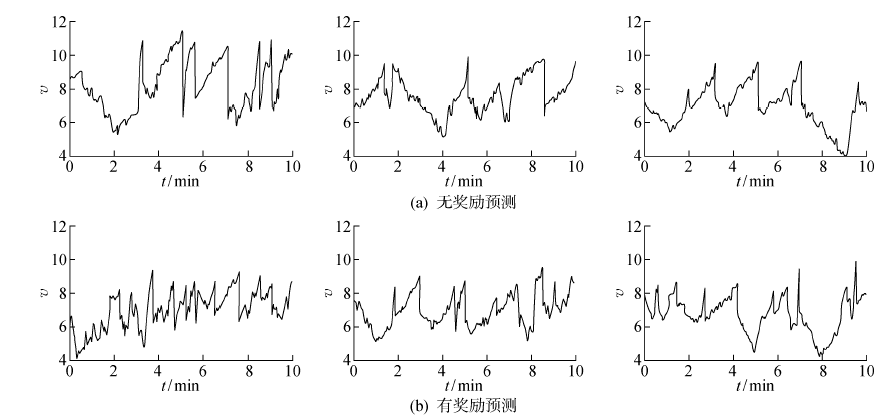
图13
单区域导航实验结果
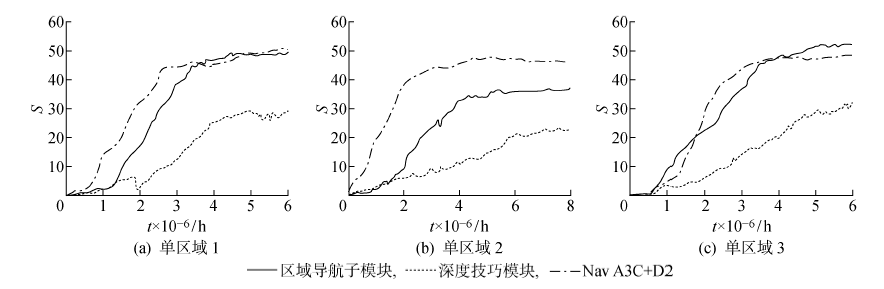
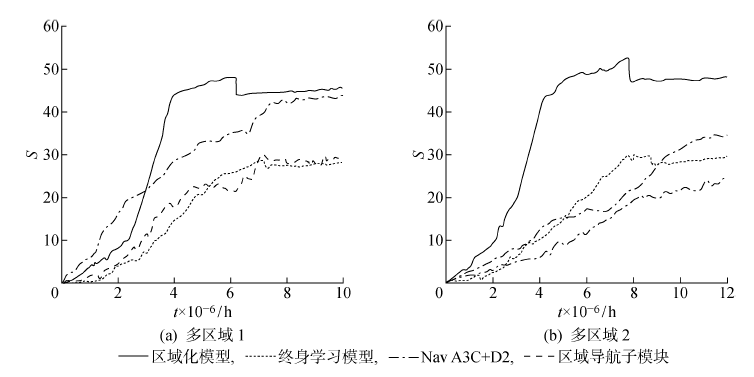
图14
多区域导航实验结果
| [1] | 徐德. 室内移动式服务机器人的感知、定位与控制[M]. 北京: 科学出版社, 2008. |
| XU De. Perception, positioning and control of indoor mobile service robot[M]. Beijing: Science Press, 2008. | |
| [2] |
STEFFENACH H A, WITTER M, MOSER M B, et al. Spatial memory in the rat requires the dorsola-teral band of the entorhinal cortex[J]. Neuron, 2005, 45(2):301-313.
doi: 10.1016/j.neuron.2004.12.044 URL |
| [3] | ARULKUMARAN K, DEISENROTH M, BRUNDAGE M, et al. A brief survey of deep reinforcement learning, (2017-09-28)[2019-08-20]. https://arxiv.org/pdf/1708.05866.pdf |
| [4] | MIROWSKI P, PASCANU R, VIOLA F, et al. Learning to navigate in complex environments,(2017-01-13)[2019-08-13]. https://arxiv.org/pdf/1611.03673.pdf |
| [5] | ZHU Y, MOTTAGHI P, KOLVE E, et al. Target-driven visual navigation in indoor scenes using deep reinforcement learning [C]//IEEE International Conference on Robotics and Automation. Singapore: IEEE, 2017, 3357-3364. |
| [6] | JADERBERG M, MNIH V, CZARNECKI W M, et al. Reinforcement learning with unsupervised auxiliary tasks[EB/OL]. (2016-11-16)[2019-04-20]. https://arxiv.org/pdf/1611.05397.pdf |
| [7] | OH J, CHOCKALINGAM V, SATINDER P, et al. Control of memory, active perception, and action in minecraft[EB/OL]. (2016-05-30)[2019-05-07]. https://arxiv.org/pdf/1605.09128.pdf |
| [8] | 黄健, 严胜刚. 基于区域划分自适应粒子群优化的超短基线定位算法[J]. 控制与决策, 2019, 9(34):2023-2030. |
| HUANG Jian, YAN Shenggang. Ultra-short baseline positioning algorithm based on region-division adaptive particle swarm optimization[J]. Control and Decision, 2019, 9(34):2023-2030. | |
| [9] | 张俊, 田慧敏. 一种基于边指针搜索及区域划分的三角剖分算法[J]. 自动化学报, 2021, 47(1):100-107. |
| ZHANG Jun, TIAN Huimin. A triangulation algorithm based on edge-pointer search and region-division[J]. Acta Automatica Sinica, 2021, 47(1):100-107. | |
| [10] |
RUAN X G, REN D Q, ZHU X Q, et al. Optimized data association based on Gaussian mixture model[J]. IEEE Access, 2020, 8:2590-2598.
doi: 10.1109/Access.6287639 URL |
| [11] | 朱续涛, 何晓斌, 刘悦, 等. 一种简易的脑片图像的半自动区域划分及细胞计数方法[J]. 波谱学杂志, 2018, 2(35):133-140. |
| ZHU Xutao, HE Xiaobin, LIU Yue, et al. A Convenient semi-automatic method for analyzing brain sections: Registration, segmentation and cell counting[J]. Chinese Journal of Magnetic Resonance, 2018, 2(35):133-140. | |
| [12] | KULKARNI T D, SAEEDI A, GAUTAM S, et al. Deep successor reinforcement learning, (2016-06-08)[2019-05-21]. https://arxiv.org/pdf/1606.02396.pdf |
| [13] |
MNIH V, KAVUKCUOGLU K, SILVER D, et al. Human-level control through deep reinforcement learning[J]. Nature, 2015, 518(7540):529-533.
doi: 10.1038/nature14236 URL |
| [14] | SHIH H H, SHAO H C, PING T W, et al. Distributed deep reinforcement learning based indoor visual navigation [C]//2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Madrid, Spain: IEEE, 2018: 2531-2537. |
| [15] | TESSLER C, GIVONY S, ZAHAVY T, et al. A deep hierarchical approach to lifelong learning in minecraft, (2016-11-30)[2019-06-05]. https://arxiv.org/pdf/1604.07255.pdf |
| [16] | HAUSKNECHT M, STONE P. Deep recurrent Q-learning for partially observable MDPs[EB/OL].(2017-01-11)[2019-05-17]. https://arxiv.org/pdf/1507.06527.pdf |
| [17] | RIEDMILLER M. Neural fitted Q iteration—First experiences with a data efficient neural reinforcement learning method [C]//16th European Conference on Machine Learning. Berlin, Germany: Springer-Verlag, 2005: 279-292. |
| [18] | LANGE S, RIEDMILLER M, VOIGTLANDER A. Autonomous reinforcement learning on raw visual input data in a real world application [C]//The 2012 International Joint Conference on Neural Networks. Brisbane, Australia: IEEE, 2012: 1-8. |
| [19] | GU S X, LILLICRAP T, SUTSKEVER I, et al. Continuous Deep Q-learning with model-based acceleration [C]//33rd International Conference on Machine Learning. USA: International Machine Learning Society, 2016: 4135-4148. |
| [20] |
KAELBLING L P, LITTMAN M L, CASSANDRA A R. Planning and acting in partially observable stochastic domains[J]. Artificial Intelligence, 1998, 101(1/2):99-134.
doi: 10.1016/S0004-3702(98)00023-X URL |
| [21] |
HOCHREITER S, SCHMIDHUBER J. Long short-term memory[J]. Neural Computation, 1997, 9(8):1735-1780.
doi: 10.1162/neco.1997.9.8.1735 URL |
| [22] | BEATTIE C, LEIBO J Z, TEPLYASHIN D, et al. Deepmind lab, (2016-12-13)[2018-12-30]. https://arxiv.org/pdf/1612.03801.pdf |
| [23] |
GERS F A, SCHMIDHUBER J, CUMMINS F. Learning to forget: Continual prediction with LSTM[J]. Neural Computation, 2000, 12(10):2451-2471.
doi: 10.1162/089976600300015015 URL |
| [24] | MNIH V, BADIA A P, MIRZA M, et al. Asynchronous method for deep reinforcement learning [C]//33rd International Conference on Machine Learning. USA: International Machine Learning Society, 2016: 2850-2869. |
| [25] | LEI T, MING L. Towards cognitive exploration through deep reinforcement learning for mobile robots [EB/OL]. (2016-10-06)[2019-06-12]. https://arxiv.org/pdf/1610.01733.pdf |
| [1] | 周毅, 周良才, 丁佳立, 高佳宁. 基于深度强化学习的电网拓扑优化及潮流控制[J]. 上海交通大学学报, 2021, 55(S2): 7-14. |
| 阅读次数 | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
全文 806
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
摘要 1214
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||