上海交通大学学报 ›› 2021, Vol. 55 ›› Issue (5): 566-574.doi: 10.16183/j.cnki.jsjtu.2020.092
所属专题: 《上海交通大学学报》2021年12期专题汇总专辑; 《上海交通大学学报》2021年“自动化技术、计算机技术”专题
雷静桃( ), 张悦文, 戴臻豪, 徐子力
), 张悦文, 戴臻豪, 徐子力
收稿日期:2020-04-03
出版日期:2021-05-28
发布日期:2021-06-01
作者简介:雷静桃(1970-),女,河南省洛阳市人,教授,博士生导师,现主要从事仿生机器人技术研究.电话(Tel.):13918337872;E-mail: 基金资助:
LEI Jingtao(), ZHANG Yuewen, DAI Zhenhao, XU Zili
Received:2020-04-03
Online:2021-05-28
Published:2021-06-01
摘要:
开展气动肌纤维静态特性建模与实验研究,综合考虑气动肌纤维端部变形、摩擦力、死区气压等对其静态特性的影响,提出一种气动肌纤维静态特性数学模型.搭建气动肌纤维静态特性实验平台,开展气动肌纤维及气动肌纤维束静态特性等长实验、等张实验及等压实验,对比分析不同规格参数的气动肌纤维及气动肌纤维束的静态特性.基于实验所得的等压特性曲线,提出一种气动肌纤维束实验模型,由大量实验数据辨识获得符合实际情况的气动肌纤维及气动肌纤维束的静态特性数学模型,为气动肌纤维驱动微型仿生机器人的精准控制奠定基础.
中图分类号:
雷静桃, 张悦文, 戴臻豪, 徐子力. 仿生气动肌纤维静态特性建模与实验研究[J]. 上海交通大学学报, 2021, 55(5): 566-574.
LEI Jingtao, ZHANG Yuewen, DAI Zhenhao, XU Zili. Modeling and Experimental Study on Static Characteristics of Bionic Pneumatic Muscle Fiber[J]. Journal of Shanghai Jiao Tong University, 2021, 55(5): 566-574.
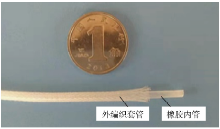
图1
PMF实物图
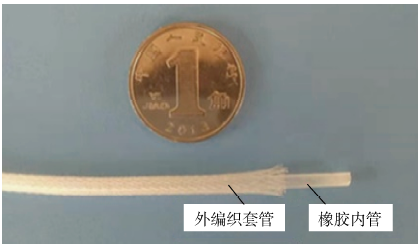
表1
PMF的结构参数
| 参数 | 取值 |
|---|---|
| 气动肌纤维外径/mm | 2.60 |
| 橡胶管外径/mm | 2.00 |
| 橡胶管内径/mm | 1.28 |
| 外套管纤维数量/根 | 32 |
| 外套管纤维直径/mm | 0.16 |
| 外套管编织角/(°) | 17~18 |
| 最大收缩力/N | 27~29 |
| 最大收缩率/% | 29 |
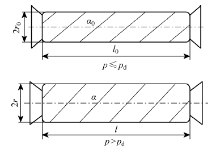
图2
PMF的充气状态示意图
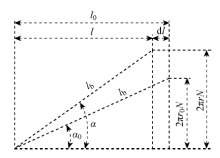
图3
PMF的几何参数关系示意图
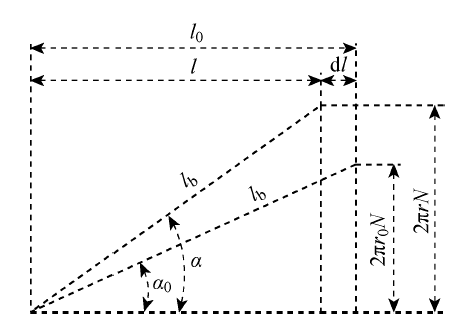
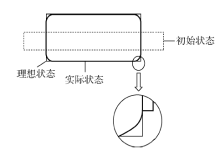
图4
PMF端部变形示意图
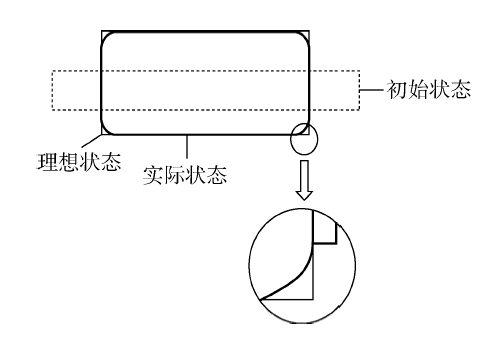
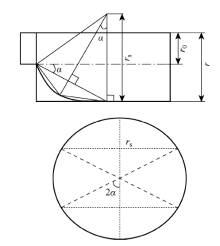
图5
端部变形几何关系示意图
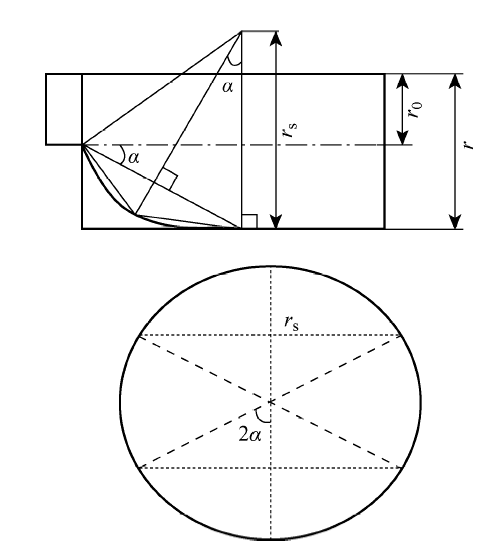
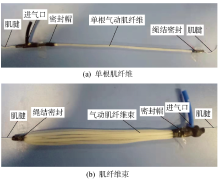
图6
SPMF与PMFB示意图

表2
SPMF与PMFB规格参数
| SPMF | PMFB | ||
|---|---|---|---|
| l0/mm | l0/mm | n | |
| 120 | 120 | 6 | |
| 200 | 120 | 8 | |
| 300 | 120 | 10 | |
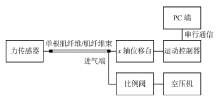
图7
实验系统图
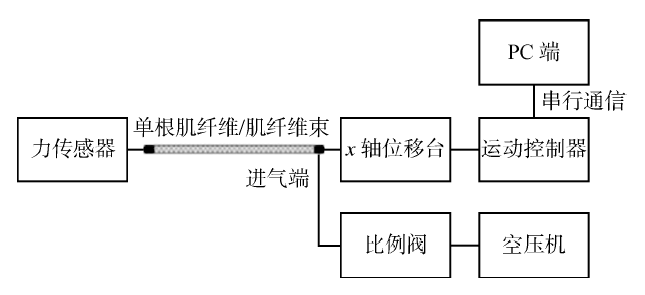
图8
实验平台
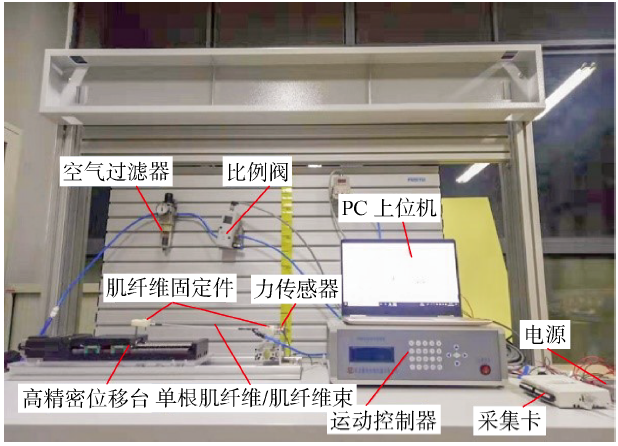
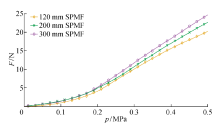
图9
不同初始长度下,SPMF的F随p的变化
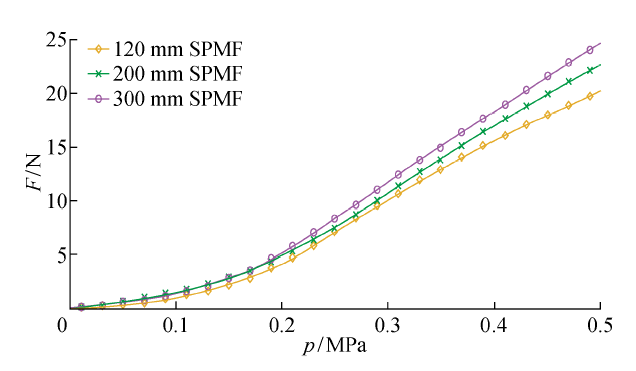
图10
不同肌纤维数下,FB随p的变化
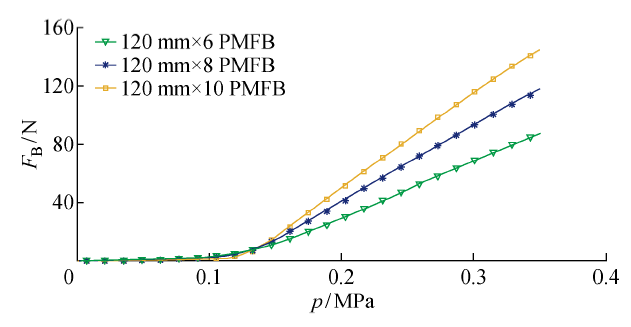
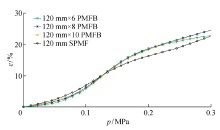
图11
不同肌纤维数的PMFB及SPMF的ε随p的变化


图12
初始长度为120mm的SPMF等压特性曲线

图13
120mm×6PMFB的等压特性曲线
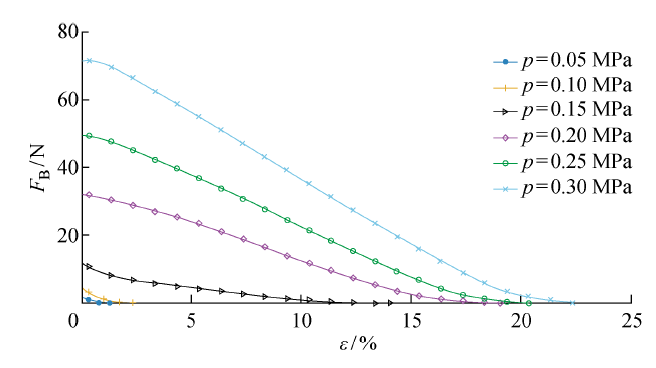
图14
120mm×8PMFB的等压特性曲线
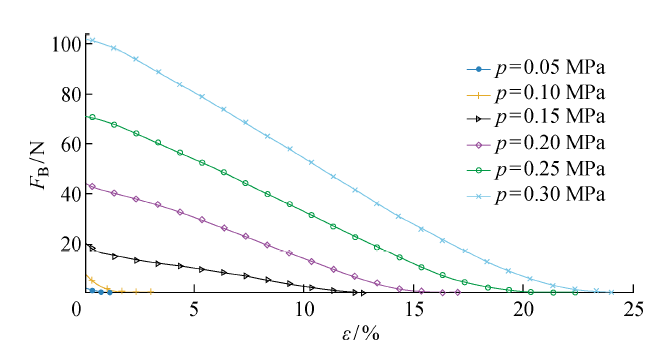
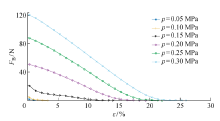
图15
120mm×10PMFB的等压特性曲线

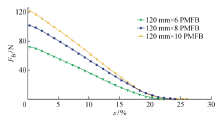
图16
在初始长度和气压相同的情况下,不同肌纤维数的PMFB的等压特性曲线
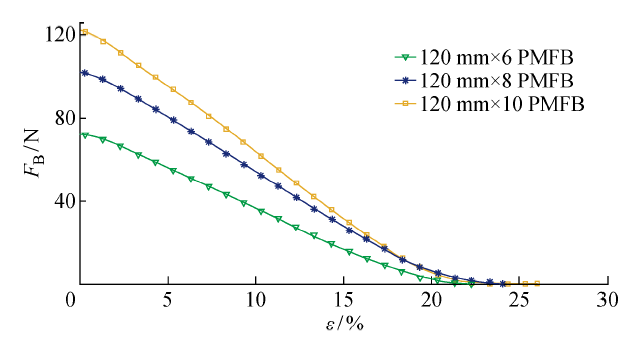
表3
不同肌纤维数下的多项式系数拟合结果
| n | τ | φ | ω |
|---|---|---|---|
| 6 | -0.141 | 7.092 | 0.592 |
| 8 | -0.255 | 10.580 | 2.248 |
| 10 | -0.294 | 12.540 | 1.720 |
表4
τ,φ,ω的相关系数拟合结果
| 相关系数 | τ(i=1) | φ(i=2) | ω(i=3) |
|---|---|---|---|
| di | 0.0092 | -0.191 | -0.2731 |
| ei | -0.1854 | 4.418 | 4.6510 |
| fi | 0.6395 | -12.540 | -17.4900 |

图17
PMF模型计算值与Schulte模型计算值及等压实验测量值对比
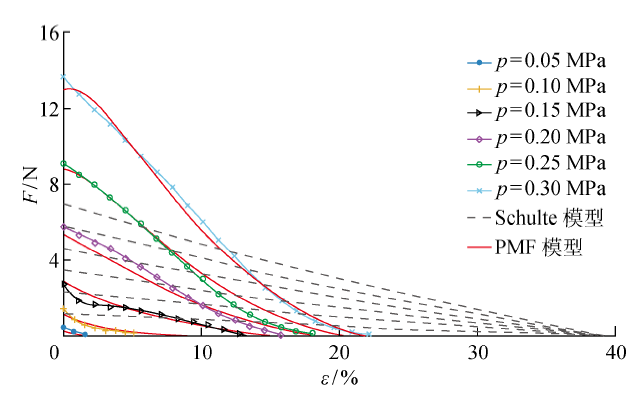
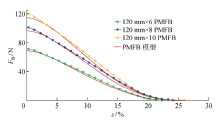
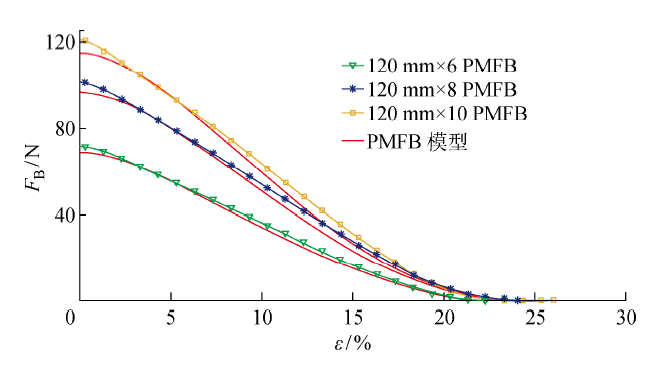
图18
初始长度相同,肌纤维数不同的PMFB模型计算值与实验测量值对比
| [1] | 张远深, 刘明春, 赵娜, 等. McKibben气动人工肌肉技术的发展历程[J]. 液压与气动, 2008(7):13-15. |
| ZHANG Yuanshen, LIU Mingchun, ZHAO Na, et al. The course of the development of McKibben pneumatic artificial muscles[J]. Chinese Hydraulics & Pneumatics, 2008(7):13-15. | |
| [2] |
KURUMAYA S, NABAE H, ENDO G, et al. Design of thin McKibben muscle and multifilament structure[J]. Sensors and Actuators A: Physical, 2017, 261:66-74.
doi: 10.1016/j.sna.2017.04.047 URL |
| [3] | 南卓江, 杨扬, 铃森康一, 等. 基于细径McKibben型气动人工肌肉的仿生手研发[J]. 机器人, 2018, 40(3):321-328. |
| NAN Zhuojiang, YANG Yang, SUZUMORI Koichi, et al. Development of a bionic hand actuated by thin McKibben pneumatic artificial muscle[J]. Robot, 2018, 40(3):321-328. | |
| [4] |
KURUMAYA S, SUZUMORI K, NABAE H, et al. Musculoskeletal lower-limb robot driven by multifilament muscles[J]. ROBOMECH Journal, 2016, 3(1):1-15.
doi: 10.1186/s40648-016-0041-7 URL |
| [5] | 谢胜龙, 梅江平, 刘海涛. McKibben型气动人工肌肉研究进展与趋势[J]. 计算机集成制造系统, 2018, 24(5):1065-1080. |
| XIE Shenglong, MEI Jiangping, LIU Haitao. Achievements and trends of research on McKibben pneumatic artificial muscles[J]. Computer Integrated Manufacturing Systems, 2018, 24(5):1065-1080. | |
| [6] | DE VOLDER M, CEYSSENS F, REYNAERTS D, et al. Design and characterisation of a hydraulic microactuator fabricated by lithography [C]//2009 IEEE 22nd International Conference on Micro Electro Mechanical Systems. Piscataway, NJ, USA: IEEE, 2009: 451-454. |
| [7] |
MOHD FAUDZI A A, ENDO G, KURUMAYA S, et al. Long-legged hexapod Giacometti robot using thin soft McKibben actuator[J]. IEEE Robotics and Automation Letters, 2018, 3(1):100-107.
doi: 10.1109/LRA.2017.2734244 URL |
| [8] | CHOU C P, HANNAFORD B. Static and dynamic characteristics of McKibben pneumatic artificial muscles [C]//Proceedings of the 1994 IEEE International Conference on Robotics and Automation. Piscataway, NJ, USA: IEEE, 1994: 281-286. |
| [9] |
KAGAWA T, FUJITA T, YAMANAKA T. Nonlinear model of artifical muscle[J]. Transactions of the Society of Instrument and Control Engineers, 1993, 29(10):1241-1243.
doi: 10.9746/sicetr1965.29.1241 URL |
| [10] | 郭振武, 黄继清, 王飞洋, 等. McKibben型气动肌肉模型改进与性能测试[J]. 中国机械工程, 2019, 30(19):2313-2318. |
| GUO Zhenwu, HUANG Jiqing, WANG Feiyang, et al. Improvement and performance testing of McKibben pneumatic muscle model[J]. China Mechanical Engineering, 2019, 30(19):2313-2318. | |
| [11] | 高建文, 梁全, 刘慧芳. 气动人工肌肉静态特性实验及模型仿真研究[J]. 机床与液压, 2019, 47(1):9-11. |
| GAO Jianwen, LIANG Quan, LIU Huifang. Static characteristic experiments and model simulation of pneumatic muscle actuator[J]. Machine Tool & Hydraulics, 2019, 47(1):9-11. | |
| [12] |
CHOU C P, HANNAFORD B. Measurement and modeling of McKibben pneumatic artificial muscles[J]. IEEE Transactions on Robotics and Automation, 1996, 12(1):90-102.
doi: 10.1109/70.481753 URL |
| [13] | TONDU B, LOPEZ P. Modeling and control of McKibben artificial muscle robot actuators[J]. IEEE Control Systems Magazine, 2000, 20(2):15-38. |
| [14] | AL-IBADI A, NEFTI-MEZIANI S, DAVIS S. Valuable experimental model of contraction pneumatic muscle actuator [C]//2016 21st International Conference on Methods and Models in Automation and Robotics (MMAR). Piscataway, NJ, USA: IEEE, 2016: 744-749. |
| [15] | 王琦珑, 王伟, 郝大贤, 等. 编织型气动人工肌肉迟滞现象建模与应用[J]. 机械工程学报, 2019, 55(21):73-80. |
| WANG Qilong, WANG Wei, HAO Daxian, et al. Hysteresis modeling and application of McKibben pneumatic artificial muscles[J]. Journal of Mechanical Engineering, 2019, 55(21):73-80. | |
| [16] | 傅晓云, 方敏, 李宝仁. 气动人工肌肉刚度特性的分析[J]. 机床与液压, 2007, 35(2):109-111. |
| FU Xiaoyun, FANG Min, LI Baoren. Theoretic analysis of stiffness characteristics of the pneumatic muscle actuator[J]. Machine Tool & Hydraulics, 2007, 35(2):109-111. |
| [1] | 文学栋, 贺国, 徐百汇. 船用柴油机减压阀静态特性建模及仿真[J]. 上海交通大学学报(自然版), 2011, 45(04): 481-485. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||