上海交通大学学报 ›› 2021, Vol. 55 ›› Issue (2): 111-116.doi: 10.16183/j.cnki.jsjtu.2020.005
所属专题: 《上海交通大学学报》2021年12期专题汇总专辑; 《上海交通大学学报》2021年“自动化技术、计算机技术”专题
• • 下一篇
刘佳鹏, 王江北, 丁烨, 费燕琼( )
)
收稿日期:2020-01-03
出版日期:2021-02-01
发布日期:2021-03-03
通讯作者:
费燕琼
E-mail:fyq@sjtu.edu.cn
作者简介:刘佳鹏(1996-),男,福建省泉州市人,硕士生,研究方向为软体机器人设计.
基金资助:
LIU Jiapeng, WANG Jiangbei, DING Ye, FEI Yanqiong()
Received:2020-01-03
Online:2021-02-01
Published:2021-03-03
Contact:
FEI Yanqiong
E-mail:fyq@sjtu.edu.cn
摘要:
设计了一种基于膨胀-收缩运动规则的晶格型自重构模块化软体机器人.机器人由多个软体模块组成,每个软体模块由呈正六面体构型的硅胶主体和主从对接面组成.软体模块内部的凸起设计使其具有良好的膨胀性能,主从对接面是由与硅胶主体螺纹连接的铁盘、吸盘式电磁铁组成.基于软体模块体积变化与内部压强的关系式,对软体模块的充气膨胀进行分析,建立了充气气压与软体模块膨胀量之间的映射关系,获得相邻两软体模块连接所需的充气气压.每个软体模块在工作气压为30 kPa的情况下能够膨胀1.5倍,使用电磁铁连接及软体模块的膨胀-收缩运动规则实现相邻两软体模块的对接与分离,多个相邻软体模块的依次对接和分离可以实现模块化软体机器人的自重构.通过软体机器人自重构实验验证机器人自重构的可行性.
中图分类号:
刘佳鹏, 王江北, 丁烨, 费燕琼. 晶格型模块化软体机器人自重构序列[J]. 上海交通大学学报, 2021, 55(2): 111-116.
LIU Jiapeng, WANG Jiangbei, DING Ye, FEI Yanqiong. Self-Reconfiguration Sequence of Lattice Modular Soft Robots[J]. Journal of Shanghai Jiao Tong University, 2021, 55(2): 111-116.
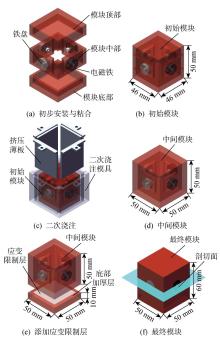
图1
软体模块的制作过程


图2
软体模块截面设计示意图
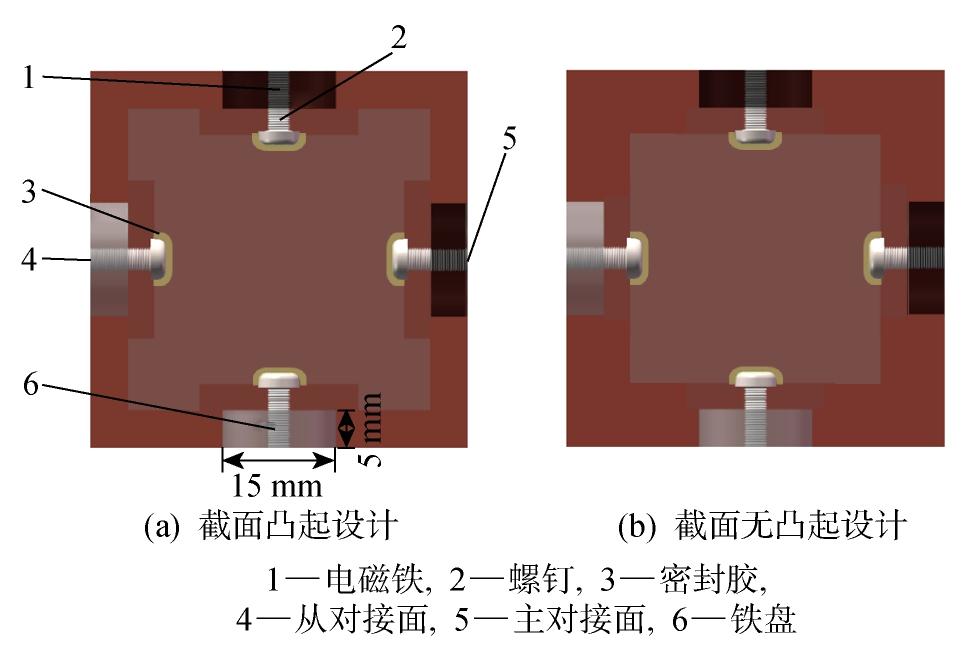
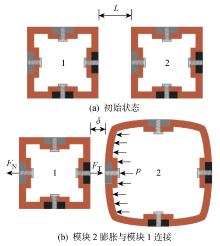
图3
软体模块间的连接示意图
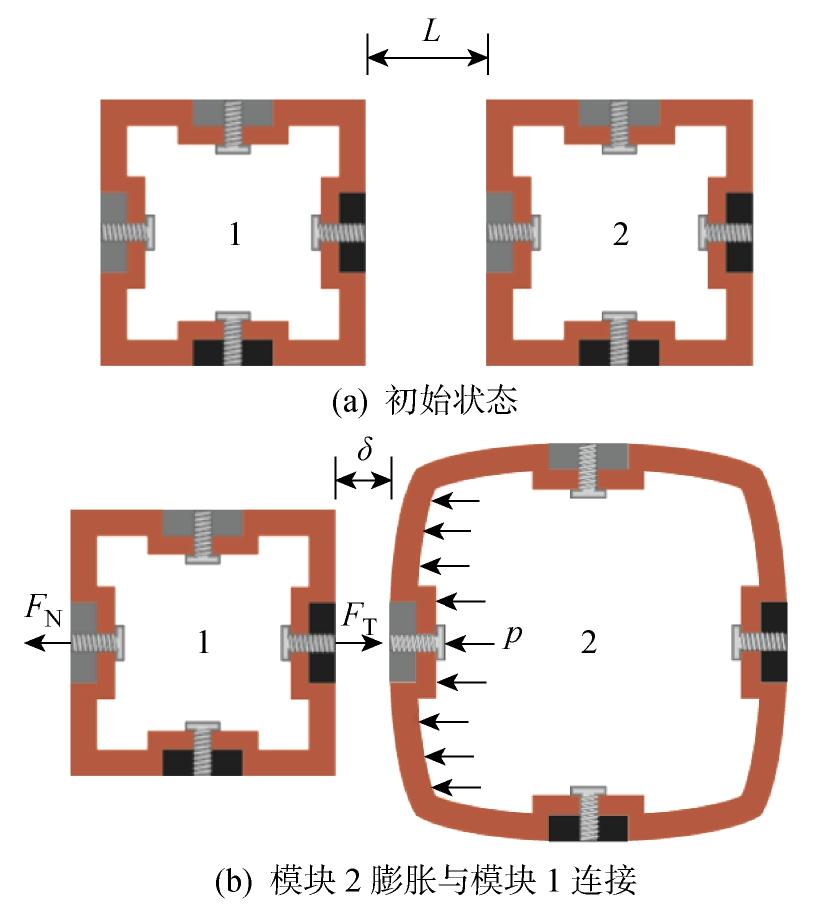
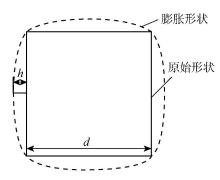
图4
软体模块2的膨胀形状变化示意图
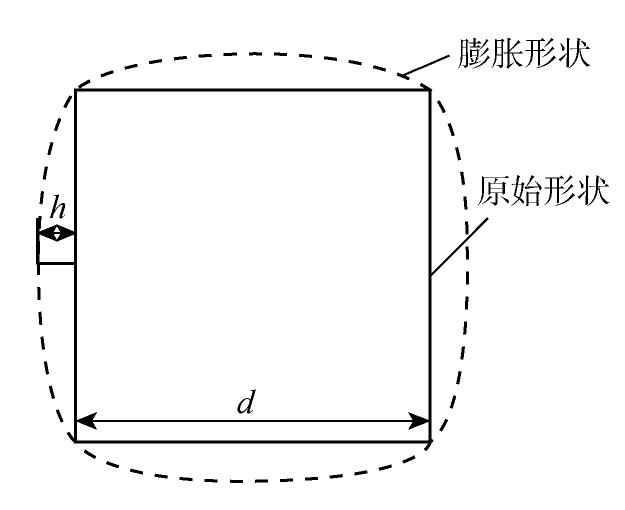
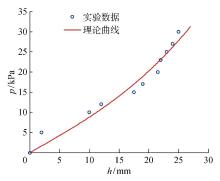
图5
p与h的关系
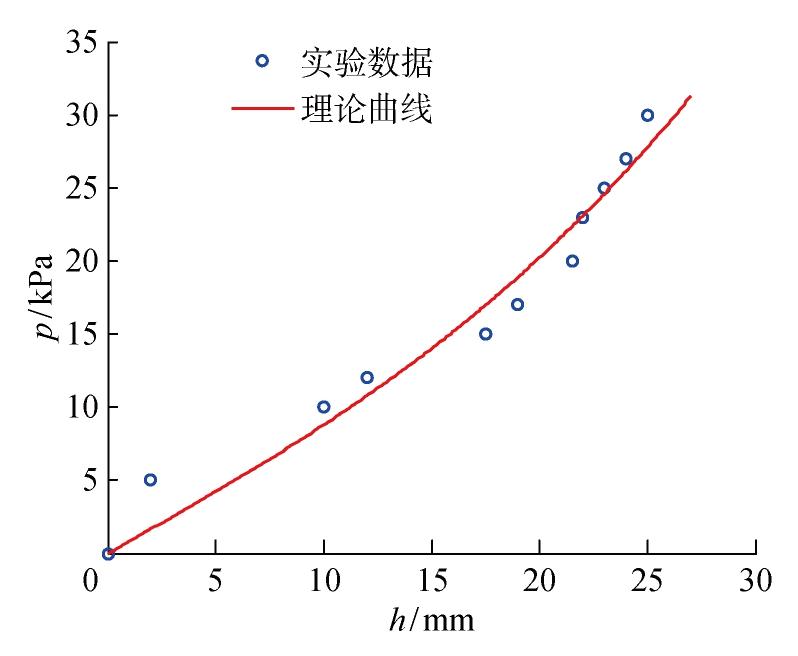
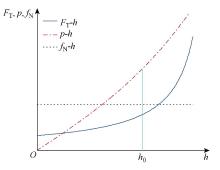
图6
软体模块的连接分析图
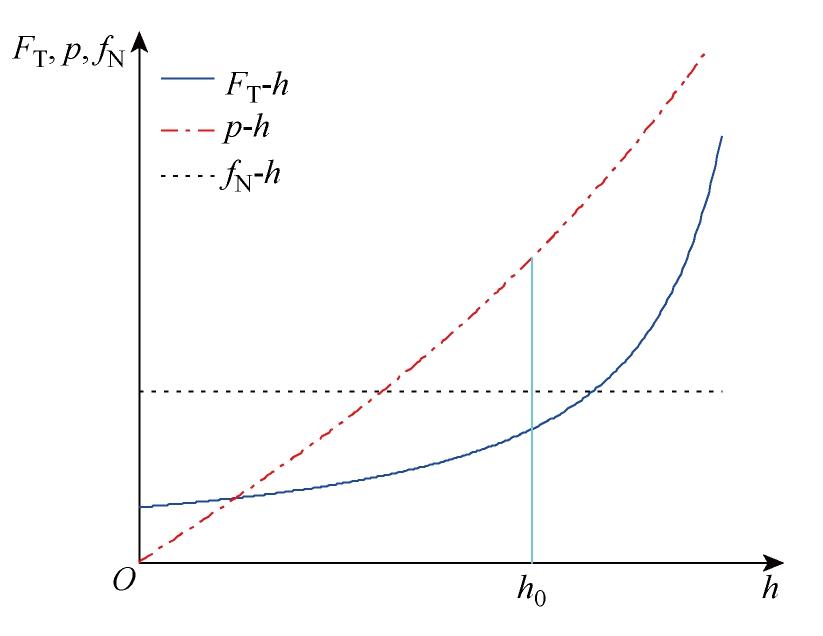
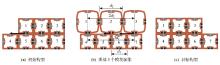
图7
软体机器人的自重构方法
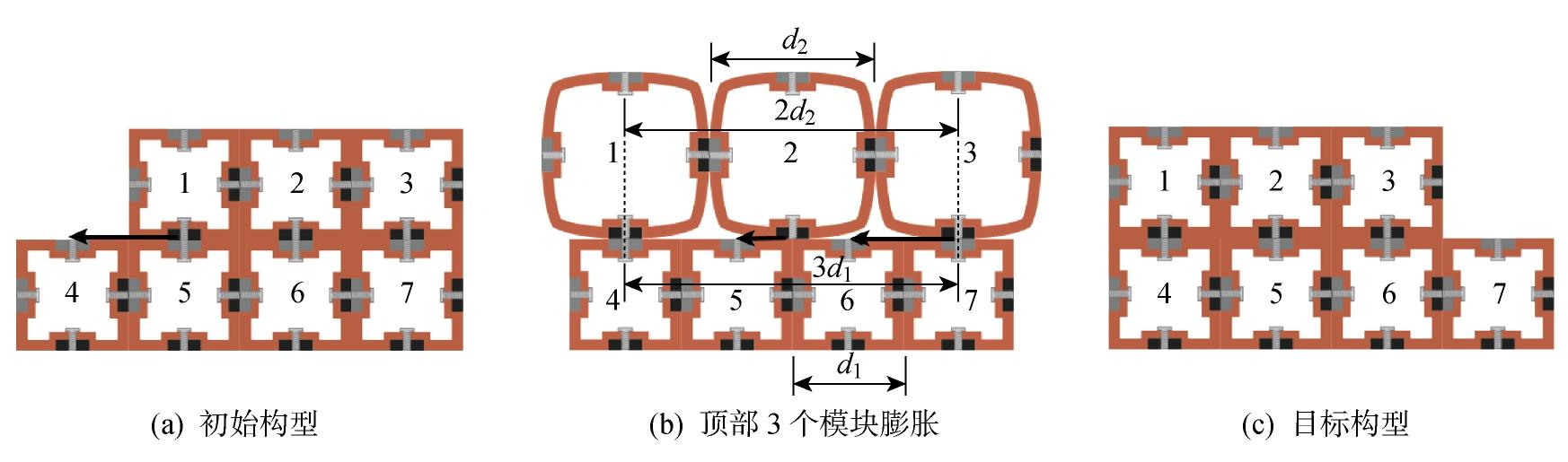
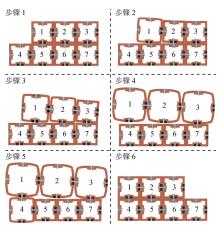
图8
软体机器人的自重构序列
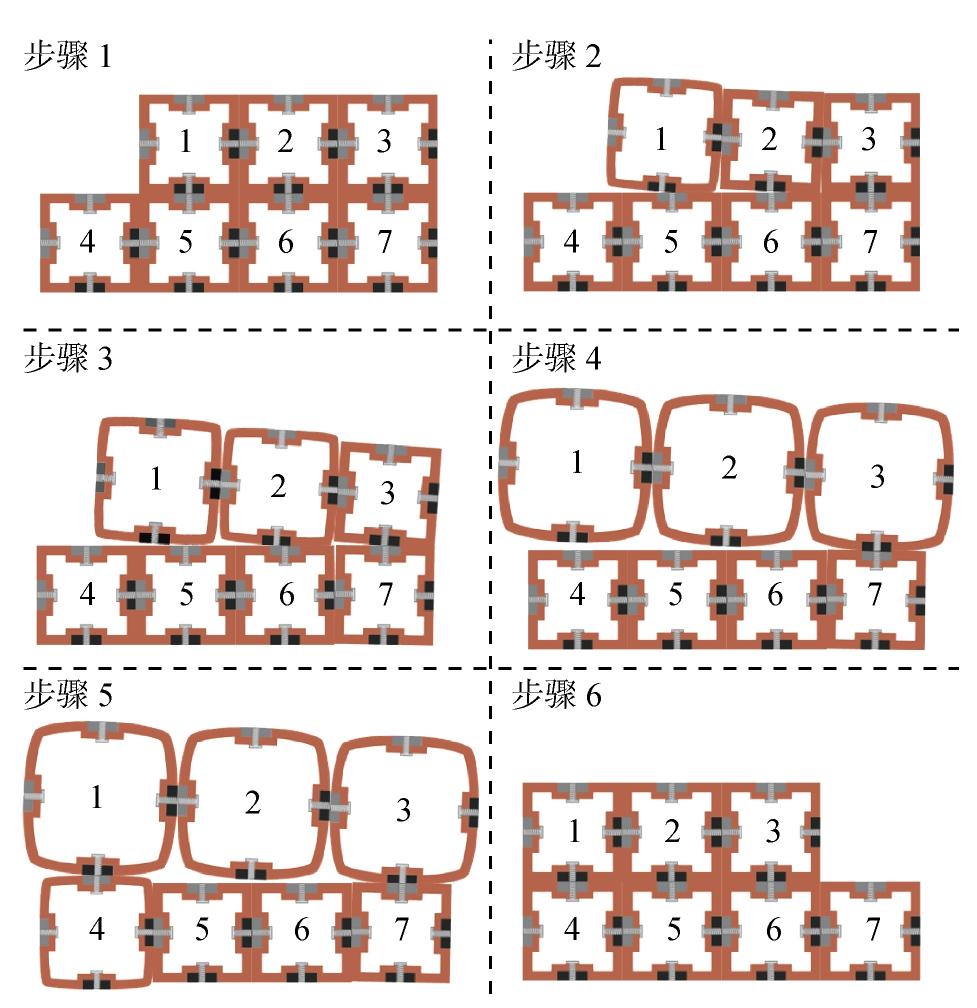

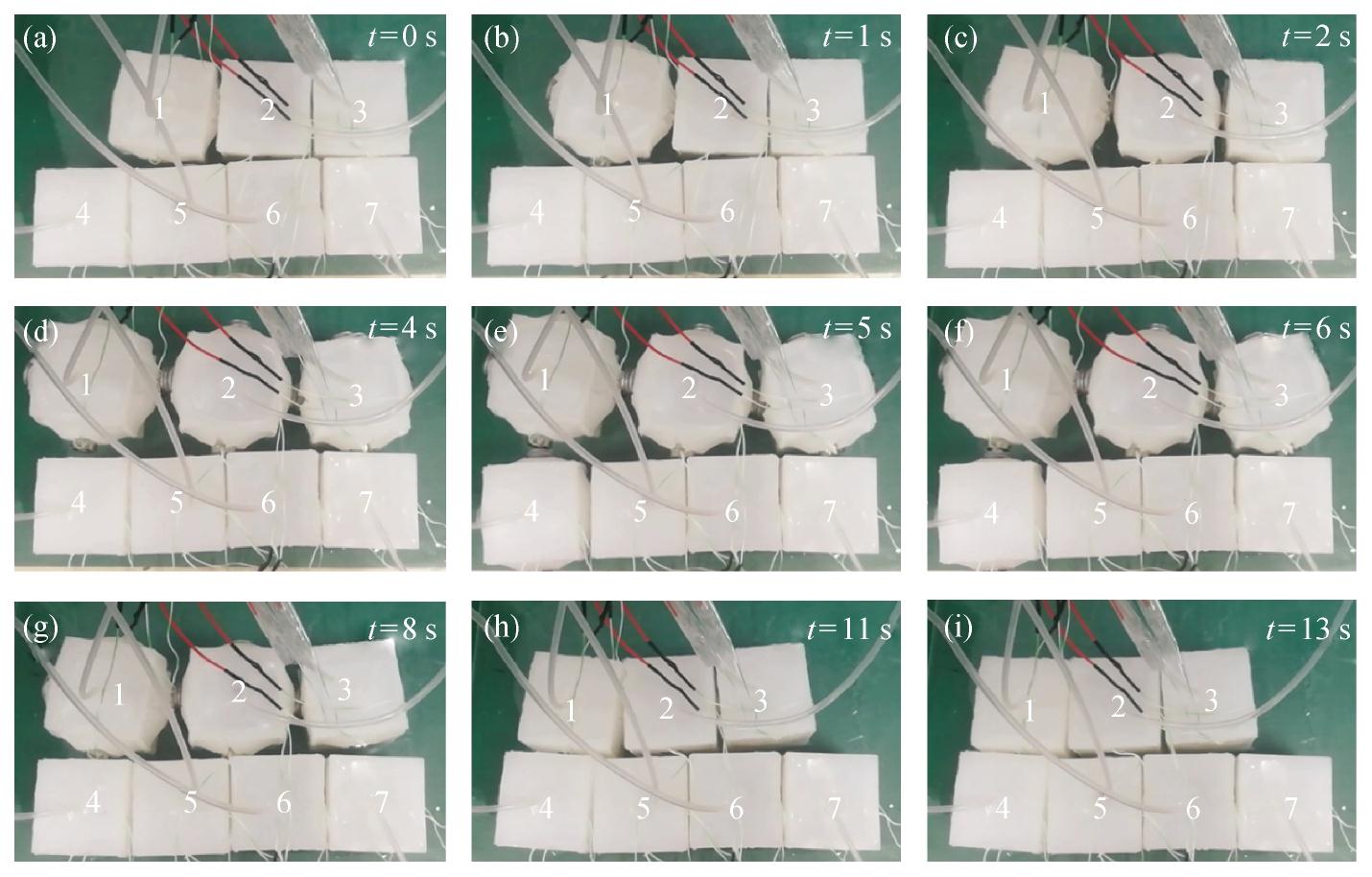
图9
软体机器人的自重构实验
| [1] | 侯涛刚,王田苗,苏浩鸿,等. 软体机器人前沿技术及应用热点[J]. 科技导报,2017, 35(18): 20-28. |
| HOU Taogang, WANG Tianmiao, SU Haohong, et al. Review on soft-bodied robots[J]. Science & Technology Review, 2017, 35(18): 20-28. | |
| [2] | 李卓雨. 软体机器人的发展应用与展望[J]. 科技传播,2018, 10(23): 109-110. |
| LI Zhuoyu. Development, application and prospect of soft robots[J]. Public Communication of Science & Technology, 2018, 10(23): 109-110. | |
| [3] | GERMANN J, DOMMER M, PERICET-CAMARA R, et al. Active connection mechanism for soft modular robots[J]. Advanced Robotics, 2012, 26(7): 785-798. |
| [4] | KWOK S W, MORIN S A, MOSADEGH B, et al. Magnetic assembly of soft robots with hard components[J]. Advanced Functional Materials, 2014, 24(15): 2180-2187. |
| [5] | NEMITZ M P, MIHAYLOV P, BARRACLOUGH T W, et al. Using voice coils to actuate modular soft robots: Wormbot, an example[J]. Soft Robotics, 2016, 3(4): 198-204. |
| [6] | VERGARA A, LAU Y S, MENDOZA-GARCIA R F, et al. Soft modular robotic cubes: Toward replicating morphogenetic movements of the embryo[J]. PLOS One, 2017, 12(1): 1-17. |
| [7] | ZOU J, LIN Y Q, JI C, et al. A reconfigurable omnidirectional soft robot based on caterpillar locomotion[J]. Soft Robotics, 2018, 5(2): 164-174. |
| [8] | 王羽麟. 可重构软体模块化机器人研制及其运动控制研究[D]. 哈尔滨: 哈尔滨工业大学,2018. |
| WANG Yulin. Development and motion control strategy research of soft reconfigurable modular robots[D]. Harbin: Harbin Institute of Technology, 2018. | |
| [9] | RUS D, VONA M. A physical implementation of the self-reconfiguring crystalline robot[C]∥IEEE International Conference on Robotics and Automation. Symposia Proceedings. Piscataway, NJ, USA: IEEE, 2000: 1726-1733. |
| [10] | 钱家骊. 电磁铁吸力公式的讨论[J]. 电工技术杂志,2001, 20(1): 59-60. |
| QIAN Jiali. Discussion on the suction formula of electromagnet[J]. Electrotechnical Journal, 2001, 20(1): 59-60. | |
| [11] | 陈安科. 线性电磁力控制系统试验和研究[D]. 重庆: 重庆大学,2012. |
| CHEN Anke. Research on the control system of linear electromagnetic force[D]. Chongqing: Chongqing University, 2012. |
| [1] | 马洲俊, 王勇, 王杰, 陈少宇. 柔性控制器MMC子模块最优冗余数量双重协同优化方法[J]. 上海交通大学学报, 2022, 56(3): 325-332. |
| [2] | 王宇轩, 刘朝雨, 王江北, 费燕琼. 具有多地形运动能力的双模块软体机器人[J]. 上海交通大学学报, 2022, 56(10): 1388-1396. |
| [3] | 李勇, 张梦骏, 仇栋, 范云锋, 苏智勇, 邱令存. 数据驱动的指控系统增强现实电子沙盘设计与开发[J]. 空天防御, 2021, 4(2): 27-. |
| [4] | 易灿明,余海东,王皓. 基于绝对节点坐标法的压电驱动复合结构动力学特性[J]. 上海交通大学学报, 2019, 53(6): 665-672. |
| [5] | 何云涛1,孔博2,3,奚小冰2,3,罗云1. 一种用于桡骨远端骨折的新型医用小夹板设计与评价[J]. 上海交通大学学报(自然版), 2018, 52(2): 194-199. |
| [6] | 奚鑫泽1,2,黄文焘3,邰能灵3. 大型光伏电站直流升压汇集接入系统建模与数字仿真[J]. 上海交通大学学报(自然版), 2018, 52(10): 1178-1188. |
| [7] | 王江北,方晔阳,童歆,张帅,费燕琼. 多气囊仿生软体机器人设计及其运动特性分析[J]. 上海交通大学学报(自然版), 2018, 52(1): 20-25. |
| [8] | 李元春1,宋扬2,赵博1,3. 环境约束可重构机械臂模块化力/位置控制[J]. 上海交通大学学报(自然版), 2017, 51(6): 709-714. |
| [9] | 钟芸, 刘媛媛. 电子与自动化实践新课程建设和探究[J]. 实验室研究与探索, 2017, 36(5): 170-173. |
| [10] | 孟成,苏明. 重型燃气轮机天然气供应系统整体性能仿真[J]. 上海交通大学学报(自然版), 2016, 50(04): 483-489. |
| [11] | 鲍文龙,余岳峰. 模块化螺杆膨胀发电机组转速控制模型[J]. 上海交通大学学报(自然版), 2016, 50(04): 521-527. |
| [12] | 费燕琼,吕海洋,沈星尧. 模块化软体机器人运动模式[J]. 上海交通大学学报(自然版), 2013, 47(12): 1870-1873. |
| [13] | 徐黎1, 庞瑞帆2, 3, 张怡1, 关新平4. 攻击直升飞机通信导航识别系统的分布式综合模块化航空电子设备综合技术研究[J]. 上海交通大学学报(自然版), 2012, 46(05): 756-761. |
| [14] | 周承1, 庞瑞帆2, 3, 卫保国1, 关新平4. 通用直升飞机通信导航识别系统的模块化综合技术研究[J]. 上海交通大学学报(自然版), 2012, 46(05): 762-767. |
| [15] | 费燕琼a, b, 朱越梁a, b, 宋立博a, b. 多模块式移动机器人系统的自组织协作行为[J]. 上海交通大学学报(自然版), 2011, 45(07): 990-994. |
| 阅读次数 | ||||||
|
全文 1190
|
|
|||||
|
摘要 |
|
|||||