上海交通大学学报 ›› 2021, Vol. 55 ›› Issue (11): 1493-1498.doi: 10.16183/j.cnki.jsjtu.2020.415
所属专题: 《上海交通大学学报》2021年12期专题汇总专辑; 《上海交通大学学报》2021年“自动化技术、计算机技术”专题
• 创新设计 • 上一篇
于特a, 王磊a,b( )
)
收稿日期:2020-12-11
出版日期:2021-11-28
发布日期:2021-12-03
通讯作者:
王磊
E-mail:wanglei@sjtu.edu.cn
作者简介:于 特(1995-),男,吉林省长春市人,硕士生,研究方向为无人船控制.
基金资助:
YU Tea, WANG Leia,b()
Received:2020-12-11
Online:2021-11-28
Published:2021-12-03
Contact:
WANG Lei
E-mail:wanglei@sjtu.edu.cn
摘要:
提出一种用于构建新型海上平台的方法.基于多无人船的协同控制实现自重构海上平台,该平台可以根据需求对接成不同形状,并设计旁靠控制器使得无人船进行旁靠对接;采用电磁和连接杆实现对接,同时降低对接难度.利用水池条件构建试验场地,并进行模型试验验证该自重构平台的功能.结果表明:同构的无人船设计使得任意无人船均可以实现对接.与单一海上平台相比,该自重构平台可以完成更复杂的任务,分散的去中心化设计使其更具灵活性和可靠性.
中图分类号:
于特, 王磊. 基于协同控制的自重构平台算法及试验验证[J]. 上海交通大学学报, 2021, 55(11): 1493-1498.
YU Te, WANG Lei. Algorithm and Experimental Verification of Self-Assembling Platform Based on Cooperative Control[J]. Journal of Shanghai Jiao Tong University, 2021, 55(11): 1493-1498.
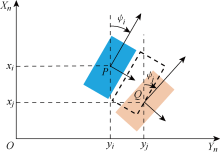
图1
大地坐标系与船体坐标系

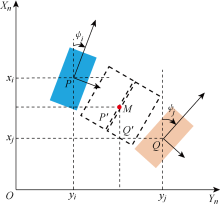
图2
动态参考点M
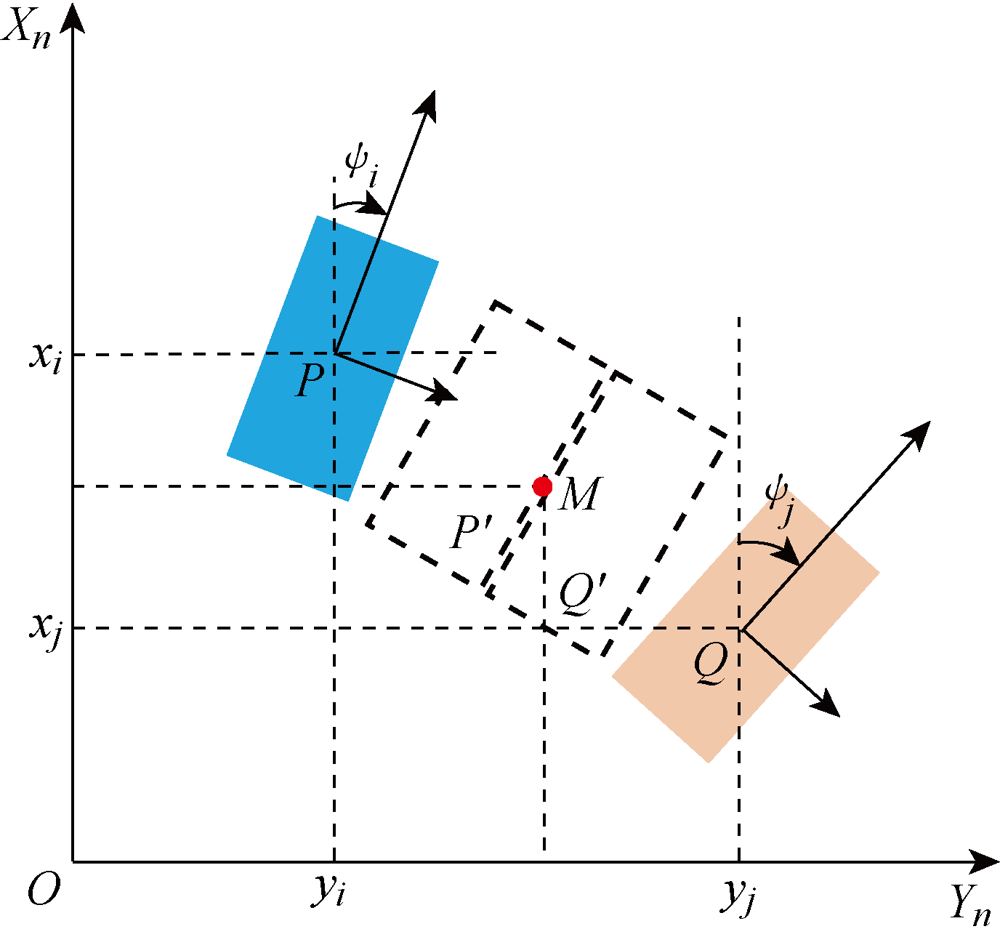

图3
推进器布置
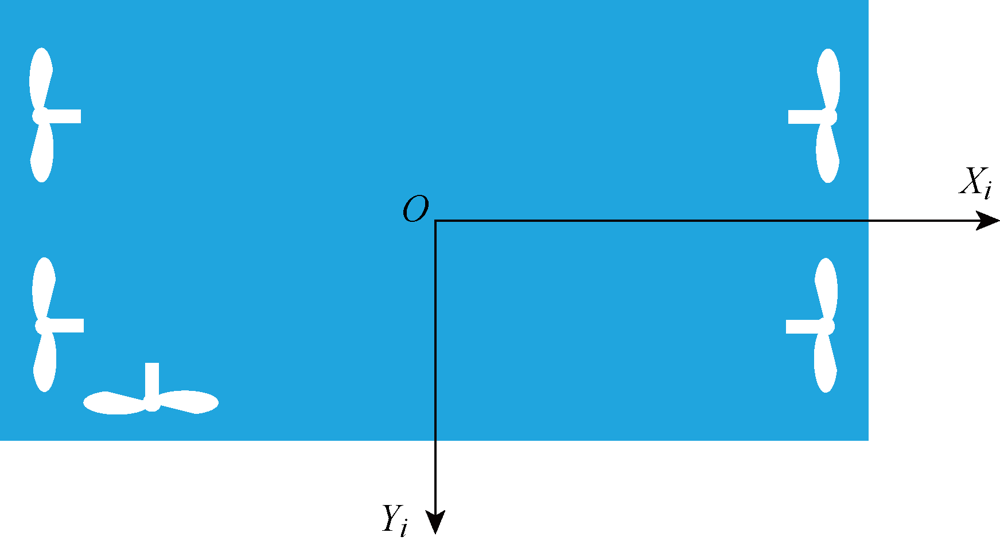

图4
子模块硬件布置
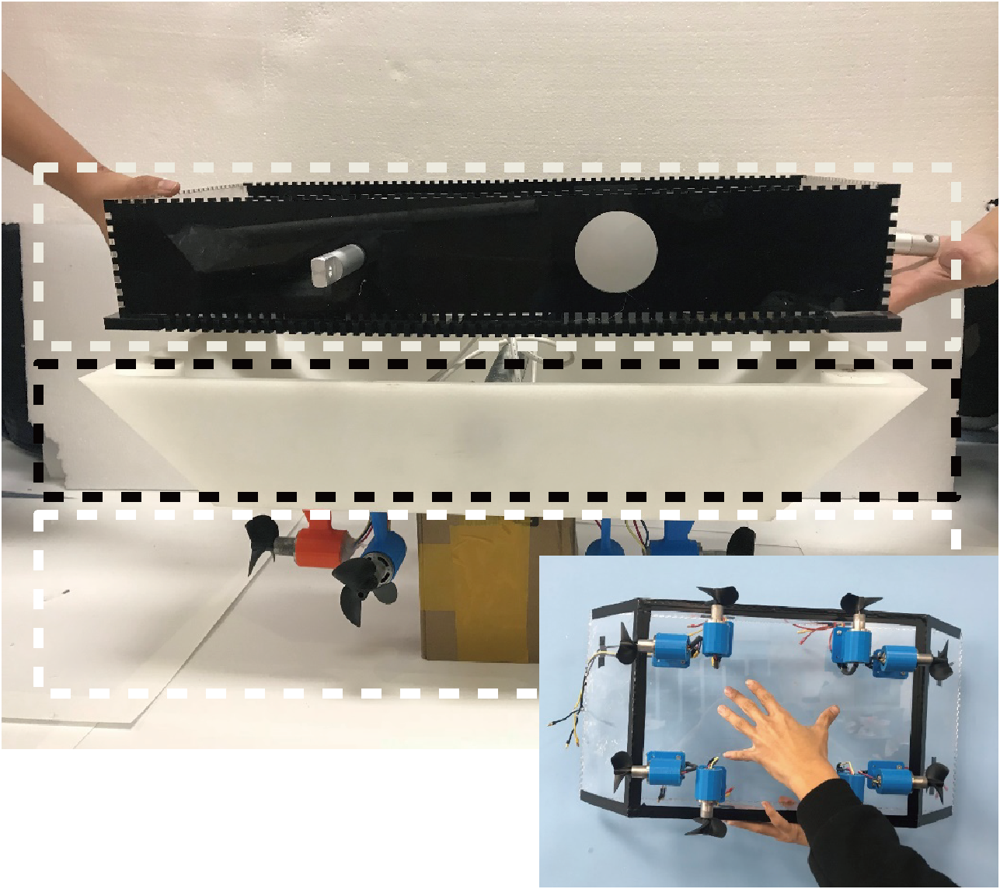
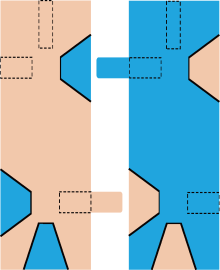
图5
对接示意图
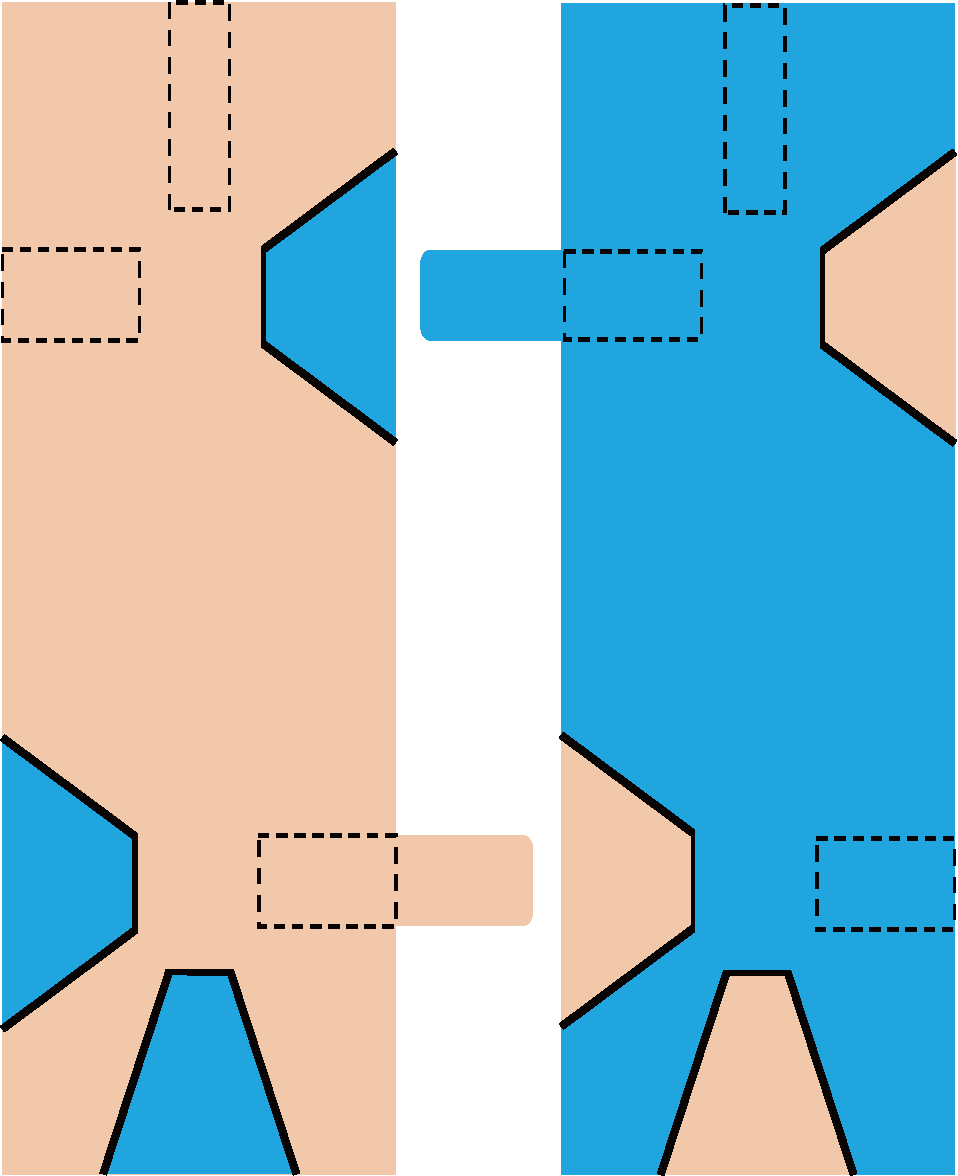

图6
对接完成
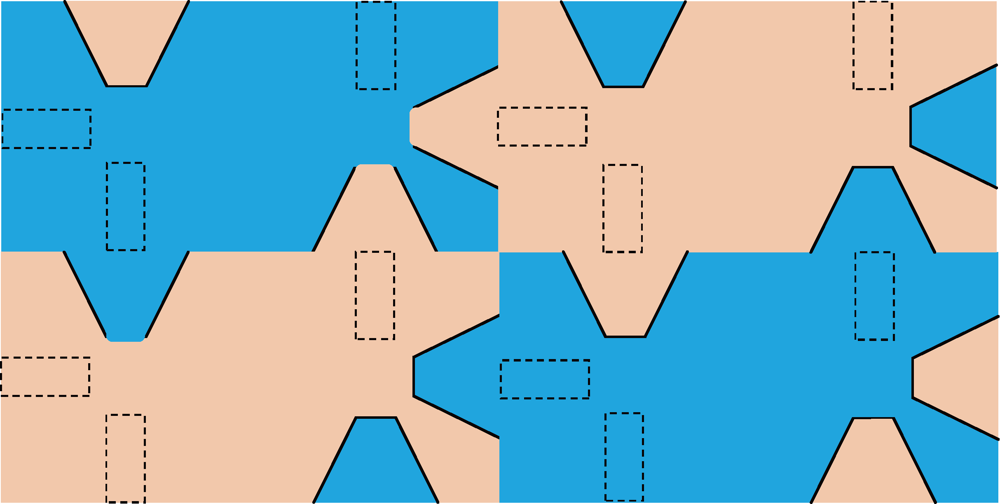

图7
子模块轨迹
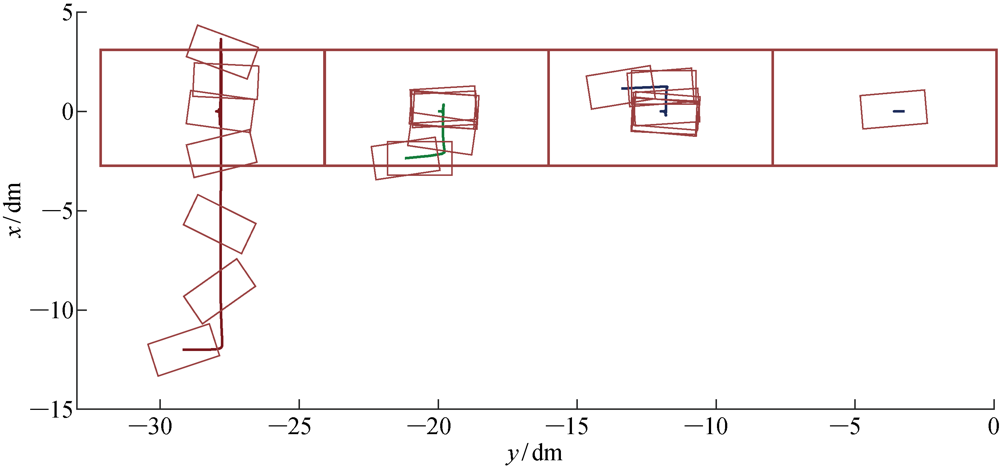

图8
子模块拼接过程
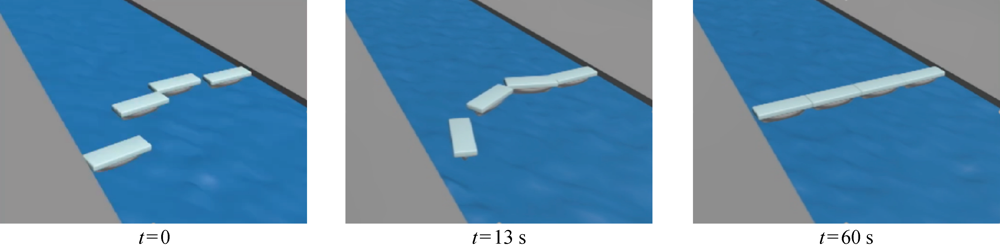

图9
子模块跟踪误差


图10
子模块自主对接
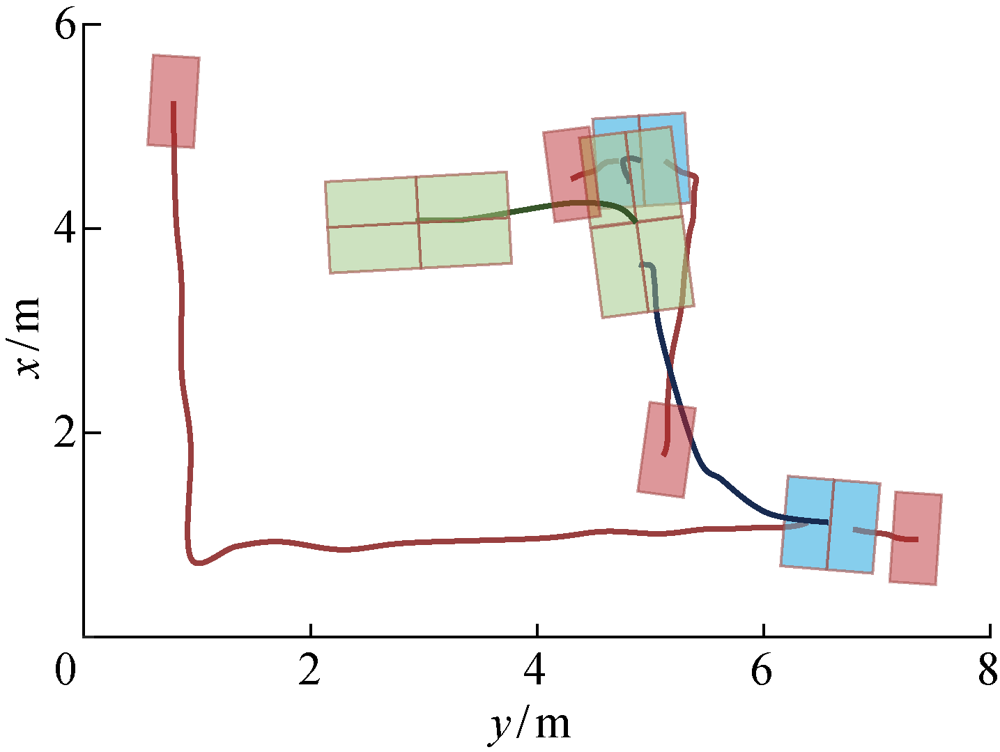

图11
试验模块拼接过程

| [1] | 杨振华, 冷沙. 管窥外军典型无人化作战装备[J]. 军事文摘, 2020(19):31-34. |
| YANG Zhenhua, LENG Sha. On typical unmanned combat equipment of foreign army[J]. Military Digest, 2020(19):31-34. | |
| [2] | 张伟, 廖煜雷, 姜峰, 等. 无人水面艇技术发展回顾与趋势分析[J]. 无人系统技术, 2019, 2(6):1-9. |
| ZHANG Wei, LIAO Yulei, JIANG Feng, et al. Development review and trend analysis of unmanned surface vehicles technology[J]. Unmanned Systems Technology, 2019, 2(6):1-9. | |
| [3] | 熊勇, 余嘉俊, 张加, 等. 无人艇研究进展及发展方向[J]. 船舶工程, 2020, 42(2):I0010-I0017. |
| XIONG Yong, YU Jiajun, ZHANG Jia, et al. Research progress and development direction of unmanned aerial vehicle[J]. Ship Engineering, 2020, 42(2):I0010-I0017. | |
| [4] | QUEIROZ FILHO A N, TANNURI E A. Experimental results of cooperative control applied to multi-vessel DP operations[C]// Proceedings of ASME 2013 32nd International Conference on Ocean, Offshore and Arctic Engineering. Nantes, France: ASME, 2013. |
| [5] | QUEIROZ FILHO A N, TANNURI E A. Cooperative control applied to DP systems-numerical analysis[J]. IFAC Proceedings Volumes, 2013, 46(33):268-273. |
| [6] | CONG P W, MAGEE A R, JAIMAN R, et al. Hydrodynamic analysis including shielding effects and advanced DP controls for improved uptime of a floatel connected to an FPSO by a gangway[C]// Proceedings of the Offshore Technology Conference Asia. Kuala Lumpur, Malaysia: Offshore Technology Conference, 2018. |
| [7] | FOSSEN T I. Handbook of marine craft hydrodynamics and motion control[M]. Hoboken, USA: Wiley, 2011. |
| [1] | 乔文超, 聂伟民, 杜选民, 刘本奇, 叶天明, 杨天霖. 用于圆周合成孔径声呐成像的无人船圆周运动精准控制方法[J]. 上海交通大学学报, 2026, 60(1): 154-162. |
| [2] | 张东, 于成龙. 某海上采油平台生产电加热器维修实践[J]. 海洋工程装备与技术, 2025, 12(2): 132-135. |
| [3] | 张宇. 自控系统在石油化工行业中的应用与维护[J]. 海洋工程装备与技术, 2025, 12(2): 88-91. |
| [4] | 李仪博, 周前, 朱丹丹, 姜亚峰, 吴秋伟, 陈健. 提高海上风电场主动频率支撑能力的控制策略[J]. 上海交通大学学报, 2025, 59(10): 1442-1450. |
| [5] | 何通, 韦亚利, 卢青, 毕千. 无人机群协同侦察多点目标路径规划与控制[J]. 空天防御, 2025, 8(1): 31-40. |
| [6] | 周毅, 周良才, 史迪, 赵小英, 闪鑫. 基于安全深度强化学习的电网有功频率协同优化控制[J]. 上海交通大学学报, 2024, 58(5): 682-692. |
| [7] | 金飞宇,陈龙胜,李统帅,石童昕. 高阶MIMO非线性多智能体系统分布式协同抗干扰控制[J]. J Shanghai Jiaotong Univ Sci, 2024, 29(4): 656-666. |
| [8] | 雍久钦1, 2, 薛镇涛1, 2, 陈俐1, 2. 海况对无人船直航循迹精度与控制耗能的影响研究[J]. 海洋工程装备与技术, 2024, 11(4): 103-109. |
| [9] | 李婷婷, 王晓智, 王爱武, 王 晶, 李夏玲. 固体绝缘开关柜在海上平台的技术应用及研究[J]. 海洋工程装备与技术, 2024, 11(4): 53-57. |
| [10] | 蔡君蕾, 姚天成, 刘宏, 万立健, 万军, 樊翔, 赵永生. 新型双体无人测量艇静水阻力性能预报与航态优化[J]. 上海交通大学学报, 2024, 58(2): 166-174. |
| [11] | 于特, 刘佳鹏, 吴超, 周畅, 周胜增, 王磊. 基于非线性干扰观测器的无人船与自主水下航行器协同运动控制策略[J]. 上海交通大学学报, 2023, 57(S1): 114-123. |
| [12] | 姚天成, 赵永生, 王红雨, 何炎平, 丁子龙, 池哲瀛, 蔡炜锴. 风光混合驱动长航程无人海空立体探测船研发[J]. 上海交通大学学报, 2021, 55(2): 215-220. |
| [13] | 刘佳鹏, 王江北, 丁烨, 费燕琼. 晶格型模块化软体机器人自重构序列[J]. 上海交通大学学报, 2021, 55(2): 111-116. |
| [14] | 李彪, 王立文, 邢志伟, 王思博, 罗谦. 飞机地面除冰资源协同控制[J]. 上海交通大学学报, 2021, 55(11): 1362-1370. |
| [15] | 姜晓明, 王旭烽, 张伟芳, 刘宜罡. 激光跟瞄系统粗精复合轴协同控制策略优化研究[J]. 空天防御, 2019, 2(3): 31-37. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||