上海交通大学学报 ›› 2024, Vol. 58 ›› Issue (2): 166-174.doi: 10.16183/j.cnki.jsjtu.2022.452
蔡君蕾1,2,3, 姚天成1,2,3, 刘宏4, 万立健4, 万军4, 樊翔5, 赵永生1,2,3( )
)
收稿日期:2022-11-07
修回日期:2022-12-31
接受日期:2023-02-13
出版日期:2024-02-28
发布日期:2024-03-04
通讯作者:
赵永生,研究员(双聘),博士生导师;E-mail:yongsheng@sjtu.edu.cn.
作者简介:蔡君蕾(1999-),硕士生,现主要从事无人船阻力和耐波性能研究.
基金资助:
CAI Junlei1,2,3, YAO Tiancheng1,2,3, LIU Hong4, WAN Lijian4, WAN Jun4, FAN Xiang5, ZHAO Yongsheng1,2,3()
Received:2022-11-07
Revised:2022-12-31
Accepted:2023-02-13
Online:2024-02-28
Published:2024-03-04
摘要:
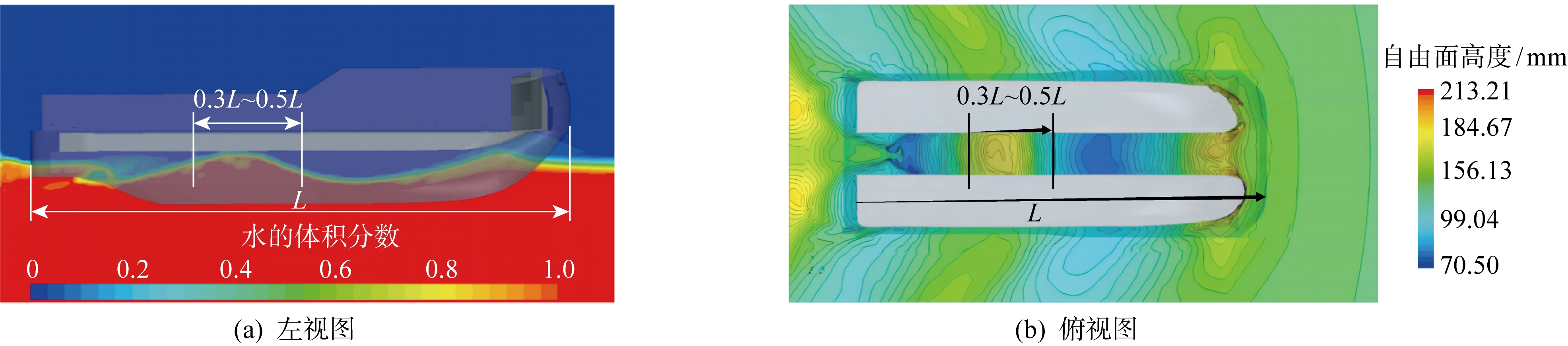
为得到一艘新型双体无人测量艇的阻力性能和经济航态,分别利用模型试验、经验公式和计算流体力学(CFD)方法对该艇进行阻力预报和阻力成分分析.运用CFD方法进一步探究工作航速下船体的不同重心纵向位置对船体阻力、纵倾和船周波形的影响,还为多波束声学设备选取了合适的船体安装位置.结果表明,CFD方法能精确完整地预报双体测量艇从低航速排水到高航速滑行的航态变化和阻力特性,而经验公式法主要适用于测量艇航速较低(FrΔ<1.5)时的阻力预报.在4~6 kn测量航速下,该艇的阻力经济航态约为尾倾1.4°,此时在片体间距离船尾约0.3~0.5个船长位置处存在一个相对稳定的高液位区域,适合作为无人测量艇多波束声学设备的安装位置.
中图分类号:
蔡君蕾, 姚天成, 刘宏, 万立健, 万军, 樊翔, 赵永生. 新型双体无人测量艇静水阻力性能预报与航态优化[J]. 上海交通大学学报, 2024, 58(2): 166-174.
CAI Junlei, YAO Tiancheng, LIU Hong, WAN Lijian, WAN Jun, FAN Xiang, ZHAO Yongsheng. Calm Water Resistance Prediction and Navigation Posture Optimization of a New Unmanned Survey Catamaran[J]. Journal of Shanghai Jiao Tong University, 2024, 58(2): 166-174.

图1
目标船外观效果

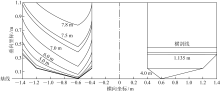
图2
目标船横剖面型线
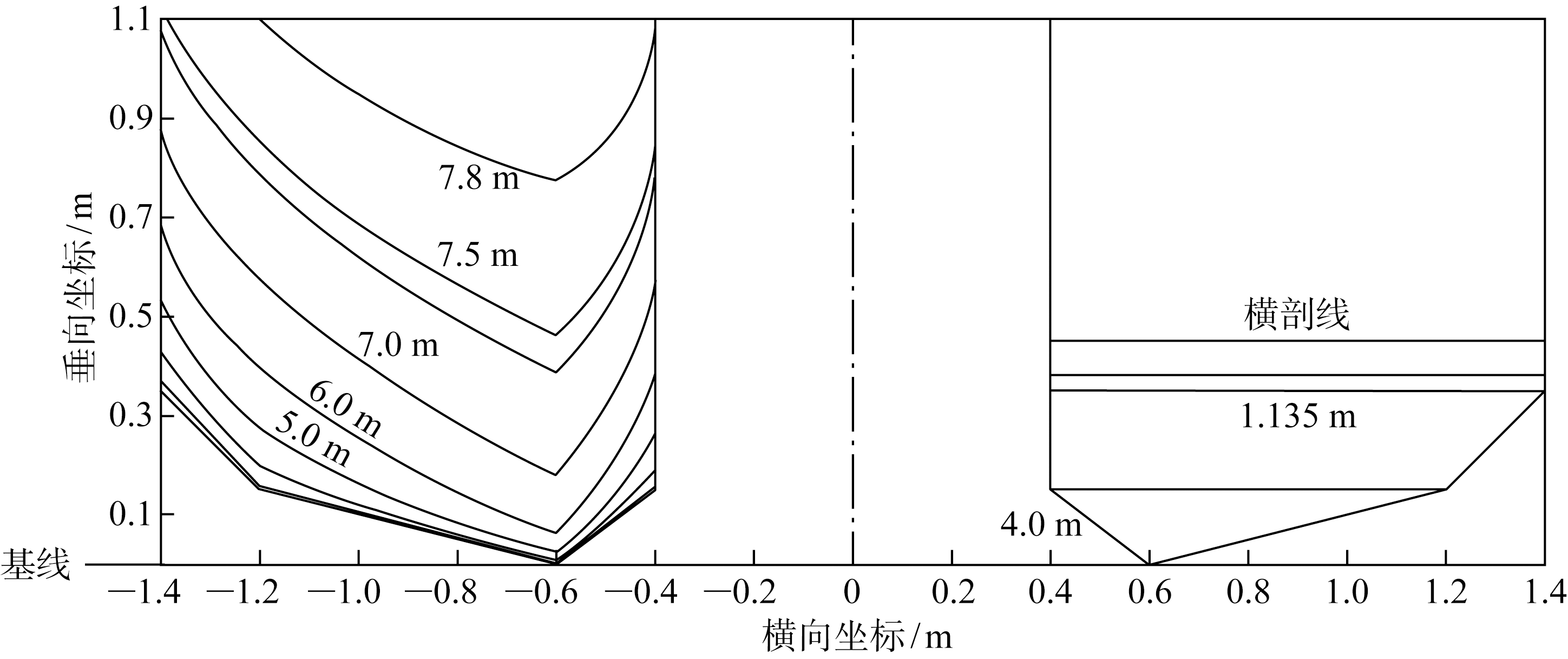
表1
主要设计参数
| 参数 | 实船值 | 船模值 |
|---|---|---|
| 船长,L/m | 8 | 2 |
| 船宽,B/m | 2.8 | 0.7 |
| 型深,D/m | 1.1 | 0.275 |
| 吃水,d/m | 0.51 | 0.127 5 |
| 排水质量,M/kg | 4 441.6 | 69.4 |
| 长度缩尺比,λ | 4∶1 | |
| 速度缩尺比,λv | 2∶1 |
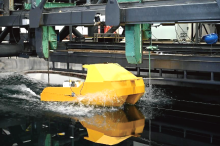
图3
试验整体布置

图4
数值波浪水池边界设置
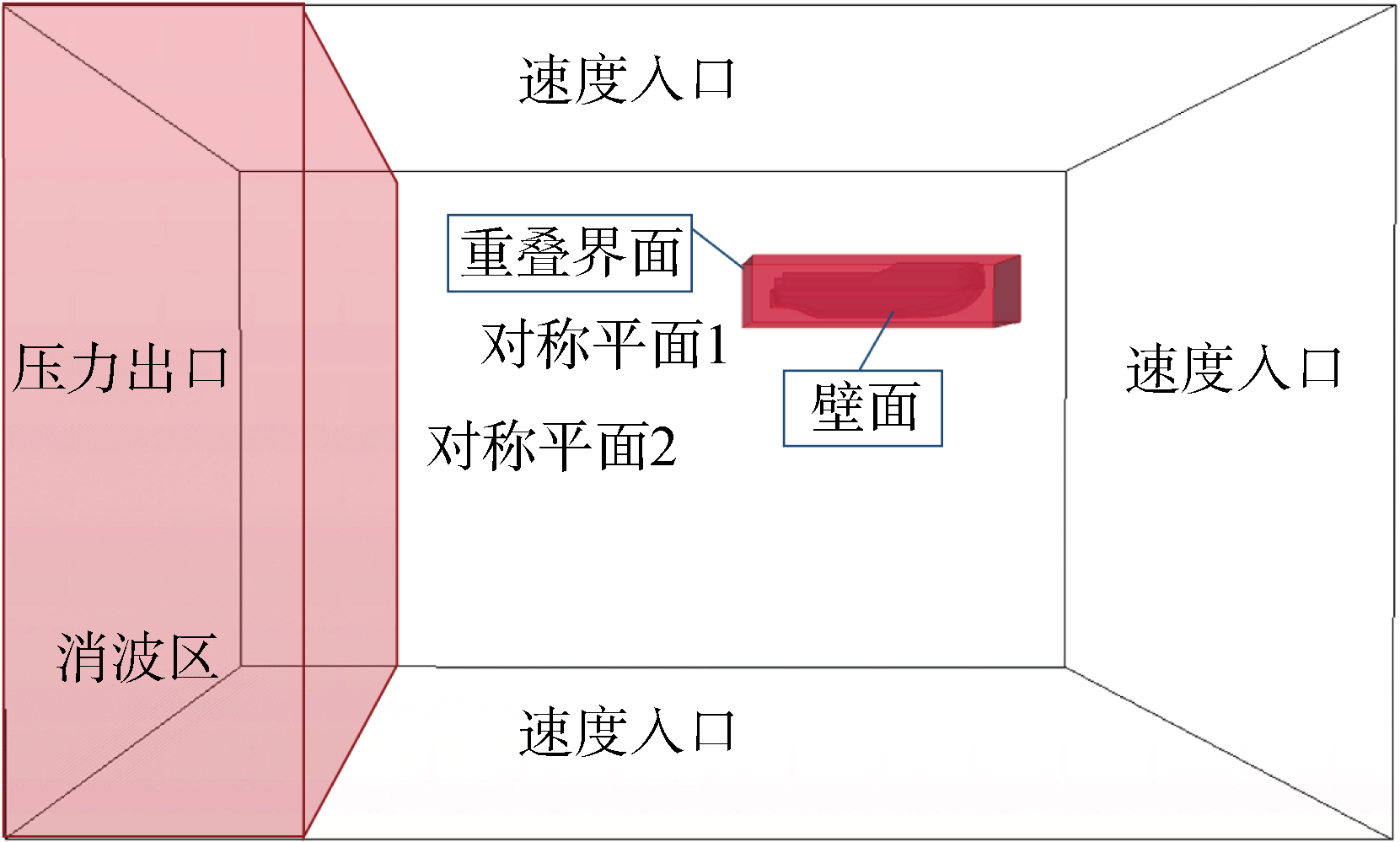
图5
计算域网格划分
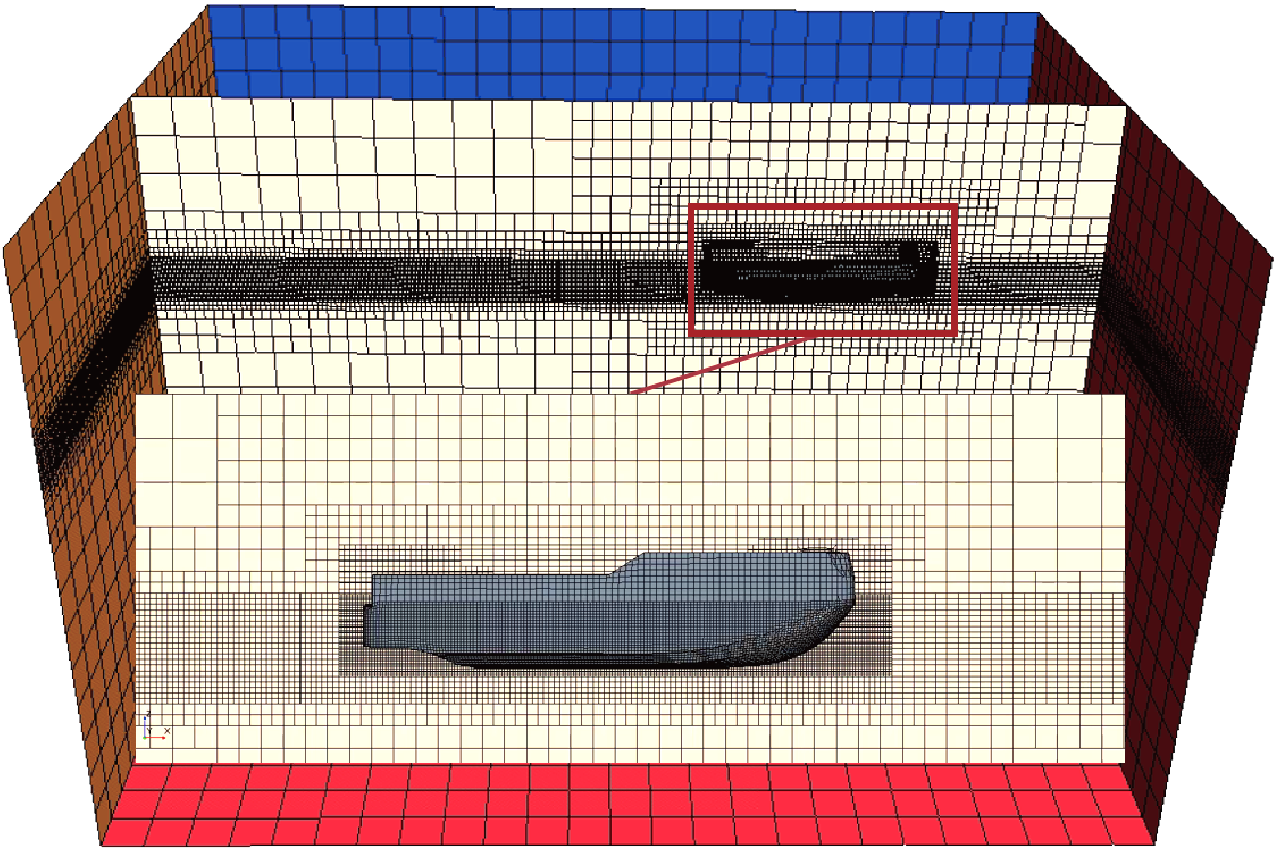
表2
网格收敛性测试阻力结果(船模航速3 kn)
| 类别 | 网格数×10-4 | 阻力/N | 与试验值的误差/% |
|---|---|---|---|
| 粗糙网格 | 48.5 | 27.067 4 | 11.23 |
| 中等网格 | 112.6 | 28.080 0 | 7.90 |
| 细化网格 | 320.8 | 28.361 9 | 6.98 |
| 水池试验 | — | 30.490 0 | — |
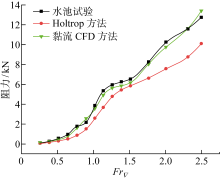
图6
静水阻力预报结果
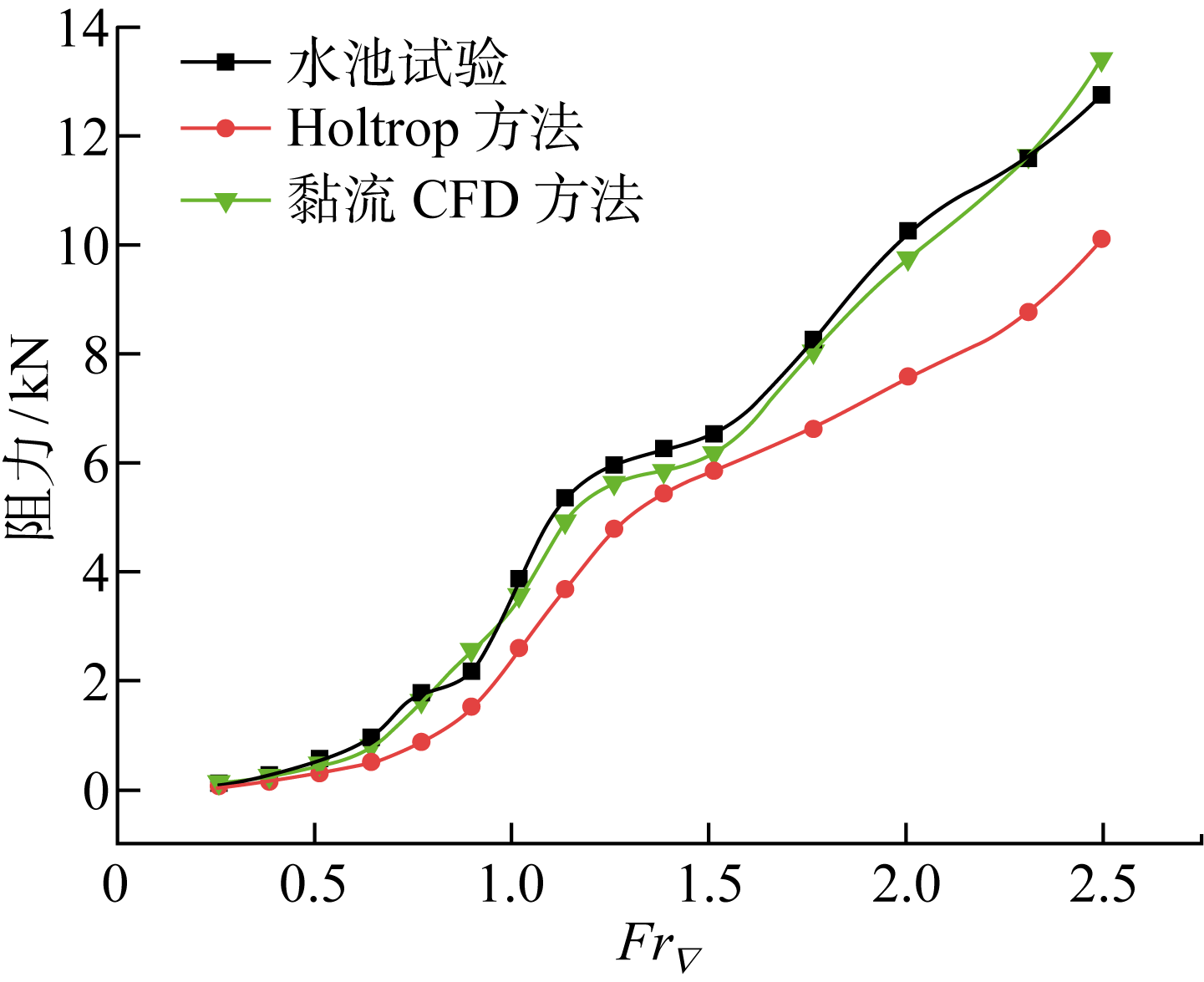
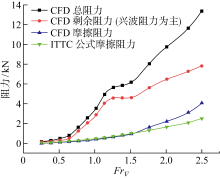
图7
阻力分量变化
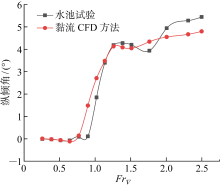
图8
CFD-物理试验纵倾值
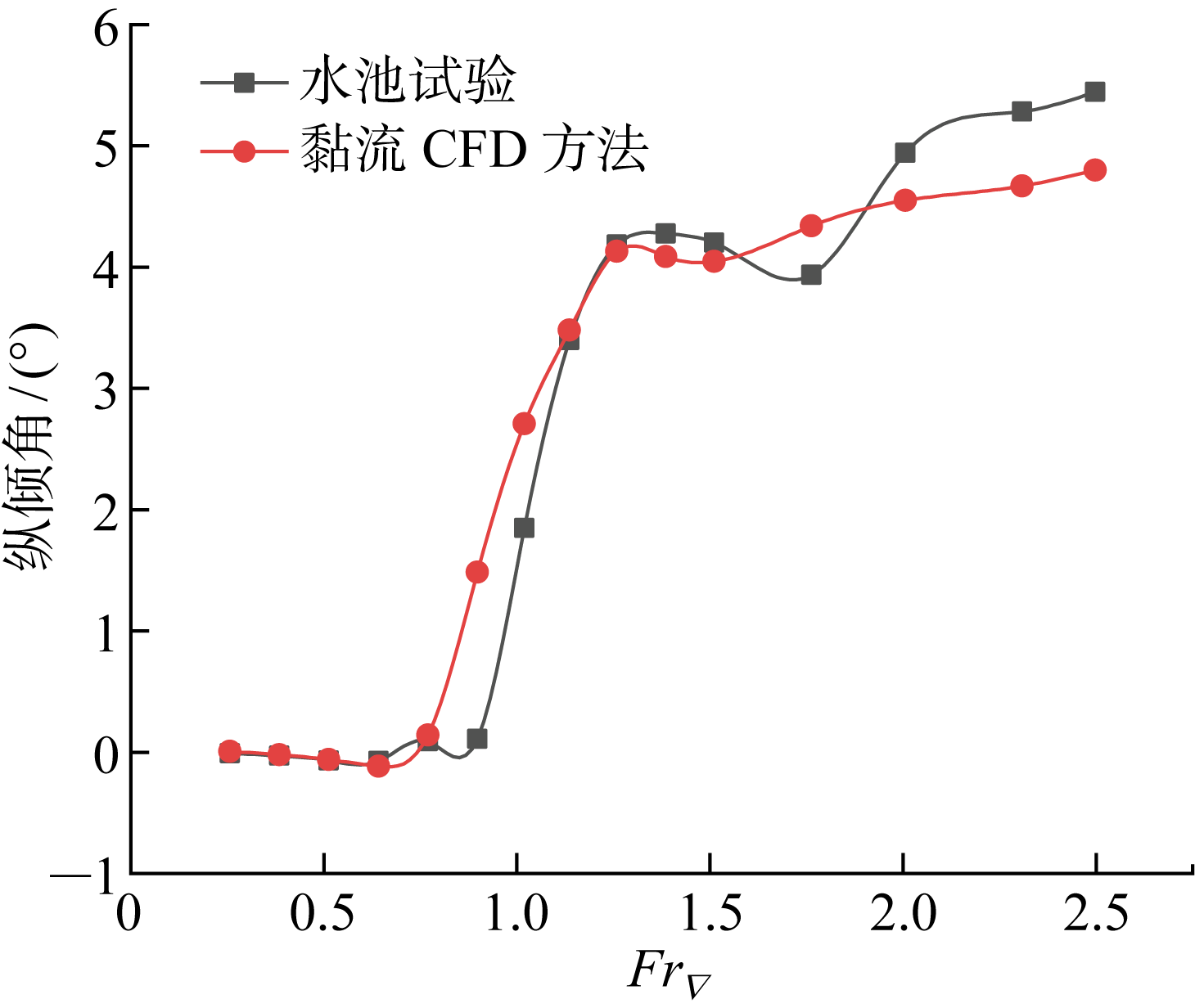
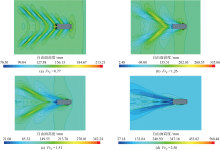
图9
CFD兴波俯视图
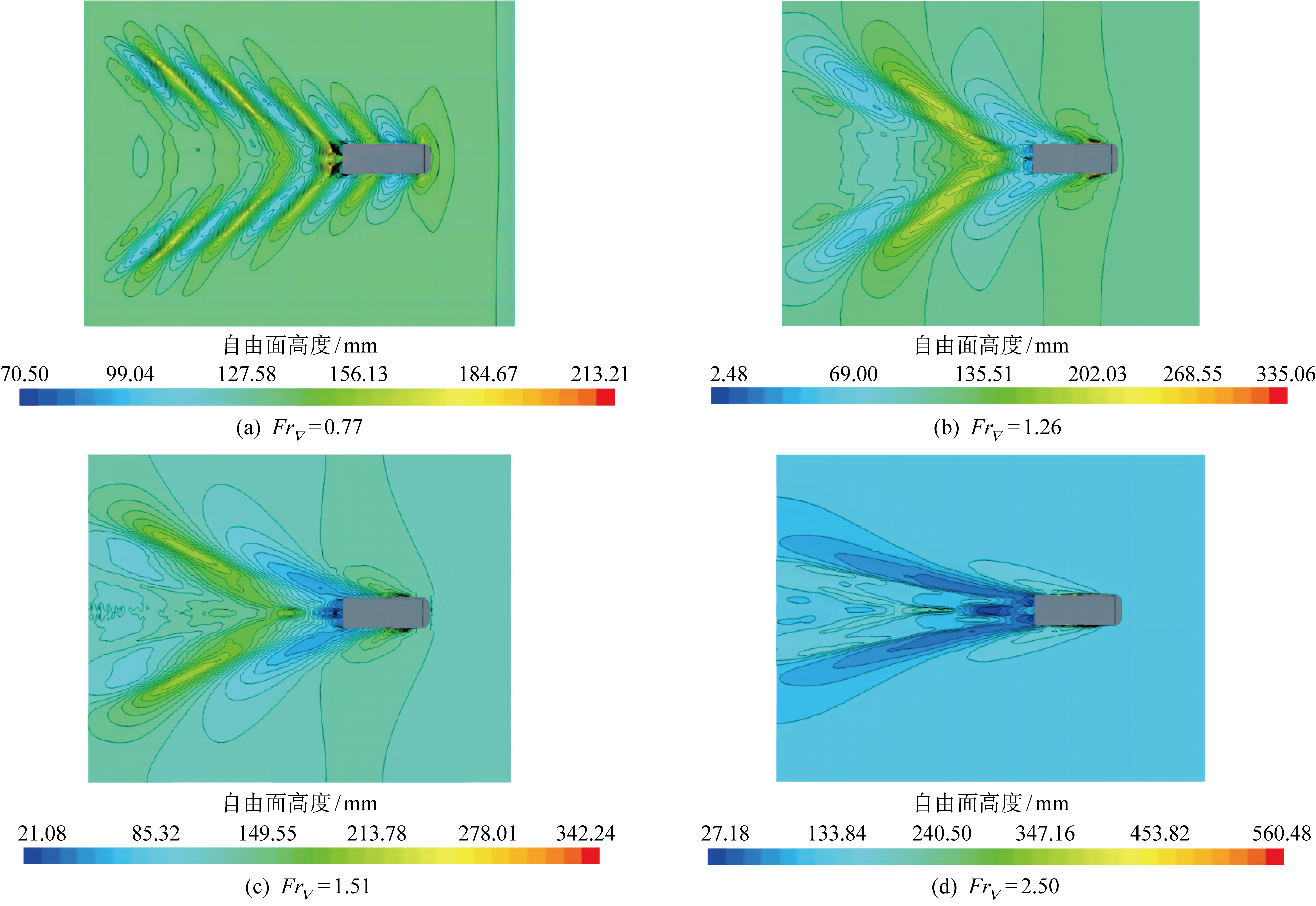
表3
航态优化分析工况
| 工况 | 重心纵向位置 (距船尾)/m | 航速/kn | 备注 |
|---|---|---|---|
| 1 | 2.8 | 6 | 尾倾 |
| 2 | 3.2 | 6 | 尾倾 |
| 3 | 3.5 | 6 | 尾倾 |
| 4 | 3.6 | 6 | 尾倾 |
| 5 | 3.848 | 6 | 初始位置 |
| 6 | 4.0 | 6 | 首倾 |
| 7 | 4.4 | 6 | 首倾 |
| 8 | 4.7 | 6 | 首倾 |
| 9 | 4.8 | 6 | 首倾 |
| 10 | 5.2 | 6 | 首倾 |
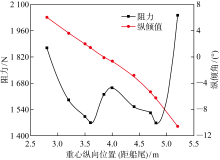
图10
航态优化阻力与纵倾值变化
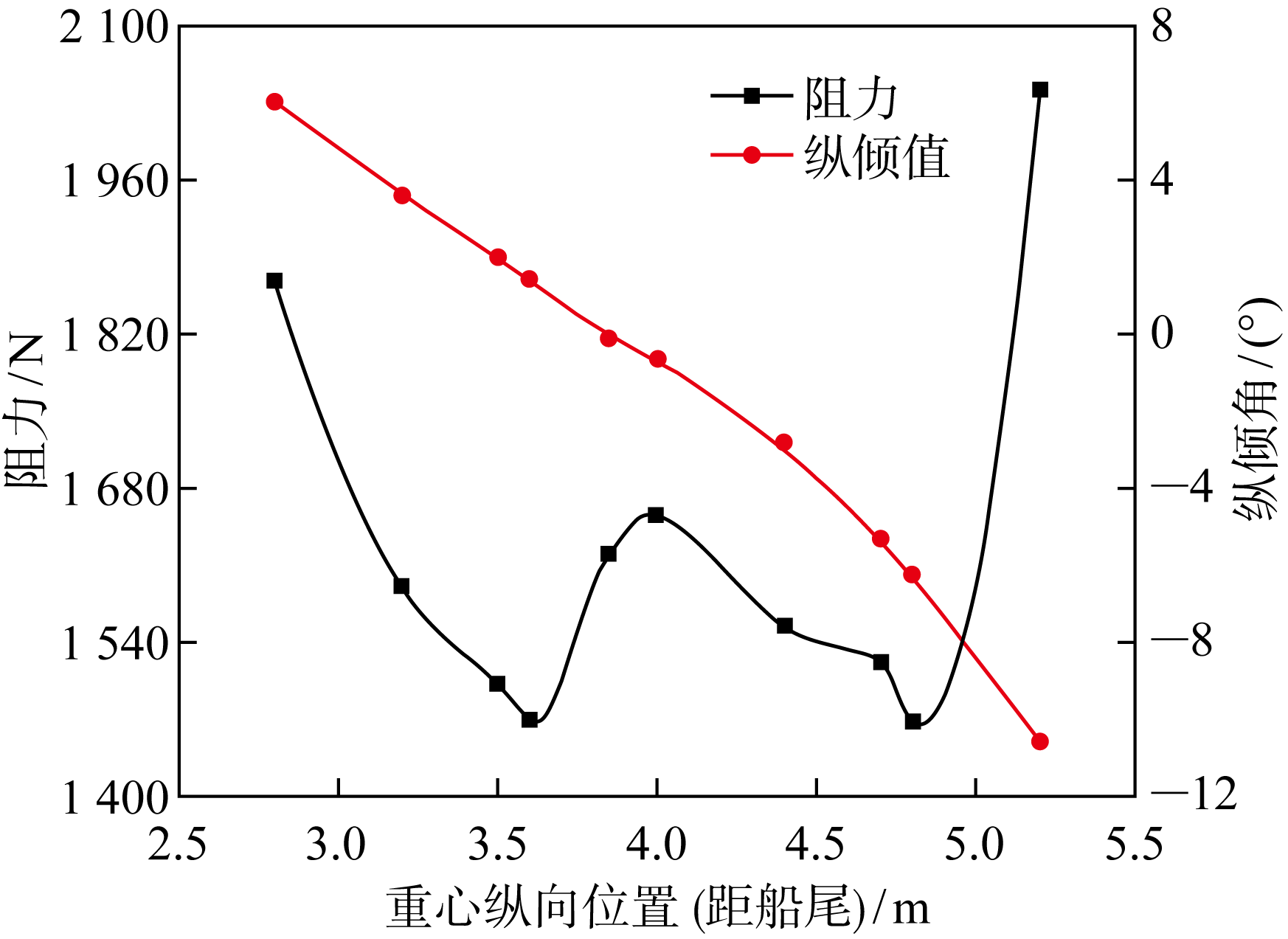
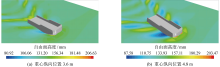
图11
两种航态船体周围波形
图12
实船5 kn航速下的片体间波形
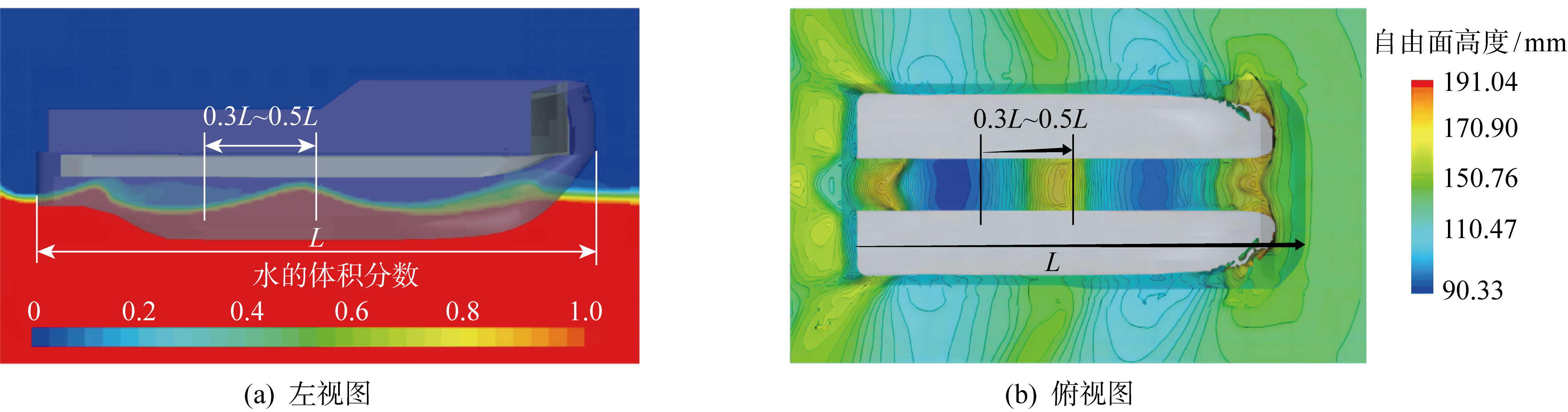
图13
实船6 kn航速下的片体间波形
| [1] | 姚天成, 赵永生, 王红雨, 等. 风光混合驱动长航程无人海空立体探测船研发[J]. 上海交通大学学报, 2021, 55(2): 215-220. |
| YAO Tiancheng, ZHAO Yongsheng, WANG Hongyu, et al. Development of a hybrid solar and wind-powered long-range unmanned ocean stereo exploration vessel[J]. Journal of Shanghai Jiao Tong University, 2021, 55(2): 215-220. | |
| [2] | 罗良. 基于一维方法和三维方法的模型尺度及实船尺度船舶阻力预报[J]. 舰船科学技术, 2022, 44(6): 18-21. |
| LUO Liang. Model-scale and full-scale ship resistance prediction based on 1D and 3D method[J]. Ship Science and Technology, 2022, 44(6): 18-21. | |
| [3] | 孙源, 卢晓平, 李井煜, 等. 滑行艇阻力计算方法对比研究[J]. 中国舰船研究, 2019, 14(1): 27-32. |
| SUN Yuan, LU Xiaoping, LI Jingyu, et al. Comparative study on simulation of resistance for planing craft[J]. Chinese Journal of Ship Research, 2019, 14(1): 27-32. | |
| [4] | 邓芳, 邓魏彬. 双体船阻力性能计算及船型设计优化[J]. 青岛科技大学学报(自然科学版), 2015, 36(1): 72-76. |
| DENG Fang, DENG Weibin. Resistance calculation and hull design and optimization of catamaran[J]. Journal of Qingdao University of Science and Technology (Natural Science Edition), 2015, 36(1): 72-76. | |
| [5] | 杨显原, 吴家鸣, 李林华. 基于最小阻力的双体无人船优化设计[J]. 舰船科学技术, 2018, 40(15): 27-32. |
| YANG Xianyuan, WU Jiaming, LI Linhua. Research on optimization design of catamaran unmanned surface vehicle based on the minimum resistance[J]. Ship Science and Technology, 2018, 40(15): 27-32. | |
| [6] | 董文才, 姚朝帮. 查洁法结合RANS方程的滑行艇阻力计算方法[J]. 上海交通大学学报, 2012, 46(8): 1223-1229. |
| DONG Wencai, YAO Chaobang. Study on method to calculate resistance of planning crafts by combination of “ЦАГИ” method and RANSE[J]. Journal of Shanghai Jiao Tong University, 2012, 46(8): 1223-1229. | |
| [7] | 倪崇本, 朱仁传, 缪国平, 等. 一种基于CFD的船舶总阻力预报方法[J]. 水动力学研究与进展(A辑), 2010, 25(5): 579-586. |
| NI Chongben, ZHU Renchuan, MIAO Guoping, et al. A method for ship resistance prediction based on CFD computation[J]. Chinese Journal of Hydrodynamics, 2010, 25(5): 579-586. | |
| [8] | 肖国权, 李天成, 黎日升, 等. 小型无人船阻力CFD模拟方法[J]. 中国测试, 2018, 44(12): 69-74. |
| XIAO Guoquan, LI Tiancheng, LI Risheng, et al. CFD simulation method on resistance of small unmanned ship[J]. China Measurement & Test, 2018, 44(12): 69-74. | |
| [9] | 邵峰, 金久才, 张杰. 无人船FLUENT阻力模拟与试验验证[J]. 海洋技术学报, 2014, 33(5): 8-12. |
| SHAO Feng, JIN Jiucai, ZHANG Jie. Numerical simulation and experimental verification for the resistance of an USV using the FLUENT software[J]. Journal of Ocean Technology, 2014, 33(5): 8-12. | |
| [10] | 方静, 黄晶, 冯佰威, 等. 基于CFD的超小型双体无人船总体设计[J]. 船舶工程, 2018, 40(5): 1-3. |
| FANG Jing, HUANG Jing, FENG Baiwei, et al. General design of unmanned ultra-small catamaran ship based on CFD[J]. Ship Engineering, 2018, 40(5): 1-3. | |
| [11] | 戴现令, 娄虎, 阮文涛, 等. 一种水质检测三体船设计及其水阻力计算[J]. 装备制造技术, 2020(5): 31-34. |
| DAI Xianling, LOU Hu, RUAN Wentao, et al. Design of a trimaran for water quality detection and calculation of its water resistance[J]. Equipment Manufacturing Technology, 2020(5): 31-34. | |
| [12] | 梁严, 吴家鸣. 三体海水采样无人船最优阻力性能设计[J]. 广州航海学院学报, 2018, 26(4): 40-44. |
| LIANG Yan, WU Jiaming. Optimum design method of seawater sampling trimaran[J]. Journal of Guangzhou Maritime University, 2018, 26(4): 40-44. | |
| [13] | 赵核毓, 陈曦, 陆屿, 等. 高速深V滑行艇阻力模型试验及数值对比研究[J]. 水动力学研究与进展(A辑), 2021, 36(4): 591-598. |
| ZHAO Heyu, CHEN Xi, LU Yu, et al. Experimental and numerical study on resistance of Deep-V planing vessels[J]. Chinese Journal of Hydrodynamics, 2021, 36(4): 591-598. | |
| [14] | 郭军, 扈喆, 陈作钢, 等. 基于STAR-CCM+的滑行艇阻力数值计算[J]. 中国造船, 2022, 63(2): 107-115. |
| GUO Jun, HU Zhe, CHEN Zuogang, et al. Numerical calculation of resistance performance of planing craft based on software STAR-CCM+[J]. Shipbuilding of China, 2022, 63(2): 107-115. | |
| [15] | MAXSURF Resistance Windows version 20 user manual[M]. USA: Bentley Systems, 2014. |
| [16] | 王楠, 周旭. 改进的Holtrop船舶阻力估算[J]. 船海工程, 2019, 48(4): 34-37. |
| WANG Nan, ZHOU Xu. Analysis of improved ship resistance prediction method[J]. Ship & Ocean Engineering, 2019, 48(4): 34-37. | |
| [17] | ITTC. ITTC recommended procedure and guidelines for resistance test:7.5-02-02-01[S]. Wuxi, China: Resistance Committee of the 28th ITTC, 2017. |
| [18] |
HOLTROP J, MENNEN G G J. An approximate power prediction method[J]. International Shipbuilding Progress, 1982, 29(335): 166-170.
doi: 10.3233/ISP-1982-2933501 URL |
| [19] | HOLTROP J. A statistical re-analysis of resistance and propulsion data[J]. International Shipbuilding Process, 1984, 31(363): 272-276. |
| [20] | MOLLAND A F, WELLICOME J F, COUSER P R. Resistance experiments on a systematic series of high speed displacement catamaran forms: Variation of length-displacement ratio and breadth-draught ratio[R]. UK: University of Southampton, 1994. |
| [21] | SIEMENS. Star-CCM+users guide[CP/DK]. Germany: Siemens Co., 2019. |
| [22] |
NIKLAS K, PRUSZKO H. Full scale CFD seakeeping simulations for case study ship redesigned from V-shaped bulbous bow to X-bow hull form[J]. Applied Ocean Research, 2019, 89: 188-201.
doi: 10.1016/j.apor.2019.05.011 URL |
| [1] | 于特, 刘佳鹏, 吴超, 周畅, 周胜增, 王磊. 基于非线性干扰观测器的无人船与自主水下航行器协同运动控制策略[J]. 上海交通大学学报, 2023, 57(S1): 114-123. |
| [2] | 毛佳, 肖景文, 赵兰浩, 底瑛棠. 基于浸入边界法的高解析度CFD-DEM流固耦合方法[J]. 上海交通大学学报, 2023, 57(8): 988-995. |
| [3] | 吴辉,富荣昌,杨晓玉,李现政,王召耀. 三种不同血液粘度模型中分叉血流的数值研究[J]. J Shanghai Jiaotong Univ Sci, 2023, 28(4): 450-. |
| [4] | 李濡宇, 毋晓妮, 陈锦剑, 蒋海里, 王会丽. 冲刷防护作业中流态固化土对海洋桩基作用力的数值研究[J]. 上海交通大学学报, 2023, 57(12): 1609-1618. |
| [5] | 王志伟, 何炎平, 李铭志, 仇明, 黄超, 刘亚东. 基于计算流体力学的90° 弯管气液两相流数值模拟及流型演化[J]. 上海交通大学学报, 2022, 56(9): 1159-1167. |
| [6] | 高昌昊, 宋文萍, 韩少强, 路宽, 王跃, 叶坤. 空空导弹过失速重新定向技术研究[J]. 空天防御, 2022, 5(3): 17-26. |
| [7] | 陈志鑫, 汪怡平, 杨亚锋, 苏建军, 杨斌. 不同送风方式下大客车内飞沫传播特性研究[J]. 上海交通大学学报, 2022, 56(11): 1532-1540. |
| [8] | 姚天成, 赵永生, 王红雨, 何炎平, 丁子龙, 池哲瀛, 蔡炜锴. 风光混合驱动长航程无人海空立体探测船研发[J]. 上海交通大学学报, 2021, 55(2): 215-220. |
| [9] | 于特, 王磊. 基于协同控制的自重构平台算法及试验验证[J]. 上海交通大学学报, 2021, 55(11): 1493-1498. |
| [10] | 张宇, 王晓亮. 基于径向点插值方法的柔性螺旋桨气动弹性模拟[J]. 上海交通大学学报, 2020, 54(9): 924-934. |
| [11] | 王瑞, 肖瑶, 顾汉洋, 叶亚楠. 螺旋管内单相流动周向非均匀传热现象的数值模拟[J]. 上海交通大学学报, 2020, 54(7): 688-696. |
| [12] | . 半潜式钻井平台风载特征及影响因素分析[J]. 海洋工程装备与技术, 2019, 6(3): 548-. |
| [13] | 毛立夫,李英辉,易宏. 斜支柱小水线面双体船水动力性能的数值研究[J]. 上海交通大学学报, 2019, 53(12): 1428-1439. |
| [14] | 孙小帅,姚朝帮,熊鹰,叶青. 基于移动脉动源格林函数的小水线面 双体船耐波性频域计算[J]. 上海交通大学学报(自然版), 2018, 52(6): 698-707. |
| [15] | 郁程,董小倩,杨晨俊. 侧推器体积力模型及其应用[J]. 上海交通大学学报(自然版), 2018, 52(3): 291-296. |
| 阅读次数 | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
全文 188
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
摘要 1188
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||