水路运输的迅速发展增大了水上事故发生率,给船员的生命安全、经济和环境带来了极大风险[1 ] .调查表明,80%以上的水上事故由人为因素造成[2 ] .通航河流河口通常存在拦门沙,但有自然存在或疏浚深槽水道供大型船舶进出.河口深槽水道狭窄、障碍物较多、交通流复杂、船舶改向操纵严重受限,往往事故多发.在部分航道外存在可供船舶安全航行的水域,具有可航水域宽度可变的特征.在这些水域进行船舶辅助航行或自主航行决策(统称“航行决策”)研究,实现辅助航行乃至自主航行,能有效提高船舶在这些水域航行的自动、自主化水平,减少人为因素导致事故,是提高航行安全水平的有效途径[3 ] .
智能航行是智能船舶主要功能模块之一,航行决策是其基础,相关研究成果丰富.文献[4 ]中设计了开阔水域多船会遇局面下的动态智能航行决策方法.文献[5 ]中提出考虑避障半径的斥力场函数方法,进一步优化了水下自主航行器在复杂环境下的规划路径.文献[6 ]中提出一种基于驾驶实践的无人船智能避碰决策方法.文献[7 ]中研究了基于双延迟深度确定性策略梯度的船舶自主避碰方法.文献[8 ]中论述船舶拟人智能避碰决策的算法原理及其基础模型的构建方法,提出避碰算法合理性及完备性的测试方案.文献[9 ]中设计了一种基于操纵过程推演的自主避碰决策支持模型.文献[10 ]中考虑目标船的不确定性,提出了一种时变碰撞风险模型.文献[11 ]中利用模型预测控制算法和模糊数学理论构建避碰算法的评价函数,实现了船舶自主避碰.文献[12 ]中基于Coldwell船舶领域改进了多船避碰危险度评估模型.
现有航行决策研究大多集中于开阔水域,采取定速变向避让方法.在航道内单凭转向难以避让,需转向变速相结合.河口深槽水域航行规则多允许必要时利用航道外可航水域避让,因此可航宽度是变化的.此类水域航行决策研究缺乏,尚有以下关键科学问题亟待解决:① 按照航行决策的需要,建立包含各类要素的数字孪生环境模型;② 和航海实践一致,归纳、量化和融入《1972年国际海上避碰规则》、地方规则和良好船艺(合称“规则”)要求[13 ] ;③ 为保证决策方案可执行性,建立基于船舶非线性操纵特性的航向航速控制和运动过程预测方法;④ 考虑河口深槽水道特殊环境和船舶行为,探究本船变速运动下速度矢量和避让效果之间的规律(避碰机理).本文围绕这4个关键科学问题,基于现有船舶按车钟挡位的分挡航速控制方法,提出了此类水域能动态自适应剩余误差和目标船机动的航行决策方法.
1 动态自适应航行决策框架构造方法
船舶智能航行需要完成环境态势感知、操纵方案决策和伺服机构执行3个步骤的循环过程.方案决策、态势感知和执行方法深度耦合:环境判断依赖于各种动静态物标和本船运动态势数据,可行方案基于环境判断和执行过程预演,执行过程依赖于船舶运动模型和航向航速控制方法的精度与可靠性.航行决策系统误差来源于感知误差(含风流、目标机动和本船态势数据误差)、本船运动模型和控制参数误差,可依靠提高传感器精度、选用合适船舶运动数学模型和优化控制器参数补偿系统误差,但误差无法完全消除,未消除的误差定义为剩余误差,可通过设计自适应系统进行补偿.
基于当前t 0 Δ t ( t 0 + Δ t ) Δ t Δ t t 0 ( t 0 + Δ t ) t 0 Δ t Δ t ( t 0 + Δ t ) k - 1 t 0 ( t 0 + k Δ t ) t 0 ( t 0 + k Δ t ) t 0 Δ t Δ t
传统船舶一般使用分挡车钟控制螺旋桨转速.考虑对现有船舶辅助其航行决策或自主航行改造升级的需要,引入分挡控制螺旋桨转速的方法,结合风浪流下的可变速船舶操纵运动数学(MMG)模型和最优航向控制方法(PID方法)推演船舶操纵运动过程.
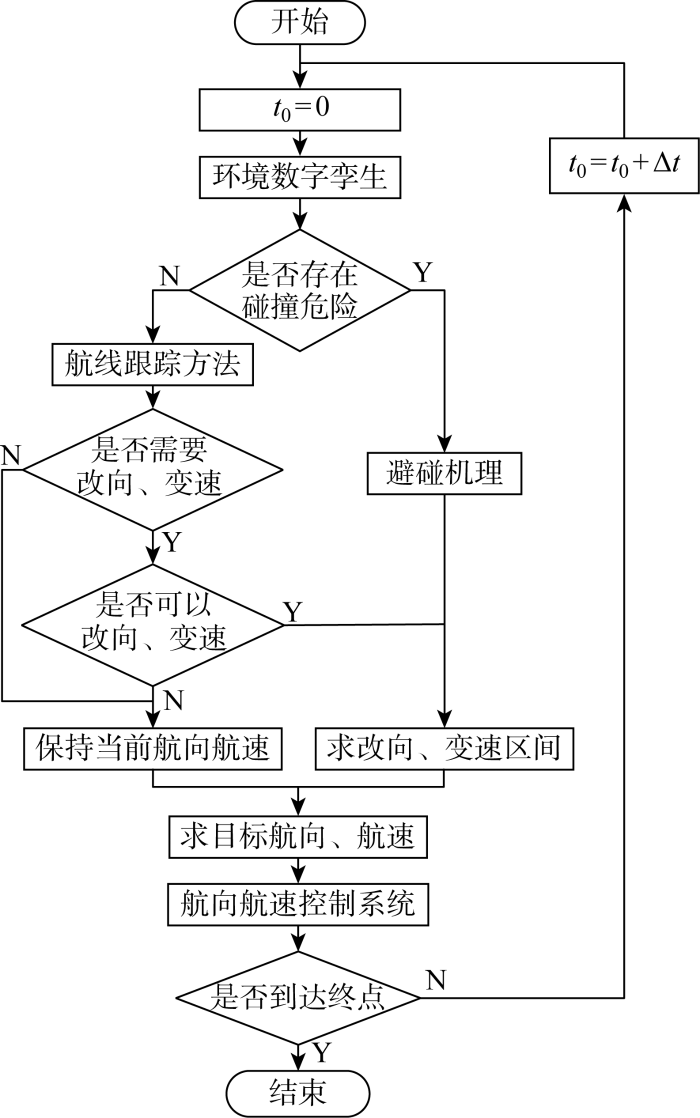
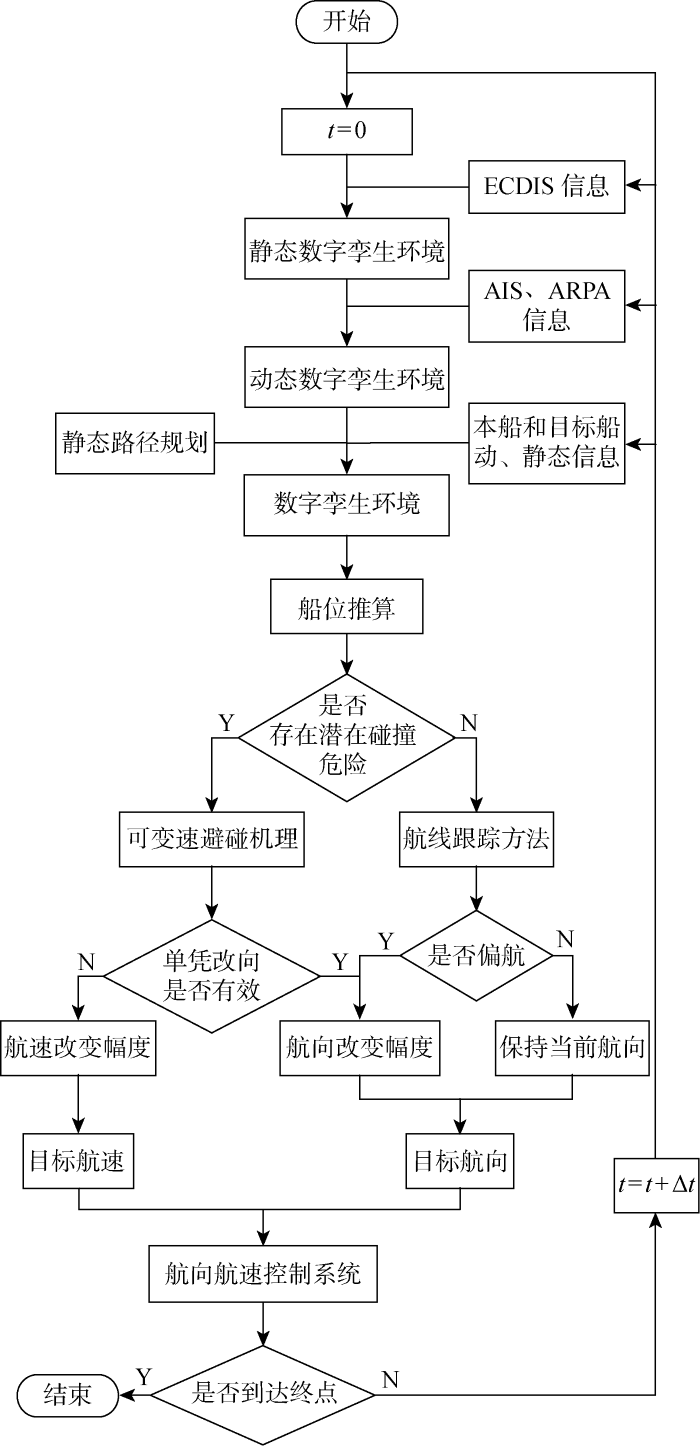
真实航行环境中,目标船可能会进行不协调避碰且极难预测.为自适应目标船本质上不可预测的机动操纵、自校正其他剩余误差,设计信息时序滚动输入、快速更新的自适应反馈校正计算框架,实现航行决策,流程如图1 所示,主要步骤如下.
图1
图1
航行决策流程
Fig.1
Navigation decision-making process
(3) 基于特殊环境船位推算方法判断是否存在碰撞危险,存在则依靠约束条件下的避碰机理确定最优方案;不存在则根据航线跟踪方法计算改向角并推演船舶操纵运动过程,确定跟踪航线是否安全,是则开始航线跟踪,否则保持当前方案.
(4) 将(3)确定的方案输出作为航行辅助决策方案,自主航行时将其输入到航向航速控制系统中.
上述方案采用时序滚动计算方法,快速更新输入信息,可补偿剩余误差对操纵方案的影响.同时,可避让不按避碰规则行动的目标船.只要信息采样频率满足奈奎斯特采样定理,当目标船发生不协调机动时,本船也会立即根据其动向调整航向,直到安全为止.
2 数字孪生环境模型和建立方法
2.1 坐标系与船舶领域
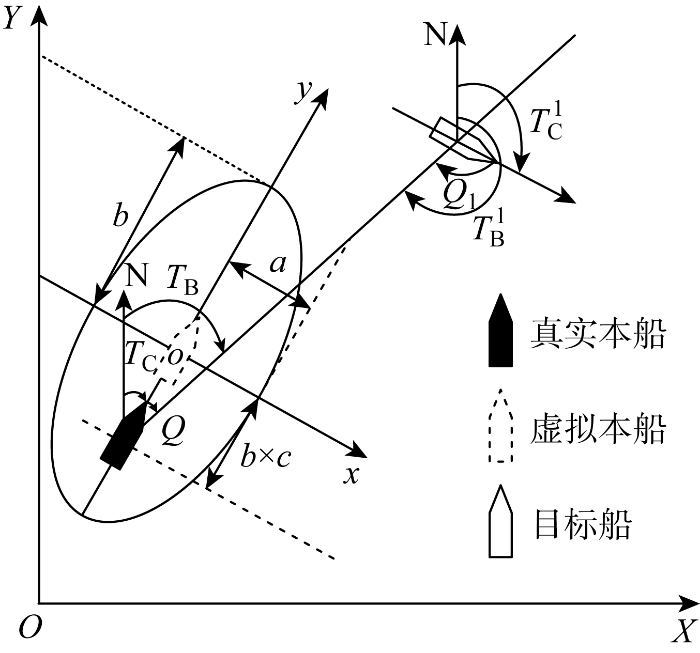
为方便导助航仪器中经纬度信息和直角坐标转换,建立以( λ 0 , φ 0 ) x o y , X 、 Y 、 x y 轴正向指向正东、北、右正横和船首,N表示正北方向,如图2 所示.图中:T C 、T C 1 T B 、 Q T B 1 、 Q 1 a、b、c 分别为椭圆船舶领域的长半轴、短半轴、偏移系数.转换关系见文献[14 ].
图2
图2
坐标系与船舶领域
Fig.2
Coordinate system and ship domain
船舶领域为避免他船和静态物标进入的区域,用于衡量船舶间的安全性[15 ] .选取1艘7.6×104 t级满载散货船“华洋理想”作为实验本船,适用船舶领域种类及参数、后续部分参数需要根据船舶特性、航行环境取值.但对于某一特定船舶、环境,可由最熟悉该船的船长确定,研究中由课题组几位有丰富航海经验也多次航行于北槽水道的船长(作者曾任“华洋理想”船长)确定.结合规则,采用如图2 所示的椭圆船舶领域模型,取a = 1.2 L , b = 0.3 L , c = 0.3 , L
2.2 环境数字孪生方法
环境是受限水域航行决策的重要约束条件,根据决策需要感知并提取研究水域环境信息、实现环境数字孪生是正确判断航行态势的必要条件.构建针对某一类场景的数字孪生环境通用模型可以作为同类其他水域研究的基础模型.
数字孪生环境由动、静态环境2类要素构成.解构和提取动、静态环境各要素,构建其数学模型,由动、静态环境特征数据驱动这些模型实现数字孪生,建立满足该类水域船舶航行决策需要数字孪生环境的流程如下.
(1) 物标分类,按照各要素的速度、几何特征等将物标分类.
(2) 分类构建环境要素数学模型,构建各类动、静态环境要素数学表达式(模型).
(3) 数字孪生静态环境,针对具体水域环境,通过电子海图显示与信息系统开发静态信息提取工具,在海图中提取航行决策所需静态环境要素的数据信息,驱动流程(2)对应数学模型使各要素数字化,构建静态数字孪生环境.
(4) 数字孪生动态环境,通过船载设备获取研究水域一定范围内的动态数据并处理,将处理后的数据驱动对应动态要素模型,构建动态数字孪生环境.
(5) 组合流程(3)、(4)所构建的动、静态环境.
以河口深槽可航宽度变化水域为例,研究水域静态环境要素包括:通航分道、航道边界线、分隔带(线)、警戒区、推荐航向、航标、航道周围的锚地和浅滩等.动态环境要素包括本船、目标船、风流以及根据船舶吃水自适应调整的航道外边界线等.
对海图中影响船舶航行决策的相关环境信息提取、建模,将定线制以外的其他环境要素分为点状、圆形、条形、多边形物标模型,具体分类如表1 所示.
某一河口深槽水道由M 个分道通航制、N 个警戒区、G 个航标、W 个不规则区域(航道附近锚地、浅滩)和D 条航道外边界线构成.分道通航制数字模型包括:通航分道、航道边界线、分隔带(线)等.公式如下:
(1) F m = { L C N m , L S N m , L R N m , L S S m , L C S m , L R S m , T N m , T S m }
式中: F m m 个分道通航制; L C N m 、 L C S m L S N m 、 L S S m L R N m 、 L R S m T N m 、 T S m n 个点组成,通航分道由航道边界线和分隔带边界线构成,连接通航分道两条边界线点连线的中点构成计划航线,公式如下:
(2) T N m = L C N m L S N m T T S m = L C S m L S S m T
(3) L C N m = ( P C N m 1 , P C N m 2 , … , P C N m n ) L S N m = ( P S N m 1 , P S N m 2 , … , P S N m n ) L R N m = ( 1 2 ( P C N m 1 + P S N m 1 ) , … , 1 2 ( P C N m n + P S N m n ) )
(4) L C S m = ( P C S m 1 , P C S m 2 , … , P C S m n ) L S S m = ( P S S m 1 , P S S m 2 , … , P S S m n ) L R S m = ( 1 2 ( P C S m 1 + P S S m 1 ) , … , 1 2 ( P C S m n + P S S m n ) )
式中:P C N m n 、 P S N m n 、 P C S m n 、 P S S m n m 个分道通航制中航道北边界线、分隔带北边界线、航道南边界线、分隔带南边界线上的第n 个点.
(5) S i = ( x i + r 1 c o s θ , y i + r 1 s i n θ ) , θ ∈ [ 0 , 2 π )
式中: S i i 个点状或圆形物标的面积; ( x i , y i ) i 个区域圆心; r 1 r 1 θ 为参数.
条形、多边形和形状不一且不规则的其他物标可用多个点连线表示,公式如下:
(6) A a = S a r e a P 1 … … P j
式中: A a a 个不规则区域; S a r e a P j j 为点的数量.
航道外边界线根据船舶吃水自适应调整,用长度不一的线段将其连成两条折线L N 、L S ,包含w 、q 个点,公式如下:
(7) L N = ( P N 1 , P N 2 , … , P N w ) L S = ( P S 1 , P S 2 , … , P S q )
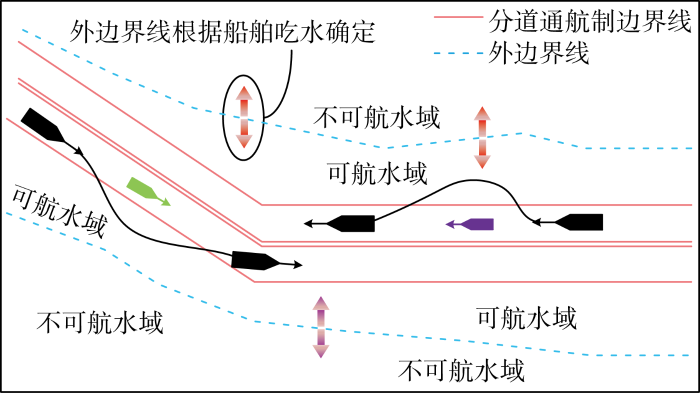
风流等动态环境要素影响船舶操纵性.在航海实践中,船舶进入深槽水道前,其吃水已确定.要进入深槽水道,必须确保航道水深(已考虑潮高)足够.为保证安全,通常只选择海图水深已满足安全要求的航道外水域作为可航水域.河口深槽水域航行规则允许必要时利用航道外可航水域进行避让.换言之,在正常航道内航行的船舶,如航道外水深允许,可驶出航道进行避让.因此,研究水域的可航宽度可根据吃水和航道外水深自适应变化,其动态特性主要体现在避碰决策时不同时刻能否驶出航道进行避让.可航宽度变化示意如图3 所示.
图3
图3
可航宽度变化示意图
Fig.3
Variation of navigable width
3 航向航速控制与航线跟踪方法
求取的操纵方案为时序的车舵指令或航向航速指令,为判断方案是否可行,需推演该方案执行后的时序轨迹,因此需要建立船舶操纵运动模型、航向航速控制和航线跟踪方法.
3.1 船舶操纵运动模型
河口深槽水道航行决策暂时不考虑船舶的纵摇、横摇和垂荡,采用三自由度MMG模型,公式如下:
(8) ( m s h i p + m y ) v · + ( m s h i p + m x ) u r = Y H + Y P + Y R + Y w i n d + Y w a v e ( m s h i p + m x ) u · - ( m s h i p + m y ) v r = X H + X P + X R + X w i n d + X w a v e ( I z z + J z z ) r · = N H + N R + N P + N w i n d + N w a v e
式中: m s h i p m x 、 m y u、v 和r分别为x 轴、y 轴方向速度和转首角速度; u · 、 v · r · x 轴、y 轴方向加速度和转首角加速度; I z z 、 J z z X、Y 和N 分别为x 轴、y 轴方向合力和转首力矩;下标H、P和R分别表示船体、螺旋桨和舵;下标wind、wave表示风、浪干扰.
考虑到大型船舶操纵特性,该模型增加了推力随转速、航速变化的影响因子,考虑了风、流等外界干扰.模型参数计算及符号含义可参阅文献[16 ].可根据初始条件按龙格库塔方法求解任意时刻位置、航向等信息.
(9) X p = ( 1 - t p 0 ) F T
式中:F T 为螺旋桨推力;t p0 为推力减额系数,与船型、螺旋桨尺度、负荷有关.t p0 受船舶运动状态及螺旋桨负荷影响,
(10) $t_{\mathrm{p} 0}=\left\{\begin{array}{ll}0.04+\frac{\left(t_{\mathrm{p} 0}^{\prime}-0.04\right) u}{u_{0}}, & u \leqslant u_{0} \\t_{\mathrm{p} 0}^{\prime}, & u>u_{0}\end{array}\right.$
式中: u 0 、 u t ' p 0
(11) $f=t_{\mathrm{p} 0}^{\prime}-t_{\mathrm{p} 0}$
(12) $\left.\begin{array}{l}f=k_{\mathrm{t}} \beta_{\mathrm{R}} \\k_{\mathrm{t}}=0.00023\left(\gamma_{\mathrm{A}} L / D_{\mathrm{p}}\right)-0.028 \\\gamma_{\mathrm{A}}=(B / d)\left[1.3\left(1-C_{\mathrm{b}}\right)-3.1 l_{\mathrm{cb}}\right] \\l_{\mathrm{cb}}=100 x_{\mathrm{c}} / L \\\beta_{\mathrm{R}}=\beta-l_{\mathrm{R}} r / v\end{array}\right\}$
式中:f 为减额系数的影响函数; β R β 分别为舵和船中心处漂角;B、d、 D p x c k t 、γ A 、C b 、l cb 和l R 分别为修正系数、船体整流系数、方形系数、浮心系数和漂角系数.
(13) F T = ρ ( N P ) 2 D p 2 K T
式中:K T 为螺旋桨推力系数;ρ 为水密度;N P 为实时转速.
3.2 自适应最优航向控制方法
传统PID参数根据经验设置,无法随船舶和航速实时调整,引入最优控制理论,自适应调整PID参数.
传统PID参数可由二阶设计方法[18 -19 ] 给出:
(14) K p = T ω n 2 K
(15) K i = T ω n 3 10 K
(16) K d = 2 T ξ ω n - 1 K
式中:ω n 、 ξ 分 别 为 固 有 振 荡 频 率 和 相 对 阻 尼 系 数 , 为 保 持 系 统 性 能 , ξ 取 值 范 围 为 0.8 ≤ ξ ≤ 1 ; K 、 T
(17) J = 1 / [ 2 ( E 2 + λ δ 2 ) ]
式中: E 为航向偏差;λ 为加权系数,其取值与风速大小相关;δ 为舵角.为使式(17)的二次型性能优化函数值最小,根据线性二次型非定点输出理论可解得舵角的控制律[20 ] :
(18) $\begin{array}{l}\delta=\left[\frac{1}{\sqrt{\lambda}} \frac{1}{K}\left(1-\sqrt{1+\frac{2 K T}{\lambda}}\right)\right]\left[\begin{array}{l}E \\E^{\prime}\end{array}\right]= \\\frac{1}{\sqrt{\lambda}} E+\frac{1}{K}\left(1-\sqrt{1+\frac{2 K T}{\lambda}}\right) E^{\prime}\end{array}$
(19) K p = 1 λ
(20) K d = 1 K 1 - 1 + 2 K T λ
船舶航向控制是一个闭环控制系统,且该系统是二阶振荡和渐进稳定的,其固有振荡频率和相对阻尼系数计算公式如下:
(21) ω n = K T λ ξ = 1 2 2 + λ K T
将式(21)代入式(14)、(16),可得到K p 、K d 的计算公式与式(19)、(20)相同,代入式(15)得到K i 的计算公式如下:
(22) K i = 1 10 K T λ
(23) ( m s h i p + m x ) s u ( s ) = [ X r - ( m s h i p + m y ) v 0 ] r ( s ) + X u v ( s ) + X δ δ ( s ) ( I z z + J z z ) s r ( s ) = N u u ( s ) + N r r ( s ) + N δ δ ( s )
式中: s 为拉普拉斯变换中的复变量;u(s)、v(s)、r(s)、δ(s) 分别为u、v、r、δ 的拉普拉斯变换; X r 、 X u 、 X δ r、u 相关的水动力系数、舵力系数; N u 、 N r 、 N δ u、r、δ 相关的首摇力矩系数;v 0
经过拉普拉斯逆换算,频域内转首角速度和横向速度对舵角的关系可转化为时域方程:
(24) T 1 T 2 r ¨ + ( T 1 + T 2 ) r · + r = K ( δ + T 3 δ · ) T 1 T 2 u ¨ + ( T 1 + T 2 ) u · + u = K u ( δ + T 3 u δ · )
式中:T 1 、 T 2 、 T 3 K u 为横向速度对舵角的增益系数;T 3u 为时间常数.
(25) T 1 T 2 = ( m s h i p + m x ) ( I z z + J z z ) C T 1 + T 2 = - ( m s h i p + m x ) N r - ( I z z + J z z ) X u C T 3 = ( m s h i p + m x ) N δ N u X δ - N δ X u K = N u X δ - N δ X u C C = X u N r - N u [ X r - ( m s h i p + m y ) v 0 ] T = T 1 + T 2 - T 3
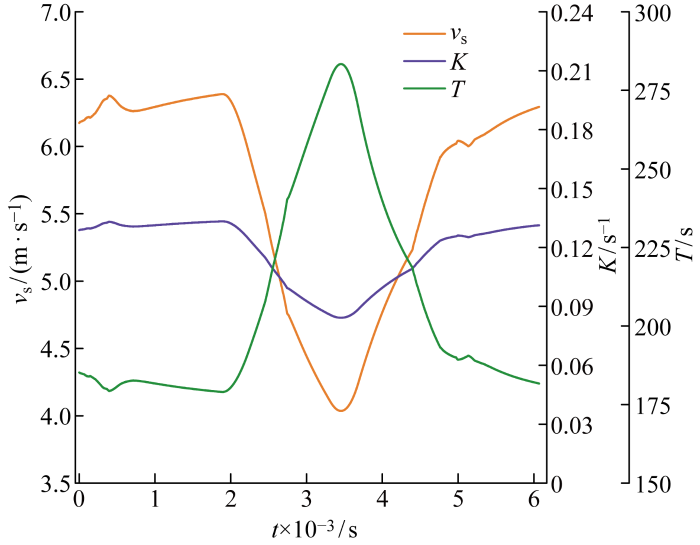
根据式(25)可通过水动力导数求出K、T 值,水动力导数与航速相关,具体计算方法详见文献[21 ].K、T 值是航速v s K、T 值也是时变的,因此,提出的航向控制方法可自适应不同船舶和航速.
以“华洋理想”轮为研究对象,取其在长江口北槽水道航行时的航速数据,可计算出随航速v s 实 时 变 化 的 K 、 T 图4 所示.
图4
图4
K 、T 值随v s 变化曲线
Fig.4
K and T versus v s
已知控制系统模型方程,根据式(24)可得到系统特征方程:
(26) T σ 3 + ( 1 + K K d ) σ 2 + K K i σ + K K p = 0
K 、T 值随航速变化曲线显示K >0,T >0. 又因为λ >0,所以K p >0,K i >0,K d >0,即特征方程的全部系数为正,并且劳斯表第1列元素均为正数.根据劳斯判据,该控制系统是稳定的.
综上,提出的航向控制方法基于最优控制策略,适用于不同船舶以航速为自变量的PID航向控制方法,可实现不同航速下的航向自适应最优控制.控制流程见文献[22 ].
3.3 分挡车钟航速控制方法
船舶变速通过改变主机转速来实现,在航海实践中,主机转速微小变化对避碰效果影响不大,使用分挡(一般10挡)车钟来发出转速指令.考虑长江北槽水道有航速限制,只需考虑进车.以“华洋理想”轮为例,如表2 所示.表中:M/V表示机动船.
若t 1 时刻发出车令,完成变速时间为t 2 ,变速前、后螺旋桨转速分别为N P 1 N P 2 t m 时刻螺旋桨转速公式如下:
(27) $N_{P}^{t}=\left\{\begin{array}{l}N_{P}^{1}, \quad t_{m} t_{1} \\N_{P}^{2}, \quad t_{m} t_{2} \\N_{P}^{1}+\left(t-t_{1}\right) k, \\t_{1} t_{m} t_{2} \text { 且 } N_{P}^{1} N_{P}^{2} \\N_{P}^{1}-\left(t-t_{1}\right) k, \\t_{1} t_{m} t_{2} \text { 且 } N_{P}^{1} N_{P}^{2}\end{array}\right.$
式中:k '为螺旋桨转速变化率,取0.25 r/s.
3.4 航线跟踪方法
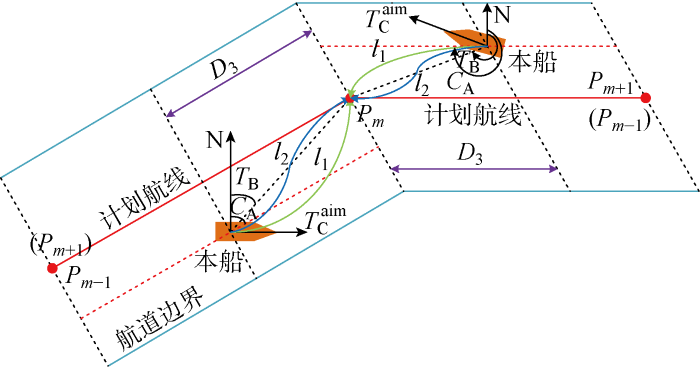
航线跟踪是指结合本船避让行动,控制船舶沿计划航线行驶的行为,关键在于自动确定下一转向点和求取目标航向.
(1) 确定下一转向点.假设计划航线包含p 个转向点,最近的记为P m P m - 1 、 P m + 1 图5 所示.计算下一时刻与当前时刻本船到P m 、 P m - 1 D 1 、 D 2 . D 1 D 2 0 P m + 1 D 1 D 2 0 P m D 3 0.3 n m i l e , P m + 1 P m
图5
图5
航线跟踪方法
Fig.5
Route tracking method
(2) 目标航向.为保证船舶能平滑地回到并沿计划航线行驶, 根据计划航向C A 和下一转向点相对本船的真方位T B 不断调整目标航向T C a i m
(28) T C a i m = τ ( T B - C A ) + C A
式中: τ 为靠拢系数,τ 值过大或过小都不利于跟踪航线.不断调整目标航向可得到如图5 所示的航线跟踪路径.经多次实验,当τ = 1 、 τ = 1.5 l 1 、 l 2 , l 2 τ = 1.5 .
4 航行决策方法
4.1 避碰机理
避碰机理是指船舶运动矢量和避碰效果之间的规律.通过探究符合船舶行为规律的研究水域避碰机理,计算可让清所有目标的操纵方案.
4.1.1 基于特殊环境船位推算方法的碰撞危险判断
为实时推算本船和目标船的船位,考虑到沿深槽水道航行船舶在航迹向和航道走向一致时,一般会继续沿航道航行,因此按照航道走向和对地速度推算船位;航迹向与航道走向有明显差别,或者是航道外船舶,按照当前航速矢量推算船位.判断操纵方案是否可行时,本船按照航向航速控制系统中的可变速MMG模型推算.顺、非顺交通流方向的目标船船位推算公式如下:
(29) $\left.\begin{array}{l}\left\{\begin{array}{l}x=x_{0}+v_{\mathrm{s}} t \sin T_{\mathrm{C}} \\y=y_{0}+v_{\mathrm{s}} t \cos T_{\mathrm{C}}\end{array} \quad t \in\left[0, t_{\mathrm{j}}\right)\right. \\\left\{\begin{array}{l}x=x_{1}+v_{\mathrm{s}}\left(t-t_{j}\right) \sin \alpha_{i+1} \\y=y_{1}+v_{\mathrm{s}}\left(t-t_{j}\right) \cos \alpha_{i+1}\end{array}\right\} \geqslant t_{\mathrm{j}}\end{array}\right\}$
(30) x = x 0 + v s t s i n T C y = y 0 + v s t c o s T C
式中: ( x 0 , y 0 ) T C t j ( x 1 , y 1 )
可暂时不考虑距离太远和离进入本船船舶领域时间长的目标船,距离小于阈值D d 时才推算一定时长的船位.D d 暂取4 n mile.判断目标船是否进入本船船舶领域,若进入,保存该目标船信息及进入时刻t ,判断公式[23 ] 如下:
(31) [ ( y - Y t ) c o s T C t + ( x - X t ) s i n T C t ] 2 a 2 + [ ( x - X t ) c o s T C t + ( y - Y t ) s i n T C t ] 2 b 2 ≤ 1
式中: T C t t 时刻本船航向;( X t , Y t ) t 时刻本船船舶领域中心位置.
本船与航标、浅滩、自适应的航道外边界线的碰撞危险也同理判断.将航道外约束边界线离散成若干个点,将航标视为静态点状障碍物.在本船运动过程中,若某一时刻有点进入本船船舶领域,则视为存在潜在碰撞危险(PCR).
4.1.2 碰撞危险度模型
碰撞危险度(CRI)是反映碰撞危险是否存在和采取避让措施紧迫程度的物理量.可分解为空间碰撞危险度(SCRI)和时间碰撞危险度(TCRI)[24 ] ,公式如下:
(32) u c = u s u t
式中:u c 、u s 、u t 分别为CRI、SCRI、TCRI的值.
定义研究水域碰撞危险形成条件为:存在PCR且到目标船进入本船船舶领域的时间t i 小于Tt ,Tt 取900 s.
(1) 空间碰撞危险度. SCRI表示两船是否存在PCR,公式如下:
(33) u s = 1 , ∃ t ∈ [ 0 , 1 800 s ] , ( X t k , Y t k ) ∈ D t 0 , t ∈ [ 0 , 1 800 s ] , ( X t k , Y t k ) ∈ D t
式中: ( X t k , Y t k ) k 艘目标船在t 时刻的船位; D t t 时刻本船船舶领域内的点集.
(2) 时间碰撞危险度. TCRI是指两船存在碰撞危险时,目标船进入本船船舶领域、采取避让措施紧迫程度的物理量[25 ] .公式如下:
(34) $u_{\mathrm{t}}=\left\{\begin{array}{ll}1, & t_{\mathrm{i}} \leqslant 0 \\\left(1-t_{\mathrm{i}} / T_{t}\right)^{3.03}, & 0<t_{\mathrm{i}}<T_{t} \\0, & t_{\mathrm{i}} \geqslant T_{t}\end{array}\right.$
如存在PCR,按照上述模型,计算CRI,确定避让行动时机.
4.1.3 规则解析与融入
规则具有强制性,航行决策时须严格遵守,需要归纳、量化和融入规则,辨识两船会遇态势,融合避碰机理.
本船为长江口北槽水道中顺交通流方向行驶的机动船,规则要求应尽早避让特殊船舶(含操限船、失控船、非机动船、渔船和帆船等).根据河口深槽水域的特点,按照会遇局面确定两机动船的避让关系.为确定两船会遇局面,引入基于舷角比对的会遇局面辨识模型[25 ] .此外,规则规定河口深槽水域航行船舶航速不得超过15 kn,航道内平均航速应不低于10 kn,该条不免除或限制船长在任何时候采取安全航速的责任.
归纳、总结规则并融入航行决策的流程框图,如图6 所示.
图6
图6
避让原则和方法
Fig.6
Principles and methods of avoidance
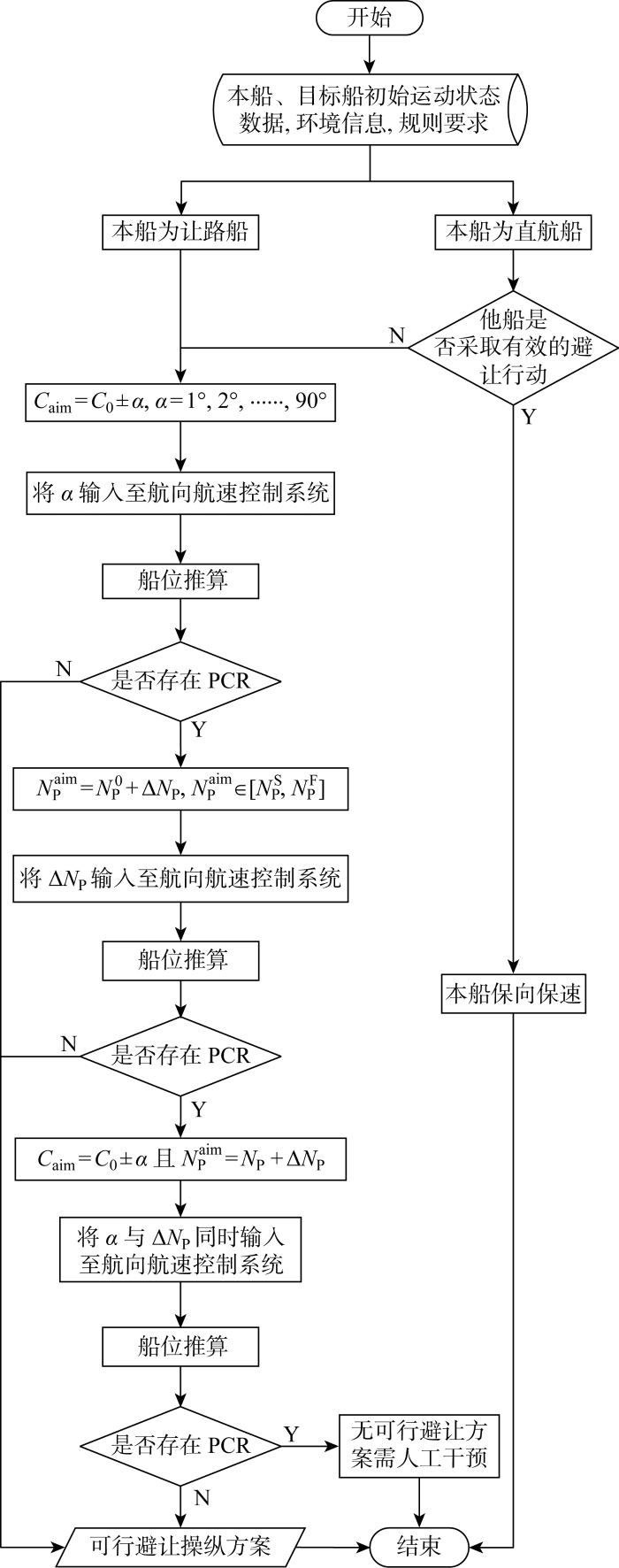
4.1.4 多约束下的可行避碰方案
船舶可采取转向、变速和转向变速结合的避让方式.在航海实践中,转向最常用,转向无法有效避让时,采用变速或转向变速结合的方式.结合环境、规则和船舶操纵性等约束条件,求取可避让一定范围内所有目标的最优操纵方案,主要步骤如下,具体流程如图7 所示.
图7
图7
可行避让方案求取
Fig.7
Derivation scheme of feasible avoidance plans
(1) 单凭转向的方案.根据规则,本船所有可行航向可表示为C a i m = C 0 ± α C 0 α 为改向角度,α = 1 ° , 2 ° , … , 90 ° .
(2) 单凭变速的方案.根据主机性能,本船可达到的螺旋桨转速可表示为N P a i m N P 0 N P ,N P 0 N P 为本船的螺旋桨初始转速、转速改变量;N P a i m N P S N P F N P S N P F
(3) 转向变速结合的方案.根据(1)和(2)中所列本船可行的航向C aim 和螺旋桨转速N P a i m
为验证操纵方案是否安全,将所有改向角、车令挡位和本船船位输入至航向航速控制系统中,计算船舶操纵过程中的位置、航向和航速等信息.基于这些信息,进行船位推算,判断任意时刻目标船及其他碍航物(航道外边界、航标、浅滩等)是否将进入本船船舶领域.
找到可行避碰方案,本船开始避让.同时根据3.4节航线跟踪方法,求取目标航向.
4.2 航行决策方法
综上,在时变环境中,按固定步长获取实时信息,判断目标船运动状态,生成自适应目标船机动的航行决策方案,并循环执行.首先提取电子海图显示与信息系统(ECDIS)、卫星定位系统、自动识别系统(AIS)和自动雷达标绘辅助(ARPA)系统等助航仪器设备中的动静态环境信息,导入要素模型,构成数字孪生环境.其次推算一段时间的本船和目标船船位,计算碰撞危险度,识别最危险目标船;根据避碰机理求取航向、航速改变幅度.任意初始条件下的航行决策模型如图8 所示.
图8
图8
航行决策模型
Fig.8
Navigation decision-making model
5 仿真实验与结果分析
5.1 数字孪生环境仿真
将河口深槽水域数字孪生环境通用模型应用到长江口北槽水道中, M =6,N =0,G =41,W =11,D =2.F m 、 S i 、 A a 、 L N 、 L S m = 1,3 , 4,5 , 6 n = 4 m = 2 n = 6 ; r 1 = 15 m a = 1,4 , 5 j = 5 , a = 2,3 , 6,7 , 8,9 , 10,11 j = 6,7 , 19,16,12,11,11,18 ; L N 、 L S w = 102 , q = 110 . 图9 所示.
图9
图9
长江口北槽深水航道数字孪生
Fig.9
Digital twinning of deep water channel in the North Channel of the Yangtze River Estuary
5.2 仿真实验
风流以及根据船舶吃水和水深自适应调整的航道外边界线属于数字孪生环境中的动态环境要素,会直接影响船舶操纵性、轨迹跟踪精度和安全避碰决策.取2023年7月22日8:00长江口北槽水道实时风流数据:风向208°,风速6.1 m/s;流向215°,流速0.1 m/s;浪高0.4 m.结合水域海图水深,确定12.5 m等深线为根据吃水自适应调整的航道外边界线.
基于上述动态数据、风流下的MMG模型和自适应最优航向控制方法以及航行规则,设置两组实验验证船舶可变速航行决策方法的可行性,船舶参数如表3 和4 所示.实验1中所有目标船均不涉及变向变速,实验2中除目标船3外其余目标船保向保速, 目标船3为一艘从锚地出发驶往上行航道的小船,初始航向245°,航速2 kn,驶出锚地过程中逐渐加速,在t =2 007 s 时开始右转并加车,在t =2 140 s 时航向为285°,航速为6.5 kn.
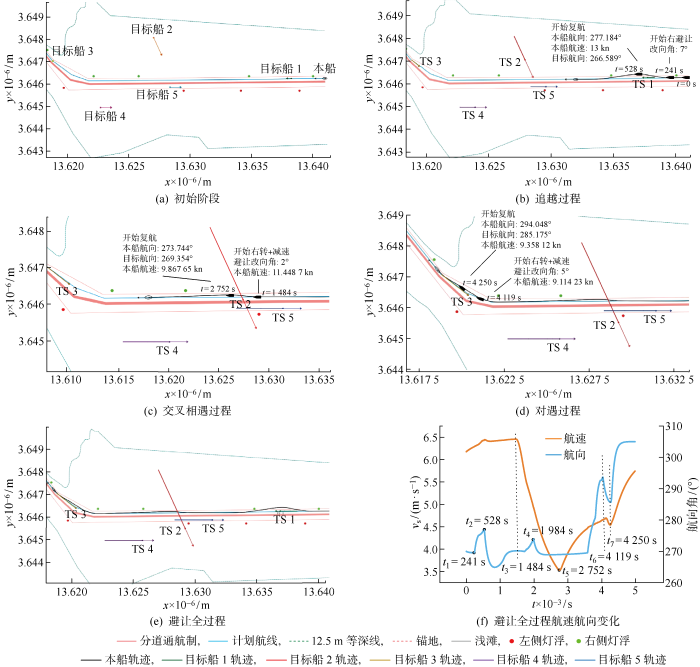
5.2.1 仿真实验1
图10
图10
实验1仿真结果
Fig.10
Simulation results of Experiment 1
该场景下,操纵决策方案为:t =241 s时,本船航向右转7° 驶出通航分道追越目标船1,t =528 s时开始航线跟踪.t =1 484 s 时,本船开始减速(将车钟降到前进1)且航向右转2° 避让目标船2,t =1 984 s 时开始航线跟踪,t =2 752 s 车钟前进2.t =4 119 s 时,本船开始减速(车钟降到前进1)且航向右转5° 避让目标船3,t =4 250 s 时开始航线跟踪,同时车钟回到前进3.
5.2.2 仿真实验2
图11
图11
实验2仿真结果
Fig.11
Simulation results of Experiment 2
该场景下,操纵决策方案为:t =37 s时,本船右转12° 驶出航道追越目标船1,t =332 s时开始航线跟踪.t =1 085 s 时,本船右转2° 避让目标船2同时车钟降到前进2,t =1 648 s 时开始航线跟踪,t =1 861 s 时将车钟回到前进3.t =2 140 s 时,本船开始右转8° 驶出通航分道追越目标船3同时持续加速,t =2 566 s 时开始航线跟踪.
5.3 结果分析
5.1节表明所提出的数字孪生环境模型适用于长江口北槽水道,能够较为全面地展示研究水域的相关静态环境信息.5.2节仿真实验1、2分别在未考虑、考虑了目标船机动的条件下,对所提出的多约束下的航行决策方案进行仿真,同时,两组实验在静态数字孪生环境的基础上,均考虑了风流等动态环境要素的约束,结果表明所提出的多约束下的航行决策方案能够安全避让所有目标.此外,避碰方案和过程涉及穷举法和重复计算验证,但基于环境、船舶操纵性、航行规则和良好船艺约束,在开始穷举验证前,筛除了不符合航海实践和海员通常做法的方案,缩小了穷举区间,降低了计算复杂度,利用C++编译器均可实现实时计算,计算时间约为0.1 s.
6 结语
针对河口深槽可航宽度变化水域的航行决策问题,考虑环境、规则和船舶操纵性等多因素约束,结合风流下的可变速MMG模型和自适应最优PID控制方法,提出了一种基于航向航速控制系统且能动态自适应系统剩余误差和目标船随机运动的可变速航行决策方法.该方法满足在此类水域安全航行的需求,实现操纵辅助决策和未来的自主航行决策,也能为后续其他类似水域航行决策实现提供理论基础.研究中尚未解决数字孪生动态环境的动态水深要素建模,变速避让范围未考虑极端情形下的“倒车”和“停车”,也未考虑变速与变向不同步时的耦合问题.后续研究可进一步完善动态水深影响下的全车钟变速、变速与变向不同步时的航行决策方法.
参考文献
View Option
[1]
张英俊 , 翟鹏宇 . 海运船舶自主避碰技术研究进展与趋势
[J]. 大连海事大学学报 2022 , 48 (3 ): 1 -11 .
[本文引用: 1]
ZHANG Yingjun ZHAI Pengyu Research progress and trend of autonomous collision avoidance technology for maritime ships
[J]. Journal of Dalian Maritime University 2022 , 48 (3 ): 1 -11 .
[本文引用: 1]
[2]
CHEN P HUANG Y MOU J et al Ship collision candidate detection method: A velocity obstacle approach
[J]. Ocean Engineering 2018 , 170 : 186 -198 .
[本文引用: 1]
[3]
张笛 , 赵银祥 , 崔一帆 , 等 . 智能船舶的研究现状可视化分析与发展趋势
[J]. 交通信息与安全 2021 , 39 (1 ): 7 -16 .
[本文引用: 1]
ZHANG Di ZHAO Yinxiang CUI Yifan et al Visualization analysis and development trend of intelligent ship research status
[J]. Traffic Information and Safety 2021 , 39 (1 ): 7 -16 .
[本文引用: 1]
[4]
HE Y LIU X ZHANG K et al Dynamic adaptive intelligent navigation decision making method for multi-object situation in open water
[J]. Ocean Engineering 2022 , 253 : 111238 .
[本文引用: 1]
[5]
马小轩 , 吴韵哲 , 吴浩峻 , 等 . 基于改进人工势场法的水下自主航行器路径规划
[J]. 船舶工程 2021 , 43 (9 ): 89 -93 .
[本文引用: 1]
MA Xiaoxuan WU Yunzhe WU Haojun et al Path planning of underwater autonomous vehicle based on improved artificial potential field method
[J]. Ship Engineering 2021 , 43 (9 ): 89 -93 .
[本文引用: 1]
[6]
丁志国 , 张新宇 , 王程博 , 等 . 基于驾驶实践的无人船智能避碰决策方法
[J]. 中国舰船研究 2021 , 16 (1 ): 96 -104 .
[本文引用: 1]
DING Zhiguo ZHANG Xinyu WANG Chengbo et al Intelligent collision avoidance decision method for unmanned ships based on driving practice
[J]. China Ship Research 2021 , 16 (1 ): 96 -104 .
[本文引用: 1]
[7]
刘钊 , 周壮壮 , 张明阳 , 等 . 基于双延迟深度确定性策略梯度的船舶自主避碰方法
[J]. 交通信息与安全 2022 , 40 (3 ): 60 -74 .
[本文引用: 1]
LIU Zhao ZHOU Zhuangzhuang ZHANG Ming-yang et al Ship autonomous collision avoidance method based on double delay depth deterministic strategy gradient
[J]. Traffic Information and Safety 2022 , 40 (3 ): 60 -74 .
[本文引用: 1]
[8]
李丽娜 , 陈国权 , 杨凌波 , 等 . 船舶拟人智能避碰决策算法测试及应用
[J]. 中国航海 2022 , 45 (1 ): 1 -7 .
[本文引用: 1]
LI Lina CHEN Guoquan YANG Lingbo et al Testing and application of intelligent collision avoidance algorithm for ship personification
[J]. Navigation of China 2022 , 45 (1 ): 1 -7 .
[本文引用: 1]
[9]
ZHANG K HUANG L LIU X et al A novel decision support methodology for autonomous collision avoidance based on deduction of manoeuvring process
[J]. Journal of Marine Science and Engineering 2022 , 10 (6 ): 765 -789 .
[本文引用: 1]
[10]
LI M MOU J CHEN L et al A rule-aware time-varying conflict risk measure for MASS considering maritime practice
[J]. Reliability Engineering and System Safety 2021 , 215 : 107816 -107836 .
[本文引用: 1]
[11]
谢鸿伟 , 张英俊 , 邢胜伟 , 等 . 基于模型预测控制的船舶自主避碰方法
[J]. 船舶工程 2021 , 43 (8 ): 23 -28 .
[本文引用: 1]
XIE Hongwei ZHANG Yingjun XING Shengwei et al Ship autonomous collision avoidance method based on model predictive control
[J]. Ship Engineering 2021 , 43 (8 ): 23 -28 .
[本文引用: 1]
[12]
朱凯歌 , 史国友 , 汪琪 , 等 . 基于船舶领域的碰撞危险度评估模型
[J]. 上海海事大学学报 2020 , 41 (2 ): 1 -5 .
[本文引用: 1]
ZHU Kaige SHI Guoyou WANG Qi et al Collision risk assessment model based on ship field
[J]. Journal of Shanghai Maritime University 2020 , 41 (2 ): 1 -5 .
[本文引用: 1]
[13]
中华人民共和国港务监督局 . 1972年国际海上避碰规则 [M]. 北京 : 人民交通出版社 , 1998 .
[本文引用: 1]
Port Supervision Authority of the People’s Republic of China . International regulations for preventing collisions at sea, 1972 [M]. Beijing : People’s Communications Press , 1998 .
[本文引用: 1]
[14]
黄立文 , 李浩宇 , 梁宇 , 等 . 基于操纵过程推演的船舶可变速自动避碰决策方法
[J]. 交通信息与安全 2021 , 39 (6 ): 1 -10 .
[本文引用: 1]
HUANG Liwen LI Haoyu LIANG Yu et al Decision-making method of automatic collision avoidance for ships with variable speed based on maneuvering process inference
[J]. Traffic Information and Safety 2021 , 39 (6 ): 1 -10 .
[本文引用: 1]
[15]
周田瑞 , 邵哲平 , 潘家财 , 等 . 基于AIS数据挖掘的受限水域船舶动态领域研究
[J]. 集美大学学报(自然科学版) 2018 , 23 (1 ): 33 -38 .
[本文引用: 1]
ZHOU Tianrui SHAO Zheping PAN Jiacai et al Research on ship dynamics in restricted waters based on AIS data mining
[J]. Journal of Jimei University (Natural Science Edition) 2018 , 23 (1 ): 33 -38 .
[本文引用: 1]
[16]
XIA Y ZHENG S YANG Y et al Ship maneuvering performance prediction based on MMG model
[J]. IOP Conference Series: Materials Science and Engineering 2018 , 452 (4 ): 042046 .
[本文引用: 1]
[17]
卢贤续 . 风浪影响下大型邮轮电力推进系统操纵特性仿真 [D]. 哈尔滨 : 哈尔滨工程大学 , 2021 .
[本文引用: 1]
LU Xianxu Simulation of control characteristics of electric propulsion system of large cruise ship under the influence of wind and waves [D]. Harbin : Harbin Engineering University , 2021 .
[本文引用: 1]
[18]
鞠世琼 . 船舶航迹舵控制技术研究与设计 [D]. 哈尔滨 : 哈尔滨工程大学 , 2007 .
[本文引用: 1]
JU Shiqiong Research and design of ship track rudder control technology [D]. Harbin : Harbin Engineering University , 2007 .
[本文引用: 1]
[19]
DYDA A A CHINCHUKOVA E P OSKIN D A et al An effective and simple adaptive algorithm for ship course control systems
[C]// International Multi-Conference on Industrial Engineering and Modern Technologies (FarEastCon) Vladivostok,Russia : IEEE , 2019 : 1 -4 .
[本文引用: 1]
[20]
NEKOO R S Nonlinear closed loop optimal control: A modified state-dependent Riccati equation
[J]. ISA Transactions 2013 , 52 (2 ): 285 -290 .
DOI:10.1016/j.isatra.2012.10.005
PMID:23158930
[本文引用: 1]
The state-dependent Riccati equation (SDRE), as a controller, has been introduced and implemented since the 90s. In this article, the other aspects of this controller are declared which shows the capability of this technique. First, a general case which has control nonlinearities and time varying weighting matrix Q is solved with three approaches: exact solution (ES), online control update (OCU) and power series approximation (PSA). The proposed PSA in this paper is able to deal with time varying or state-dependent Q in nonlinear systems. As a result of having the solution of nonlinear systems with complex Q containing constraints, using OCU and proposed PSA, a method is introduced to prevent the collision of an end-effector of a robot and an obstacle which shows the adaptability of the SDRE controller. Two examples to support the idea are presented and conferred. Supplementing constraints to the SDRE via matrix Q, this approach is named a modified SDRE.Copyright © 2012 ISA. Published by Elsevier Ltd. All rights reserved.
[21]
张显库 , 任俊生 , 张秀凤 . 船舶建模与控制 [M]. 大连 : 大连海事大学出版社 , 2014 .
[本文引用: 1]
ZHANG Xianku REN Junsheng ZHANG Xiufeng Ship modeling and control [M]. Dalian : Dalian Maritime University Press , 2014 .
[本文引用: 1]
[22]
贺益雄 , 张晓寒 , 胡惟璇 , 等 . 基于航向控制系统的船舶动态避碰机理
[J]. 西南交通大学学报 2020 , 55 (5 ): 988 -993 .
[本文引用: 1]
HE Yixiong ZHANG Xiaohan HU Weixuan et al Dynamic collision avoidance mechanism of ship based on course control system
[J]. Journal of Southwest Jiaotong University 2020 , 55 (5 ): 988 -993 .
[本文引用: 1]
[23]
贺益雄 , 于德清 , 刘霄 , 等 . 成山角分道通航制水域航行风险辨识与操纵决策方法
[J]. 交通信息与安全 2022 , 40 (5 ): 34 -43 .
[本文引用: 1]
HE Yixiong YU Deqing LIU Xiao et al A method of risk identification and decision-making support for ship maneuvers at Chengshanjiao waters under traffic separation scheme
[J]. Traffic Information and Safety 2022 , 40 (5 ): 34 -43 .
[本文引用: 1]
[24]
宁君 , 李学健 , 李伟 , 等 . 基于改进人工势场法的船舶自动避碰研究
[J]. 舰船科学技术 2021 , 43 (23 ): 59 -64 .
[本文引用: 1]
NING Jun LI Xuejian LI Wei et al Research on ship automatic collision avoidance based on improved artificial potential field method
[J]. Ship Science and Technology 2021 , 43 (23 ): 59 -64 .
[本文引用: 1]
[25]
贺益雄 , 于德清 , 刘霄 , 等 . 成山角水域动态自适应自主航行决策方法
[J]. 哈尔滨工程大学学报 2023 , 44 (10 ): 1680 -1688 .
[本文引用: 2]
HE Yixiong YU Deqing LIU Xiao et al A dynamic adaptive autonomous navigation decision method for Chengshanjiao waters
[J]. Journal of Harbin Engineering University 2023 , 44 (10 ): 1680 -1688 .
[本文引用: 2]
海运船舶自主避碰技术研究进展与趋势
1
2022
... 水路运输的迅速发展增大了水上事故发生率,给船员的生命安全、经济和环境带来了极大风险[1 ] .调查表明,80%以上的水上事故由人为因素造成[2 ] .通航河流河口通常存在拦门沙,但有自然存在或疏浚深槽水道供大型船舶进出.河口深槽水道狭窄、障碍物较多、交通流复杂、船舶改向操纵严重受限,往往事故多发.在部分航道外存在可供船舶安全航行的水域,具有可航水域宽度可变的特征.在这些水域进行船舶辅助航行或自主航行决策(统称“航行决策”)研究,实现辅助航行乃至自主航行,能有效提高船舶在这些水域航行的自动、自主化水平,减少人为因素导致事故,是提高航行安全水平的有效途径[3 ] . ...
Research progress and trend of autonomous collision avoidance technology for maritime ships
1
2022
... 水路运输的迅速发展增大了水上事故发生率,给船员的生命安全、经济和环境带来了极大风险[1 ] .调查表明,80%以上的水上事故由人为因素造成[2 ] .通航河流河口通常存在拦门沙,但有自然存在或疏浚深槽水道供大型船舶进出.河口深槽水道狭窄、障碍物较多、交通流复杂、船舶改向操纵严重受限,往往事故多发.在部分航道外存在可供船舶安全航行的水域,具有可航水域宽度可变的特征.在这些水域进行船舶辅助航行或自主航行决策(统称“航行决策”)研究,实现辅助航行乃至自主航行,能有效提高船舶在这些水域航行的自动、自主化水平,减少人为因素导致事故,是提高航行安全水平的有效途径[3 ] . ...
Ship collision candidate detection method: A velocity obstacle approach
1
2018
... 水路运输的迅速发展增大了水上事故发生率,给船员的生命安全、经济和环境带来了极大风险[1 ] .调查表明,80%以上的水上事故由人为因素造成[2 ] .通航河流河口通常存在拦门沙,但有自然存在或疏浚深槽水道供大型船舶进出.河口深槽水道狭窄、障碍物较多、交通流复杂、船舶改向操纵严重受限,往往事故多发.在部分航道外存在可供船舶安全航行的水域,具有可航水域宽度可变的特征.在这些水域进行船舶辅助航行或自主航行决策(统称“航行决策”)研究,实现辅助航行乃至自主航行,能有效提高船舶在这些水域航行的自动、自主化水平,减少人为因素导致事故,是提高航行安全水平的有效途径[3 ] . ...
智能船舶的研究现状可视化分析与发展趋势
1
2021
... 水路运输的迅速发展增大了水上事故发生率,给船员的生命安全、经济和环境带来了极大风险[1 ] .调查表明,80%以上的水上事故由人为因素造成[2 ] .通航河流河口通常存在拦门沙,但有自然存在或疏浚深槽水道供大型船舶进出.河口深槽水道狭窄、障碍物较多、交通流复杂、船舶改向操纵严重受限,往往事故多发.在部分航道外存在可供船舶安全航行的水域,具有可航水域宽度可变的特征.在这些水域进行船舶辅助航行或自主航行决策(统称“航行决策”)研究,实现辅助航行乃至自主航行,能有效提高船舶在这些水域航行的自动、自主化水平,减少人为因素导致事故,是提高航行安全水平的有效途径[3 ] . ...
Visualization analysis and development trend of intelligent ship research status
1
2021
... 水路运输的迅速发展增大了水上事故发生率,给船员的生命安全、经济和环境带来了极大风险[1 ] .调查表明,80%以上的水上事故由人为因素造成[2 ] .通航河流河口通常存在拦门沙,但有自然存在或疏浚深槽水道供大型船舶进出.河口深槽水道狭窄、障碍物较多、交通流复杂、船舶改向操纵严重受限,往往事故多发.在部分航道外存在可供船舶安全航行的水域,具有可航水域宽度可变的特征.在这些水域进行船舶辅助航行或自主航行决策(统称“航行决策”)研究,实现辅助航行乃至自主航行,能有效提高船舶在这些水域航行的自动、自主化水平,减少人为因素导致事故,是提高航行安全水平的有效途径[3 ] . ...
Dynamic adaptive intelligent navigation decision making method for multi-object situation in open water
1
2022
... 智能航行是智能船舶主要功能模块之一,航行决策是其基础,相关研究成果丰富.文献[4 ]中设计了开阔水域多船会遇局面下的动态智能航行决策方法.文献[5 ]中提出考虑避障半径的斥力场函数方法,进一步优化了水下自主航行器在复杂环境下的规划路径.文献[6 ]中提出一种基于驾驶实践的无人船智能避碰决策方法.文献[7 ]中研究了基于双延迟深度确定性策略梯度的船舶自主避碰方法.文献[8 ]中论述船舶拟人智能避碰决策的算法原理及其基础模型的构建方法,提出避碰算法合理性及完备性的测试方案.文献[9 ]中设计了一种基于操纵过程推演的自主避碰决策支持模型.文献[10 ]中考虑目标船的不确定性,提出了一种时变碰撞风险模型.文献[11 ]中利用模型预测控制算法和模糊数学理论构建避碰算法的评价函数,实现了船舶自主避碰.文献[12 ]中基于Coldwell船舶领域改进了多船避碰危险度评估模型. ...
基于改进人工势场法的水下自主航行器路径规划
1
2021
... 智能航行是智能船舶主要功能模块之一,航行决策是其基础,相关研究成果丰富.文献[4 ]中设计了开阔水域多船会遇局面下的动态智能航行决策方法.文献[5 ]中提出考虑避障半径的斥力场函数方法,进一步优化了水下自主航行器在复杂环境下的规划路径.文献[6 ]中提出一种基于驾驶实践的无人船智能避碰决策方法.文献[7 ]中研究了基于双延迟深度确定性策略梯度的船舶自主避碰方法.文献[8 ]中论述船舶拟人智能避碰决策的算法原理及其基础模型的构建方法,提出避碰算法合理性及完备性的测试方案.文献[9 ]中设计了一种基于操纵过程推演的自主避碰决策支持模型.文献[10 ]中考虑目标船的不确定性,提出了一种时变碰撞风险模型.文献[11 ]中利用模型预测控制算法和模糊数学理论构建避碰算法的评价函数,实现了船舶自主避碰.文献[12 ]中基于Coldwell船舶领域改进了多船避碰危险度评估模型. ...
Path planning of underwater autonomous vehicle based on improved artificial potential field method
1
2021
... 智能航行是智能船舶主要功能模块之一,航行决策是其基础,相关研究成果丰富.文献[4 ]中设计了开阔水域多船会遇局面下的动态智能航行决策方法.文献[5 ]中提出考虑避障半径的斥力场函数方法,进一步优化了水下自主航行器在复杂环境下的规划路径.文献[6 ]中提出一种基于驾驶实践的无人船智能避碰决策方法.文献[7 ]中研究了基于双延迟深度确定性策略梯度的船舶自主避碰方法.文献[8 ]中论述船舶拟人智能避碰决策的算法原理及其基础模型的构建方法,提出避碰算法合理性及完备性的测试方案.文献[9 ]中设计了一种基于操纵过程推演的自主避碰决策支持模型.文献[10 ]中考虑目标船的不确定性,提出了一种时变碰撞风险模型.文献[11 ]中利用模型预测控制算法和模糊数学理论构建避碰算法的评价函数,实现了船舶自主避碰.文献[12 ]中基于Coldwell船舶领域改进了多船避碰危险度评估模型. ...
基于驾驶实践的无人船智能避碰决策方法
1
2021
... 智能航行是智能船舶主要功能模块之一,航行决策是其基础,相关研究成果丰富.文献[4 ]中设计了开阔水域多船会遇局面下的动态智能航行决策方法.文献[5 ]中提出考虑避障半径的斥力场函数方法,进一步优化了水下自主航行器在复杂环境下的规划路径.文献[6 ]中提出一种基于驾驶实践的无人船智能避碰决策方法.文献[7 ]中研究了基于双延迟深度确定性策略梯度的船舶自主避碰方法.文献[8 ]中论述船舶拟人智能避碰决策的算法原理及其基础模型的构建方法,提出避碰算法合理性及完备性的测试方案.文献[9 ]中设计了一种基于操纵过程推演的自主避碰决策支持模型.文献[10 ]中考虑目标船的不确定性,提出了一种时变碰撞风险模型.文献[11 ]中利用模型预测控制算法和模糊数学理论构建避碰算法的评价函数,实现了船舶自主避碰.文献[12 ]中基于Coldwell船舶领域改进了多船避碰危险度评估模型. ...
Intelligent collision avoidance decision method for unmanned ships based on driving practice
1
2021
... 智能航行是智能船舶主要功能模块之一,航行决策是其基础,相关研究成果丰富.文献[4 ]中设计了开阔水域多船会遇局面下的动态智能航行决策方法.文献[5 ]中提出考虑避障半径的斥力场函数方法,进一步优化了水下自主航行器在复杂环境下的规划路径.文献[6 ]中提出一种基于驾驶实践的无人船智能避碰决策方法.文献[7 ]中研究了基于双延迟深度确定性策略梯度的船舶自主避碰方法.文献[8 ]中论述船舶拟人智能避碰决策的算法原理及其基础模型的构建方法,提出避碰算法合理性及完备性的测试方案.文献[9 ]中设计了一种基于操纵过程推演的自主避碰决策支持模型.文献[10 ]中考虑目标船的不确定性,提出了一种时变碰撞风险模型.文献[11 ]中利用模型预测控制算法和模糊数学理论构建避碰算法的评价函数,实现了船舶自主避碰.文献[12 ]中基于Coldwell船舶领域改进了多船避碰危险度评估模型. ...
基于双延迟深度确定性策略梯度的船舶自主避碰方法
1
2022
... 智能航行是智能船舶主要功能模块之一,航行决策是其基础,相关研究成果丰富.文献[4 ]中设计了开阔水域多船会遇局面下的动态智能航行决策方法.文献[5 ]中提出考虑避障半径的斥力场函数方法,进一步优化了水下自主航行器在复杂环境下的规划路径.文献[6 ]中提出一种基于驾驶实践的无人船智能避碰决策方法.文献[7 ]中研究了基于双延迟深度确定性策略梯度的船舶自主避碰方法.文献[8 ]中论述船舶拟人智能避碰决策的算法原理及其基础模型的构建方法,提出避碰算法合理性及完备性的测试方案.文献[9 ]中设计了一种基于操纵过程推演的自主避碰决策支持模型.文献[10 ]中考虑目标船的不确定性,提出了一种时变碰撞风险模型.文献[11 ]中利用模型预测控制算法和模糊数学理论构建避碰算法的评价函数,实现了船舶自主避碰.文献[12 ]中基于Coldwell船舶领域改进了多船避碰危险度评估模型. ...
Ship autonomous collision avoidance method based on double delay depth deterministic strategy gradient
1
2022
... 智能航行是智能船舶主要功能模块之一,航行决策是其基础,相关研究成果丰富.文献[4 ]中设计了开阔水域多船会遇局面下的动态智能航行决策方法.文献[5 ]中提出考虑避障半径的斥力场函数方法,进一步优化了水下自主航行器在复杂环境下的规划路径.文献[6 ]中提出一种基于驾驶实践的无人船智能避碰决策方法.文献[7 ]中研究了基于双延迟深度确定性策略梯度的船舶自主避碰方法.文献[8 ]中论述船舶拟人智能避碰决策的算法原理及其基础模型的构建方法,提出避碰算法合理性及完备性的测试方案.文献[9 ]中设计了一种基于操纵过程推演的自主避碰决策支持模型.文献[10 ]中考虑目标船的不确定性,提出了一种时变碰撞风险模型.文献[11 ]中利用模型预测控制算法和模糊数学理论构建避碰算法的评价函数,实现了船舶自主避碰.文献[12 ]中基于Coldwell船舶领域改进了多船避碰危险度评估模型. ...
船舶拟人智能避碰决策算法测试及应用
1
2022
... 智能航行是智能船舶主要功能模块之一,航行决策是其基础,相关研究成果丰富.文献[4 ]中设计了开阔水域多船会遇局面下的动态智能航行决策方法.文献[5 ]中提出考虑避障半径的斥力场函数方法,进一步优化了水下自主航行器在复杂环境下的规划路径.文献[6 ]中提出一种基于驾驶实践的无人船智能避碰决策方法.文献[7 ]中研究了基于双延迟深度确定性策略梯度的船舶自主避碰方法.文献[8 ]中论述船舶拟人智能避碰决策的算法原理及其基础模型的构建方法,提出避碰算法合理性及完备性的测试方案.文献[9 ]中设计了一种基于操纵过程推演的自主避碰决策支持模型.文献[10 ]中考虑目标船的不确定性,提出了一种时变碰撞风险模型.文献[11 ]中利用模型预测控制算法和模糊数学理论构建避碰算法的评价函数,实现了船舶自主避碰.文献[12 ]中基于Coldwell船舶领域改进了多船避碰危险度评估模型. ...
Testing and application of intelligent collision avoidance algorithm for ship personification
1
2022
... 智能航行是智能船舶主要功能模块之一,航行决策是其基础,相关研究成果丰富.文献[4 ]中设计了开阔水域多船会遇局面下的动态智能航行决策方法.文献[5 ]中提出考虑避障半径的斥力场函数方法,进一步优化了水下自主航行器在复杂环境下的规划路径.文献[6 ]中提出一种基于驾驶实践的无人船智能避碰决策方法.文献[7 ]中研究了基于双延迟深度确定性策略梯度的船舶自主避碰方法.文献[8 ]中论述船舶拟人智能避碰决策的算法原理及其基础模型的构建方法,提出避碰算法合理性及完备性的测试方案.文献[9 ]中设计了一种基于操纵过程推演的自主避碰决策支持模型.文献[10 ]中考虑目标船的不确定性,提出了一种时变碰撞风险模型.文献[11 ]中利用模型预测控制算法和模糊数学理论构建避碰算法的评价函数,实现了船舶自主避碰.文献[12 ]中基于Coldwell船舶领域改进了多船避碰危险度评估模型. ...
A novel decision support methodology for autonomous collision avoidance based on deduction of manoeuvring process
1
2022
... 智能航行是智能船舶主要功能模块之一,航行决策是其基础,相关研究成果丰富.文献[4 ]中设计了开阔水域多船会遇局面下的动态智能航行决策方法.文献[5 ]中提出考虑避障半径的斥力场函数方法,进一步优化了水下自主航行器在复杂环境下的规划路径.文献[6 ]中提出一种基于驾驶实践的无人船智能避碰决策方法.文献[7 ]中研究了基于双延迟深度确定性策略梯度的船舶自主避碰方法.文献[8 ]中论述船舶拟人智能避碰决策的算法原理及其基础模型的构建方法,提出避碰算法合理性及完备性的测试方案.文献[9 ]中设计了一种基于操纵过程推演的自主避碰决策支持模型.文献[10 ]中考虑目标船的不确定性,提出了一种时变碰撞风险模型.文献[11 ]中利用模型预测控制算法和模糊数学理论构建避碰算法的评价函数,实现了船舶自主避碰.文献[12 ]中基于Coldwell船舶领域改进了多船避碰危险度评估模型. ...
A rule-aware time-varying conflict risk measure for MASS considering maritime practice
1
2021
... 智能航行是智能船舶主要功能模块之一,航行决策是其基础,相关研究成果丰富.文献[4 ]中设计了开阔水域多船会遇局面下的动态智能航行决策方法.文献[5 ]中提出考虑避障半径的斥力场函数方法,进一步优化了水下自主航行器在复杂环境下的规划路径.文献[6 ]中提出一种基于驾驶实践的无人船智能避碰决策方法.文献[7 ]中研究了基于双延迟深度确定性策略梯度的船舶自主避碰方法.文献[8 ]中论述船舶拟人智能避碰决策的算法原理及其基础模型的构建方法,提出避碰算法合理性及完备性的测试方案.文献[9 ]中设计了一种基于操纵过程推演的自主避碰决策支持模型.文献[10 ]中考虑目标船的不确定性,提出了一种时变碰撞风险模型.文献[11 ]中利用模型预测控制算法和模糊数学理论构建避碰算法的评价函数,实现了船舶自主避碰.文献[12 ]中基于Coldwell船舶领域改进了多船避碰危险度评估模型. ...
基于模型预测控制的船舶自主避碰方法
1
2021
... 智能航行是智能船舶主要功能模块之一,航行决策是其基础,相关研究成果丰富.文献[4 ]中设计了开阔水域多船会遇局面下的动态智能航行决策方法.文献[5 ]中提出考虑避障半径的斥力场函数方法,进一步优化了水下自主航行器在复杂环境下的规划路径.文献[6 ]中提出一种基于驾驶实践的无人船智能避碰决策方法.文献[7 ]中研究了基于双延迟深度确定性策略梯度的船舶自主避碰方法.文献[8 ]中论述船舶拟人智能避碰决策的算法原理及其基础模型的构建方法,提出避碰算法合理性及完备性的测试方案.文献[9 ]中设计了一种基于操纵过程推演的自主避碰决策支持模型.文献[10 ]中考虑目标船的不确定性,提出了一种时变碰撞风险模型.文献[11 ]中利用模型预测控制算法和模糊数学理论构建避碰算法的评价函数,实现了船舶自主避碰.文献[12 ]中基于Coldwell船舶领域改进了多船避碰危险度评估模型. ...
Ship autonomous collision avoidance method based on model predictive control
1
2021
... 智能航行是智能船舶主要功能模块之一,航行决策是其基础,相关研究成果丰富.文献[4 ]中设计了开阔水域多船会遇局面下的动态智能航行决策方法.文献[5 ]中提出考虑避障半径的斥力场函数方法,进一步优化了水下自主航行器在复杂环境下的规划路径.文献[6 ]中提出一种基于驾驶实践的无人船智能避碰决策方法.文献[7 ]中研究了基于双延迟深度确定性策略梯度的船舶自主避碰方法.文献[8 ]中论述船舶拟人智能避碰决策的算法原理及其基础模型的构建方法,提出避碰算法合理性及完备性的测试方案.文献[9 ]中设计了一种基于操纵过程推演的自主避碰决策支持模型.文献[10 ]中考虑目标船的不确定性,提出了一种时变碰撞风险模型.文献[11 ]中利用模型预测控制算法和模糊数学理论构建避碰算法的评价函数,实现了船舶自主避碰.文献[12 ]中基于Coldwell船舶领域改进了多船避碰危险度评估模型. ...
基于船舶领域的碰撞危险度评估模型
1
2020
... 智能航行是智能船舶主要功能模块之一,航行决策是其基础,相关研究成果丰富.文献[4 ]中设计了开阔水域多船会遇局面下的动态智能航行决策方法.文献[5 ]中提出考虑避障半径的斥力场函数方法,进一步优化了水下自主航行器在复杂环境下的规划路径.文献[6 ]中提出一种基于驾驶实践的无人船智能避碰决策方法.文献[7 ]中研究了基于双延迟深度确定性策略梯度的船舶自主避碰方法.文献[8 ]中论述船舶拟人智能避碰决策的算法原理及其基础模型的构建方法,提出避碰算法合理性及完备性的测试方案.文献[9 ]中设计了一种基于操纵过程推演的自主避碰决策支持模型.文献[10 ]中考虑目标船的不确定性,提出了一种时变碰撞风险模型.文献[11 ]中利用模型预测控制算法和模糊数学理论构建避碰算法的评价函数,实现了船舶自主避碰.文献[12 ]中基于Coldwell船舶领域改进了多船避碰危险度评估模型. ...
Collision risk assessment model based on ship field
1
2020
... 智能航行是智能船舶主要功能模块之一,航行决策是其基础,相关研究成果丰富.文献[4 ]中设计了开阔水域多船会遇局面下的动态智能航行决策方法.文献[5 ]中提出考虑避障半径的斥力场函数方法,进一步优化了水下自主航行器在复杂环境下的规划路径.文献[6 ]中提出一种基于驾驶实践的无人船智能避碰决策方法.文献[7 ]中研究了基于双延迟深度确定性策略梯度的船舶自主避碰方法.文献[8 ]中论述船舶拟人智能避碰决策的算法原理及其基础模型的构建方法,提出避碰算法合理性及完备性的测试方案.文献[9 ]中设计了一种基于操纵过程推演的自主避碰决策支持模型.文献[10 ]中考虑目标船的不确定性,提出了一种时变碰撞风险模型.文献[11 ]中利用模型预测控制算法和模糊数学理论构建避碰算法的评价函数,实现了船舶自主避碰.文献[12 ]中基于Coldwell船舶领域改进了多船避碰危险度评估模型. ...
1
1998
... 现有航行决策研究大多集中于开阔水域,采取定速变向避让方法.在航道内单凭转向难以避让,需转向变速相结合.河口深槽水域航行规则多允许必要时利用航道外可航水域避让,因此可航宽度是变化的.此类水域航行决策研究缺乏,尚有以下关键科学问题亟待解决:① 按照航行决策的需要,建立包含各类要素的数字孪生环境模型;② 和航海实践一致,归纳、量化和融入《1972年国际海上避碰规则》、地方规则和良好船艺(合称“规则”)要求[13 ] ;③ 为保证决策方案可执行性,建立基于船舶非线性操纵特性的航向航速控制和运动过程预测方法;④ 考虑河口深槽水道特殊环境和船舶行为,探究本船变速运动下速度矢量和避让效果之间的规律(避碰机理).本文围绕这4个关键科学问题,基于现有船舶按车钟挡位的分挡航速控制方法,提出了此类水域能动态自适应剩余误差和目标船机动的航行决策方法. ...
1
1998
... 现有航行决策研究大多集中于开阔水域,采取定速变向避让方法.在航道内单凭转向难以避让,需转向变速相结合.河口深槽水域航行规则多允许必要时利用航道外可航水域避让,因此可航宽度是变化的.此类水域航行决策研究缺乏,尚有以下关键科学问题亟待解决:① 按照航行决策的需要,建立包含各类要素的数字孪生环境模型;② 和航海实践一致,归纳、量化和融入《1972年国际海上避碰规则》、地方规则和良好船艺(合称“规则”)要求[13 ] ;③ 为保证决策方案可执行性,建立基于船舶非线性操纵特性的航向航速控制和运动过程预测方法;④ 考虑河口深槽水道特殊环境和船舶行为,探究本船变速运动下速度矢量和避让效果之间的规律(避碰机理).本文围绕这4个关键科学问题,基于现有船舶按车钟挡位的分挡航速控制方法,提出了此类水域能动态自适应剩余误差和目标船机动的航行决策方法. ...
基于操纵过程推演的船舶可变速自动避碰决策方法
1
2021
... 为方便导助航仪器中经纬度信息和直角坐标转换,建立以 ( λ 0 , φ 0 ) x o y , X 、 Y 、 x y 轴正向指向正东、北、右正横和船首,N表示正北方向,如图2 所示.图中:T C 、 T C 1 T B 、 Q T B 1 、 Q 1 a、b、c 分别为椭圆船舶领域的长半轴、短半轴、偏移系数.转换关系见文献[14 ]. ...
Decision-making method of automatic collision avoidance for ships with variable speed based on maneuvering process inference
1
2021
... 为方便导助航仪器中经纬度信息和直角坐标转换,建立以 ( λ 0 , φ 0 ) x o y , X 、 Y 、 x y 轴正向指向正东、北、右正横和船首,N表示正北方向,如图2 所示.图中:T C 、 T C 1 T B 、 Q T B 1 、 Q 1 a、b、c 分别为椭圆船舶领域的长半轴、短半轴、偏移系数.转换关系见文献[14 ]. ...
基于AIS数据挖掘的受限水域船舶动态领域研究
1
2018
... 船舶领域为避免他船和静态物标进入的区域,用于衡量船舶间的安全性[15 ] .选取1艘7.6×104 t级满载散货船“华洋理想”作为实验本船,适用船舶领域种类及参数、后续部分参数需要根据船舶特性、航行环境取值.但对于某一特定船舶、环境,可由最熟悉该船的船长确定,研究中由课题组几位有丰富航海经验也多次航行于北槽水道的船长(作者曾任“华洋理想”船长)确定.结合规则,采用如图2 所示的椭圆船舶领域模型,取 a = 1.2 L , b = 0.3 L , c = 0.3 , L
Research on ship dynamics in restricted waters based on AIS data mining
1
2018
... 船舶领域为避免他船和静态物标进入的区域,用于衡量船舶间的安全性[15 ] .选取1艘7.6×104 t级满载散货船“华洋理想”作为实验本船,适用船舶领域种类及参数、后续部分参数需要根据船舶特性、航行环境取值.但对于某一特定船舶、环境,可由最熟悉该船的船长确定,研究中由课题组几位有丰富航海经验也多次航行于北槽水道的船长(作者曾任“华洋理想”船长)确定.结合规则,采用如图2 所示的椭圆船舶领域模型,取 a = 1.2 L , b = 0.3 L , c = 0.3 , L
Ship maneuvering performance prediction based on MMG model
1
2018
... 考虑到大型船舶操纵特性,该模型增加了推力随转速、航速变化的影响因子,考虑了风、流等外界干扰.模型参数计算及符号含义可参阅文献[16 ].可根据初始条件按龙格库塔方法求解任意时刻位置、航向等信息. ...
1
2021
... 风流求解公式和其他参数计算见文献[17 ]. ...
1
2021
... 风流求解公式和其他参数计算见文献[17 ]. ...
1
2007
... 传统PID参数可由二阶设计方法[18 -19 ] 给出: ...
1
2007
... 传统PID参数可由二阶设计方法[18 -19 ] 给出: ...
An effective and simple adaptive algorithm for ship course control systems
1
2019
... 传统PID参数可由二阶设计方法[18 -19 ] 给出: ...
Nonlinear closed loop optimal control: A modified state-dependent Riccati equation
1
2013
... 式中: E 为航向偏差;λ 为加权系数,其取值与风速大小相关;δ 为舵角.为使式(17)的二次型性能优化函数值最小,根据线性二次型非定点输出理论可解得舵角的控制律[20 ] : ...
1
2014
... 根据式(25)可通过水动力导数求出K、T 值,水动力导数与航速相关,具体计算方法详见文献[21 ].K、T 值是航速 v s K、T 值也是时变的,因此,提出的航向控制方法可自适应不同船舶和航速. ...
1
2014
... 根据式(25)可通过水动力导数求出K、T 值,水动力导数与航速相关,具体计算方法详见文献[21 ].K、T 值是航速 v s K、T 值也是时变的,因此,提出的航向控制方法可自适应不同船舶和航速. ...
基于航向控制系统的船舶动态避碰机理
1
2020
... 综上,提出的航向控制方法基于最优控制策略,适用于不同船舶以航速为自变量的PID航向控制方法,可实现不同航速下的航向自适应最优控制.控制流程见文献[22 ]. ...
Dynamic collision avoidance mechanism of ship based on course control system
1
2020
... 综上,提出的航向控制方法基于最优控制策略,适用于不同船舶以航速为自变量的PID航向控制方法,可实现不同航速下的航向自适应最优控制.控制流程见文献[22 ]. ...
成山角分道通航制水域航行风险辨识与操纵决策方法
1
2022
... 可暂时不考虑距离太远和离进入本船船舶领域时间长的目标船,距离小于阈值D d 时才推算一定时长的船位.D d 暂取4 n mile.判断目标船是否进入本船船舶领域,若进入,保存该目标船信息及进入时刻t ,判断公式[23 ] 如下: ...
A method of risk identification and decision-making support for ship maneuvers at Chengshanjiao waters under traffic separation scheme
1
2022
... 可暂时不考虑距离太远和离进入本船船舶领域时间长的目标船,距离小于阈值D d 时才推算一定时长的船位.D d 暂取4 n mile.判断目标船是否进入本船船舶领域,若进入,保存该目标船信息及进入时刻t ,判断公式[23 ] 如下: ...
基于改进人工势场法的船舶自动避碰研究
1
2021
... 碰撞危险度(CRI)是反映碰撞危险是否存在和采取避让措施紧迫程度的物理量.可分解为空间碰撞危险度(SCRI)和时间碰撞危险度(TCRI)[24 ] ,公式如下: ...
Research on ship automatic collision avoidance based on improved artificial potential field method
1
2021
... 碰撞危险度(CRI)是反映碰撞危险是否存在和采取避让措施紧迫程度的物理量.可分解为空间碰撞危险度(SCRI)和时间碰撞危险度(TCRI)[24 ] ,公式如下: ...
成山角水域动态自适应自主航行决策方法
2
2023
... (2) 时间碰撞危险度. TCRI是指两船存在碰撞危险时,目标船进入本船船舶领域、采取避让措施紧迫程度的物理量[25 ] .公式如下: ...
... 本船为长江口北槽水道中顺交通流方向行驶的机动船,规则要求应尽早避让特殊船舶(含操限船、失控船、非机动船、渔船和帆船等).根据河口深槽水域的特点,按照会遇局面确定两机动船的避让关系.为确定两船会遇局面,引入基于舷角比对的会遇局面辨识模型[25 ] .此外,规则规定河口深槽水域航行船舶航速不得超过15 kn,航道内平均航速应不低于10 kn,该条不免除或限制船长在任何时候采取安全航速的责任. ...
A dynamic adaptive autonomous navigation decision method for Chengshanjiao waters
2
2023
... (2) 时间碰撞危险度. TCRI是指两船存在碰撞危险时,目标船进入本船船舶领域、采取避让措施紧迫程度的物理量[25 ] .公式如下: ...
... 本船为长江口北槽水道中顺交通流方向行驶的机动船,规则要求应尽早避让特殊船舶(含操限船、失控船、非机动船、渔船和帆船等).根据河口深槽水域的特点,按照会遇局面确定两机动船的避让关系.为确定两船会遇局面,引入基于舷角比对的会遇局面辨识模型[25 ] .此外,规则规定河口深槽水域航行船舶航速不得超过15 kn,航道内平均航速应不低于10 kn,该条不免除或限制船长在任何时候采取安全航速的责任. ...







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}