仿人柔性关节因其独特的关节柔性而被广泛应用于工业生产、航空航天和交互服务等领域[1 -2 ] ,这对柔性关节的控制精度提出了更高要求.然而减速器和弹簧缸等弹性元件的引入降低了关节稳定性,系统极易在外部负载突变的干扰下引发振动问题,严重影响关节控制效果[3 -4 ] .因此,在负载变化的情况下有效解决关节振动问题,是提高仿人柔性关节控制效果的关键.
由于柔性关节是在电动机(以下简称电机)的驱动下实现指定动作,所以电机的驱动特性对关节的控制性能有重要影响.传统的建模方法通常只关注关节的机械特性,如Spong[5 ] 建立的柔性关节简化模型和Bridges等[6 ] 提出的具有摩擦项以及非线性项的模型均只考虑关节的力学因素,而将电机控制力矩视为系统外部力矩引入模型,无法体现柔性关节系统的机电耦合过程.为解决这一问题,Li等[7 ] 提出一种涵盖电机电气动力学的柔性关节动力学模型,建立电机输入电流、电压与电机输出转矩之间的简化模型,但该模型无法描述电机电磁耦合场的数学关系.Maiti等[8 ] 主要研究了刚性机器人关节系统的电气量与机械量的能量守恒问题,并构建了用于机器人开发的仿真模型,该模型不考虑关节柔性,且将系统电气部分和机械部分分开建模,难以设计有效的控制器结构.Ji等[9 ] 提出了控制器耦合问题,研究机电耦合对机器人控制精度的影响,但其分析方法仅针对双履带机器人,不具有普适性.文献[7 ⇓ -9 ]提出了机器人机电耦合的概念并分析了耦合影响,但未形成具体的建模方法.在此基础上,娄军强[10 ] 完善了耦合作用下关节驱动电机输入电流到输出转速的传递模型.鞠锦勇[11 ] 则进一步提出一种针对具有臂杆柔性的直角操作臂的机电耦合建模方法,虽然其模型不适用于仿人柔性关节系统,但是基于Lagrange-Maxwell方程的建模方法具有一定的普适意义.
早期对柔性关节振动抑制方法的研究多采用变刚度结构(VSA)的被动控制或附加传感器的主动控制[12 -13 ] ,这使关节结构复杂度增加、体积增大.目前则重点研究基于状态反馈的末端位置控制、阻抗控制、力矩反馈控制等方法.Liu等[14 ] 提出一种VSA力矩控制方法,通过调整输出力矩实现不同负载状况下的关节刚度变化;Yoo等[15 ] 提出一种采用观测器反馈连杆侧运动信息的关节力矩控制方法,通过补偿弹簧形变实现振动抑制.但这两类方法仅针对Kelly等[16 ] 提出基于重力矩补偿的比例-微分(PD)控制方法,解决了负载变化导致的手臂平衡位置偏差问题;Gupta等[17 ] 设计了轮式机器人的3级轨迹跟踪控制器,并采用模型逆运算实现对电机转矩的估算;Chen等[18 ] 设计了一种用于踝关节的力矩补偿比例-积分(PI)控制器,实现了不同倾角时的力矩稳定输出.虽然上述方法存在未考虑关节柔性、应用对象具有局限性以及仅考虑稳态误差而忽略动态性能等问题,但采用力矩补偿实现振动抑制的方法具有推广意义.实现力矩补偿控制的前提,是对外部扰动力矩进行精确估计,并准确跟踪系统状态变化.Song等[19 ] 提出一种采用负载力矩观测器估计电机输出转矩的方法,判断机械臂是否发生碰撞振动.Cui等[20 ] 则提出采用扩展状态观测器的方法,估计水下机器人的不可测量线速度和扰动力矩.Yabuki等[21 ] 提出一种基于瞬时状态观测器的关节加速度控制方法,采用状态反馈的积分-比例微分(I-PD)控制器实现对关节力矩的稳定控制.王漪梦等[22 ] 提出一种基于干扰观测器的扰动补偿方法,并设计双位置闭环控制器来提高机械臂跟踪精度.Cheng等[23 ] 提出一种利用非线性干扰观测器估计外部扰动的方法,并采用积分反步法设计关节跟踪控制器,提高了系统鲁棒性.这些研究成果为关节振动抑制提供了有效的状态跟踪和扰动估计方法.
针对关节复杂的机电耦合特性,建立了基于Lagrange-Maxwell方程的仿人柔性关节系统机电耦合模型,分析了关节柔性机理及负载变化时关节的振动机理;提出一种基于观测器的负载转矩补偿控制方法,并给出了负载变化后的电机期望转角增量控制方程.设计了估计电机输出转速和负载转矩的状态观测器,实现对期望转角计算过程中负载扰动转矩的准确测量;同时建立基于前馈补偿和比例积分-积分比例(PI-IP)转速调节器的关节驱动系统闭环控制结构,提高系统控制精度和抗干扰能力.
1 仿人柔性关节的物理结构与耦合模型
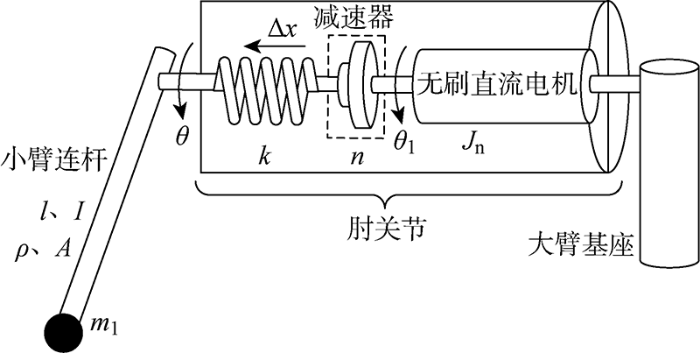
仿人机械臂的执行机构由肩关节、大臂、肘关节、小臂和腕关节等构成.以大臂为基座、小臂为执行机构,对肘部关节开展单关节变负载振动抑制的研究.图1 所示为仿人柔性关节机械臂的肘关节物理模型,主要包括无刷直流电机(BLDCM)、谐波减速器、弹性元件以及与肘关节相连接的小臂连杆.假定小臂绕连杆一端的轴旋转,且运动平面与电机输出轴方向垂直.图中,θ1 为柔性关节的电机输出转角;θ为手臂连杆的输出转角;n为减速器的减速比;k为关节刚度系数;Δ x为弹簧旋进量;Jn l
图1
图1
仿人柔性关节机械臂的肘关节物理模型
Fig.1
Physical model of elbow joint of humanoid flexible joint robotic arm
采用Lagrange-Maxwell方程对关节进行建模.通过构造关节驱动电机的磁场广义坐标,将驱动电机磁场能引入关节动力学方程中,进而建立控制量输入到机械量输出的完整机电耦合模型.定义系统的广义坐标如表1 所示.电磁部分包括BLDCM的三相定子电量和转子磁链,机械传动部分包括电机转角和手臂转角.表1 中,qa 、qb 和qc 为电机三相定子电量;ia 、ib 和ic 为三相定子绕组电流;ψ r 为转子磁链;Aj j =1, 2, 3, 4, 5)为广义坐标;Q j A j Fj 为与广义坐标相对应的坐标广义力;A · j θ · 1 θ · j θ 1 和θ 对时间t 的导数,后文中均以“ · t 的导数.
Lagrange-Maxwell方程的广义坐标形式[11 ,24 ] 如下:
(1) d d t ∂ L ∂ A · j - ∂ L ∂ A j ∂ H ∂ A · j Q j A
式中:L为Lagrange-Maxwell 算子;H 为系统耗散函数.算子L 的一般形式可以表示为
(2) L=T +W m -E p
式中:T为系统动能;Wm p
驱动与传动部分的动能Tdt arm p m BLDCM 的定子电流产生的磁能Wm 1 以及转子磁链与定子电流相互作用产生的磁能Wm 2 .式(2)中的各项可以表示为
T =T dt +T arm =1 2 J n θ · 1 2 1 2 J r 1 n θ · 1 2 1 6 ρ A l 2 + 1 2 m l θ · 2
(3) W m =W m1 +W m2 = 1 2 a i a 2 1 2 b i b 2 1 2 c i c 2 a ib +Mia ic +Mib ic +ia ψr (θ1 )+ib ψr θ 1 - 2 3 π c ψr θ 1 + 2 3 π
其中:Jr a 、Lb 和Lc 为电机三相绕组自感;M为三相绕组互感;ψr .BLDCM 的转子气隙磁场在定子表面呈梯形分布,当转子逆时针转动时,以a 相为基准,假设转子与a 相夹角为β ,则a 相磁链可以表示为
ψ r (β )=NS ∫ - π 2 + β π 2 + β B (θ 1 )dθ 1
其中:B (θ 1 )为转子磁体在气隙径向的磁密分布;N 为绕组匝数;S 为定子内表面绕组面积.a 相磁链ψ r (β )对时间t 求导即可得到a 相绕组反电动势ea ,同理可得b 、c 相绕组反电动势eb 、ec .
系统耗散能函数H主要包括电机绕组发热产生的耗散能He H θ 1 θ :
(4) H =H e + H θ 1 θ = 1 2 a i a 2 1 2 b i b 2 1 2 c i c 2 1 2 v θ · 1 2 1 2 f θ · 2
式中:Ra 、Rb 和Rc 为电枢绕组的等效电阻;Bv 为电机电磁阻尼系数;Df
(5) L = 1 2 n θ · 1 2 1 2 r 1 n θ · 1 2 1 6 ρ A l 2 + 1 2 m l θ · 2 1 2 a i a 2 1 2 b i b 2 1 2 c i c 2 a ib +Mia ic + Mib ic +ia ψr (θ1 )+ib ψr θ 1 - 2 3 π c ψr θ 1 + 2 3 π 1 2 1 n θ 1 - θ 2
由式(5)求解式(1)各项,取广义坐标为a相定子电量,即A1 =qa ,则有:
(6) ∂ L ∂ A 1 = ∂ L ∂ q a = 0 ∂ L ∂ A · 1 = ∂ L ∂ i a = L a i a + M i b + M i c + ψ r ( θ 1 ) d d t ∂ L ∂ A · 1 = L a d i a d t + M d i b d t + M d i c d t + e a ∂ H ∂ A · 1 = ∂ H ∂ i a = R a i a
对电机而言,非保守广义力分别对应电机三相电压ua 、ub 和uc ,即F 1 对应ua ,F 2 对应ub ,F 3 对应uc .所以将式(6)写作式(1)的形式,即可表示驱动电机a 相绕组电压方程,取广义坐标为b 和c 相的定子电量时,同理可得b 和c 相的电压方程:
(7) u a = L a d i a d t + M d i b d t + M d i c d t + R a i a + e a u b = L b d i b d t + M d i a d t + M d i c d t + e b + R b i b u c = L c d i c d t + M d i a d t + M d i b d t + e c + R c i c
与式(6)的推导过程相同,当广义坐标取电机输出转角θ 1 时,可以得到柔性关节系统驱动与传动部分的转矩方程:
(8) J n + 1 n 2 J r θ ¨ 1 a ψr (θ · 1 b ψr θ · 1 - 2 3 π c ψr θ · 1 + 2 3 π k n 1 n θ 1 - θ v θ · 1
式中:θ ¨ 1 J n + 1 n 2 J r θ ¨ 1
当广义坐标取手臂转角θ 时,同理可得手臂部分的运动方程:
(9) 1 3 ρ A l 2 + m l θ ¨ f θ · 1 n θ 1 - θ τ m l
式中:θ ¨ 1 3 ρ A l 2 + m l θ ¨ τ m l
(10) u a = L a d i a d t + M d i b d t + M d i c d t + R a i a + e a u b = L b d i b d t + M d i a d t + M d i c d t + e b + R b i b u c = L c d i c d t + M d i a d t + M d i b d t + e c + R c i c J n + 1 n 2 J r θ ¨ 1 - i a ψ r ( θ · 1 ) - i b ψ r θ · 1 - 2 3 π - i c ψ r θ · 1 + 2 3 π + k n 1 n θ 1 - θ + B v θ · 1 = 0 1 3 ρ A l 2 + m l θ ¨ + D f θ · - k 1 n θ 1 - θ = τ m l
该模型包括输入电流建立的磁场电气方程以及关节驱动力矩带动手臂运动的机械方程,完整描述了关节系统机电耦合过程.模型式(10)中第4和第5个方程描述了柔性关节的动力学特性.用τ e 等效替换模型中的驱动电机电磁力项,可以得到简化的关节动力学方程:
(11) J n + 1 n 2 J r θ ¨ 1 + k n 1 n θ 1 - θ + B v θ · 1 = τ e 1 3 ρ A l 2 + m l θ ¨ + D f θ · - k 1 n θ 1 - θ = τ m l
(1) 弹性元件的引入使手臂转角滞后于减速器输出转角,电机的输出动能转化为弹簧的弹性势能,且这部分能量在为手臂连杆提供驱动力矩的同时,减缓了手臂对电机输出的响应速度,实现了近似柔性.
(2) 手臂的运动状态同时受到负载重力矩和关节弹性力矩的影响,负载力矩的变化将使关节运动产生加速力矩,同时受运动惯性影响,关节的加速运动又将进一步改变关节弹性力矩,进而引起系统振动.如果此时电机输出转矩不能主动调整关节运动状态,手臂将呈现出与弹性元件相似的二阶振荡状态.
综上所述,在负载力矩变化打破系统力矩平衡状态后,所引起的关节加速运动与关节弹性的相互作用是导致关节产生振动现象的主要原因.
2 基于状态观测器的负载转矩补偿控制
关节弹性力矩对负载力矩变化的被动适应过程是造成关节振动的核心原因.提出一种负载力矩补偿控制方法,通过电动机输出与负载力矩变化量等值的转矩增量,实现对关节弹性力矩的主动调节,使关节力矩能够快速平衡变化后的负载力矩,缩短振动过程.
2.1 控制方程设计
根据式(9)已知,当手臂处于匀速运动时,手臂转角加速度θ ¨
(12) Df θ · 1 n θ 1 - θ τ m l
当产生负载力矩增量Δ τ m l θ ¨ Δ θ=0.因此,期望的手臂运动方程表示为
(13) Df θ · k 1 n θ 1 - θ + Δ τ k τ m l τ m l
式中:Δτ k 为应对负载变化而产生的转矩弹簧弹性力矩增量.式(13)表明,负载变化后在系统新的力矩平衡过程中,弹簧的弹性力矩变化量可直接抵消负载力矩的变化,从而避免由负载力矩变化导致的连杆加速力矩的动态平衡过程,实现避免手臂抖动的目的.
由式(11)已知,弹簧弹性力矩同时受手臂末端负载和电机输出端的影响,若令Δθ =0,则Δτ k 完全由电机输出转角增量提供,表示为
(14) Δ τk Δ θ 1 n τ m l
式中:Δθ 1 为驱动电机输出转角的增量;Δθ 1 /n 为电机经减速器后的输出转角增量.
(15) Df θ · 1 n θ 1 + 1 n Δ θ 1 - θ τ m l τ m l
根据式(15),已知负载转矩增量Δτ m l θ 1 ,并将其作为给定信号控制驱动电机.当关节负载发生突变时,电机输出的转角增量Δθ 1 能够使关节产生弹性力矩增量Δτ k ,而根据式(14)已知,Δτ k 与Δτ m l θ 的情况下,驱动电机通过主动输出Δθ 1 ,实现对关节力矩的调整,使关节力矩能够快速平衡变化后的负载力矩.
该方法理论上可以在维持手臂连杆转动角度和角加速度不变的情况下,使变负载系统达到新的平衡,并且在负载突变引起的手臂稳态情况下,避免角加速度的突变和转矩弹簧不可控的阻尼振荡,进而抑制负载突变时柔性关节机械臂的振动问题.
2.2 观测器设计
根据方程式(15)可知,为了计算期望的电机转角增量Δθ 1 ,需要在负载突变后获取准确的电机负载转矩值和实际输出转速值.设计合理的转速、转矩观测器能够有效避免因关节内部空间小而导致的检测困难、检测精度低的问题.
(16) τe n d ω d t v ω+τL
(17) x · = A x + B u y = C x
A =- B v J n - 1 J n 0 0 B =1 J n 0 T C =1 0 .
(18) x ^ · A x ^ y ^
(19) y ^ C x ^
式中:“^ ”为对应量的估计值;Z =z 1 z 2 T
根据式(17)和(19),观测器方程式(18)可以改写为
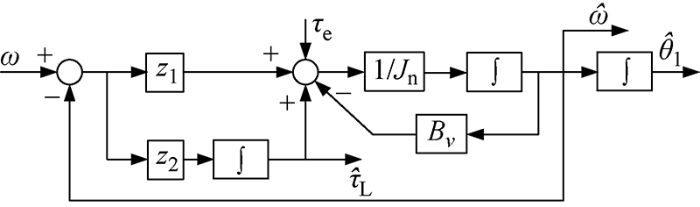
(20) ω ^ · τ ^ · L - B v J n ω ^ - 1 J n τ ^ L + 1 J n τ e + z 1 ( ω - ω ^ ) z 2 ( ω - ω ^ )
根据式(20),观测器的物理结构如图2 所示.图2 中,∫表示对输入信号进行积分.
图2
图2
状态观测器结构
Fig.2
Structure of state observer
定义状态误差x ~ x ^ ω ~ ω ^ τ ~ L L τ ^ L . 由式(17)~(19)可得 x ~ · A x ~ - Z C x ~ A -ZC )x ~
(21) ω ~ · τ ~ · L - B v J n - z 1 - 1 J n - z 2 0 ω ~ τ ~ L
(22) V (x ~ x ~ T P x ~
(23) V · x ~ x ~ · T P x ~ x ~ T x ~ · ( A - Z C ) x ~ T P x ~ x ~ T ( A - Z C ) x ~ x ~ T ( A - Z C ) T P + P ( A - Z C ) x ~
由于矩阵P 正定,则V (x ~ ) 正定.若要求观测器的状态观测误差收敛至0,则需要V · ( x ~ ) 负定,即选取合适的矩阵Z ,使矩阵(A -ZC )T P +P (A -ZC )负定.令:
(24) (A -ZC )T P +P (A -ZC )=-Q
式中:Q 为正定对称矩阵,取Q =1 0 0 1 P =p 11 p 12 p 21 p 22 p 12 =p 21 .则有
(25) (A -ZC )T P +P (A -ZC )= a 11 a 12 a 21 a 22 - 1 0 0 - 1
a 11 =-2p 11 B v J n + z 1 - z 2 (p 12 +p 21 )
a 12 =-p 11 1 J n - B v J n + z 1 p 12 -z 2 p 22
a 21 =-p 11 1 J n - B v J n + z 1 p 21 -z 2 p 22
(26) P = 1 - J n z 2 2 B v J n + z 1 J n 2 J n 2 - ( J n z 1 + B v ) 2 + ( 1 - J n z 2 ) 2 z 2 ( B v + J n z 1 )
如式(26)所示,通过选取合适的增益矩阵Z ,可以找到对称正定矩阵P ,使V (x ~ ) 正定,且V · ( x ~ ) 负定.此时,状态观测器是渐进稳定的,即观测器的输出x ~ x .根据式(21)可知系统的极点为
s1,2 =-1 2 B v J n + z 1 1 2 B v J n + z 1 2 + 4 z 2 J n
当极点位于复频域的左半平面时系统稳定,令s1 =s2 =v,v是任意给定的正实数,则有z1 =2v-B v J n 2 =-Jn 2 . v的大小决定了估计值的收敛速度.
2.3 转速调节器设计
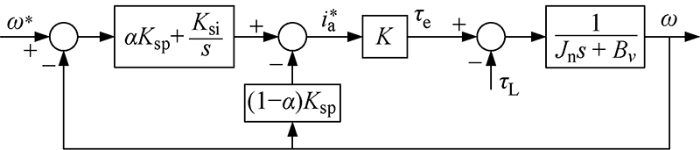
在得到负载转矩增量并计算出期望的电机转角增量后,转速调节器将给定的增量信号输出为电机的控制信号.IP控制器是PI控制器的一种改型.根据文献[25 -26 ],在采用相同的控制器参数时,IP控制器相较于PI控制器具有更大的带宽和更小的超调量,但在跟踪连续变化的输入信号时,PI控制器具有更小的跟踪误差.因此,综合利用PI和IP控制器的优势,采用PI-IP控制器作为转速调节器的主要结构.PI-IP控制器的结构如图3 所示.图3 中,ω* 为给定转速;i a * K sp 和K si 分别为调节器的比例系数和积分系数;K 为转矩系数,当忽略电枢感应和其他因素时,可以认为直流电机的输出转矩与电枢电流成正比.混合因数α ∈[0,1 ]为PI控制器和IP控制器的混合因子,当α = 1时,转速调节器为PI调节器;当α = 0时,转速调节器为IP调节器.所以,当α 减小时,会增强IP控制器的控制作用,能够有效降低响应超调;当α 增大时,PI控制器的控制作用会有所增强,可以减小跟踪误差.
图3
图3
PI-IP控制器结构
Fig.3
Structure of PI-IP controller
(27) ω ( s ) ω * ( s ) K ( α K s p s + K s i ) J n s 2 + ( B v + K K s p ) s + K K s i
将图3 做等效替换可以得到图4 .根据图4 ,给定转速信号在经过低通滤波环节的优化后输入到闭环调节器,而负载转矩的响应通过闭环调节器得到调节.因此,PI-IP控制器可以同时提高信号的跟踪能力和抗干扰能力.
图4
图4
PI-IP控制器的等效结构
Fig.4
Equivalent structure of PI-IP controller
综上所述,混合因数α 的引入使控制系统更灵活应对仿人柔性关节系统复杂的控制要求,通过选择合适的α 值可以调节PI和IP控制器的占比,进而获得期望的动态性能.而且,PI-IP控制器抗干扰能力强、跟踪精度高、结构简单稳定性好,不会给控制系统带来额外的不利因素,适用于仿人柔性关节系统.
2.4 控制器结构设计
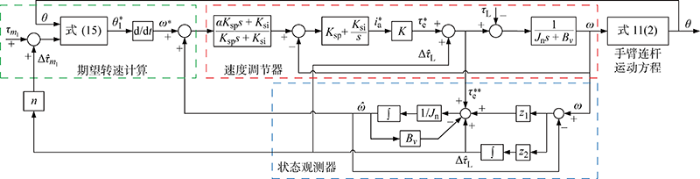
根据前述分析,给出柔性关节驱动系统控制器结构框图,如图5 所示.图5 中,状态观测器环节用于观测负载扰动转矩,因此,将扰动观测器的前馈输入量由参考转矩τ e * τ e * * τ e * τ ^ L n .
图5
图5
关节驱动系统控制框图
Fig.5
Control block diagram of joint drive system
图5 所示的控制器结构由PI-IP转速调节器实现电机调速;由状态观测器对电机输出转速及电机负载扰动转矩进行估计,并将转矩估计值代入到方程式(15)中,计算负载变化后的期望转角增量;计算得到的期望转速先与观测器得到的转速估计值进行比较,再将比较值经过低通滤波器处理后与转速实际值进行比较,有助于提高转速调节精度.同时,将观测得到的扰动转矩估计值反馈到转速调节器中,有助于提高系统的抗干扰能力.此外,图5 中的式11(2)指式(11)中的第二个方程,其为手臂连杆的运动方程.
3 仿真与实验验证
为了验证所提方法的有效性,根据图5 所示控制系统结构搭建仿真模型,分别对观测器的跟踪效果、控制器的调节能力进行仿真验证.关节硬件参数如表2 所示.
3.1 扰动观测器仿真
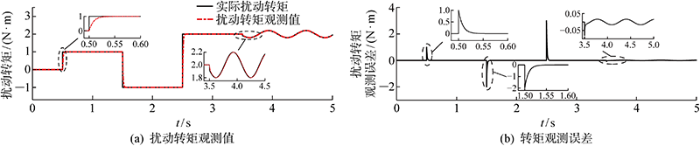
扰动观测器对扰动转矩和电机转速的跟踪效果决定了期望转角增量计算的准确性.在图5 控制器结构的模型基础上去掉闭环反馈,以凸显负载变化时观测器对电机转速变化的跟踪效果.将电机端负载转矩变化量看作扰动转矩,定义与关节运动方向相反的负载力矩为正,与关节运动方向相同的负载力矩为负,输出观测器估计转矩值和估计转速值.取观测器增益矩阵为Z =[56.8 -55.8]T ,并设定仿真场景:驱动电机从启动加速到额定转速,在0.5 s时,负载转矩由0上升至1 N·m,1.5 s时负载转矩下降至-1 N·m,2.5 s时负载转矩上升至2 N·m,3.5 s时负载转矩取幅值为0.2 N·m,周期为0.2π的正弦扰动信号.
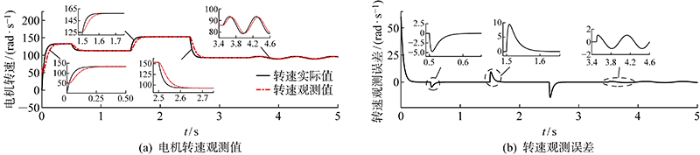
图6 为扰动转矩观测值与转矩观测误差值曲线.当负载转矩发生阶跃变化时,观测器估计转矩值可在0.035 s内完成对转矩变化的跟踪,观测误差在短暂的增大后迅速收敛到0;当负载转矩发生周期性正弦波动时,观测输出与实际变化之间存在最大约0.01 s的延时,最大观测误差出现在扰动转矩突变的瞬间,约为-0.075 N·m,随后观测误差迅速衰减并保持在 ±0.02 N·m左右.图7 为负载转矩变化时相应的电机转速观测曲线与转速观测误差曲线,纵坐标换算为电机角速度.在开环控制下,当负载转矩变化时,电机输出转速随之发生变化.当负载呈现阶跃变化时,观测器对电机转速的观测误差可在0.08 s内收敛到0,实现对转速实际值的跟踪;当负载呈现正弦趋势变化时,实际转速值周期性波动,观测器输出转速估计值与实际输出转速之间存在最大约0.04 s的延迟时间,且观测误差保持在 ±1 rad·s-1 左右. 仿真结果表明, 观测器具有快速跟踪扰动转矩值和电机转速值的能力.
图6
图6
扰动转矩观测值及观测误差
Fig.6
Observed value and observation error of disturbance torque
图7
图7
电机转速观测值及观测误差
Fig.7
Observed value and observation error of motor speed
3.2 转矩增量补偿控制方法仿真
利用MATLAB/Simulink搭建了柔性关节控制系统模型,分别对转速反馈定值比例积分微分(PID)控制、关节力反馈PD控制以及基于转矩观测补偿的PI-IP控制方法进行仿真对比,系统参数如表2 所示.关节力反馈PD控制是根据关节弹性力矩反馈值设计的控制律,电机输出的控制力矩为τm p v e · p v k m θ ¨ 1 τ B v - τm k θ - θ 1 / n τ B v v θ · 1 m n r 2 为关节总惯量,表示为电机惯量与减速器惯量之和.力反馈PD控制相比于传统的转速反馈PID控制,具有更好的应对关节力矩突变的能力,且控制器不含积分项,具有更小的超调量和稳态误差,因此将该方法作为对比方法之一.
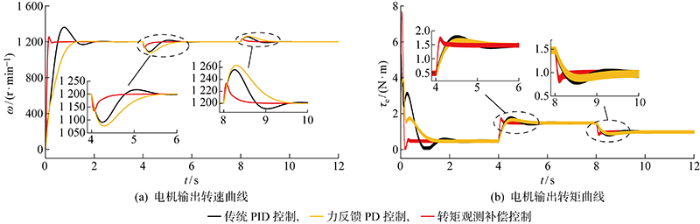
PID控制器参数取比例系数为10,积分系数为0.1,微分系数为0.5;PD控制器参数取比例系数和开环增益均为10;PI-IP调节器参数取比例系数为10,积分系数为0.1,α =0.5;观测器增益矩阵取Z =[56.8-55.8]T .设定仿真场景:电机初始负载力矩为0.5 N·m,在4 s时增大至1.5 N·m,在8 s时减小至1 N·m.容许误差为2%,观察电机输出转速、转矩以及关节轨迹的变化趋势.
电机输出转速和转矩曲线如图8 所示.由图8(a) 可知,当负载力矩发生变化时,传统PID控制下的电机转速产生了最大约100 r/min的波动,并在约2.3 s内恢复对给定转速的跟踪;力反馈PD控制下的电机输出转速,在负载力矩发生变化时产生了最大约130 r/min的波动,并在约1.45 s内恢复对给定转速的跟踪;转矩观测补偿控制下的电机转速,在负载力矩变化时产生了最大约65 r/min的转速波动,并在约0.6 s内恢复对给定转速的跟踪.相比之下,转矩补偿控制下的电机输出具有更短的转速调节时间和更小的转速波动.由图8(b) 可知,3种控制方法均能实现对负载力矩变化的跟踪,PID控制和力反馈PD控制下的系统力矩调节时间分别约为1.7 s 和1.5 s,而转矩补偿控制下的力矩调节时间约为0.5 s,因此转矩补偿控制具有更快跟踪负载力矩的能力.同时,在电机启动过程中,若忽略观测器的延迟时间,观测器观测到的初始扰动转矩等于负载力矩本身,启动时会产生较大的期望转角值,进而产生较大的启动转矩超调量.
图8
图8
驱动电机输出曲线
Fig.8
Output curve of drive motor
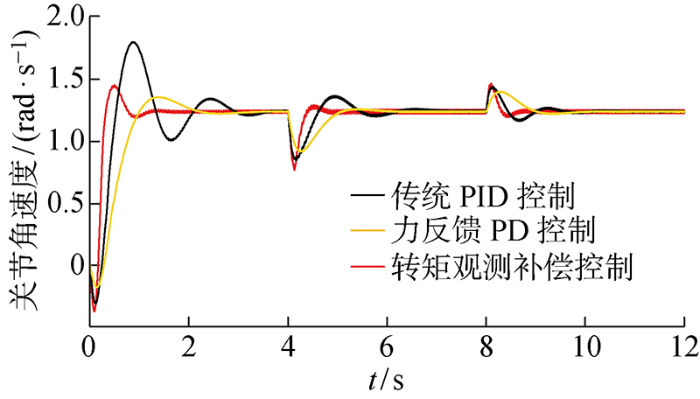
关节角速度曲线如图9 所示.对比图8(a) ,由于弹性元件将部分电机转子动能转化为弹性势能,所以关节的响应速度略滞后于电机的响应速度,验证了前文模型对关节柔性的描述.当负载力矩发生变化时,PID控制下的关节转速调节时间约为2.8 s,力反馈PD控制下的关节转速调节时间约为1.9 s,转矩补偿控制下的关节转速调节时间约为1 s.相比之下,本文提出的控制方法可以有效抑制因负载变化引起的关节振动,并且具有更短的调节时间.
图9
图9
关节角速度曲线
Fig.9
Curve of joint angular velocity
3.3 转矩增量补偿方法实验分析
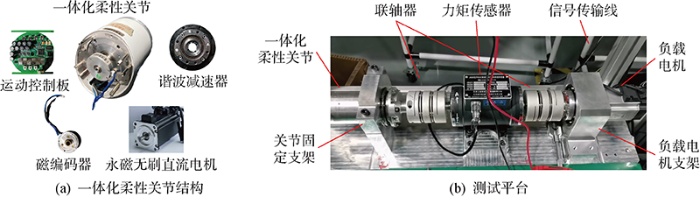
为了验证所提负载转矩增量补偿控制方法在实际柔性关节运动控制中的有效性,在含有一体化柔性关节的测试平台上进行实验.一体化柔性关节的硬件结构如图10(a) 所示,实验测试平台如图10(b) 所示.
图10
图10
实验设备现场
Fig.10
Site of experimental equipment
在图10(a) 中,关节驱动电机采用额定电压为48 V、额定输出转矩为0.3 N·m、额定转速为 1000 r/min、额定功率为100 W的永磁无刷直流电机;减速器采用减速比为100∶1的谐波减速器;磁编码器采集关节及电机转子的位置信号;运动控制板根据反馈信号计算电机期望转角和估计负载扰动力矩值,并输出电机驱动信号.
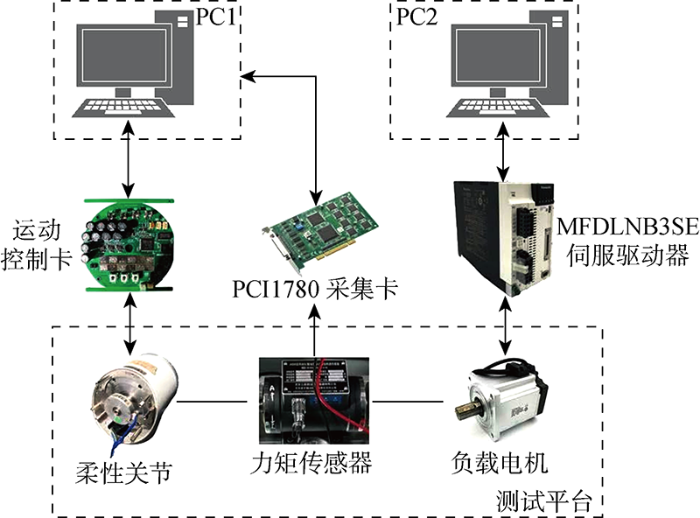
在图10(b) 中,实验测试平台左侧为安装了固定外壳和固定支架的一体化柔性关节,右侧采用松下 1000 W 低惯量伺服电机MSMF作为负载电机,并采用配套的A6SE系列的MFDLNB3SE伺服驱动器进行驱动控制.实验中,通过调节负载侧伺服电机模拟柔性关节系统的负载力矩突变.柔性关节与负载电机之间安装有0~100 N·m的应变片式力矩传感器,其输出的关节力矩信号通过PCI1780数据采集卡传输至计算机端,观测关节输出转矩跟随负载力矩变化的调节过程.图11 所示为实验平台的结构示意图.
图11
图11
实验平台结构示意图
Fig.11
Schematic diagram of experimental platform
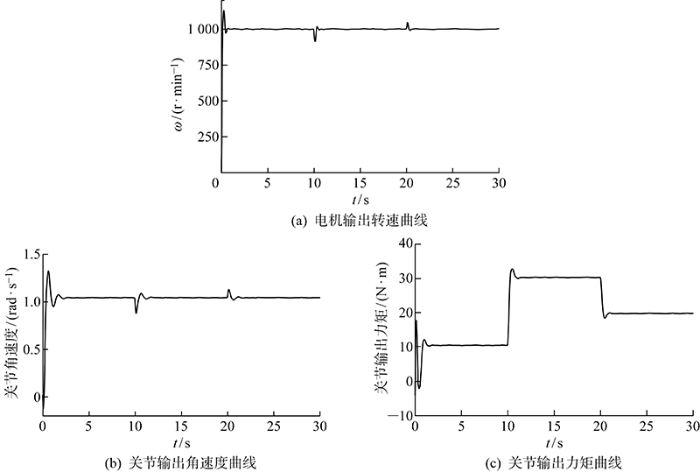
测试时关节电机经启动达到额定转速,负载电机初始输出力矩为10 N·m,在10 s时将负载电机输出力矩调整为30 N·m,在20 s时将负载电机输出力矩调整为20 N·m.
图12 为关节驱动电机转速、关节输出端角速度和关节输出力矩曲线.图12(a)和12(b) 表明,在额定情况下,驱动电机和关节输出角速度可以有效跟踪给定信号;随着在10 s和20 s处的负载力矩发生变化,关节角速度和电机转速产生波动,但可以看出负载变化并没有引起系统的长时间振动,电机转速在0.8 s内恢复稳定,而关节角速度的波动在1.4 s内得到有效抑制.图12(c) 表明,在转矩补偿控制的作用下,关节输出转矩可以在1 s内实现对负载力矩的有效跟踪,且调节过程中振动幅度小、跟踪精度高.实验结果证明所提出的转矩观测补偿控制方法能够有效应对负载突变引起的关节振动问题,且实验结果与仿真结果具有一致性.
图12
图12
负载力矩变化时的转矩补偿控制方法实验结果
Fig.12
Experimental results of torque compensation control method at variation in load torque
4 结论
研究仿人柔性关节变负载情况下的振动问题,主要结论如下:
(1) 基于Lagrange-Maxwell方程构建了仿人柔性关节系统的机电耦合模型.该模型通过定义驱动电机电磁项为系统广义坐标,解决了传统动力学建模只能将电机电磁力矩作为外力矩引入模型的问题.基于模型分析了关节柔性机理与负载变化后的关节振动机理.分析认为,负载力矩的突变会导致关节产生加速力矩并进一步改变关节弹性力矩,而弹性力矩对负载力矩的被动适应过程是引发关节振动的核心原因.
(2) 针对负载变化导致关节振动的问题,提出一种基于观测器的转矩补偿控制方法.该方法以负载变化后手臂零加速度、零转角增量为期望控制目标,构建驱动电机转角增量控制方程,并通过控制驱动电机输出转角增量来主动调节关节弹性力矩,从而实现对关节振荡过程的主动抑制.为了准确计算负载转矩增量所对应的驱动电机转角增量,设计了用于估计负载转矩增量和电机输出转速的状态观测器,并利用Lyapunov稳定性原理给出了观测器增益矩阵的整定方法;设计了基于PI-IP调节器的关节驱动系统闭环控制结构,并将扰动力矩的观测结果前馈输入到驱动电机的参考转矩中,以提高系统控制精度和抗干扰能力.
(3) 仿真结果表明,本文设计的状态观测器能够快速有效跟踪负载力矩变化引起的系统状态变化,与定值PID控制和关节力反馈PD控制相比,转矩观测补偿控制下的电机转速调节时间分别降低了1.7、0.85 s,关节转速的调节时间分别降低了约1.8、0.9 s,关节振动在1 s内得到有效抑制,提高了系统动态调节能力.最后通过实验验证了该方法在实际柔性关节中的控制效果,结果表明转矩观测补偿控制方法能够有效应对负载变化时引起的关节振动问题.
参考文献
View Option
[1]
ASFOUR T KAUL L WÄCHTER M et al ARMAR-6: A collaborative humanoid robot for industrial environments[C]//2018 IEEE-RAS 18th International Conference on Humanoid Robots
Beijing, China: IEEE , 2018 : 447 -454 .
[本文引用: 2]
[2]
JIANG Z H XU J F LI H et al Stable parking control of a robot astronaut in a space station based on human dynamics
[J]. IEEE Transactions on Robotics , 2020 , 36 (2 ): 399 -413 .
DOI:10.1109/TRO.8860
URL
[本文引用: 1]
[3]
ITO K IWASAKI M State feedback-based vibration suppression for multi-axis industrial robot with posture change[C]//IECON 2016-42nd Annual Conference of the IEEE Industrial Electronics Society
Florence, Italy: IEEE , 2016 : 5119 -5124 .
[本文引用: 1]
[4]
GUO C Q GAO H B NI F L et al A vibration suppression method for flexible joints manipulator based on trajectory optimization[C]//2016 IEEE International Conference on Mechatronics and Automation
Harbin, China: IEEE , 2016 : 338 -343 .
[本文引用: 1]
[5]
SPONG M W Modeling and control of elastic joint robots
[J]. Journal of Dynamic Systems, Measurement, and Control , 1987 , 109 (4 ): 310 -318 .
DOI:10.1115/1.3143860
URL
[本文引用: 1]
In this paper we study the modeling and control of robot manipulators with elastic joints. We first derive a simple model to represent the dynamics of elastic joint manipulators. The model is derived under two assumptions regarding dynamic coupling between the actuators and the links, and is useful for cases where the elasticity in the joints is of greater significance than gyroscopic interactions between the motors and links. In the limit as the joint stiffness tends to infinity, our model reduces to the usual rigid model found in the literature, showing the reasonableness of our modeling assumptions. We show that our model is significantly more tractable with regard to controller design than previous nonlinear models that have been used to model elastic joint manipulators. Specifically, the nonlinear equations of motion that we derive are shown to be globally linearizable by diffeomorphic coordinate transformation and nonlinear static state feedback, a result that does not hold for previously derived models of elastic joint manipulators. We also detail an alternate approach to nonlinear control based on a singular perturbation formulation of the equations of motion and the concept of integral manifold. We show that by a suitable nonlinear feedback, the manifold in state space which describes the dynamics of the rigid manipulator, that is, the manipulator without joint elasticity, can be made invariant under solutions of the elastic joint system. The implications of this result for the control of elastic joint robots are discussed.
[6]
BRIDGES M M DAWSON D M Redesign of robust controllers for rigid-link flexible-joint robotic manipulators actuated with harmonic drive gearing
[J]. IEE Proceedings-Control Theory and Applications , 1995 , 142 (5 ): 508 -514 .
DOI:10.1049/ip-cta:19951970
URL
[本文引用: 1]
[8]
MAITI T K OCHI Y MIURA-MATTAUSCH M et al Modeling of multi-dimensional system and its application for robot development[C]//2018 International Symposium on Devices, Circuits and Systems
Howrah, India: IEEE , 2018 : 1 -4 .
[本文引用: 2]
[9]
JI P LI S XU M J et al Design of sliding cloud-model cross coupling controller for tracked mobile robot[C]//2018 37th Chinese Control Conference
Wuhan, China: IEEE , 2018 : 5353 -5357 .
[本文引用: 2]
[10]
娄军强 . 基于压电致动器的空间柔性机械臂系统的轨迹跟踪与振动抑制一体化控制研究 [D]. 杭州 : 浙江大学 , 2013 .
[本文引用: 1]
LOU Junqiang Research on integrated control of trajectory tracking and vibration suppression of a space flexible manipulator system using piezoelectric actuators [D]. Hangzhou : Zhejiang University , 2013 .
[本文引用: 1]
[11]
鞠锦勇 . 移动柔性操作臂系统机电耦合动力学特性及振动控制研究 [D]. 徐州 : 中国矿业大学 , 2018 .
[本文引用: 2]
JU Jinyong Research on electromechanical-coupling dynamic and vibration control of the translational flexible manipulator system [D]. Xuzhou : China University of Mining and Technology , 2018 .
[本文引用: 2]
[12]
WU Y S LAN C C Design of a linear variable-stiffness mechanism using preloaded bistable beams[C]//2014 IEEE/ASME International Conference on Advanced Intelligent Mechatronics
Besacon, France: IEEE , 2014 : 605 -610 .
[本文引用: 1]
[13]
郭闯强 , 倪风雷 , 孙敬颋 , 等 . 具有力矩传感器的柔性关节的振动抑制
[J]. 机器人 , 2011 , 33 (4 ): 449 -454 .
[本文引用: 1]
针对具有谐波减速器的柔性关节机器人容易产生振动的问题,设计了一种轮辐式力矩传感器.该力矩传感器安装于谐波减速器输出端和机器人臂杆之间,用于反馈机械臂反作用于关节的扭转力矩,从而能够直接获得关节的振动状态信息.基于该力矩传感器信息和计算的关节名义输出力矩,提出了一种新的振动抑制方法,在传统力矩负反馈PD控制器基础上通过增加名义输出力矩前馈补偿,实现了振动的快速抑制.建立了单关节控制实验平台,并进行了梯形轨迹跟踪振动抑制实验.实验结果表明:本文所提出的控制器不但能够快速抑制关节振动,而且不影响轨迹跟踪精度,从而解决了传统力矩负反馈PD控制器不能同时兼顾振动抑制效果和轨迹跟踪精度的问题.
GUO Chuangqiang NI Fenglei SUN Jingting et al Vibration suppression for the flexible joint with torque sensor
[J]. Robot , 2011 , 33 (4 ): 449 -454 .
[本文引用: 1]
A spoke-type torque sensor mounted between the output of harmonic reducer and the link of robot is developed to control the vibration of flexible joint with harmonic reducer.The torque sensor is used to feed back the reaction torque exerted on the joint by the robot arm,and thereby obtain the vibration state information of the flexible joint directly.An approach to vibration suppression,which is capable of reducing the vibration quickly by means of adding a feed-forward compensation of nominal output torque to the conventional PD controller plus torque negative feedback,is proposed based on the feedback information from the designed torque sensor and the calculated nominal output torque of the joint.A series of vibration suppression experiments for tracking trapezoidal trajectories are carried out on an experimental platform newly designed for single joint control.The experimental results show that this approach can suppress the joint vibration quickly with a high degree of trajectory tracking precision.Hence,the difficulty that traditional PD controller plus torque negative feedback can't take into account both the effect of vibration suppression and the precision of trajectory tracking will be overcome by using the controller proposed.
[14]
LIU L LEONHARDT S NGO C et al Impedance-controlled variable stiffness actuator for lower limb robot applications
[J]. IEEE Transactions on Automation Science and Engineering , 2020 , 17 (2 ): 991 -1004 .
DOI:10.1109/TASE.8856
URL
[本文引用: 1]
[15]
YOO S CHUNG W K Link motion feedback based force/torque servo control of robot joint with series elasticity[C]//2015 12th International Conference on Ubiquitous Robots and Ambient Intelligence
Goyangi, Korea (South): IEEE , 2015 : 133 -134 .
[本文引用: 1]
[16]
KELLY R MONROY C On robustness of PD control with gravity compensation of torque-driven robot manipulators[C]// 2019 International Conference on Control, Automation and Diagnosis.
Grenoble, France: IEEE , 2019 : 1 -5 .
[本文引用: 1]
[17]
GUPTA V BENDAPUDI N KAR I N et al Three-stage computed-torque controller for trajectory tracking in non-holonomic wheeled mobile robot [C]//2018 IEEE 15th International Workshop on Advanced Motion Control
Tokyo, Japan: IEEE , 2018 : 144 -149 .
[本文引用: 1]
[18]
CHEN C J YEH S S Torque-compensated motion control design for a mobile robot moving on ground with ill-conditioned road situations[C]//2016 2nd International Conference on Control, Automation and Robotics
Hong Kong, China: IEEE , 2016 : 38 -43 .
[本文引用: 1]
[19]
SONG Y Y XIAO X XU W Z Sensorless collision detection for robots based on load torque observer[C]//2019 22nd International Conference on Electrical Machines and Systems
Harbin, China: IEEE , 2019 : 1 -5 .
[本文引用: 1]
[20]
CUI R X CHEN L P YANG C G et al Extended state observer-based integral sliding mode control for an underwater robot with unknown disturbances and uncertain nonlinearities
[J]. IEEE Transactions on Industrial Electronics , 2017 , 64 (8 ): 6785 -6795 .
DOI:10.1109/TIE.41
URL
[本文引用: 1]
[21]
YABUKI A OHISHI K MIYAZAKI T et al Design method of I-PD force control system based on instantaneous state observer for industrial robot[C]// 2016 IEEE 14th International Workshop on Advanced Motion Control
Auckland, New Zealand: IEEE , 2016 : 91 -96 .
[本文引用: 1]
[22]
王漪梦 , 吴斌 , 周挺 . 基于干扰观测器的空间机械臂柔性关节振动抑制
[J]. 自动化与仪器仪表 , 2019 (3 ): 147 -150 .
[本文引用: 1]
WANG Yimeng WU Bin ZHOU Ting Vibration suppression for the space manipulator flexible joint based on disturbance observer
[J]. Automation & Instrumentation , 2019 (3 ): 147 -150 .
[本文引用: 1]
[23]
CHENG W L ZHANG Z C WU Y Q Disturbance-observer-based tracking control for a flexible-joint robotic manipulator with external disturbance[C]// 2020 Chinese Control and Decision Conference
Hefei, China: IEEE 2020 : 3406 -3409 .
[本文引用: 1]
[24]
JU J Y LI W YANG X F et al Electromechanical coupling vibration characteristics of an AC servomotor-driven translational flexible manipulator
[J]. International Journal of Advanced Robotic Systems , 2016 , 13 (6 ): 1 -10 .
DOI:10.5772/62058
URL
[本文引用: 1]
An auto fabric defect detection system via computer vision is used to replace manual inspection. In this paper, we propose a hardware accelerated algorithm based on a small-scale over-completed dictionary (SSOCD) via sparse coding (SC) method, which is realized on a parallel hardware platform (TMS320C6678). In order to reduce computation, the image patches projections in the training SSOCD are taken as features and the proposed features are more robust, and exhibit obvious advantages in detection results and computational cost. Furthermore, we introduce detection ratio and false ratio in order to measure the performance and reliability of the hardware accelerated algorithm. The experiments show that the proposed algorithm can run with high parallel efficiency and that the detection speed meets the real-time requirements of industrial inspection.
[25]
苏承基 . 电机传动系统控制 [M]. 张永昌,李正熙等, 译. 北京 : 机械工业出版社 , 2013 .
[本文引用: 1]
SU S K Control of electric machine drive systems [M]. ZHANG Yongchang, LI Zhengxi, et al. Beijing : China Machine Press , 2013 .
[本文引用: 1]
[26]
左月飞 . 永磁同步电机伺服系统的转速控制策略研究 [D]. 南京 : 南京航空航天大学 , 2016 .
[本文引用: 1]
ZUO Yuefei Research on speed controller for PMSM servo system [D]. Nanjing : Nanjing University of Aeronautics and Astronautics , 2016 .
[本文引用: 1]
ARMAR-6: A collaborative humanoid robot for industrial environments[C]//2018 IEEE-RAS 18th International Conference on Humanoid Robots
2
2018
... 仿人柔性关节因其独特的关节柔性而被广泛应用于工业生产、航空航天和交互服务等领域[1 -2 ] ,这对柔性关节的控制精度提出了更高要求.然而减速器和弹簧缸等弹性元件的引入降低了关节稳定性,系统极易在外部负载突变的干扰下引发振动问题,严重影响关节控制效果[3 -4 ] .因此,在负载变化的情况下有效解决关节振动问题,是提高仿人柔性关节控制效果的关键. ...
... 在得到负载转矩增量并计算出期望的电机转角增量后,转速调节器将给定的增量信号输出为电机的控制信号.IP控制器是PI控制器的一种改型.根据文献[25 -26 ],在采用相同的控制器参数时,IP控制器相较于PI控制器具有更大的带宽和更小的超调量,但在跟踪连续变化的输入信号时,PI控制器具有更小的跟踪误差.因此,综合利用PI和IP控制器的优势,采用PI-IP控制器作为转速调节器的主要结构.PI-IP控制器的结构如图3 所示.图3 中,ω* 为给定转速; i a * K sp 和K si 分别为调节器的比例系数和积分系数;K 为转矩系数,当忽略电枢感应和其他因素时,可以认为直流电机的输出转矩与电枢电流成正比.混合因数α ∈[0,1 ]为PI控制器和IP控制器的混合因子,当α = 1时,转速调节器为PI调节器;当α = 0时,转速调节器为IP调节器.所以,当α 减小时,会增强IP控制器的控制作用,能够有效降低响应超调;当α 增大时,PI控制器的控制作用会有所增强,可以减小跟踪误差. ...
Stable parking control of a robot astronaut in a space station based on human dynamics
1
2020
... 仿人柔性关节因其独特的关节柔性而被广泛应用于工业生产、航空航天和交互服务等领域[1 -2 ] ,这对柔性关节的控制精度提出了更高要求.然而减速器和弹簧缸等弹性元件的引入降低了关节稳定性,系统极易在外部负载突变的干扰下引发振动问题,严重影响关节控制效果[3 -4 ] .因此,在负载变化的情况下有效解决关节振动问题,是提高仿人柔性关节控制效果的关键. ...
State feedback-based vibration suppression for multi-axis industrial robot with posture change[C]//IECON 2016-42nd Annual Conference of the IEEE Industrial Electronics Society
1
2016
... 仿人柔性关节因其独特的关节柔性而被广泛应用于工业生产、航空航天和交互服务等领域[1 -2 ] ,这对柔性关节的控制精度提出了更高要求.然而减速器和弹簧缸等弹性元件的引入降低了关节稳定性,系统极易在外部负载突变的干扰下引发振动问题,严重影响关节控制效果[3 -4 ] .因此,在负载变化的情况下有效解决关节振动问题,是提高仿人柔性关节控制效果的关键. ...
A vibration suppression method for flexible joints manipulator based on trajectory optimization[C]//2016 IEEE International Conference on Mechatronics and Automation
1
2016
... 仿人柔性关节因其独特的关节柔性而被广泛应用于工业生产、航空航天和交互服务等领域[1 -2 ] ,这对柔性关节的控制精度提出了更高要求.然而减速器和弹簧缸等弹性元件的引入降低了关节稳定性,系统极易在外部负载突变的干扰下引发振动问题,严重影响关节控制效果[3 -4 ] .因此,在负载变化的情况下有效解决关节振动问题,是提高仿人柔性关节控制效果的关键. ...
Modeling and control of elastic joint robots
1
1987
... 由于柔性关节是在电动机(以下简称电机)的驱动下实现指定动作,所以电机的驱动特性对关节的控制性能有重要影响.传统的建模方法通常只关注关节的机械特性,如Spong[5 ] 建立的柔性关节简化模型和Bridges等[6 ] 提出的具有摩擦项以及非线性项的模型均只考虑关节的力学因素,而将电机控制力矩视为系统外部力矩引入模型,无法体现柔性关节系统的机电耦合过程.为解决这一问题,Li等[7 ] 提出一种涵盖电机电气动力学的柔性关节动力学模型,建立电机输入电流、电压与电机输出转矩之间的简化模型,但该模型无法描述电机电磁耦合场的数学关系.Maiti等[8 ] 主要研究了刚性机器人关节系统的电气量与机械量的能量守恒问题,并构建了用于机器人开发的仿真模型,该模型不考虑关节柔性,且将系统电气部分和机械部分分开建模,难以设计有效的控制器结构.Ji等[9 ] 提出了控制器耦合问题,研究机电耦合对机器人控制精度的影响,但其分析方法仅针对双履带机器人,不具有普适性.文献[7 ⇓ -9 ]提出了机器人机电耦合的概念并分析了耦合影响,但未形成具体的建模方法.在此基础上,娄军强[10 ] 完善了耦合作用下关节驱动电机输入电流到输出转速的传递模型.鞠锦勇[11 ] 则进一步提出一种针对具有臂杆柔性的直角操作臂的机电耦合建模方法,虽然其模型不适用于仿人柔性关节系统,但是基于Lagrange-Maxwell方程的建模方法具有一定的普适意义. ...
Redesign of robust controllers for rigid-link flexible-joint robotic manipulators actuated with harmonic drive gearing
1
1995
... 由于柔性关节是在电动机(以下简称电机)的驱动下实现指定动作,所以电机的驱动特性对关节的控制性能有重要影响.传统的建模方法通常只关注关节的机械特性,如Spong[5 ] 建立的柔性关节简化模型和Bridges等[6 ] 提出的具有摩擦项以及非线性项的模型均只考虑关节的力学因素,而将电机控制力矩视为系统外部力矩引入模型,无法体现柔性关节系统的机电耦合过程.为解决这一问题,Li等[7 ] 提出一种涵盖电机电气动力学的柔性关节动力学模型,建立电机输入电流、电压与电机输出转矩之间的简化模型,但该模型无法描述电机电磁耦合场的数学关系.Maiti等[8 ] 主要研究了刚性机器人关节系统的电气量与机械量的能量守恒问题,并构建了用于机器人开发的仿真模型,该模型不考虑关节柔性,且将系统电气部分和机械部分分开建模,难以设计有效的控制器结构.Ji等[9 ] 提出了控制器耦合问题,研究机电耦合对机器人控制精度的影响,但其分析方法仅针对双履带机器人,不具有普适性.文献[7 ⇓ -9 ]提出了机器人机电耦合的概念并分析了耦合影响,但未形成具体的建模方法.在此基础上,娄军强[10 ] 完善了耦合作用下关节驱动电机输入电流到输出转速的传递模型.鞠锦勇[11 ] 则进一步提出一种针对具有臂杆柔性的直角操作臂的机电耦合建模方法,虽然其模型不适用于仿人柔性关节系统,但是基于Lagrange-Maxwell方程的建模方法具有一定的普适意义. ...
Dynamic modeling and mode analysis of flexible-link, flexible-joint robots
2
1998
... 由于柔性关节是在电动机(以下简称电机)的驱动下实现指定动作,所以电机的驱动特性对关节的控制性能有重要影响.传统的建模方法通常只关注关节的机械特性,如Spong[5 ] 建立的柔性关节简化模型和Bridges等[6 ] 提出的具有摩擦项以及非线性项的模型均只考虑关节的力学因素,而将电机控制力矩视为系统外部力矩引入模型,无法体现柔性关节系统的机电耦合过程.为解决这一问题,Li等[7 ] 提出一种涵盖电机电气动力学的柔性关节动力学模型,建立电机输入电流、电压与电机输出转矩之间的简化模型,但该模型无法描述电机电磁耦合场的数学关系.Maiti等[8 ] 主要研究了刚性机器人关节系统的电气量与机械量的能量守恒问题,并构建了用于机器人开发的仿真模型,该模型不考虑关节柔性,且将系统电气部分和机械部分分开建模,难以设计有效的控制器结构.Ji等[9 ] 提出了控制器耦合问题,研究机电耦合对机器人控制精度的影响,但其分析方法仅针对双履带机器人,不具有普适性.文献[7 ⇓ -9 ]提出了机器人机电耦合的概念并分析了耦合影响,但未形成具体的建模方法.在此基础上,娄军强[10 ] 完善了耦合作用下关节驱动电机输入电流到输出转速的传递模型.鞠锦勇[11 ] 则进一步提出一种针对具有臂杆柔性的直角操作臂的机电耦合建模方法,虽然其模型不适用于仿人柔性关节系统,但是基于Lagrange-Maxwell方程的建模方法具有一定的普适意义. ...
... 提出了控制器耦合问题,研究机电耦合对机器人控制精度的影响,但其分析方法仅针对双履带机器人,不具有普适性.文献[7 ⇓ -9 ]提出了机器人机电耦合的概念并分析了耦合影响,但未形成具体的建模方法.在此基础上,娄军强[10 ] 完善了耦合作用下关节驱动电机输入电流到输出转速的传递模型.鞠锦勇[11 ] 则进一步提出一种针对具有臂杆柔性的直角操作臂的机电耦合建模方法,虽然其模型不适用于仿人柔性关节系统,但是基于Lagrange-Maxwell方程的建模方法具有一定的普适意义. ...
Modeling of multi-dimensional system and its application for robot development[C]//2018 International Symposium on Devices, Circuits and Systems
2
2018
... 由于柔性关节是在电动机(以下简称电机)的驱动下实现指定动作,所以电机的驱动特性对关节的控制性能有重要影响.传统的建模方法通常只关注关节的机械特性,如Spong[5 ] 建立的柔性关节简化模型和Bridges等[6 ] 提出的具有摩擦项以及非线性项的模型均只考虑关节的力学因素,而将电机控制力矩视为系统外部力矩引入模型,无法体现柔性关节系统的机电耦合过程.为解决这一问题,Li等[7 ] 提出一种涵盖电机电气动力学的柔性关节动力学模型,建立电机输入电流、电压与电机输出转矩之间的简化模型,但该模型无法描述电机电磁耦合场的数学关系.Maiti等[8 ] 主要研究了刚性机器人关节系统的电气量与机械量的能量守恒问题,并构建了用于机器人开发的仿真模型,该模型不考虑关节柔性,且将系统电气部分和机械部分分开建模,难以设计有效的控制器结构.Ji等[9 ] 提出了控制器耦合问题,研究机电耦合对机器人控制精度的影响,但其分析方法仅针对双履带机器人,不具有普适性.文献[7 ⇓ -9 ]提出了机器人机电耦合的概念并分析了耦合影响,但未形成具体的建模方法.在此基础上,娄军强[10 ] 完善了耦合作用下关节驱动电机输入电流到输出转速的传递模型.鞠锦勇[11 ] 则进一步提出一种针对具有臂杆柔性的直角操作臂的机电耦合建模方法,虽然其模型不适用于仿人柔性关节系统,但是基于Lagrange-Maxwell方程的建模方法具有一定的普适意义. ...
... ⇓ -9 ]提出了机器人机电耦合的概念并分析了耦合影响,但未形成具体的建模方法.在此基础上,娄军强[10 ] 完善了耦合作用下关节驱动电机输入电流到输出转速的传递模型.鞠锦勇[11 ] 则进一步提出一种针对具有臂杆柔性的直角操作臂的机电耦合建模方法,虽然其模型不适用于仿人柔性关节系统,但是基于Lagrange-Maxwell方程的建模方法具有一定的普适意义. ...
Design of sliding cloud-model cross coupling controller for tracked mobile robot[C]//2018 37th Chinese Control Conference
2
2018
... 由于柔性关节是在电动机(以下简称电机)的驱动下实现指定动作,所以电机的驱动特性对关节的控制性能有重要影响.传统的建模方法通常只关注关节的机械特性,如Spong[5 ] 建立的柔性关节简化模型和Bridges等[6 ] 提出的具有摩擦项以及非线性项的模型均只考虑关节的力学因素,而将电机控制力矩视为系统外部力矩引入模型,无法体现柔性关节系统的机电耦合过程.为解决这一问题,Li等[7 ] 提出一种涵盖电机电气动力学的柔性关节动力学模型,建立电机输入电流、电压与电机输出转矩之间的简化模型,但该模型无法描述电机电磁耦合场的数学关系.Maiti等[8 ] 主要研究了刚性机器人关节系统的电气量与机械量的能量守恒问题,并构建了用于机器人开发的仿真模型,该模型不考虑关节柔性,且将系统电气部分和机械部分分开建模,难以设计有效的控制器结构.Ji等[9 ] 提出了控制器耦合问题,研究机电耦合对机器人控制精度的影响,但其分析方法仅针对双履带机器人,不具有普适性.文献[7 ⇓ -9 ]提出了机器人机电耦合的概念并分析了耦合影响,但未形成具体的建模方法.在此基础上,娄军强[10 ] 完善了耦合作用下关节驱动电机输入电流到输出转速的传递模型.鞠锦勇[11 ] 则进一步提出一种针对具有臂杆柔性的直角操作臂的机电耦合建模方法,虽然其模型不适用于仿人柔性关节系统,但是基于Lagrange-Maxwell方程的建模方法具有一定的普适意义. ...
... -9 ]提出了机器人机电耦合的概念并分析了耦合影响,但未形成具体的建模方法.在此基础上,娄军强[10 ] 完善了耦合作用下关节驱动电机输入电流到输出转速的传递模型.鞠锦勇[11 ] 则进一步提出一种针对具有臂杆柔性的直角操作臂的机电耦合建模方法,虽然其模型不适用于仿人柔性关节系统,但是基于Lagrange-Maxwell方程的建模方法具有一定的普适意义. ...
1
2013
... 由于柔性关节是在电动机(以下简称电机)的驱动下实现指定动作,所以电机的驱动特性对关节的控制性能有重要影响.传统的建模方法通常只关注关节的机械特性,如Spong[5 ] 建立的柔性关节简化模型和Bridges等[6 ] 提出的具有摩擦项以及非线性项的模型均只考虑关节的力学因素,而将电机控制力矩视为系统外部力矩引入模型,无法体现柔性关节系统的机电耦合过程.为解决这一问题,Li等[7 ] 提出一种涵盖电机电气动力学的柔性关节动力学模型,建立电机输入电流、电压与电机输出转矩之间的简化模型,但该模型无法描述电机电磁耦合场的数学关系.Maiti等[8 ] 主要研究了刚性机器人关节系统的电气量与机械量的能量守恒问题,并构建了用于机器人开发的仿真模型,该模型不考虑关节柔性,且将系统电气部分和机械部分分开建模,难以设计有效的控制器结构.Ji等[9 ] 提出了控制器耦合问题,研究机电耦合对机器人控制精度的影响,但其分析方法仅针对双履带机器人,不具有普适性.文献[7 ⇓ -9 ]提出了机器人机电耦合的概念并分析了耦合影响,但未形成具体的建模方法.在此基础上,娄军强[10 ] 完善了耦合作用下关节驱动电机输入电流到输出转速的传递模型.鞠锦勇[11 ] 则进一步提出一种针对具有臂杆柔性的直角操作臂的机电耦合建模方法,虽然其模型不适用于仿人柔性关节系统,但是基于Lagrange-Maxwell方程的建模方法具有一定的普适意义. ...
1
2013
... 由于柔性关节是在电动机(以下简称电机)的驱动下实现指定动作,所以电机的驱动特性对关节的控制性能有重要影响.传统的建模方法通常只关注关节的机械特性,如Spong[5 ] 建立的柔性关节简化模型和Bridges等[6 ] 提出的具有摩擦项以及非线性项的模型均只考虑关节的力学因素,而将电机控制力矩视为系统外部力矩引入模型,无法体现柔性关节系统的机电耦合过程.为解决这一问题,Li等[7 ] 提出一种涵盖电机电气动力学的柔性关节动力学模型,建立电机输入电流、电压与电机输出转矩之间的简化模型,但该模型无法描述电机电磁耦合场的数学关系.Maiti等[8 ] 主要研究了刚性机器人关节系统的电气量与机械量的能量守恒问题,并构建了用于机器人开发的仿真模型,该模型不考虑关节柔性,且将系统电气部分和机械部分分开建模,难以设计有效的控制器结构.Ji等[9 ] 提出了控制器耦合问题,研究机电耦合对机器人控制精度的影响,但其分析方法仅针对双履带机器人,不具有普适性.文献[7 ⇓ -9 ]提出了机器人机电耦合的概念并分析了耦合影响,但未形成具体的建模方法.在此基础上,娄军强[10 ] 完善了耦合作用下关节驱动电机输入电流到输出转速的传递模型.鞠锦勇[11 ] 则进一步提出一种针对具有臂杆柔性的直角操作臂的机电耦合建模方法,虽然其模型不适用于仿人柔性关节系统,但是基于Lagrange-Maxwell方程的建模方法具有一定的普适意义. ...
2
2018
... 由于柔性关节是在电动机(以下简称电机)的驱动下实现指定动作,所以电机的驱动特性对关节的控制性能有重要影响.传统的建模方法通常只关注关节的机械特性,如Spong[5 ] 建立的柔性关节简化模型和Bridges等[6 ] 提出的具有摩擦项以及非线性项的模型均只考虑关节的力学因素,而将电机控制力矩视为系统外部力矩引入模型,无法体现柔性关节系统的机电耦合过程.为解决这一问题,Li等[7 ] 提出一种涵盖电机电气动力学的柔性关节动力学模型,建立电机输入电流、电压与电机输出转矩之间的简化模型,但该模型无法描述电机电磁耦合场的数学关系.Maiti等[8 ] 主要研究了刚性机器人关节系统的电气量与机械量的能量守恒问题,并构建了用于机器人开发的仿真模型,该模型不考虑关节柔性,且将系统电气部分和机械部分分开建模,难以设计有效的控制器结构.Ji等[9 ] 提出了控制器耦合问题,研究机电耦合对机器人控制精度的影响,但其分析方法仅针对双履带机器人,不具有普适性.文献[7 ⇓ -9 ]提出了机器人机电耦合的概念并分析了耦合影响,但未形成具体的建模方法.在此基础上,娄军强[10 ] 完善了耦合作用下关节驱动电机输入电流到输出转速的传递模型.鞠锦勇[11 ] 则进一步提出一种针对具有臂杆柔性的直角操作臂的机电耦合建模方法,虽然其模型不适用于仿人柔性关节系统,但是基于Lagrange-Maxwell方程的建模方法具有一定的普适意义. ...
... Lagrange-Maxwell方程的广义坐标形式[11 ,24 ] 如下: ...
2
2018
... 由于柔性关节是在电动机(以下简称电机)的驱动下实现指定动作,所以电机的驱动特性对关节的控制性能有重要影响.传统的建模方法通常只关注关节的机械特性,如Spong[5 ] 建立的柔性关节简化模型和Bridges等[6 ] 提出的具有摩擦项以及非线性项的模型均只考虑关节的力学因素,而将电机控制力矩视为系统外部力矩引入模型,无法体现柔性关节系统的机电耦合过程.为解决这一问题,Li等[7 ] 提出一种涵盖电机电气动力学的柔性关节动力学模型,建立电机输入电流、电压与电机输出转矩之间的简化模型,但该模型无法描述电机电磁耦合场的数学关系.Maiti等[8 ] 主要研究了刚性机器人关节系统的电气量与机械量的能量守恒问题,并构建了用于机器人开发的仿真模型,该模型不考虑关节柔性,且将系统电气部分和机械部分分开建模,难以设计有效的控制器结构.Ji等[9 ] 提出了控制器耦合问题,研究机电耦合对机器人控制精度的影响,但其分析方法仅针对双履带机器人,不具有普适性.文献[7 ⇓ -9 ]提出了机器人机电耦合的概念并分析了耦合影响,但未形成具体的建模方法.在此基础上,娄军强[10 ] 完善了耦合作用下关节驱动电机输入电流到输出转速的传递模型.鞠锦勇[11 ] 则进一步提出一种针对具有臂杆柔性的直角操作臂的机电耦合建模方法,虽然其模型不适用于仿人柔性关节系统,但是基于Lagrange-Maxwell方程的建模方法具有一定的普适意义. ...
... Lagrange-Maxwell方程的广义坐标形式[11 ,24 ] 如下: ...
Design of a linear variable-stiffness mechanism using preloaded bistable beams[C]//2014 IEEE/ASME International Conference on Advanced Intelligent Mechatronics
1
2014
... 早期对柔性关节振动抑制方法的研究多采用变刚度结构(VSA)的被动控制或附加传感器的主动控制[12 -13 ] ,这使关节结构复杂度增加、体积增大.目前则重点研究基于状态反馈的末端位置控制、阻抗控制、力矩反馈控制等方法.Liu等[14 ] 提出一种VSA力矩控制方法,通过调整输出力矩实现不同负载状况下的关节刚度变化;Yoo等[15 ] 提出一种采用观测器反馈连杆侧运动信息的关节力矩控制方法,通过补偿弹簧形变实现振动抑制.但这两类方法仅针对Kelly等[16 ] 提出基于重力矩补偿的比例-微分(PD)控制方法,解决了负载变化导致的手臂平衡位置偏差问题;Gupta等[17 ] 设计了轮式机器人的3级轨迹跟踪控制器,并采用模型逆运算实现对电机转矩的估算;Chen等[18 ] 设计了一种用于踝关节的力矩补偿比例-积分(PI)控制器,实现了不同倾角时的力矩稳定输出.虽然上述方法存在未考虑关节柔性、应用对象具有局限性以及仅考虑稳态误差而忽略动态性能等问题,但采用力矩补偿实现振动抑制的方法具有推广意义.实现力矩补偿控制的前提,是对外部扰动力矩进行精确估计,并准确跟踪系统状态变化.Song等[19 ] 提出一种采用负载力矩观测器估计电机输出转矩的方法,判断机械臂是否发生碰撞振动.Cui等[20 ] 则提出采用扩展状态观测器的方法,估计水下机器人的不可测量线速度和扰动力矩.Yabuki等[21 ] 提出一种基于瞬时状态观测器的关节加速度控制方法,采用状态反馈的积分-比例微分(I-PD)控制器实现对关节力矩的稳定控制.王漪梦等[22 ] 提出一种基于干扰观测器的扰动补偿方法,并设计双位置闭环控制器来提高机械臂跟踪精度.Cheng等[23 ] 提出一种利用非线性干扰观测器估计外部扰动的方法,并采用积分反步法设计关节跟踪控制器,提高了系统鲁棒性.这些研究成果为关节振动抑制提供了有效的状态跟踪和扰动估计方法. ...
具有力矩传感器的柔性关节的振动抑制
1
2011
... 早期对柔性关节振动抑制方法的研究多采用变刚度结构(VSA)的被动控制或附加传感器的主动控制[12 -13 ] ,这使关节结构复杂度增加、体积增大.目前则重点研究基于状态反馈的末端位置控制、阻抗控制、力矩反馈控制等方法.Liu等[14 ] 提出一种VSA力矩控制方法,通过调整输出力矩实现不同负载状况下的关节刚度变化;Yoo等[15 ] 提出一种采用观测器反馈连杆侧运动信息的关节力矩控制方法,通过补偿弹簧形变实现振动抑制.但这两类方法仅针对Kelly等[16 ] 提出基于重力矩补偿的比例-微分(PD)控制方法,解决了负载变化导致的手臂平衡位置偏差问题;Gupta等[17 ] 设计了轮式机器人的3级轨迹跟踪控制器,并采用模型逆运算实现对电机转矩的估算;Chen等[18 ] 设计了一种用于踝关节的力矩补偿比例-积分(PI)控制器,实现了不同倾角时的力矩稳定输出.虽然上述方法存在未考虑关节柔性、应用对象具有局限性以及仅考虑稳态误差而忽略动态性能等问题,但采用力矩补偿实现振动抑制的方法具有推广意义.实现力矩补偿控制的前提,是对外部扰动力矩进行精确估计,并准确跟踪系统状态变化.Song等[19 ] 提出一种采用负载力矩观测器估计电机输出转矩的方法,判断机械臂是否发生碰撞振动.Cui等[20 ] 则提出采用扩展状态观测器的方法,估计水下机器人的不可测量线速度和扰动力矩.Yabuki等[21 ] 提出一种基于瞬时状态观测器的关节加速度控制方法,采用状态反馈的积分-比例微分(I-PD)控制器实现对关节力矩的稳定控制.王漪梦等[22 ] 提出一种基于干扰观测器的扰动补偿方法,并设计双位置闭环控制器来提高机械臂跟踪精度.Cheng等[23 ] 提出一种利用非线性干扰观测器估计外部扰动的方法,并采用积分反步法设计关节跟踪控制器,提高了系统鲁棒性.这些研究成果为关节振动抑制提供了有效的状态跟踪和扰动估计方法. ...
具有力矩传感器的柔性关节的振动抑制
1
2011
... 早期对柔性关节振动抑制方法的研究多采用变刚度结构(VSA)的被动控制或附加传感器的主动控制[12 -13 ] ,这使关节结构复杂度增加、体积增大.目前则重点研究基于状态反馈的末端位置控制、阻抗控制、力矩反馈控制等方法.Liu等[14 ] 提出一种VSA力矩控制方法,通过调整输出力矩实现不同负载状况下的关节刚度变化;Yoo等[15 ] 提出一种采用观测器反馈连杆侧运动信息的关节力矩控制方法,通过补偿弹簧形变实现振动抑制.但这两类方法仅针对Kelly等[16 ] 提出基于重力矩补偿的比例-微分(PD)控制方法,解决了负载变化导致的手臂平衡位置偏差问题;Gupta等[17 ] 设计了轮式机器人的3级轨迹跟踪控制器,并采用模型逆运算实现对电机转矩的估算;Chen等[18 ] 设计了一种用于踝关节的力矩补偿比例-积分(PI)控制器,实现了不同倾角时的力矩稳定输出.虽然上述方法存在未考虑关节柔性、应用对象具有局限性以及仅考虑稳态误差而忽略动态性能等问题,但采用力矩补偿实现振动抑制的方法具有推广意义.实现力矩补偿控制的前提,是对外部扰动力矩进行精确估计,并准确跟踪系统状态变化.Song等[19 ] 提出一种采用负载力矩观测器估计电机输出转矩的方法,判断机械臂是否发生碰撞振动.Cui等[20 ] 则提出采用扩展状态观测器的方法,估计水下机器人的不可测量线速度和扰动力矩.Yabuki等[21 ] 提出一种基于瞬时状态观测器的关节加速度控制方法,采用状态反馈的积分-比例微分(I-PD)控制器实现对关节力矩的稳定控制.王漪梦等[22 ] 提出一种基于干扰观测器的扰动补偿方法,并设计双位置闭环控制器来提高机械臂跟踪精度.Cheng等[23 ] 提出一种利用非线性干扰观测器估计外部扰动的方法,并采用积分反步法设计关节跟踪控制器,提高了系统鲁棒性.这些研究成果为关节振动抑制提供了有效的状态跟踪和扰动估计方法. ...
Impedance-controlled variable stiffness actuator for lower limb robot applications
1
2020
... 早期对柔性关节振动抑制方法的研究多采用变刚度结构(VSA)的被动控制或附加传感器的主动控制[12 -13 ] ,这使关节结构复杂度增加、体积增大.目前则重点研究基于状态反馈的末端位置控制、阻抗控制、力矩反馈控制等方法.Liu等[14 ] 提出一种VSA力矩控制方法,通过调整输出力矩实现不同负载状况下的关节刚度变化;Yoo等[15 ] 提出一种采用观测器反馈连杆侧运动信息的关节力矩控制方法,通过补偿弹簧形变实现振动抑制.但这两类方法仅针对Kelly等[16 ] 提出基于重力矩补偿的比例-微分(PD)控制方法,解决了负载变化导致的手臂平衡位置偏差问题;Gupta等[17 ] 设计了轮式机器人的3级轨迹跟踪控制器,并采用模型逆运算实现对电机转矩的估算;Chen等[18 ] 设计了一种用于踝关节的力矩补偿比例-积分(PI)控制器,实现了不同倾角时的力矩稳定输出.虽然上述方法存在未考虑关节柔性、应用对象具有局限性以及仅考虑稳态误差而忽略动态性能等问题,但采用力矩补偿实现振动抑制的方法具有推广意义.实现力矩补偿控制的前提,是对外部扰动力矩进行精确估计,并准确跟踪系统状态变化.Song等[19 ] 提出一种采用负载力矩观测器估计电机输出转矩的方法,判断机械臂是否发生碰撞振动.Cui等[20 ] 则提出采用扩展状态观测器的方法,估计水下机器人的不可测量线速度和扰动力矩.Yabuki等[21 ] 提出一种基于瞬时状态观测器的关节加速度控制方法,采用状态反馈的积分-比例微分(I-PD)控制器实现对关节力矩的稳定控制.王漪梦等[22 ] 提出一种基于干扰观测器的扰动补偿方法,并设计双位置闭环控制器来提高机械臂跟踪精度.Cheng等[23 ] 提出一种利用非线性干扰观测器估计外部扰动的方法,并采用积分反步法设计关节跟踪控制器,提高了系统鲁棒性.这些研究成果为关节振动抑制提供了有效的状态跟踪和扰动估计方法. ...
Link motion feedback based force/torque servo control of robot joint with series elasticity[C]//2015 12th International Conference on Ubiquitous Robots and Ambient Intelligence
1
2015
... 早期对柔性关节振动抑制方法的研究多采用变刚度结构(VSA)的被动控制或附加传感器的主动控制[12 -13 ] ,这使关节结构复杂度增加、体积增大.目前则重点研究基于状态反馈的末端位置控制、阻抗控制、力矩反馈控制等方法.Liu等[14 ] 提出一种VSA力矩控制方法,通过调整输出力矩实现不同负载状况下的关节刚度变化;Yoo等[15 ] 提出一种采用观测器反馈连杆侧运动信息的关节力矩控制方法,通过补偿弹簧形变实现振动抑制.但这两类方法仅针对Kelly等[16 ] 提出基于重力矩补偿的比例-微分(PD)控制方法,解决了负载变化导致的手臂平衡位置偏差问题;Gupta等[17 ] 设计了轮式机器人的3级轨迹跟踪控制器,并采用模型逆运算实现对电机转矩的估算;Chen等[18 ] 设计了一种用于踝关节的力矩补偿比例-积分(PI)控制器,实现了不同倾角时的力矩稳定输出.虽然上述方法存在未考虑关节柔性、应用对象具有局限性以及仅考虑稳态误差而忽略动态性能等问题,但采用力矩补偿实现振动抑制的方法具有推广意义.实现力矩补偿控制的前提,是对外部扰动力矩进行精确估计,并准确跟踪系统状态变化.Song等[19 ] 提出一种采用负载力矩观测器估计电机输出转矩的方法,判断机械臂是否发生碰撞振动.Cui等[20 ] 则提出采用扩展状态观测器的方法,估计水下机器人的不可测量线速度和扰动力矩.Yabuki等[21 ] 提出一种基于瞬时状态观测器的关节加速度控制方法,采用状态反馈的积分-比例微分(I-PD)控制器实现对关节力矩的稳定控制.王漪梦等[22 ] 提出一种基于干扰观测器的扰动补偿方法,并设计双位置闭环控制器来提高机械臂跟踪精度.Cheng等[23 ] 提出一种利用非线性干扰观测器估计外部扰动的方法,并采用积分反步法设计关节跟踪控制器,提高了系统鲁棒性.这些研究成果为关节振动抑制提供了有效的状态跟踪和扰动估计方法. ...
On robustness of PD control with gravity compensation of torque-driven robot manipulators[C]// 2019 International Conference on Control, Automation and Diagnosis.
1
2019
... 早期对柔性关节振动抑制方法的研究多采用变刚度结构(VSA)的被动控制或附加传感器的主动控制[12 -13 ] ,这使关节结构复杂度增加、体积增大.目前则重点研究基于状态反馈的末端位置控制、阻抗控制、力矩反馈控制等方法.Liu等[14 ] 提出一种VSA力矩控制方法,通过调整输出力矩实现不同负载状况下的关节刚度变化;Yoo等[15 ] 提出一种采用观测器反馈连杆侧运动信息的关节力矩控制方法,通过补偿弹簧形变实现振动抑制.但这两类方法仅针对Kelly等[16 ] 提出基于重力矩补偿的比例-微分(PD)控制方法,解决了负载变化导致的手臂平衡位置偏差问题;Gupta等[17 ] 设计了轮式机器人的3级轨迹跟踪控制器,并采用模型逆运算实现对电机转矩的估算;Chen等[18 ] 设计了一种用于踝关节的力矩补偿比例-积分(PI)控制器,实现了不同倾角时的力矩稳定输出.虽然上述方法存在未考虑关节柔性、应用对象具有局限性以及仅考虑稳态误差而忽略动态性能等问题,但采用力矩补偿实现振动抑制的方法具有推广意义.实现力矩补偿控制的前提,是对外部扰动力矩进行精确估计,并准确跟踪系统状态变化.Song等[19 ] 提出一种采用负载力矩观测器估计电机输出转矩的方法,判断机械臂是否发生碰撞振动.Cui等[20 ] 则提出采用扩展状态观测器的方法,估计水下机器人的不可测量线速度和扰动力矩.Yabuki等[21 ] 提出一种基于瞬时状态观测器的关节加速度控制方法,采用状态反馈的积分-比例微分(I-PD)控制器实现对关节力矩的稳定控制.王漪梦等[22 ] 提出一种基于干扰观测器的扰动补偿方法,并设计双位置闭环控制器来提高机械臂跟踪精度.Cheng等[23 ] 提出一种利用非线性干扰观测器估计外部扰动的方法,并采用积分反步法设计关节跟踪控制器,提高了系统鲁棒性.这些研究成果为关节振动抑制提供了有效的状态跟踪和扰动估计方法. ...
Three-stage computed-torque controller for trajectory tracking in non-holonomic wheeled mobile robot [C]//2018 IEEE 15th International Workshop on Advanced Motion Control
1
2018
... 早期对柔性关节振动抑制方法的研究多采用变刚度结构(VSA)的被动控制或附加传感器的主动控制[12 -13 ] ,这使关节结构复杂度增加、体积增大.目前则重点研究基于状态反馈的末端位置控制、阻抗控制、力矩反馈控制等方法.Liu等[14 ] 提出一种VSA力矩控制方法,通过调整输出力矩实现不同负载状况下的关节刚度变化;Yoo等[15 ] 提出一种采用观测器反馈连杆侧运动信息的关节力矩控制方法,通过补偿弹簧形变实现振动抑制.但这两类方法仅针对Kelly等[16 ] 提出基于重力矩补偿的比例-微分(PD)控制方法,解决了负载变化导致的手臂平衡位置偏差问题;Gupta等[17 ] 设计了轮式机器人的3级轨迹跟踪控制器,并采用模型逆运算实现对电机转矩的估算;Chen等[18 ] 设计了一种用于踝关节的力矩补偿比例-积分(PI)控制器,实现了不同倾角时的力矩稳定输出.虽然上述方法存在未考虑关节柔性、应用对象具有局限性以及仅考虑稳态误差而忽略动态性能等问题,但采用力矩补偿实现振动抑制的方法具有推广意义.实现力矩补偿控制的前提,是对外部扰动力矩进行精确估计,并准确跟踪系统状态变化.Song等[19 ] 提出一种采用负载力矩观测器估计电机输出转矩的方法,判断机械臂是否发生碰撞振动.Cui等[20 ] 则提出采用扩展状态观测器的方法,估计水下机器人的不可测量线速度和扰动力矩.Yabuki等[21 ] 提出一种基于瞬时状态观测器的关节加速度控制方法,采用状态反馈的积分-比例微分(I-PD)控制器实现对关节力矩的稳定控制.王漪梦等[22 ] 提出一种基于干扰观测器的扰动补偿方法,并设计双位置闭环控制器来提高机械臂跟踪精度.Cheng等[23 ] 提出一种利用非线性干扰观测器估计外部扰动的方法,并采用积分反步法设计关节跟踪控制器,提高了系统鲁棒性.这些研究成果为关节振动抑制提供了有效的状态跟踪和扰动估计方法. ...
Torque-compensated motion control design for a mobile robot moving on ground with ill-conditioned road situations[C]//2016 2nd International Conference on Control, Automation and Robotics
1
2016
... 早期对柔性关节振动抑制方法的研究多采用变刚度结构(VSA)的被动控制或附加传感器的主动控制[12 -13 ] ,这使关节结构复杂度增加、体积增大.目前则重点研究基于状态反馈的末端位置控制、阻抗控制、力矩反馈控制等方法.Liu等[14 ] 提出一种VSA力矩控制方法,通过调整输出力矩实现不同负载状况下的关节刚度变化;Yoo等[15 ] 提出一种采用观测器反馈连杆侧运动信息的关节力矩控制方法,通过补偿弹簧形变实现振动抑制.但这两类方法仅针对Kelly等[16 ] 提出基于重力矩补偿的比例-微分(PD)控制方法,解决了负载变化导致的手臂平衡位置偏差问题;Gupta等[17 ] 设计了轮式机器人的3级轨迹跟踪控制器,并采用模型逆运算实现对电机转矩的估算;Chen等[18 ] 设计了一种用于踝关节的力矩补偿比例-积分(PI)控制器,实现了不同倾角时的力矩稳定输出.虽然上述方法存在未考虑关节柔性、应用对象具有局限性以及仅考虑稳态误差而忽略动态性能等问题,但采用力矩补偿实现振动抑制的方法具有推广意义.实现力矩补偿控制的前提,是对外部扰动力矩进行精确估计,并准确跟踪系统状态变化.Song等[19 ] 提出一种采用负载力矩观测器估计电机输出转矩的方法,判断机械臂是否发生碰撞振动.Cui等[20 ] 则提出采用扩展状态观测器的方法,估计水下机器人的不可测量线速度和扰动力矩.Yabuki等[21 ] 提出一种基于瞬时状态观测器的关节加速度控制方法,采用状态反馈的积分-比例微分(I-PD)控制器实现对关节力矩的稳定控制.王漪梦等[22 ] 提出一种基于干扰观测器的扰动补偿方法,并设计双位置闭环控制器来提高机械臂跟踪精度.Cheng等[23 ] 提出一种利用非线性干扰观测器估计外部扰动的方法,并采用积分反步法设计关节跟踪控制器,提高了系统鲁棒性.这些研究成果为关节振动抑制提供了有效的状态跟踪和扰动估计方法. ...
Sensorless collision detection for robots based on load torque observer[C]//2019 22nd International Conference on Electrical Machines and Systems
1
2019
... 早期对柔性关节振动抑制方法的研究多采用变刚度结构(VSA)的被动控制或附加传感器的主动控制[12 -13 ] ,这使关节结构复杂度增加、体积增大.目前则重点研究基于状态反馈的末端位置控制、阻抗控制、力矩反馈控制等方法.Liu等[14 ] 提出一种VSA力矩控制方法,通过调整输出力矩实现不同负载状况下的关节刚度变化;Yoo等[15 ] 提出一种采用观测器反馈连杆侧运动信息的关节力矩控制方法,通过补偿弹簧形变实现振动抑制.但这两类方法仅针对Kelly等[16 ] 提出基于重力矩补偿的比例-微分(PD)控制方法,解决了负载变化导致的手臂平衡位置偏差问题;Gupta等[17 ] 设计了轮式机器人的3级轨迹跟踪控制器,并采用模型逆运算实现对电机转矩的估算;Chen等[18 ] 设计了一种用于踝关节的力矩补偿比例-积分(PI)控制器,实现了不同倾角时的力矩稳定输出.虽然上述方法存在未考虑关节柔性、应用对象具有局限性以及仅考虑稳态误差而忽略动态性能等问题,但采用力矩补偿实现振动抑制的方法具有推广意义.实现力矩补偿控制的前提,是对外部扰动力矩进行精确估计,并准确跟踪系统状态变化.Song等[19 ] 提出一种采用负载力矩观测器估计电机输出转矩的方法,判断机械臂是否发生碰撞振动.Cui等[20 ] 则提出采用扩展状态观测器的方法,估计水下机器人的不可测量线速度和扰动力矩.Yabuki等[21 ] 提出一种基于瞬时状态观测器的关节加速度控制方法,采用状态反馈的积分-比例微分(I-PD)控制器实现对关节力矩的稳定控制.王漪梦等[22 ] 提出一种基于干扰观测器的扰动补偿方法,并设计双位置闭环控制器来提高机械臂跟踪精度.Cheng等[23 ] 提出一种利用非线性干扰观测器估计外部扰动的方法,并采用积分反步法设计关节跟踪控制器,提高了系统鲁棒性.这些研究成果为关节振动抑制提供了有效的状态跟踪和扰动估计方法. ...
Extended state observer-based integral sliding mode control for an underwater robot with unknown disturbances and uncertain nonlinearities
1
2017
... 早期对柔性关节振动抑制方法的研究多采用变刚度结构(VSA)的被动控制或附加传感器的主动控制[12 -13 ] ,这使关节结构复杂度增加、体积增大.目前则重点研究基于状态反馈的末端位置控制、阻抗控制、力矩反馈控制等方法.Liu等[14 ] 提出一种VSA力矩控制方法,通过调整输出力矩实现不同负载状况下的关节刚度变化;Yoo等[15 ] 提出一种采用观测器反馈连杆侧运动信息的关节力矩控制方法,通过补偿弹簧形变实现振动抑制.但这两类方法仅针对Kelly等[16 ] 提出基于重力矩补偿的比例-微分(PD)控制方法,解决了负载变化导致的手臂平衡位置偏差问题;Gupta等[17 ] 设计了轮式机器人的3级轨迹跟踪控制器,并采用模型逆运算实现对电机转矩的估算;Chen等[18 ] 设计了一种用于踝关节的力矩补偿比例-积分(PI)控制器,实现了不同倾角时的力矩稳定输出.虽然上述方法存在未考虑关节柔性、应用对象具有局限性以及仅考虑稳态误差而忽略动态性能等问题,但采用力矩补偿实现振动抑制的方法具有推广意义.实现力矩补偿控制的前提,是对外部扰动力矩进行精确估计,并准确跟踪系统状态变化.Song等[19 ] 提出一种采用负载力矩观测器估计电机输出转矩的方法,判断机械臂是否发生碰撞振动.Cui等[20 ] 则提出采用扩展状态观测器的方法,估计水下机器人的不可测量线速度和扰动力矩.Yabuki等[21 ] 提出一种基于瞬时状态观测器的关节加速度控制方法,采用状态反馈的积分-比例微分(I-PD)控制器实现对关节力矩的稳定控制.王漪梦等[22 ] 提出一种基于干扰观测器的扰动补偿方法,并设计双位置闭环控制器来提高机械臂跟踪精度.Cheng等[23 ] 提出一种利用非线性干扰观测器估计外部扰动的方法,并采用积分反步法设计关节跟踪控制器,提高了系统鲁棒性.这些研究成果为关节振动抑制提供了有效的状态跟踪和扰动估计方法. ...
Design method of I-PD force control system based on instantaneous state observer for industrial robot[C]// 2016 IEEE 14th International Workshop on Advanced Motion Control
1
2016
... 早期对柔性关节振动抑制方法的研究多采用变刚度结构(VSA)的被动控制或附加传感器的主动控制[12 -13 ] ,这使关节结构复杂度增加、体积增大.目前则重点研究基于状态反馈的末端位置控制、阻抗控制、力矩反馈控制等方法.Liu等[14 ] 提出一种VSA力矩控制方法,通过调整输出力矩实现不同负载状况下的关节刚度变化;Yoo等[15 ] 提出一种采用观测器反馈连杆侧运动信息的关节力矩控制方法,通过补偿弹簧形变实现振动抑制.但这两类方法仅针对Kelly等[16 ] 提出基于重力矩补偿的比例-微分(PD)控制方法,解决了负载变化导致的手臂平衡位置偏差问题;Gupta等[17 ] 设计了轮式机器人的3级轨迹跟踪控制器,并采用模型逆运算实现对电机转矩的估算;Chen等[18 ] 设计了一种用于踝关节的力矩补偿比例-积分(PI)控制器,实现了不同倾角时的力矩稳定输出.虽然上述方法存在未考虑关节柔性、应用对象具有局限性以及仅考虑稳态误差而忽略动态性能等问题,但采用力矩补偿实现振动抑制的方法具有推广意义.实现力矩补偿控制的前提,是对外部扰动力矩进行精确估计,并准确跟踪系统状态变化.Song等[19 ] 提出一种采用负载力矩观测器估计电机输出转矩的方法,判断机械臂是否发生碰撞振动.Cui等[20 ] 则提出采用扩展状态观测器的方法,估计水下机器人的不可测量线速度和扰动力矩.Yabuki等[21 ] 提出一种基于瞬时状态观测器的关节加速度控制方法,采用状态反馈的积分-比例微分(I-PD)控制器实现对关节力矩的稳定控制.王漪梦等[22 ] 提出一种基于干扰观测器的扰动补偿方法,并设计双位置闭环控制器来提高机械臂跟踪精度.Cheng等[23 ] 提出一种利用非线性干扰观测器估计外部扰动的方法,并采用积分反步法设计关节跟踪控制器,提高了系统鲁棒性.这些研究成果为关节振动抑制提供了有效的状态跟踪和扰动估计方法. ...
基于干扰观测器的空间机械臂柔性关节振动抑制
1
2019
... 早期对柔性关节振动抑制方法的研究多采用变刚度结构(VSA)的被动控制或附加传感器的主动控制[12 -13 ] ,这使关节结构复杂度增加、体积增大.目前则重点研究基于状态反馈的末端位置控制、阻抗控制、力矩反馈控制等方法.Liu等[14 ] 提出一种VSA力矩控制方法,通过调整输出力矩实现不同负载状况下的关节刚度变化;Yoo等[15 ] 提出一种采用观测器反馈连杆侧运动信息的关节力矩控制方法,通过补偿弹簧形变实现振动抑制.但这两类方法仅针对Kelly等[16 ] 提出基于重力矩补偿的比例-微分(PD)控制方法,解决了负载变化导致的手臂平衡位置偏差问题;Gupta等[17 ] 设计了轮式机器人的3级轨迹跟踪控制器,并采用模型逆运算实现对电机转矩的估算;Chen等[18 ] 设计了一种用于踝关节的力矩补偿比例-积分(PI)控制器,实现了不同倾角时的力矩稳定输出.虽然上述方法存在未考虑关节柔性、应用对象具有局限性以及仅考虑稳态误差而忽略动态性能等问题,但采用力矩补偿实现振动抑制的方法具有推广意义.实现力矩补偿控制的前提,是对外部扰动力矩进行精确估计,并准确跟踪系统状态变化.Song等[19 ] 提出一种采用负载力矩观测器估计电机输出转矩的方法,判断机械臂是否发生碰撞振动.Cui等[20 ] 则提出采用扩展状态观测器的方法,估计水下机器人的不可测量线速度和扰动力矩.Yabuki等[21 ] 提出一种基于瞬时状态观测器的关节加速度控制方法,采用状态反馈的积分-比例微分(I-PD)控制器实现对关节力矩的稳定控制.王漪梦等[22 ] 提出一种基于干扰观测器的扰动补偿方法,并设计双位置闭环控制器来提高机械臂跟踪精度.Cheng等[23 ] 提出一种利用非线性干扰观测器估计外部扰动的方法,并采用积分反步法设计关节跟踪控制器,提高了系统鲁棒性.这些研究成果为关节振动抑制提供了有效的状态跟踪和扰动估计方法. ...
基于干扰观测器的空间机械臂柔性关节振动抑制
1
2019
... 早期对柔性关节振动抑制方法的研究多采用变刚度结构(VSA)的被动控制或附加传感器的主动控制[12 -13 ] ,这使关节结构复杂度增加、体积增大.目前则重点研究基于状态反馈的末端位置控制、阻抗控制、力矩反馈控制等方法.Liu等[14 ] 提出一种VSA力矩控制方法,通过调整输出力矩实现不同负载状况下的关节刚度变化;Yoo等[15 ] 提出一种采用观测器反馈连杆侧运动信息的关节力矩控制方法,通过补偿弹簧形变实现振动抑制.但这两类方法仅针对Kelly等[16 ] 提出基于重力矩补偿的比例-微分(PD)控制方法,解决了负载变化导致的手臂平衡位置偏差问题;Gupta等[17 ] 设计了轮式机器人的3级轨迹跟踪控制器,并采用模型逆运算实现对电机转矩的估算;Chen等[18 ] 设计了一种用于踝关节的力矩补偿比例-积分(PI)控制器,实现了不同倾角时的力矩稳定输出.虽然上述方法存在未考虑关节柔性、应用对象具有局限性以及仅考虑稳态误差而忽略动态性能等问题,但采用力矩补偿实现振动抑制的方法具有推广意义.实现力矩补偿控制的前提,是对外部扰动力矩进行精确估计,并准确跟踪系统状态变化.Song等[19 ] 提出一种采用负载力矩观测器估计电机输出转矩的方法,判断机械臂是否发生碰撞振动.Cui等[20 ] 则提出采用扩展状态观测器的方法,估计水下机器人的不可测量线速度和扰动力矩.Yabuki等[21 ] 提出一种基于瞬时状态观测器的关节加速度控制方法,采用状态反馈的积分-比例微分(I-PD)控制器实现对关节力矩的稳定控制.王漪梦等[22 ] 提出一种基于干扰观测器的扰动补偿方法,并设计双位置闭环控制器来提高机械臂跟踪精度.Cheng等[23 ] 提出一种利用非线性干扰观测器估计外部扰动的方法,并采用积分反步法设计关节跟踪控制器,提高了系统鲁棒性.这些研究成果为关节振动抑制提供了有效的状态跟踪和扰动估计方法. ...
Disturbance-observer-based tracking control for a flexible-joint robotic manipulator with external disturbance[C]// 2020 Chinese Control and Decision Conference
1
2020
... 早期对柔性关节振动抑制方法的研究多采用变刚度结构(VSA)的被动控制或附加传感器的主动控制[12 -13 ] ,这使关节结构复杂度增加、体积增大.目前则重点研究基于状态反馈的末端位置控制、阻抗控制、力矩反馈控制等方法.Liu等[14 ] 提出一种VSA力矩控制方法,通过调整输出力矩实现不同负载状况下的关节刚度变化;Yoo等[15 ] 提出一种采用观测器反馈连杆侧运动信息的关节力矩控制方法,通过补偿弹簧形变实现振动抑制.但这两类方法仅针对Kelly等[16 ] 提出基于重力矩补偿的比例-微分(PD)控制方法,解决了负载变化导致的手臂平衡位置偏差问题;Gupta等[17 ] 设计了轮式机器人的3级轨迹跟踪控制器,并采用模型逆运算实现对电机转矩的估算;Chen等[18 ] 设计了一种用于踝关节的力矩补偿比例-积分(PI)控制器,实现了不同倾角时的力矩稳定输出.虽然上述方法存在未考虑关节柔性、应用对象具有局限性以及仅考虑稳态误差而忽略动态性能等问题,但采用力矩补偿实现振动抑制的方法具有推广意义.实现力矩补偿控制的前提,是对外部扰动力矩进行精确估计,并准确跟踪系统状态变化.Song等[19 ] 提出一种采用负载力矩观测器估计电机输出转矩的方法,判断机械臂是否发生碰撞振动.Cui等[20 ] 则提出采用扩展状态观测器的方法,估计水下机器人的不可测量线速度和扰动力矩.Yabuki等[21 ] 提出一种基于瞬时状态观测器的关节加速度控制方法,采用状态反馈的积分-比例微分(I-PD)控制器实现对关节力矩的稳定控制.王漪梦等[22 ] 提出一种基于干扰观测器的扰动补偿方法,并设计双位置闭环控制器来提高机械臂跟踪精度.Cheng等[23 ] 提出一种利用非线性干扰观测器估计外部扰动的方法,并采用积分反步法设计关节跟踪控制器,提高了系统鲁棒性.这些研究成果为关节振动抑制提供了有效的状态跟踪和扰动估计方法. ...
Electromechanical coupling vibration characteristics of an AC servomotor-driven translational flexible manipulator
1
2016
... Lagrange-Maxwell方程的广义坐标形式[11 ,24 ] 如下: ...
1
2013
... 在得到负载转矩增量并计算出期望的电机转角增量后,转速调节器将给定的增量信号输出为电机的控制信号.IP控制器是PI控制器的一种改型.根据文献[25 -26 ],在采用相同的控制器参数时,IP控制器相较于PI控制器具有更大的带宽和更小的超调量,但在跟踪连续变化的输入信号时,PI控制器具有更小的跟踪误差.因此,综合利用PI和IP控制器的优势,采用PI-IP控制器作为转速调节器的主要结构.PI-IP控制器的结构如图3 所示.图3 中,ω* 为给定转速; i a * K sp 和K si 分别为调节器的比例系数和积分系数;K 为转矩系数,当忽略电枢感应和其他因素时,可以认为直流电机的输出转矩与电枢电流成正比.混合因数α ∈[0,1 ]为PI控制器和IP控制器的混合因子,当α = 1时,转速调节器为PI调节器;当α = 0时,转速调节器为IP调节器.所以,当α 减小时,会增强IP控制器的控制作用,能够有效降低响应超调;当α 增大时,PI控制器的控制作用会有所增强,可以减小跟踪误差. ...
1
2013
... 在得到负载转矩增量并计算出期望的电机转角增量后,转速调节器将给定的增量信号输出为电机的控制信号.IP控制器是PI控制器的一种改型.根据文献[25 -26 ],在采用相同的控制器参数时,IP控制器相较于PI控制器具有更大的带宽和更小的超调量,但在跟踪连续变化的输入信号时,PI控制器具有更小的跟踪误差.因此,综合利用PI和IP控制器的优势,采用PI-IP控制器作为转速调节器的主要结构.PI-IP控制器的结构如图3 所示.图3 中,ω* 为给定转速; i a * K sp 和K si 分别为调节器的比例系数和积分系数;K 为转矩系数,当忽略电枢感应和其他因素时,可以认为直流电机的输出转矩与电枢电流成正比.混合因数α ∈[0,1 ]为PI控制器和IP控制器的混合因子,当α = 1时,转速调节器为PI调节器;当α = 0时,转速调节器为IP调节器.所以,当α 减小时,会增强IP控制器的控制作用,能够有效降低响应超调;当α 增大时,PI控制器的控制作用会有所增强,可以减小跟踪误差. ...
1
2016
... 在得到负载转矩增量并计算出期望的电机转角增量后,转速调节器将给定的增量信号输出为电机的控制信号.IP控制器是PI控制器的一种改型.根据文献[25 -26 ],在采用相同的控制器参数时,IP控制器相较于PI控制器具有更大的带宽和更小的超调量,但在跟踪连续变化的输入信号时,PI控制器具有更小的跟踪误差.因此,综合利用PI和IP控制器的优势,采用PI-IP控制器作为转速调节器的主要结构.PI-IP控制器的结构如图3 所示.图3 中,ω* 为给定转速; i a * K sp 和K si 分别为调节器的比例系数和积分系数;K 为转矩系数,当忽略电枢感应和其他因素时,可以认为直流电机的输出转矩与电枢电流成正比.混合因数α ∈[0,1 ]为PI控制器和IP控制器的混合因子,当α = 1时,转速调节器为PI调节器;当α = 0时,转速调节器为IP调节器.所以,当α 减小时,会增强IP控制器的控制作用,能够有效降低响应超调;当α 增大时,PI控制器的控制作用会有所增强,可以减小跟踪误差. ...
1
2016
... 在得到负载转矩增量并计算出期望的电机转角增量后,转速调节器将给定的增量信号输出为电机的控制信号.IP控制器是PI控制器的一种改型.根据文献[25 -26 ],在采用相同的控制器参数时,IP控制器相较于PI控制器具有更大的带宽和更小的超调量,但在跟踪连续变化的输入信号时,PI控制器具有更小的跟踪误差.因此,综合利用PI和IP控制器的优势,采用PI-IP控制器作为转速调节器的主要结构.PI-IP控制器的结构如图3 所示.图3 中,ω* 为给定转速; i a * K sp 和K si 分别为调节器的比例系数和积分系数;K 为转矩系数,当忽略电枢感应和其他因素时,可以认为直流电机的输出转矩与电枢电流成正比.混合因数α ∈[0,1 ]为PI控制器和IP控制器的混合因子,当α = 1时,转速调节器为PI调节器;当α = 0时,转速调节器为IP调节器.所以,当α 减小时,会增强IP控制器的控制作用,能够有效降低响应超调;当α 增大时,PI控制器的控制作用会有所增强,可以减小跟踪误差. ...





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}