上海交通大学学报 ›› 2023, Vol. 57 ›› Issue (5): 601-612.doi: 10.16183/j.cnki.jsjtu.2021.342
所属专题: 《上海交通大学学报》2023年“电子信息与电气工程”专题
宋传明, 杜钦君( ), 李存贺, 罗永刚
), 李存贺, 罗永刚
收稿日期:2021-09-10
修回日期:2022-10-28
接受日期:2021-12-08
出版日期:2023-05-28
发布日期:2023-06-02
通讯作者:
杜钦君
E-mail:duqinjun@sdut.edu.cn.
作者简介:宋传明(1995-),博士生,从事仿人机器人驱动控制技术、特种电机控制技术研究.
基金资助:
SONG Chuanming, DU Qinjun(), LI Cunhe, LUO Yonggang
Received:2021-09-10
Revised:2022-10-28
Accepted:2021-12-08
Online:2023-05-28
Published:2023-06-02
Contact:
DU Qinjun
E-mail:duqinjun@sdut.edu.cn.
摘要:
针对仿人柔性关节负载突变引起的关节振动问题,提出一种基于状态观测器的转矩补偿控制方法.通过控制电动机输出与扰动力矩等值的转矩增量,使关节力矩快速平衡变化后的负载力矩,缩短弹性元件被动适应负载变化的振荡过程.设计了估计负载扰动转矩和电动机转速的状态观测器,并利用Lyapunov函数证明其收敛性;建立基于比例积分-积分比例(PI-IP)转速调节器的驱动系统控制结构,并将观测器的输出前馈输入到转速调节器中,提高系统抗干扰能力.仿真结果表明,与比例积分微分(PID)控制和关节力反馈比例微分(PD)控制相比,所提方法能够在负载变化后的0.6 s内使电动机转速恢复稳定,并在1 s内实现关节振动抑制,关节转速调节时间分别缩短了约1.8 s和0.9 s,有效提升系统动态调节能力.最后,通过在一体化柔性关节测试平台上的实验,验证了所提方法的有效性.
中图分类号:
宋传明, 杜钦君, 李存贺, 罗永刚. 仿人柔性关节耦合建模及变负载振动抑制[J]. 上海交通大学学报, 2023, 57(5): 601-612.
SONG Chuanming, DU Qinjun, LI Cunhe, LUO Yonggang. Coupling Modeling of Humanoid Flexible Joint and Vibration Suppression at Variable Load[J]. Journal of Shanghai Jiao Tong University, 2023, 57(5): 601-612.
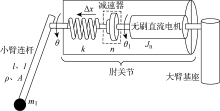
图1
仿人柔性关节机械臂的肘关节物理模型
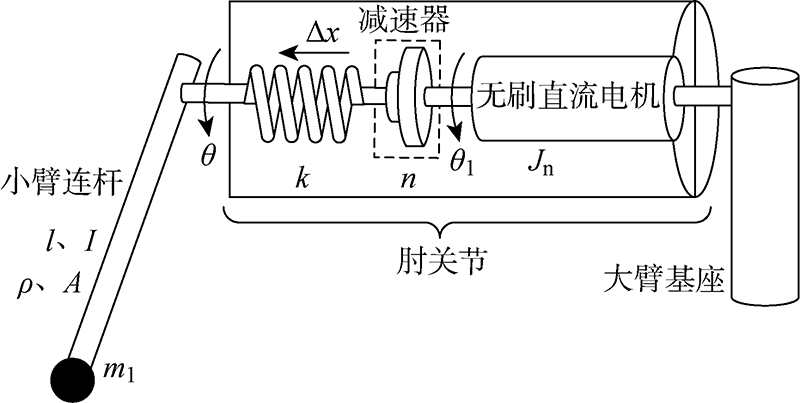
表1
广义坐标定义
| 广义坐 标与广 义力 标识 | 电磁部分 | 机械传动部分 | |||||
|---|---|---|---|---|---|---|---|
| 定子 | 转子 | 电机 转角 j=4 | 手臂 转角 j=5 | ||||
| j=1 | j=2 | j=3 | |||||
| Aj | qa | qb | qc | ψr | θ1 | θ | |
| ia | ib | ic | — | ||||
| F1 | F2 | F3 | — | F4 | F5 | ||
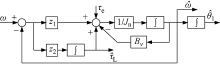
图2
状态观测器结构
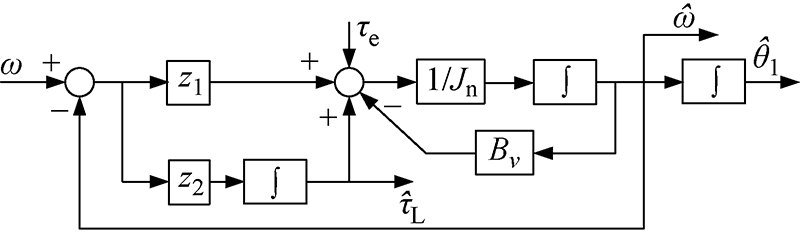

图3
PI-IP控制器结构


图4
PI-IP控制器的等效结构

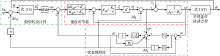
图5
关节驱动系统控制框图

表2
柔性关节驱动系统参数
| 参数 | 设定值 |
|---|---|
| 驱动电机额定电压/V | 12 |
| 驱动电机额定转速/(r·min-1) | 1200 |
| 电枢绕组等效电感/mH | 1.4 |
| 电枢绕组等效电阻/Ω | 24 |
| 转子转动惯量/(kg·m2) | 0.062 |
| 手臂转动惯量/(kg·m2) | 0.45 |
| 电机电磁阻尼系数/(N·m·s·rad-1) | 0.2 |
| 关节机械阻尼系数/(N·m·s·rad-1) | 0.5 |
| 关节刚度系数/(N·m·rad-1) | 10 |
| 减速器减速比 | 100∶1 |

图6
扰动转矩观测值及观测误差
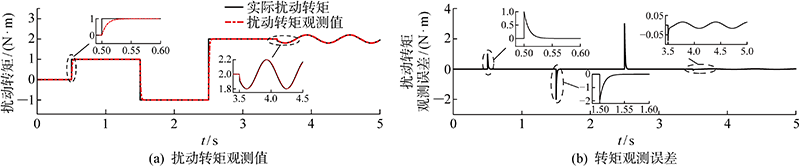

图7
电机转速观测值及观测误差


图8
驱动电机输出曲线

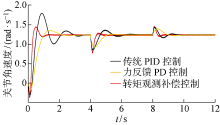
图9
关节角速度曲线
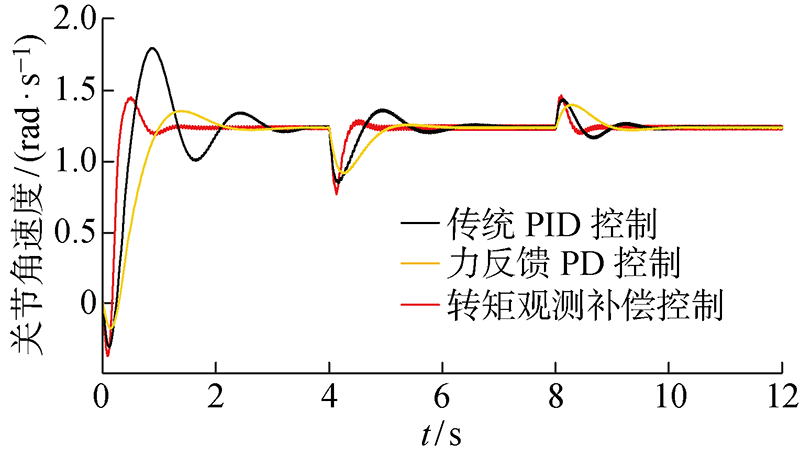

图10
实验设备现场
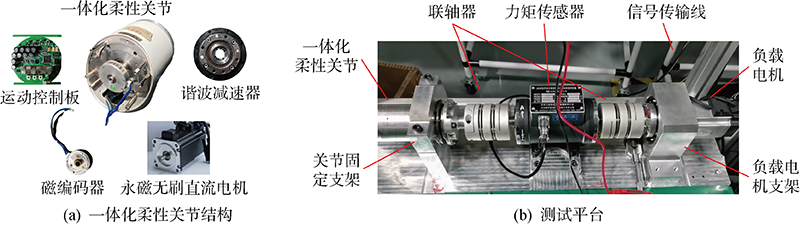

图11
实验平台结构示意图
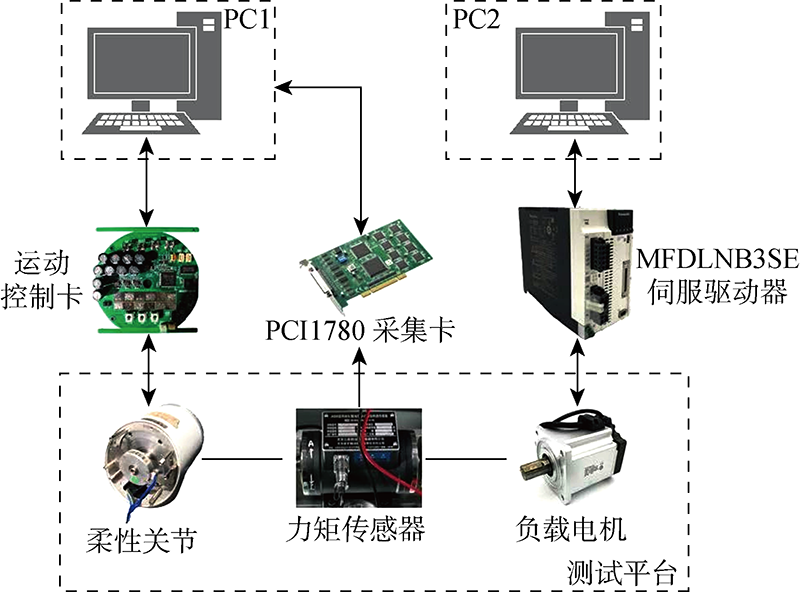

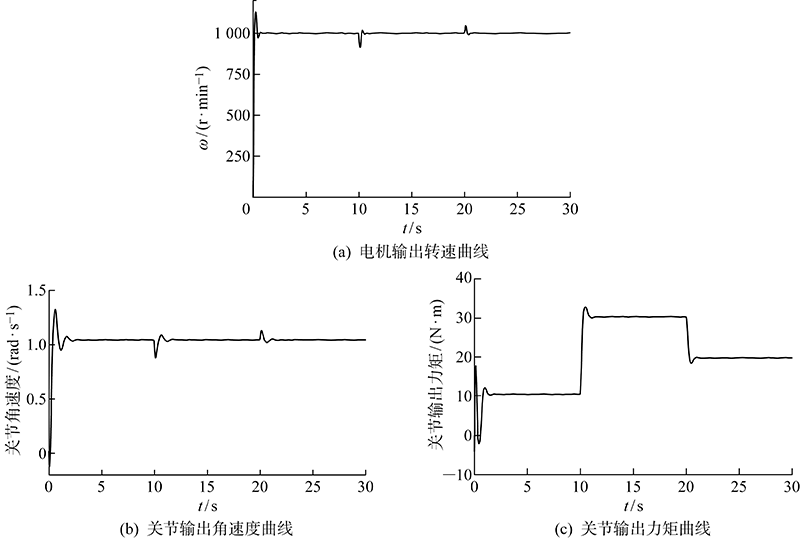
图12
负载力矩变化时的转矩补偿控制方法实验结果
| [1] | ASFOUR T, KAUL L, WÄCHTER M, et al. ARMAR-6: A collaborative humanoid robot for industrial environments[C]//2018 IEEE-RAS 18th International Conference on Humanoid Robots. Beijing, China: IEEE, 2018: 447-454. |
| [2] |
JIANG Z H, XU J F, LI H, et al. Stable parking control of a robot astronaut in a space station based on human dynamics[J]. IEEE Transactions on Robotics, 2020, 36(2): 399-413.
doi: 10.1109/TRO.8860 URL |
| [3] | ITO K, IWASAKI M. State feedback-based vibration suppression for multi-axis industrial robot with posture change[C]//IECON 2016-42nd Annual Conference of the IEEE Industrial Electronics Society. Florence, Italy: IEEE, 2016: 5119-5124. |
| [4] | GUO C Q, GAO H B, NI F L, et al. A vibration suppression method for flexible joints manipulator based on trajectory optimization[C]//2016 IEEE International Conference on Mechatronics and Automation. Harbin, China: IEEE, 2016: 338-343. |
| [5] |
SPONG M W. Modeling and control of elastic joint robots[J]. Journal of Dynamic Systems, Measurement, and Control, 1987, 109(4): 310-318.
doi: 10.1115/1.3143860 URL |
| [6] |
BRIDGES M M, DAWSON D M. Redesign of robust controllers for rigid-link flexible-joint robotic manipulators actuated with harmonic drive gearing[J]. IEE Proceedings-Control Theory and Applications, 1995, 142(5): 508-514.
doi: 10.1049/ip-cta:19951970 URL |
| [7] |
LI D G, ZU J W, GOLDENBERG A A. Dynamic modeling and mode analysis of flexible-link, flexible-joint robots[J]. Mechanism and Machine Theory, 1998, 33(7): 1031-1044.
doi: 10.1016/S0094-114X(97)00054-2 URL |
| [8] | MAITI T K, OCHI Y, MIURA-MATTAUSCH M, et al. Modeling of multi-dimensional system and its application for robot development[C]//2018 International Symposium on Devices, Circuits and Systems. Howrah, India: IEEE, 2018: 1-4. |
| [9] | JI P, LI S, XU M J, et al. Design of sliding cloud-model cross coupling controller for tracked mobile robot[C]//2018 37th Chinese Control Conference. Wuhan, China: IEEE, 2018: 5353-5357. |
| [10] | 娄军强. 基于压电致动器的空间柔性机械臂系统的轨迹跟踪与振动抑制一体化控制研究[D]. 杭州: 浙江大学, 2013. |
| LOU Junqiang. Research on integrated control of trajectory tracking and vibration suppression of a space flexible manipulator system using piezoelectric actuators[D]. Hangzhou: Zhejiang University, 2013. | |
| [11] | 鞠锦勇. 移动柔性操作臂系统机电耦合动力学特性及振动控制研究[D]. 徐州: 中国矿业大学, 2018. |
| JU Jinyong. Research on electromechanical-coupling dynamic and vibration control of the translational flexible manipulator system[D]. Xuzhou: China University of Mining and Technology, 2018. | |
| [12] | WU Y S, LAN C C. Design of a linear variable-stiffness mechanism using preloaded bistable beams[C]//2014 IEEE/ASME International Conference on Advanced Intelligent Mechatronics. Besacon, France: IEEE, 2014: 605-610. |
| [13] | 郭闯强, 倪风雷, 孙敬颋, 等. 具有力矩传感器的柔性关节的振动抑制[J]. 机器人, 2011, 33(4): 449-454. |
| GUO Chuangqiang, NI Fenglei, SUN Jingting, et al. Vibration suppression for the flexible joint with torque sensor[J]. Robot, 2011, 33(4): 449-454. | |
| [14] |
LIU L, LEONHARDT S, NGO C, et al. Impedance-controlled variable stiffness actuator for lower limb robot applications[J]. IEEE Transactions on Automation Science and Engineering, 2020, 17(2): 991-1004.
doi: 10.1109/TASE.8856 URL |
| [15] | YOO S, CHUNG W K. Link motion feedback based force/torque servo control of robot joint with series elasticity[C]//2015 12th International Conference on Ubiquitous Robots and Ambient Intelligence. Goyangi, Korea (South): IEEE, 2015: 133-134. |
| [16] | KELLY R, MONROY C. On robustness of PD control with gravity compensation of torque-driven robot manipulators[C]// 2019 International Conference on Control, Automation and Diagnosis. Grenoble, France: IEEE, 2019: 1-5. |
| [17] | GUPTA V, BENDAPUDI N, KAR I N, et al. Three-stage computed-torque controller for trajectory tracking in non-holonomic wheeled mobile robot [C]//2018 IEEE 15th International Workshop on Advanced Motion Control. Tokyo, Japan: IEEE, 2018: 144-149. |
| [18] | CHEN C J, YEH S S. Torque-compensated motion control design for a mobile robot moving on ground with ill-conditioned road situations[C]//2016 2nd International Conference on Control, Automation and Robotics. Hong Kong, China: IEEE, 2016: 38-43. |
| [19] | SONG Y Y, XIAO X, XU W Z. Sensorless collision detection for robots based on load torque observer[C]//2019 22nd International Conference on Electrical Machines and Systems. Harbin, China: IEEE, 2019: 1-5. |
| [20] |
CUI R X, CHEN L P, YANG C G, et al. Extended state observer-based integral sliding mode control for an underwater robot with unknown disturbances and uncertain nonlinearities[J]. IEEE Transactions on Industrial Electronics, 2017, 64(8): 6785-6795.
doi: 10.1109/TIE.41 URL |
| [21] | YABUKI A, OHISHI K, MIYAZAKI T, et al. Design method of I-PD force control system based on instantaneous state observer for industrial robot[C]// 2016 IEEE 14th International Workshop on Advanced Motion Control. Auckland, New Zealand: IEEE, 2016: 91-96. |
| [22] | 王漪梦, 吴斌, 周挺. 基于干扰观测器的空间机械臂柔性关节振动抑制[J]. 自动化与仪器仪表, 2019(3): 147-150. |
| WANG Yimeng, WU Bin, ZHOU Ting. Vibration suppression for the space manipulator flexible joint based on disturbance observer[J]. Automation & Instrumentation, 2019(3): 147-150. | |
| [23] | CHENG W L, ZHANG Z C, WU Y Q. Disturbance-observer-based tracking control for a flexible-joint robotic manipulator with external disturbance[C]// 2020 Chinese Control and Decision Conference. Hefei, China: IEEE 2020: 3406-3409. |
| [24] |
JU J Y, LI W, YANG X F, et al. Electromechanical coupling vibration characteristics of an AC servomotor-driven translational flexible manipulator[J]. International Journal of Advanced Robotic Systems, 2016, 13(6): 1-10.
doi: 10.5772/62058 URL |
| [25] | 苏承基. 电机传动系统控制[M]. 张永昌,李正熙等, 译. 北京: 机械工业出版社, 2013. |
| SU S K. Control of electric machine drive systems[M]. ZHANG Yongchang, LI Zhengxi, et al. Beijing: China Machine Press, 2013. | |
| [26] | 左月飞. 永磁同步电机伺服系统的转速控制策略研究[D]. 南京: 南京航空航天大学, 2016. |
| ZUO Yuefei. Research on speed controller for PMSM servo system[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2016. |
| [1] | 位广宇, 谷朝臣, 杨舒盛, 关新平. 非对称柔性支撑龙门双驱平台的解耦与同步控制[J]. 上海交通大学学报, 2023, 57(5): 593-600. |
| [2] | 吕硕, 张庆振, 郭云鹤, 丰硕. 基于反步滑模的偏转弹头导弹姿态控制[J]. 空天防御, 2022, 5(4): 30-37. |
| [3] | 夏国清, 刘彩云, 陈兴华. 动力定位辅助锚泊定位船有限时间观测器设计[J]. 上海交通大学学报, 2020, 54(8): 849-855. |
| [4] | 金一欢, 刘露, 彭一洋, 程笠, 郑子元. 基于混合Bang-Bang控制的直接力姿态控制方法研究[J]. 空天防御, 2020, 3(3): 111-117. |
| [5] | 万航, 徐胜利, 张庆振, 张迪. 基于动态逆的空天变体飞行器姿态控制[J]. 空天防御, 2019, 2(4): 25-31. |
| [6] | 陈泽宏, 钟继鸿, 赵宏宇, 王鉴. 基于扩张状态观测器的有限时间收敛制导律[J]. 空天防御, 2019, 2(3): 25-30. |
| [7] | 王广文,姚建勇. 基于指令滤波的电液伺服系统输出反馈控制[J]. 上海交通大学学报, 2019, 53(12): 1482-1487. |
| [8] | 侯晓伟a,汤兆全b,孙绪彬b,蔡虎b,张梦杨a,董海荣a. 基于ARM的列车运行控制算法仿真测试系统[J]. 上海交通大学学报(自然版), 2017, 51(6): 741-747. |
| [9] | 齐晓慧1,王俭臣2. 固定翼飞机动力学模型的子空间辨识方法[J]. 上海交通大学学报(自然版), 2016, 50(04): 613-618. |
| [10] | 周涛. 基于反双曲正弦函数的自抗扰控制器[J]. 上海交通大学学报(自然版), 2015, 49(08): 1186-1190. |
| [11] | 吴跃飞1,胡智琦2,马大为1,姚建勇1,乐贵高1. 具有状态约束的机电伺服系统自适应鲁棒控制[J]. 上海交通大学学报(自然版), 2014, 48(05): 707-712. |
| [12] | 陈兴林,刘川,周乃新,王斌. 基于ZPET-FF和ESO的直线伺服鲁棒跟踪控制[J]. 上海交通大学学报(自然版), 2014, 48(05): 679-684. |
| [13] | 周林阳,王生捷. 基于反正切非线性函数的自抗扰控制[J]. 上海交通大学学报(自然版), 2013, 47(07): 1043-1048. |
| [14] | 苗中华,刘成良,王旭永,李彦明. 大摩擦力矩下电液伺服系统高精度控制与实验分析[J]. 上海交通大学学报(自然版), 2008, 42(10): 1731-1735. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||