Journal of Shanghai Jiao Tong University ›› 2024, Vol. 58 ›› Issue (11): 1772-1782.doi: 10.16183/j.cnki.jsjtu.2024.207
Special Issue: 制导、导航与控制
• Guidance, Navigation and Control • Previous Articles Next Articles
LÜ Hailong1, LIU Yanbin1, CHEN Boyi1( ), HE Zhen2, JIA Jun3
), HE Zhen2, JIA Jun3
Received:2024-06-06
Revised:2024-06-26
Accepted:2024-07-01
Online:2024-11-28
Published:2024-12-02
CLC Number:
LÜ Hailong, LIU Yanbin, CHEN Boyi, HE Zhen, JIA Jun. Multibody Dynamics Modeling and Control of Folding Wing Vertical Takeoff and Landing Aircraft[J]. Journal of Shanghai Jiao Tong University, 2024, 58(11): 1772-1782.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2024.207
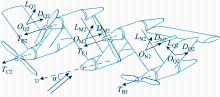
Fig.1
Aerodynamic distribution of FWA

Fig.2
Schematic of tilt-folding during climb
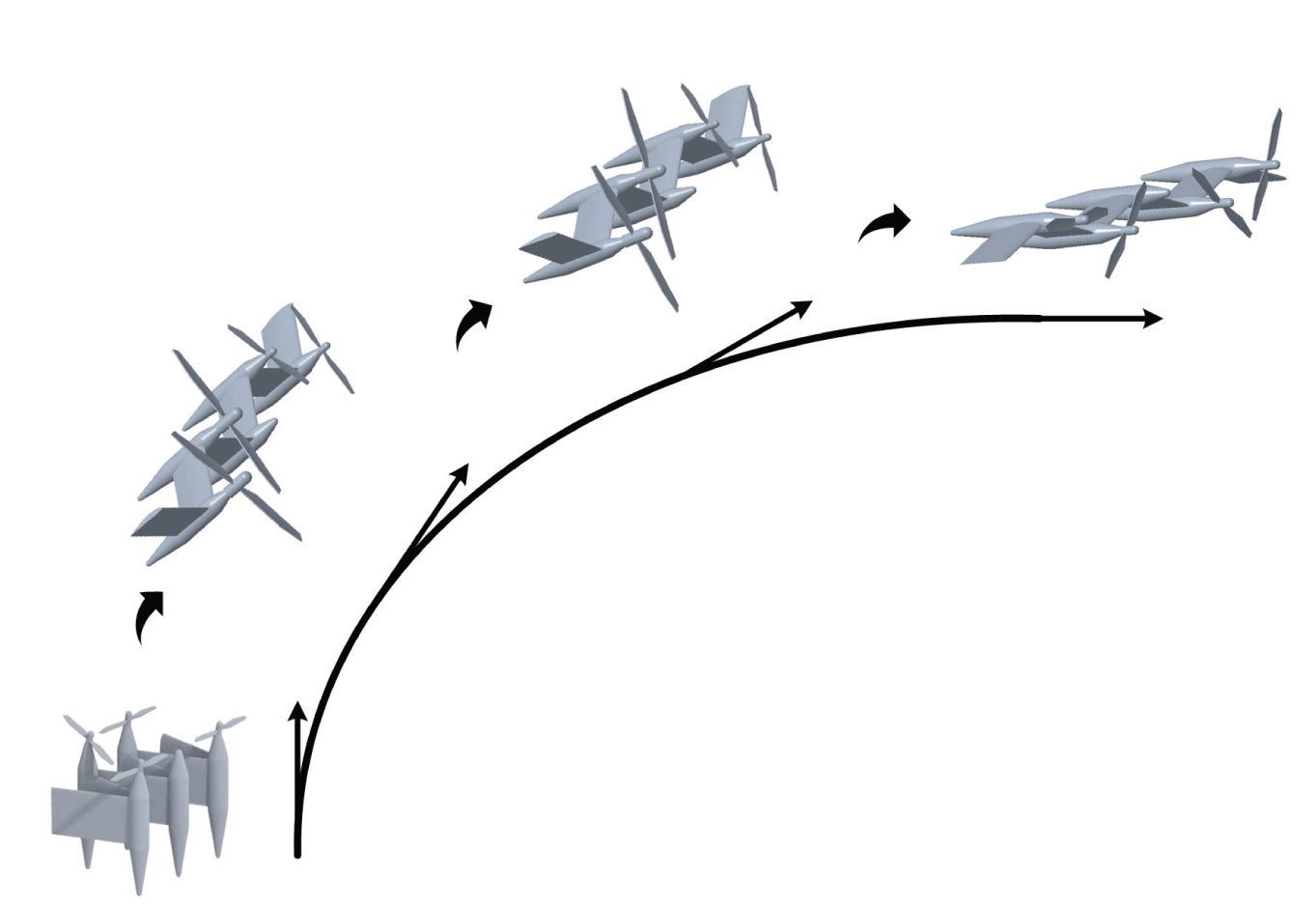

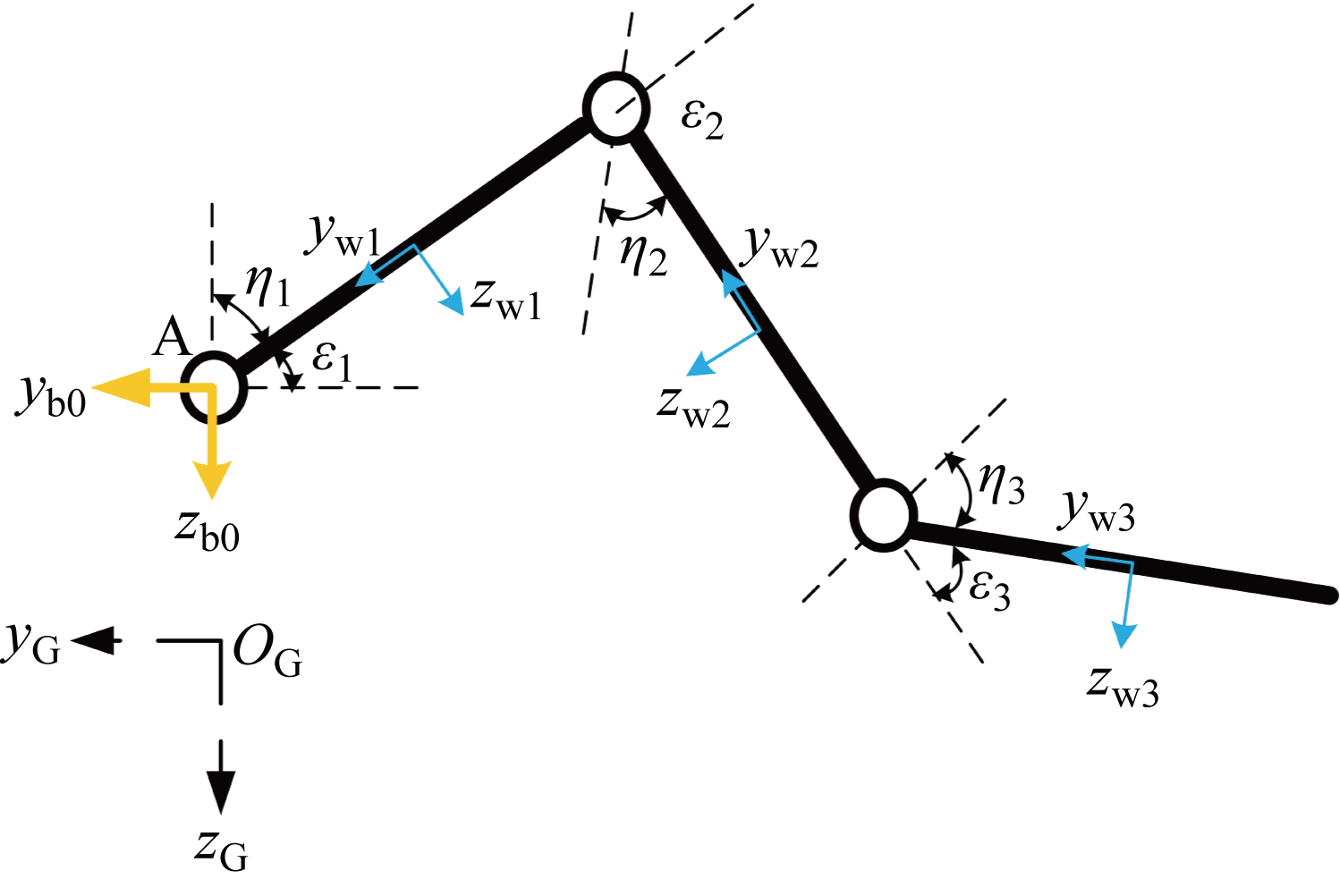
Fig.3
Definition of local coordinate system and folding angle
Tab.1
Parameters of FWA
| 参数 | 值 | 参数 | 值 |
|---|---|---|---|
| 机舱质量, mb/kg | 2 | 机翼对y轴惯量, | 8.98×10-3 |
| 机翼质量, mw/kg | 0.2 | 机翼对z轴惯量, | 0.2404 |
| 机舱长度, lb/m | 1 | 机舱对x轴惯量, | 4.35×10-3 |
| 平均气动弦长, cref/m | 0.3 | 机舱对y轴惯量, | 7.82×10-2 |
| 翼展长, lw/m | 0.4 | 机舱对z轴惯量, | 7.82×10-2 |
| 翼面积, S/m2 | 0.12 | 折叠角, η/(°) | 0~75 |
| 机翼对x轴惯量, | 0.2317 | 单元翼翼型 | NACA6412 |
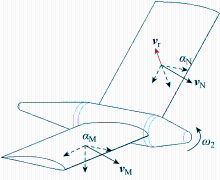
Fig.4
Local angle of attack of unit wing during folding
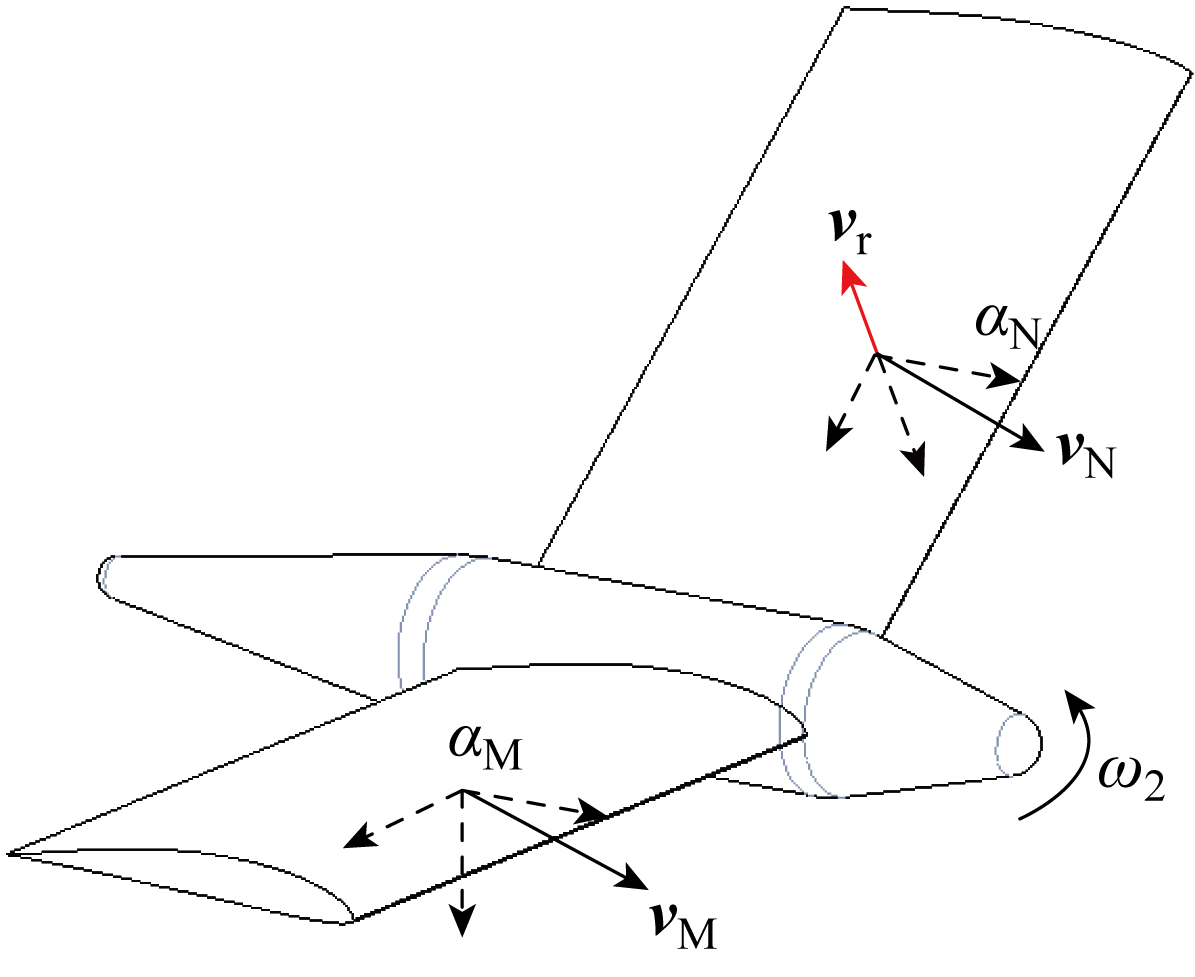
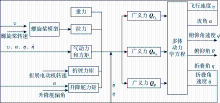
Fig.5
Module diagram for multi-body dynamics model simulation
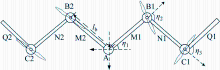
Fig.6
Configurations of centralized deformation
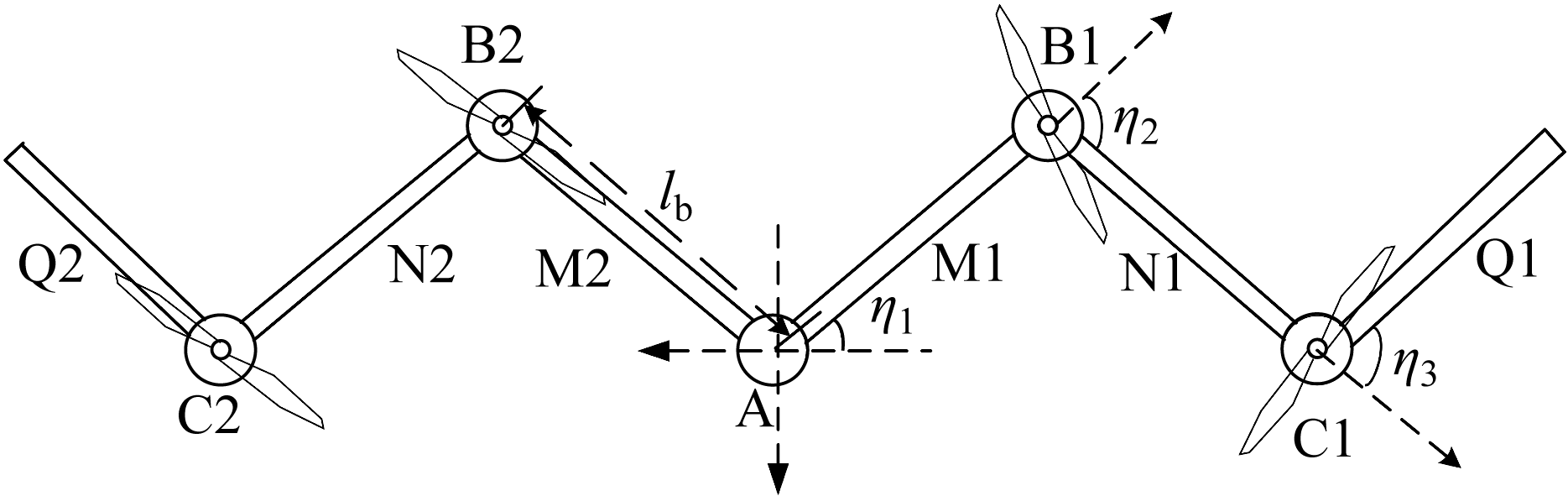
Fig.7
Localized angle of attack in static folding
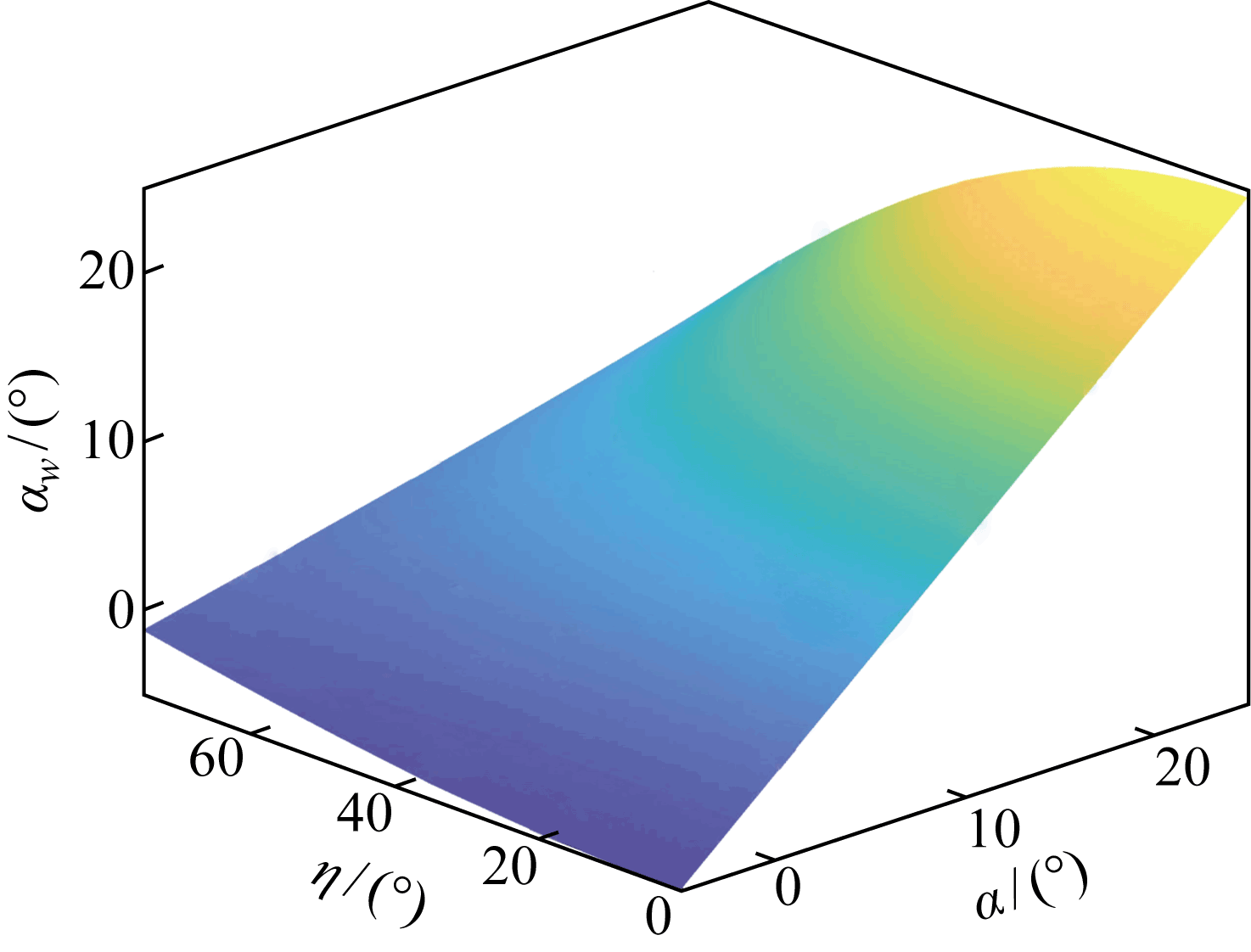

Fig.8
Aerodynamic forces and moments versus angle of approach in centralized deformation
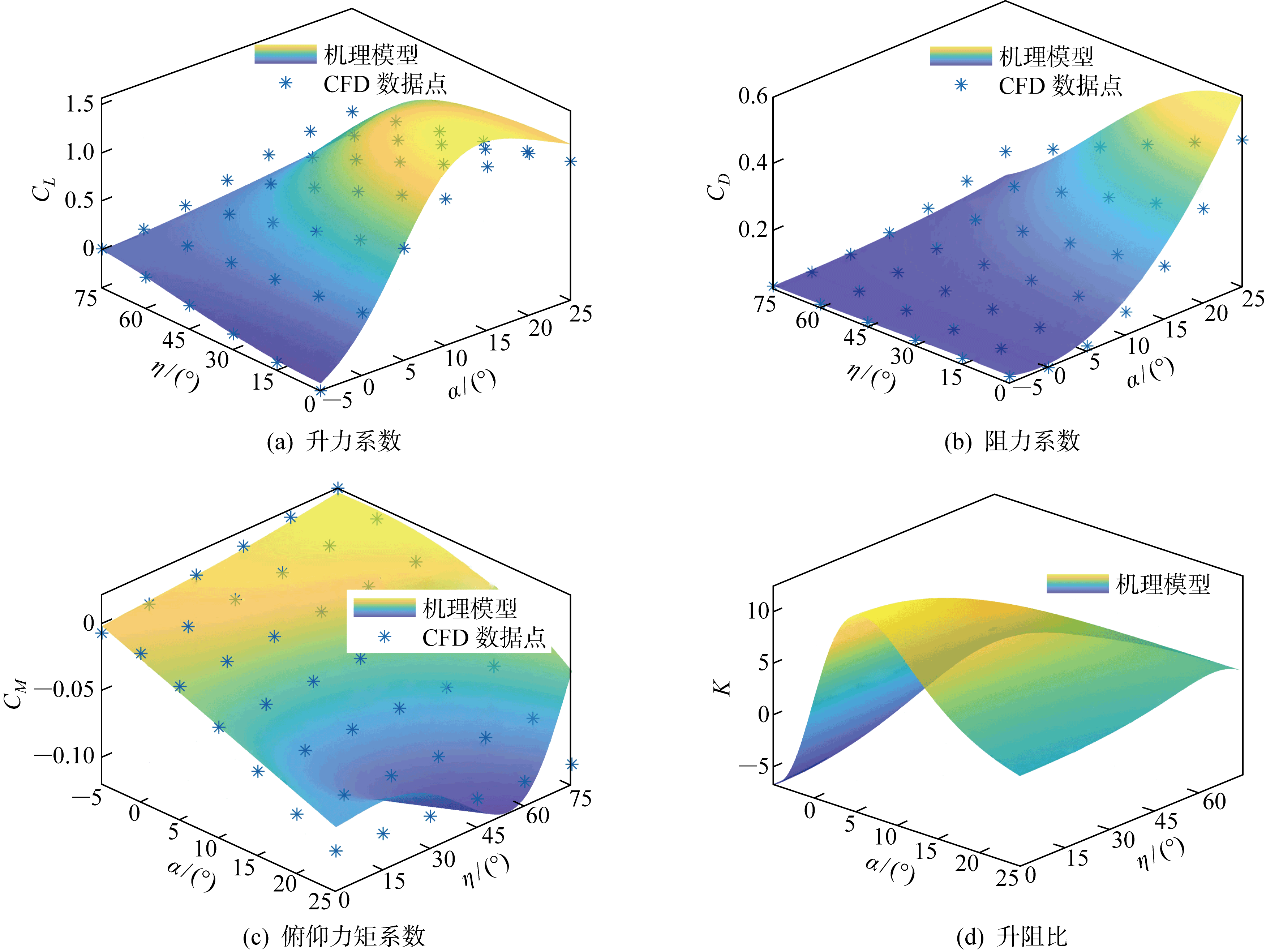
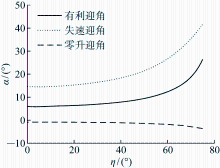
Fig.9
Limit of angle of attack of FWA flight versus deformation
Fig.10
Design of climbing trajectory
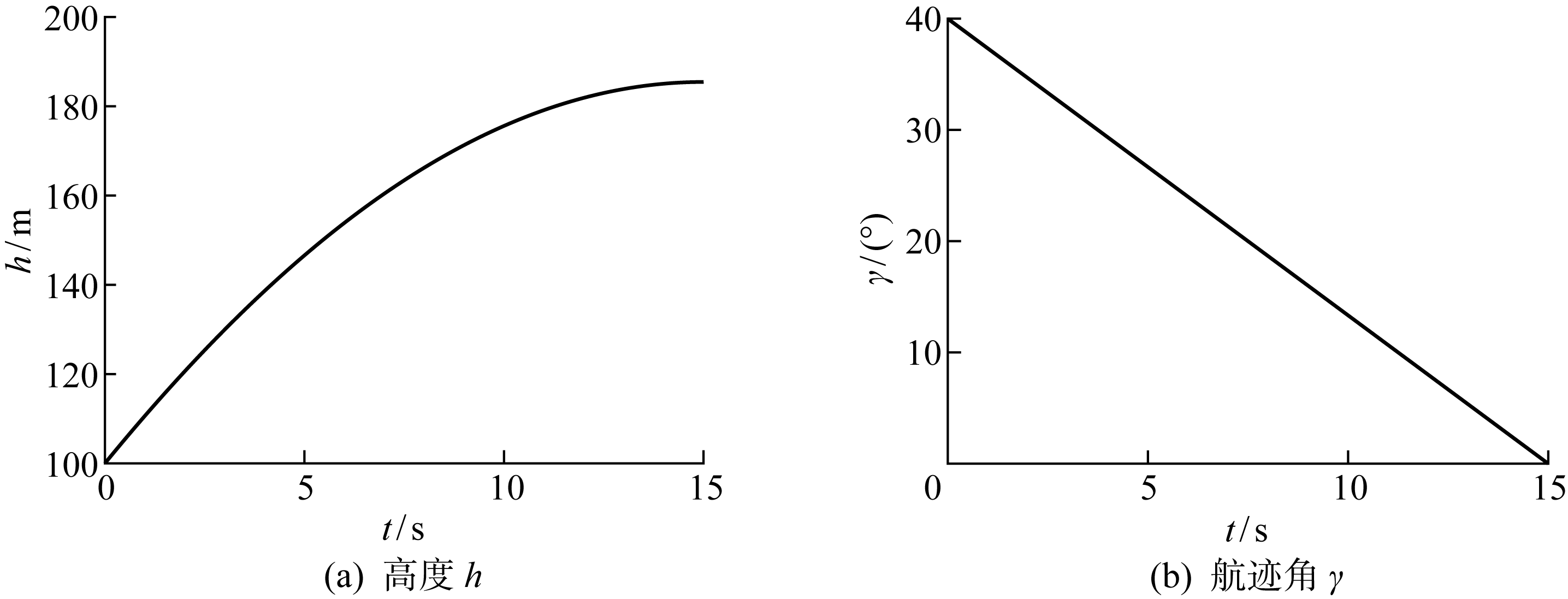
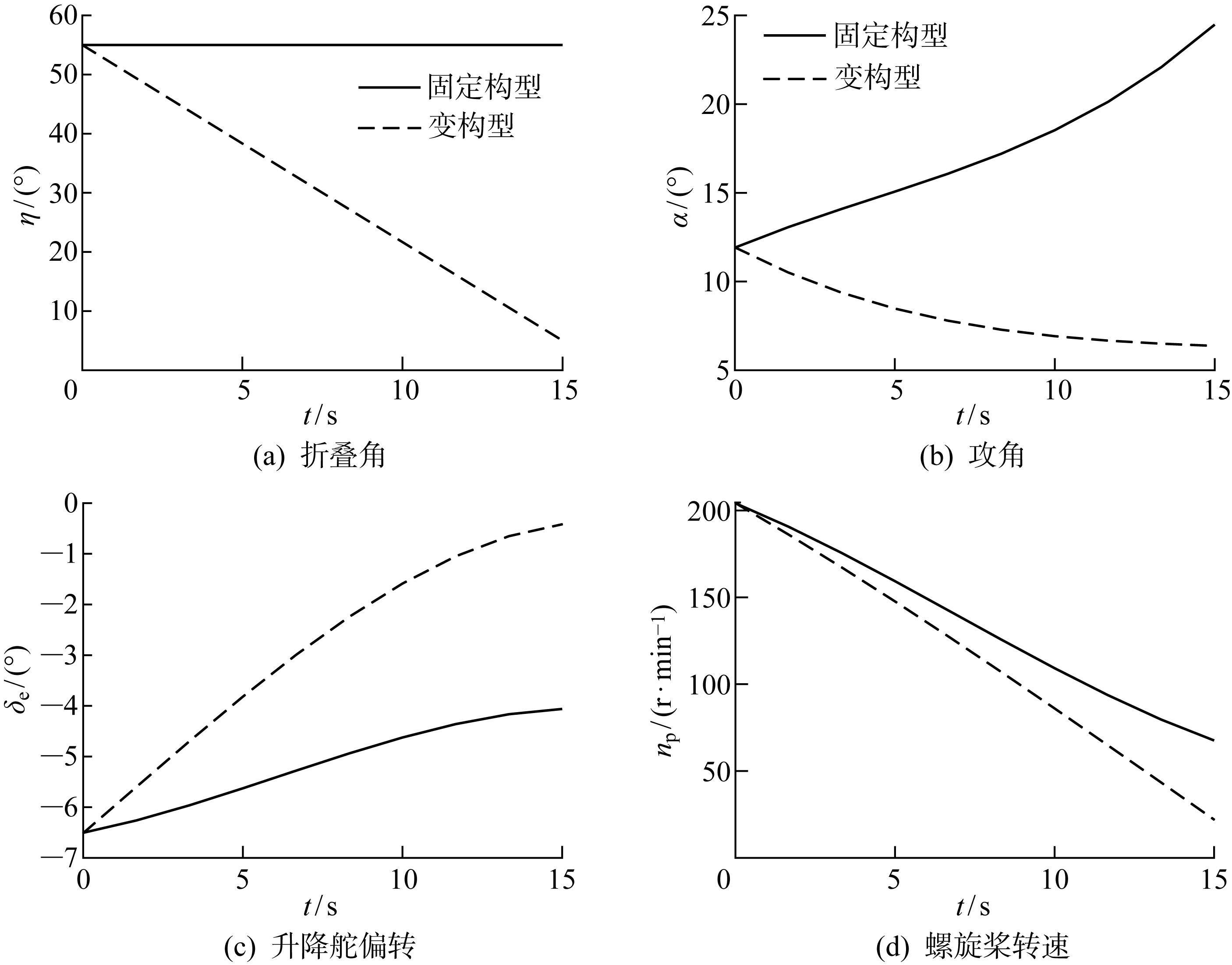
Fig.11
Climbing performance analysis of fixed and variable configurations
Tab.2
Modal analysis of leveling state
| 模态 | 特征值 | 时间常数 | 稳定性 |
|---|---|---|---|
| 短周期模态 | -2.4028±2.4101i | 0.4162 | 稳定 |
| 长周期模态 | 0.0475±0.6737i | 21.0444 | 发散 |
| 折叠模态1 | -2.9714 | 0.3365 | 稳定 |
| 折叠模态2 | 2.6006 | 0.3845 | 发散 |
| 滚转模态 | -5.5187 | 0.1812 | 稳定 |
| 荷兰滚模态 | -0.129±1.2939i | 7.7528 | 稳定 |
| 螺旋模态 | -0.0838 | 11.9370 | 稳定 |
Tab.3
Longitudinal modal eigenvector analysis
| 参数 | 运动模态 | |||
|---|---|---|---|---|
| 短周期 | 长周期 | 折叠模态1 | 折叠模态2 | |
| v | 0.0187 | 0.4206 | 0.0117 | 0.0017 |
| α | 0.4113 | 0.0209 | 0.2562 | 0.1028 |
| q | 0.4038 | 0.1176 | 0.0388 | 0.0011 |
| θ | 0.0176 | 0.4314 | 0.0124 | 0.0001 |
| η | 0.0710 | 0.0040 | 0.3901 | 0.4371 |
| 0.0777 | 0.0055 | 0.2908 | 0.4573 | |
Fig.12
Simulation of open-loop dynamics in symmetric deformation
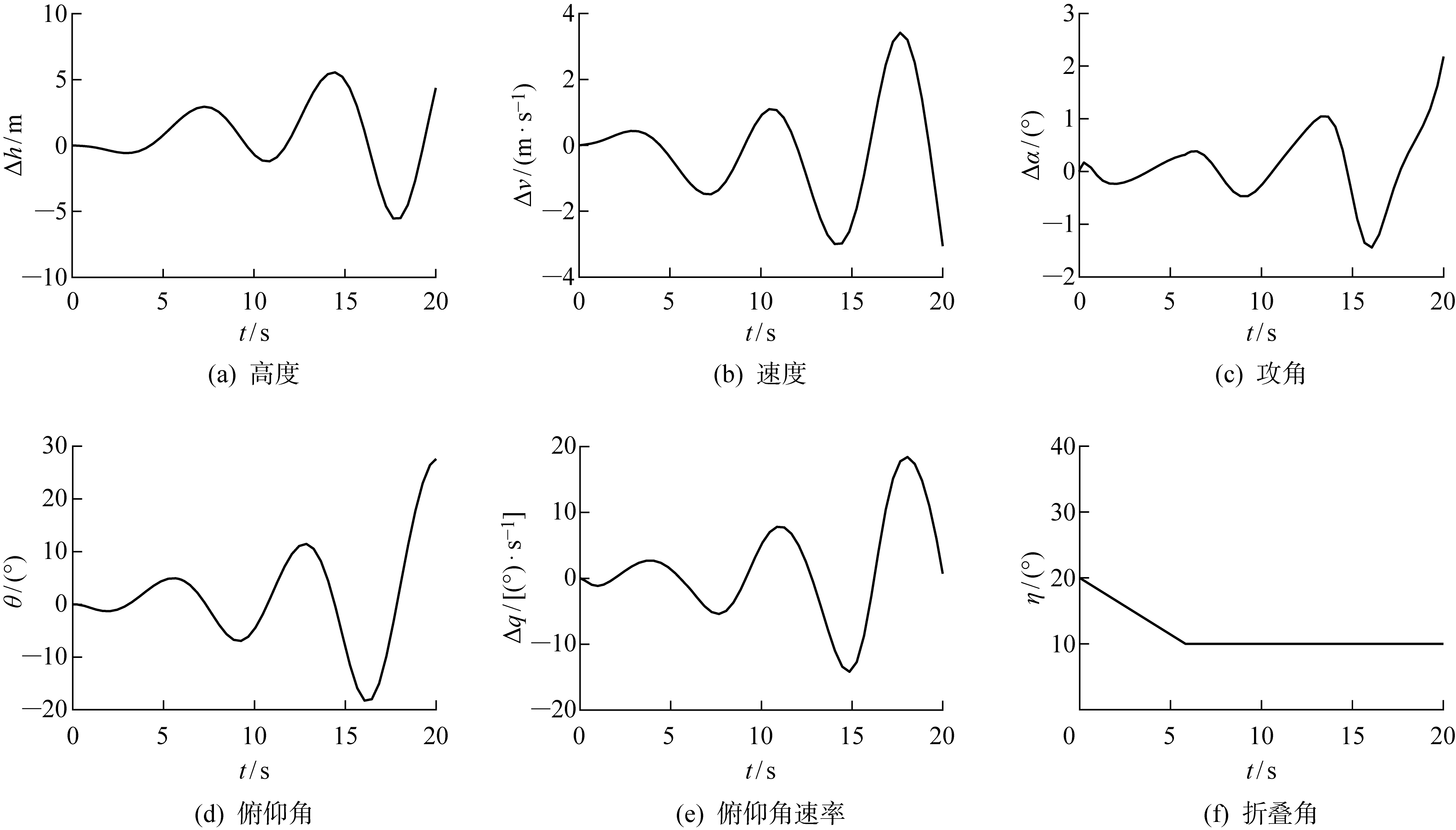
Fig.13
Control structure
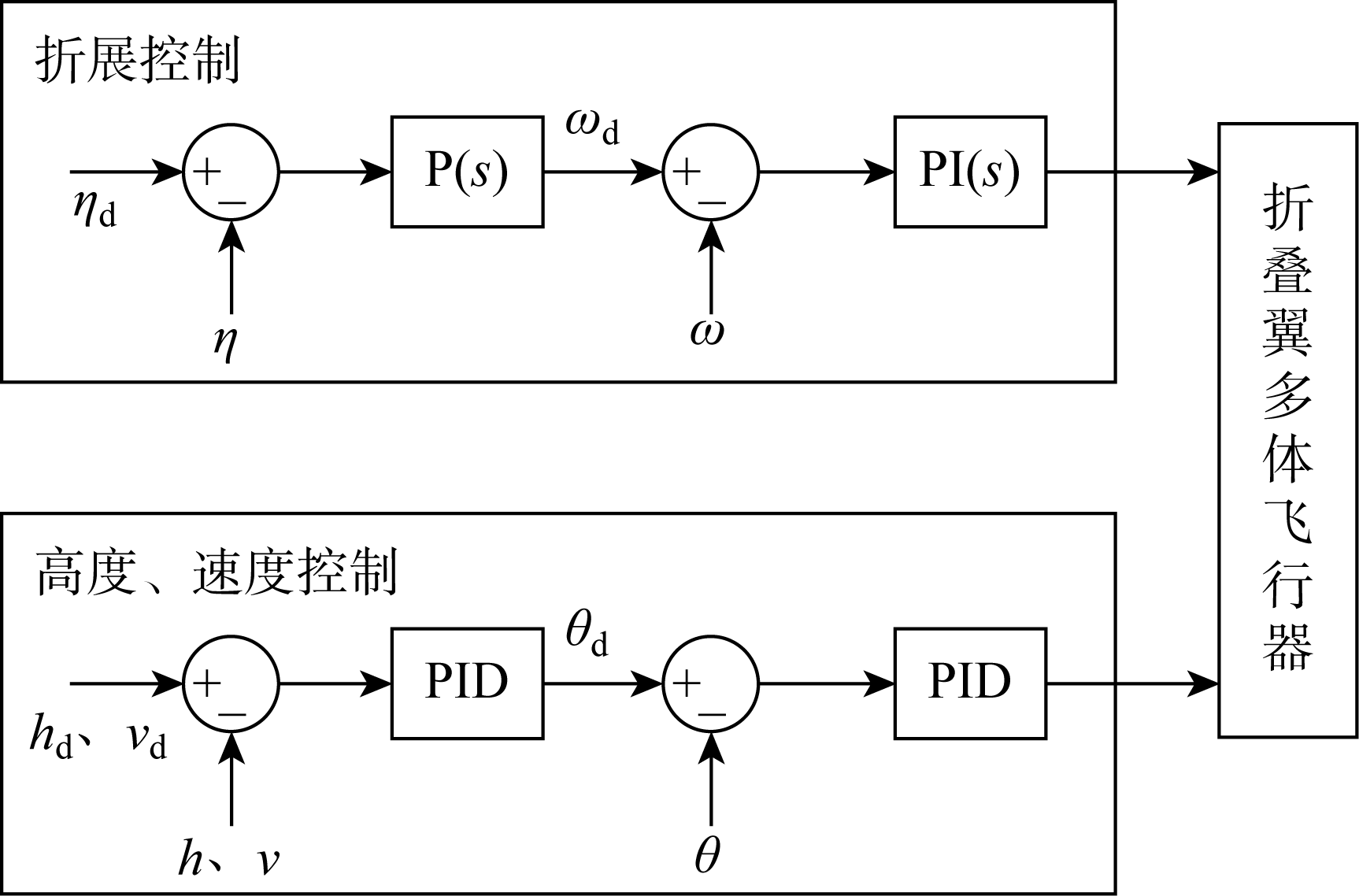
Fig.14
Closed-loop simulation of tilt-shift deformation during climb
| [1] | REHAN M, AKRAM F, SHAHZAD A, et al. Vertical take-off and landing hybrid unmanned aerial vehicles: An overview[J]. The Aeronautical Journal, 2022, 126(1306): 2017-2057. |
| [2] | 韦振鹏, 刘峰, 杨森. 垂直起降固定翼无人机发展现状与技术要点[J]. 飞机设计, 2024, 44(1): 5-13. |
| WEI Zhenpeng, LIU Feng, YANG Sen. Development and key technologies of vertical take-off and landing UAV with fixed wing[J]. Aircraft Design, 2024, 44(1): 5-13. | |
| [3] | CHU L L, LI Q, GU F, et al. Design, modeling, and control of morphing aircraft: A review[J]. Chinese Journal of Aeronautics, 2022, 35(5): 220-246. |
| [4] | MISRA A, JAYACHANDRAN S, KENCHE S, et al. A review on vertical take-off and landing (VTOL) tilt-rotor and tilt wing unmanned aerial vehicles (UAVs)[J]. Journal of Engineering, 2022, 2022: 1803638. |
| [5] | 吴林峰, 李春文. 尾座式垂直起降无人机在时变侧风干扰下的轨迹跟踪控制[J]. 清华大学学报(自然科学版), 2022, 62(1): 179-188. |
| WU Linfeng, LI Chunwen. Position tracking control for a tailsitter VTOL UAV experiencing time-varying crosswind disturbances[J]. Journal of Tsinghua University (Science and Technology), 2022, 62(1): 179-188. | |
| [6] | 程宇轩, 周洲, 王科雷. 分布式推进垂直起降固定翼的过渡走廊边界研究[J]. 西北工业大学学报, 2022, 40(6): 1195-1203. |
| CHENG Yuxuan, ZHOU Zhou, WANG Kelei. Research on transition corridor boundary of distributed propulsion VTOL fixed wing[J]. Journal of Northwestern Polytechnical University, 2022, 40(6): 1195-1203. | |
| [7] | 吴瑷菁. 垂起倾转旋翼无人机过渡模式控制系统设计[D]. 哈尔滨: 哈尔滨工业大学, 2020. |
| WU Aijing. Control system design on transition stage of tilt rotor UAV[D]. Harbin:Harbin Institute of Technology, 2020. | |
| [8] | 王鹏, 陈浩岚, 鲍存余, 等. 变形飞行器建模及控制方法研究综述[J]. 宇航学报, 2022, 43(7): 853-865. |
| WANG Peng, CHEN Haolan, BAO Cunyu, et al. Review on modeling and control methods of morphing vehicle[J]. Journal of Astronautics, 2022, 43(7): 853-865. | |
| [9] | ZHU E T, ZHOU Z, LI H D. Modal analysis and flight validation of compound multi-body aircraft[J]. Aerospace, 2023, 10(5): 442. |
| [10] | 刘东旭, 谢长川, 洪冠新. 翼尖铰接复合飞行器动力学特性研究[J]. 北京航空航天大学学报, 2021, 47(11): 2311-2321. |
| LIU Dongxu, XIE Changchuan, HONG Guanxin. Dynamic characteristics of wingtip-jointed composite aircraft[J]. Journal of Beijing University of Aeronautics & Astronautics, 2021, 47(11): 2311-2321. | |
| [11] | 马仲航, 张执南. 多旋翼无人机遥操机械臂多功能仿真实验平台的设计与实现[J]. 上海交通大学学报, 2020, 54(6): 636-642. |
| MA Zhonghang, ZHANG Zhinan. Design and realization of a versatile simulation platform for telecontrol multi-rotor unmanned aerial vehicle with a robotic arm[J]. Journal of Shanghai Jiao Tong University, 2020, 54(6): 636-642. | |
| [12] | NIU C, YAN X T, CHEN B Y. Control-oriented modeling of a high-aspect-ratio flying wing with coupled flight dynamics[J]. Chinese Journal of Aeronautics, 2023, 36(4): 409-422. |
| [13] | GAO L, JIN H Z, ZHAO J, et al. Flight dynamics modeling and control of a novel catapult launched tandem-wing micro aerial vehicle with variable sweep[J]. IEEE Access, 2018, 6: 42294-42308. |
| [14] | GAO L, ZHU Y H, ZANG X Z, et al. Dynamic analysis and experiment of multiple variable sweep wings on a tandem-wing MAV[J]. Drones, 2023, 7(9): 552. |
| [15] | 邹旭, 刘贞报, 赵闻, 等. 尾座式垂直起降无人机过渡轨迹优化方法研究[J/OL]. 北京航空航天大学学报, https://doi.org/10.13700/j.bh.1001-5965.2023.0458. |
| ZOU Xu, LIU Zhen-bao, ZHAO Wen, et al. Optimization method of transition trajectory for tail-sitter unmanned aerial vehicles[J/OL]. Journal of Beijing University of Aeronautics & Astronautics. https://doi.org/10.13700/j.bh.1001-5965.2023.0458. | |
| [16] | DAUD FILHO A C, BELO E M. A tilt-wing VTOL UAV configuration: Flight dynamics modelling and transition control simulation[J]. The Aeronautical Journal, 2024, 128(1319): 152-177. |
| [17] | PEDRO S, TOMÁS D, LOBO DO VALE J, et al. Design and performance quantification of VTOL systems for a canard aircraft[J]. The Aeronautical Journal, 2021, 125(1292): 1768-1791. |
| [18] | 程子欢, 裴海龙. 涵道尾座式垂直起降飞行器全包线飞行控制[J]. 控制理论与应用, 2021, 38(11): 1863-1873. |
| CHENG Zihuan, PEI Hailong. A full envelope flight controller for ducted fan tail sitter vertical take-off and landing[J]. Control Theory & Applications, 2021, 38(11): 1863-1873. | |
| [19] | DENG X F, HUANG Y Q, XU B Z, et al. Position and attitude tracking finite-time adaptive control for a VTOL aircraft using global fast terminal sliding mode control[J]. Mathematics, 2023, 11(12): 27-32. |
| [20] | 夏济宇, 周洲, 王正平, 等. 基于NLESO的倾转动力无人机垂直起降模态轨迹跟踪控制[J]. 西北工业大学学报, 2023, 41(1): 1-10. |
| XIA Jiyu, ZHOU Zhou, WANG Zhengping, et al. Trajectory tracking control of tilt-propulsion UAV vertical take-off and landing mode based on NLESO[J]. Journal of Northwestern Polytechnical University, 2023, 41(1): 1-10. | |
| [21] | 曹煜琪, 付皓然, 高飞, 等. 基于MPCC的鸭翼尾座式垂直起降无人机轨迹跟踪控制算法[J]. 航空学报, 2023, 44 (Sup.2): 501-511. |
| CAO Yuqi, FU Haoran, GAO Fei, et al. Trajectory tracking control algorithm for canard-equipped tail-sitting vertical takeoff and landing UAV based on MPCC[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44 (Sup.2): 501-511. | |
| [22] | WEI Q L, YANG Z S, SU H Z, et al. Online adaptive dynamic programming for optimal self-learning control of VTOL aircraft systems with disturbances[J]. IEEE Transactions on Automation Science & Engineering, 2024, 21(1): 343-352. |
| [23] | MEIROVITCH L, STEMPLE T. Hybrid equations of motion for flexible multibody systems using quasicoordinates[J]. Journal of Guidance, Control, & Dynamics, 1995, 18(4): 678-688. |
| [24] | 蒋国江. 扑翼变形飞行器的动力学建模与飞行仿真[D]. 长沙: 国防科学技术大学, 2015. |
| JIANG Guojiang. Dynamic modeling and flight simulation of flapping wing aerocraft[D]. Changsha: National University of Defense Technology, 2015. | |
| [25] | 安朝, 谢长川, 孟杨, 等. 多体组合式无人机飞行力学稳定性分析及增稳控制研究[J]. 工程力学, 2021, 38(11): 248-256. |
| AN Chao, XIE Changchuan, MENG Yang, et al. Flight dynamics and stable control analyses of multi-body aircraft[J]. Engineering Mechanics, 2021, 38(11): 248-256. | |
| [26] |
杜万闪, 周洲, 拜昱, 等. 组合式飞行器多体动力学建模与飞行力学特性[J]. 兵工学报, 2023, 44(8): 2245-2262.
doi: 10.12382/bgxb.2022.0282 |
|
DU Wanshan, ZHOU Zhou, BAI Yu, et al. Study on multibody dynamics modeling and flight dynamic characteristics of combined aircraft[J]. Acta Armamentarii, 2023, 44(8): 2245-2262.
doi: 10.12382/bgxb.2022.0282 |
|
| [27] | MENG Y, AN C, XIE C C, et al. Conceptual design and flight test of two wingtip-docked multi-body aircraft[J]. Chinese Journal of Aeronautics, 2022, 35(12): 144-155. |
| [28] | 刘志豪, 闵荣, 方成, 等. 多飞行模式垂直起降无人机过渡飞行控制策略[J]. 上海交通大学学报, 2019, 53(10): 1173-1181. |
| LIU Zhihao, MIN Rong, FANG Cheng, et al. Transition flight control strategy of multiple flight mode vertical take-off and landing unmanned aerial vehicle[J]. Journal of Shanghai Jiao Tong University, 2019, 53(10): 1173-1181. |
| [1] | SHEN Bing, CHAI Wei, WANG Kai, LI Xiaoyuan, LÜ Jing. Oscillation Suppression Method of Power Electronic Alternating Current Distribution System Based on Weak Point Location [J]. Journal of Shanghai Jiao Tong University, 2026, 60(1): 32-41. |
| [2] | GAO Lei, MA Junchao, LÜ Jing, LIU Jianing, WANG Chenxu, CAI Xu. Oscillatory Stability Assessment of Renewable Power Systems Based on Frequency-Domain Modal Analysis [J]. Journal of Shanghai Jiao Tong University, 2025, 59(6): 821-835. |
| [3] | ZONG Haoxiang, ZHANG Chen, BAO Yanhong, WU Feng, CAI Xu. Frequency-Domain Modeling and Synchronization Perspective Interaction Mechanism of GFL-GFM Converter System [J]. Journal of Shanghai Jiao Tong University, 2025, 59(2): 151-164. |
| [4] | YANG Taibo, LIU Jiaxin, PENG Zhike, LUO Neng, LIU Caixue. Relaxation Characteristics of Hold-Down Spring of Core Support Barrel in Nuclear Reactor [J]. Journal of Shanghai Jiao Tong University, 2024, 58(8): 1290-1296. |
| [5] | ZHANG Weizhen, HE Zhen, TANG Zhangfan. Reinforcement Learning Control Design for Perching Maneuver of Unmanned Aerial Vehicles with Wind Disturbances [J]. Journal of Shanghai Jiao Tong University, 2024, 58(11): 1753-1761. |
| [6] | CHENG Shuai, LI Chen, ZHANG Yilun, TANG Chao, MENG Xianghui, XIE Youbai. A Forward Development Method for Functional Design of Civil Aircraft Flight Control System [J]. Journal of Shanghai Jiao Tong University, 2023, 57(10): 1305-1315. |
| [7] | YANG Shu, QIAN Yunxiao, YANG Ting. Linear Parameter-Varying Integrated Control Law Design for a Hypersonic Vehicle [J]. Journal of Shanghai Jiao Tong University, 2022, 56(11): 1427-1437. |
| [8] | TAN Xue, ZHANG Chen, XU Wenhao, WANG Fuxin, WEN Minhua. Unsteadiness and Modal Analysis of Ridge Ice-Induced Separation in Post-Stall Conditions via IDDES [J]. Journal of Shanghai Jiao Tong University, 2021, 55(11): 1333-1342. |
| [9] | GAO Zhifa (高志发), CHEN Qiang (陈强), WU Jianxin (武建新), LIU Xiaoyu (刘晓宇). Key-Component Force and Modal Analysis of Chamfering Machine for Curved Side-Shaped Ice Spoon [J]. Journal of Shanghai Jiao Tong University (Science), 2020, 25(2): 230-236. |
| [10] |
WANG Yibo1,HUANG Yixiang1,LI Bingchu1,LING Xiao1 ZHAO Shuai1,LIU Chengliang1,ZHANG Daqing2.
An Improved Modal Simulation Method for Switched Reluctance Motor Based on Static PreComputation [J]. Journal of Shanghai Jiao Tong University, 2017, 51(10): 1181-1188. |
| [11] | LIU Xiaodong,ZHONG Maiying,LIU Hai. EKF-Based Fault Detection of Unmanned Aerial Vehicle Flight Control System [J]. Journal of Shanghai Jiaotong University, 2015, 49(06): 884-888. |
| [12] |
SUN Xiaozhe,LI Weiqi,CHEN Zongji . Hierarchical Hybrid Reliability Modeling Method for Flight Control Computer System [J]. Journal of Shanghai Jiaotong University, 2011, 45(02): 277-0283. |
| [13] |
DONG Jinglong,TAO Jianfeng,LIU Chengliang . Modal and Deformation Analysis of Dualmotor Driving Turntable’s Middle Frame [J]. Journal of Shanghai Jiaotong University, 2010, 44(08): 1130-1134. |
| [14] | XU Zheng,WANG Dezhong,ZHANG Jige,ZHOU Wenxia(. Analysis for Vibration and Noise Problem of Main Steam Isolation Valve with Pipelines [J]. Journal of Shanghai Jiaotong University, 2010, 44(01): 95-0100. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||