Journal of Shanghai Jiao Tong University ›› 2024, Vol. 58 ›› Issue (11): 1783-1797.doi: 10.16183/j.cnki.jsjtu.2024.209
Special Issue: 制导、导航与控制
• Guidance, Navigation and Control • Previous Articles Next Articles
CAO Kai1,2( ), CHEN Yangquan2, LI Kang1, CHEN Chaobo1, YAN Kun1, LIU Weichao1
), CHEN Yangquan2, LI Kang1, CHEN Chaobo1, YAN Kun1, LIU Weichao1
Received:2024-06-06
Revised:2024-06-22
Accepted:2024-06-24
Online:2024-11-28
Published:2024-12-02
CLC Number:
CAO Kai, CHEN Yangquan, LI Kang, CHEN Chaobo, YAN Kun, LIU Weichao. Dynamic Density-Guided Method for Multi-Robot Formation Transformation[J]. Journal of Shanghai Jiao Tong University, 2024, 58(11): 1783-1797.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2024.209
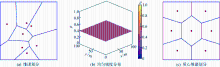
Fig.1
Voronoi tessellation and centroidal Voronoi tessellation
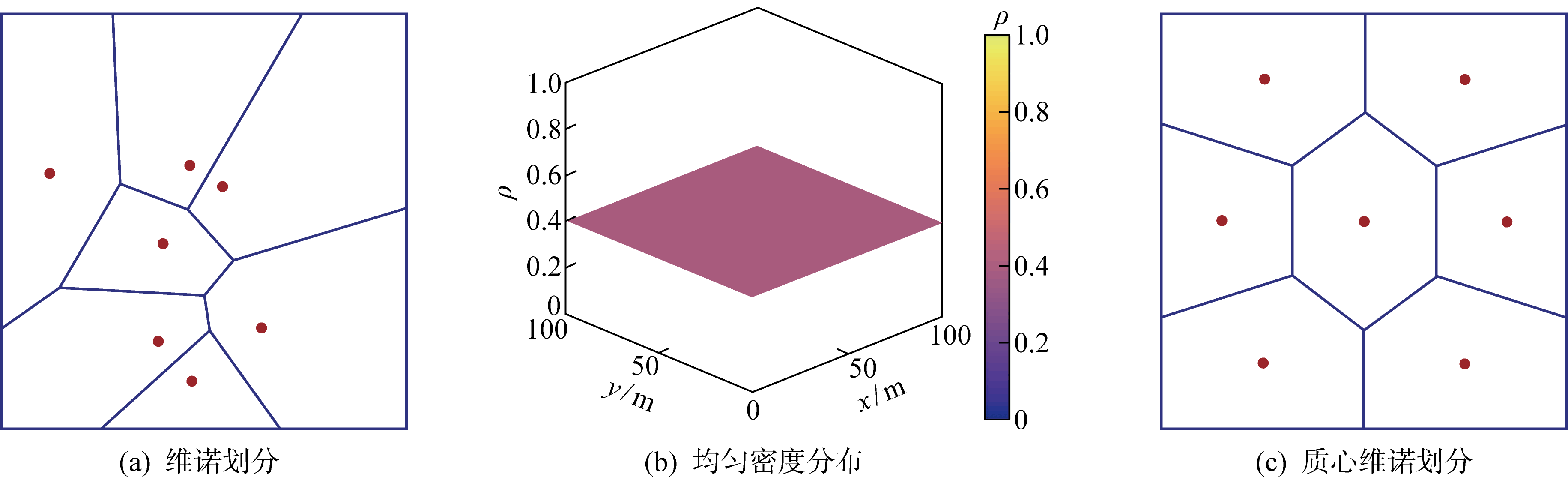
Tab.1
Relationship between density function and Voronoi diagram
| ρ(q) | 密度分布 | 维诺图 | 队形 |
|---|---|---|---|
| $\mathrm{e}^{-\sigma(a x+b y+c)^{2}}$ |  |  | 直线形 |
| $\mathrm{e}^{-\sigma\left[a\left|x-x_{\mathrm{c}}\right|+b\left(y-y_{\mathrm{c}}\right)+c\right]^{2}}$ |  | 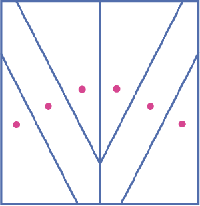 | V形 |
| $\mathrm{e}^{-\sigma\left[a\left(x-x_{\mathrm{c}}\right)^{2}+b\left(y-y_{\mathrm{c}}\right)^{2}-r^{2}\right]^{2}}$ |  |  | 环形 |
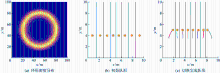
Fig.2
Switching ring formation
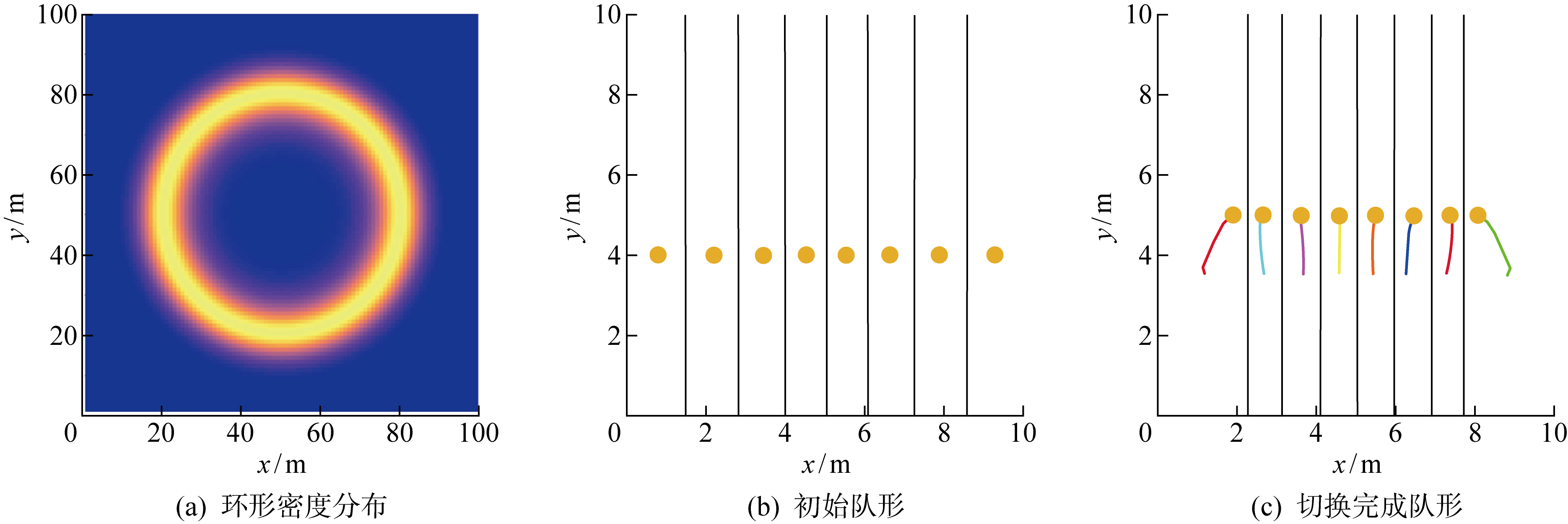
Fig.3
Shape interpolation of density function
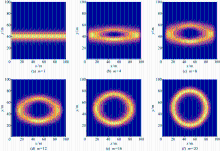
Fig.4
Dynamic transition from linear density distribution to annular density distribution
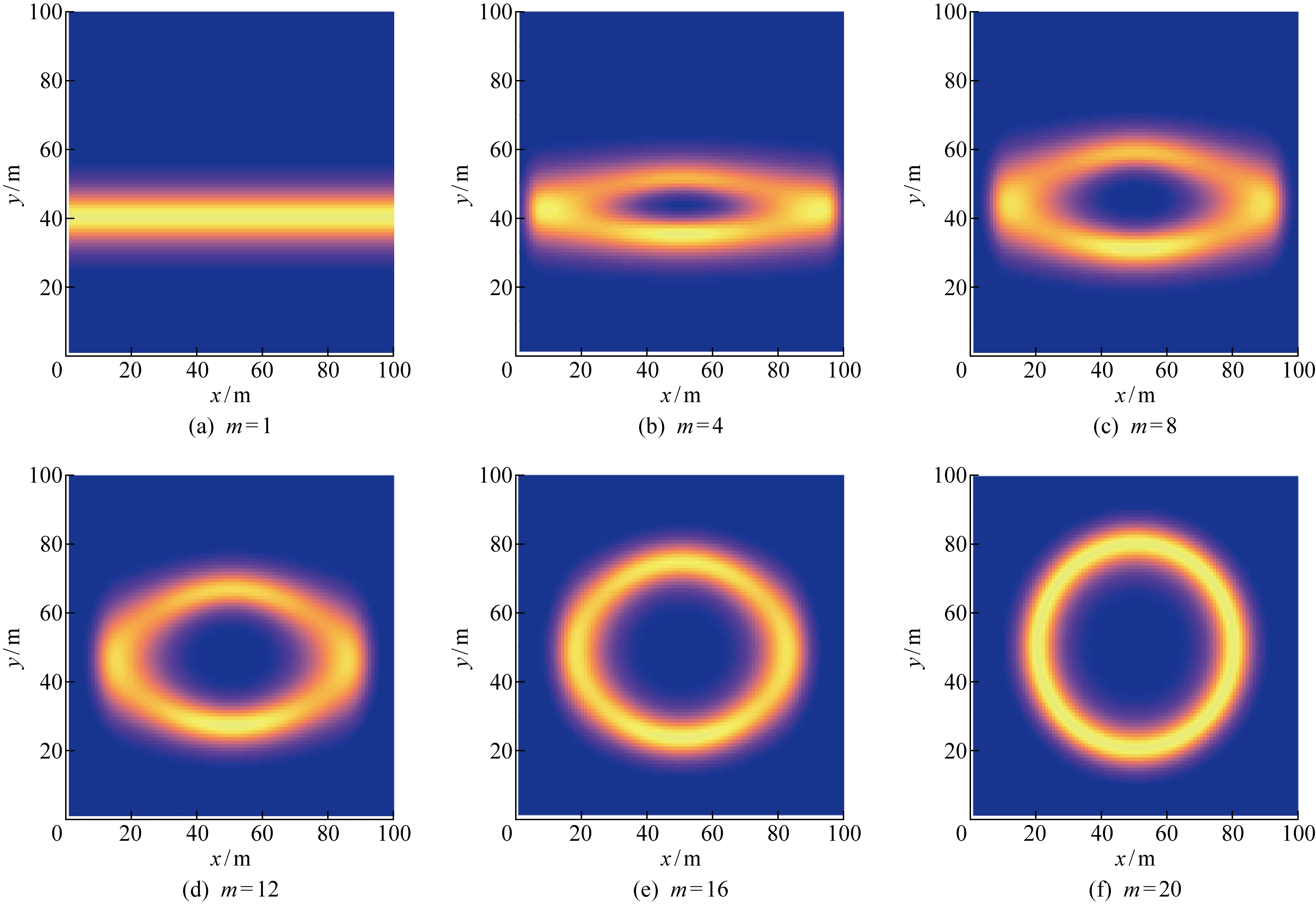
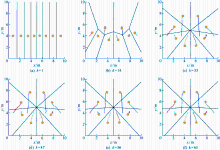
Fig.5
Dynamic density guided formation switching process of Simulation 1
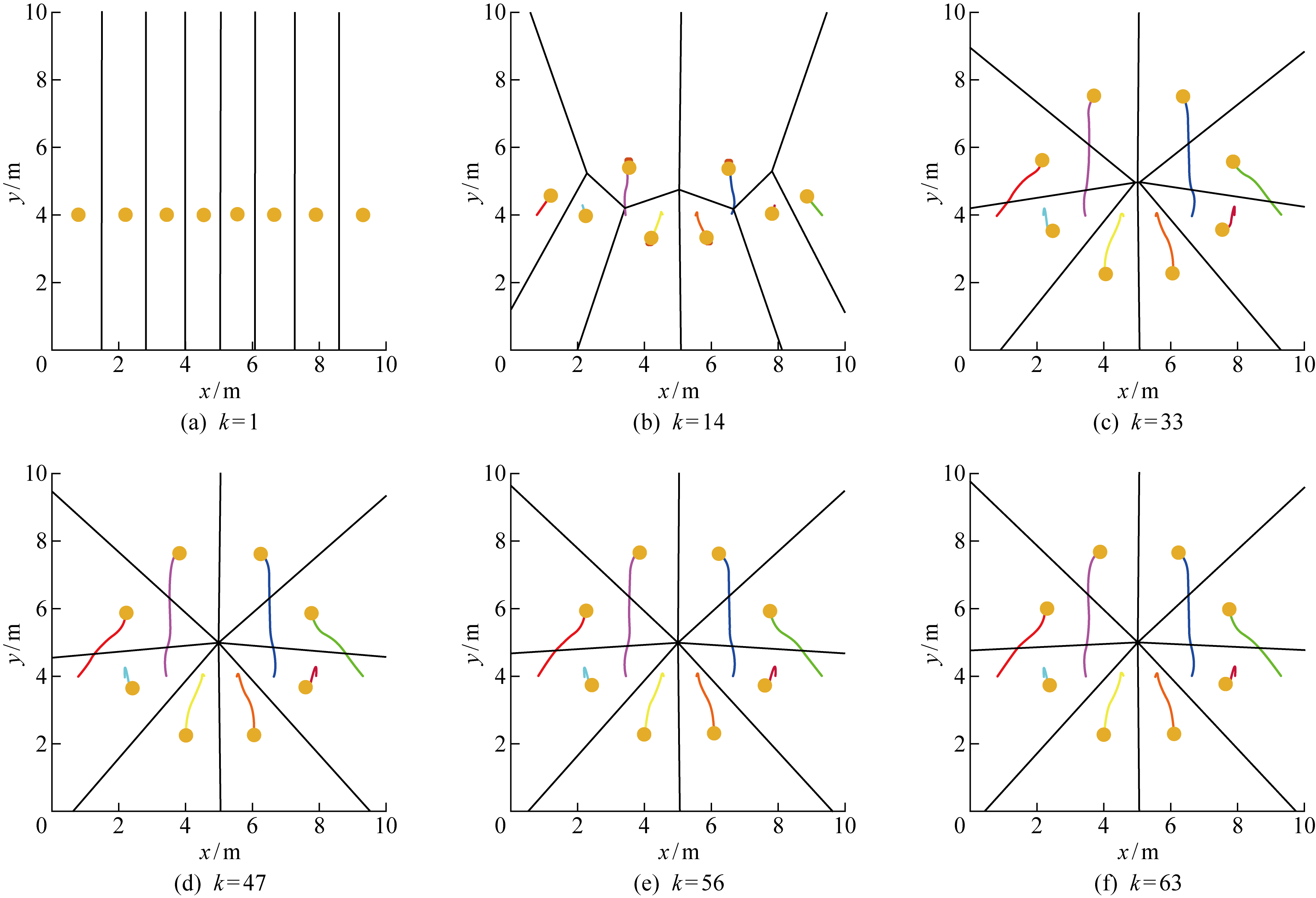
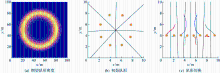
Fig.6
Formation switching directly guided by linear density function
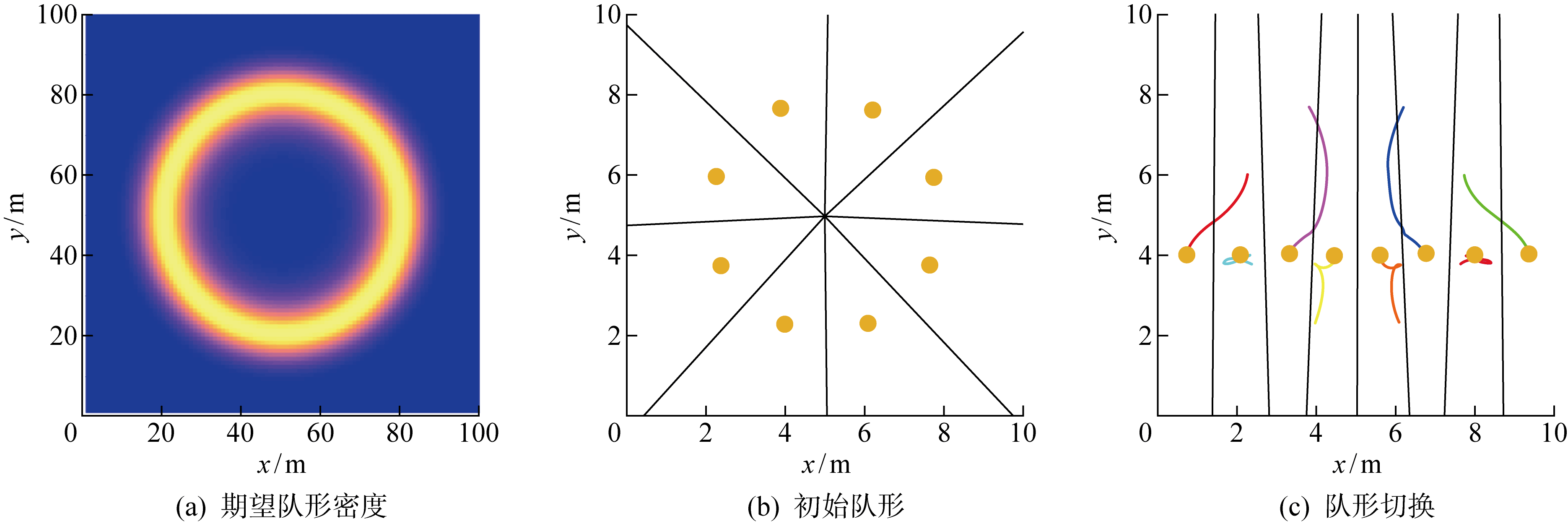
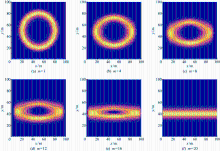
Fig.7
Dynamic transition from annular density distribution to linear density distribution
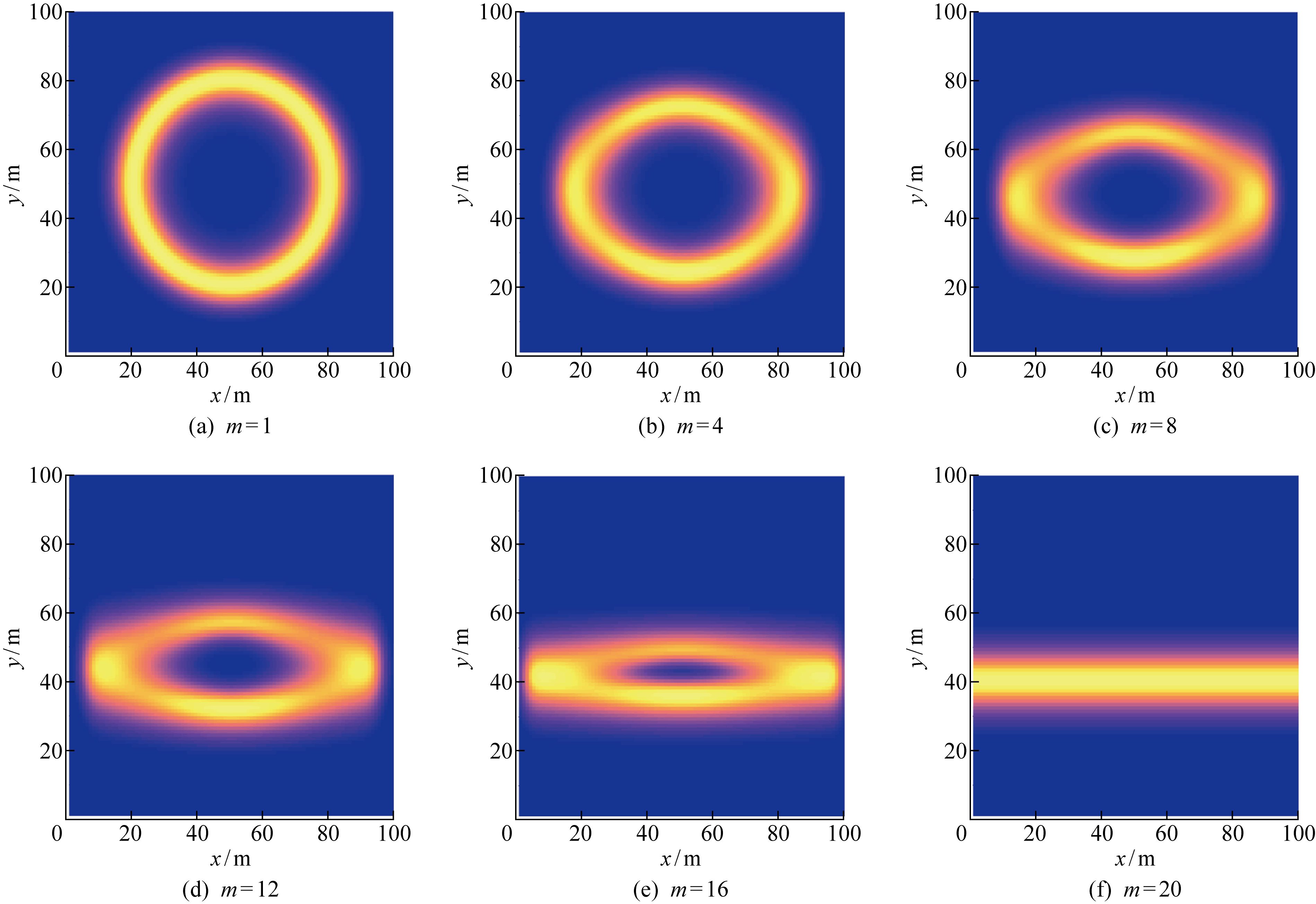
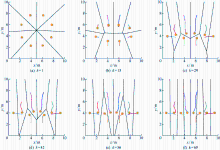
Fig.8
Dynamic density guided formation switching process of Simulation 2
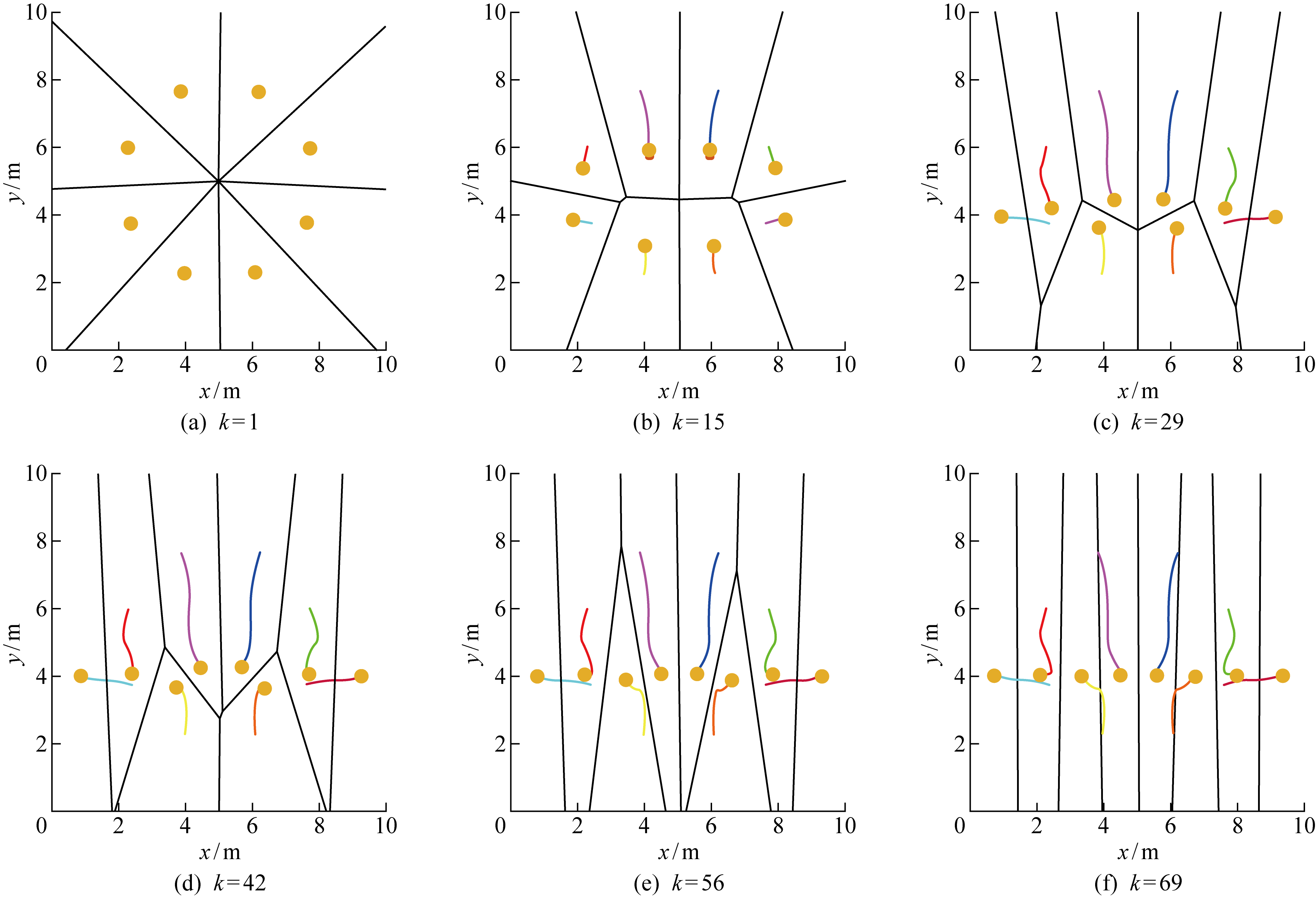
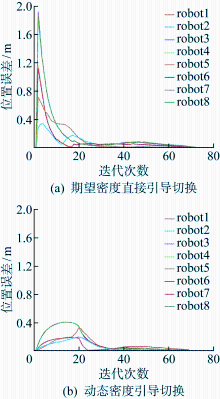
Fig.9
Robot position error in formation switching process of Simulation 2

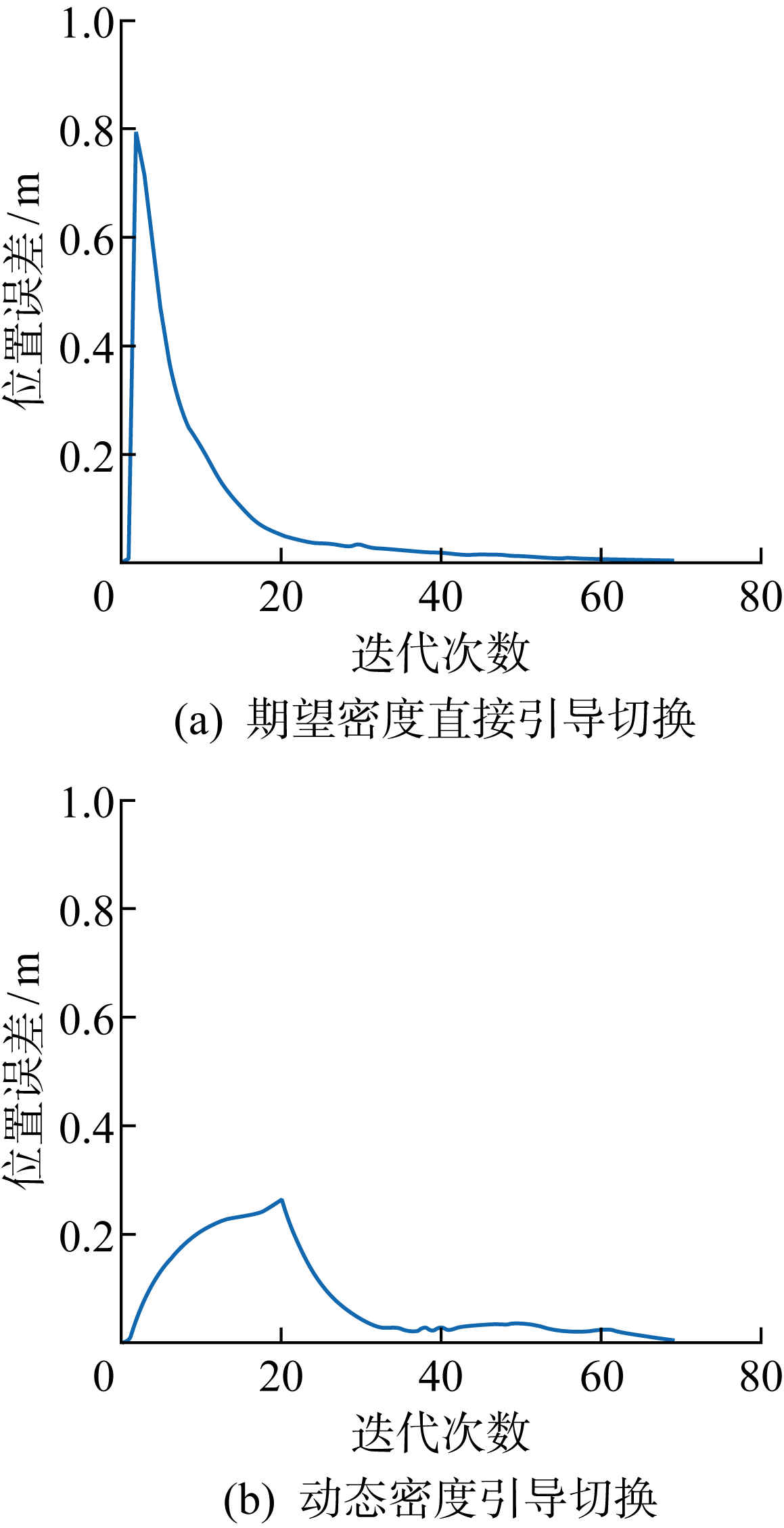
Fig.10
Robot cost function of formation switching process in Simulation 2
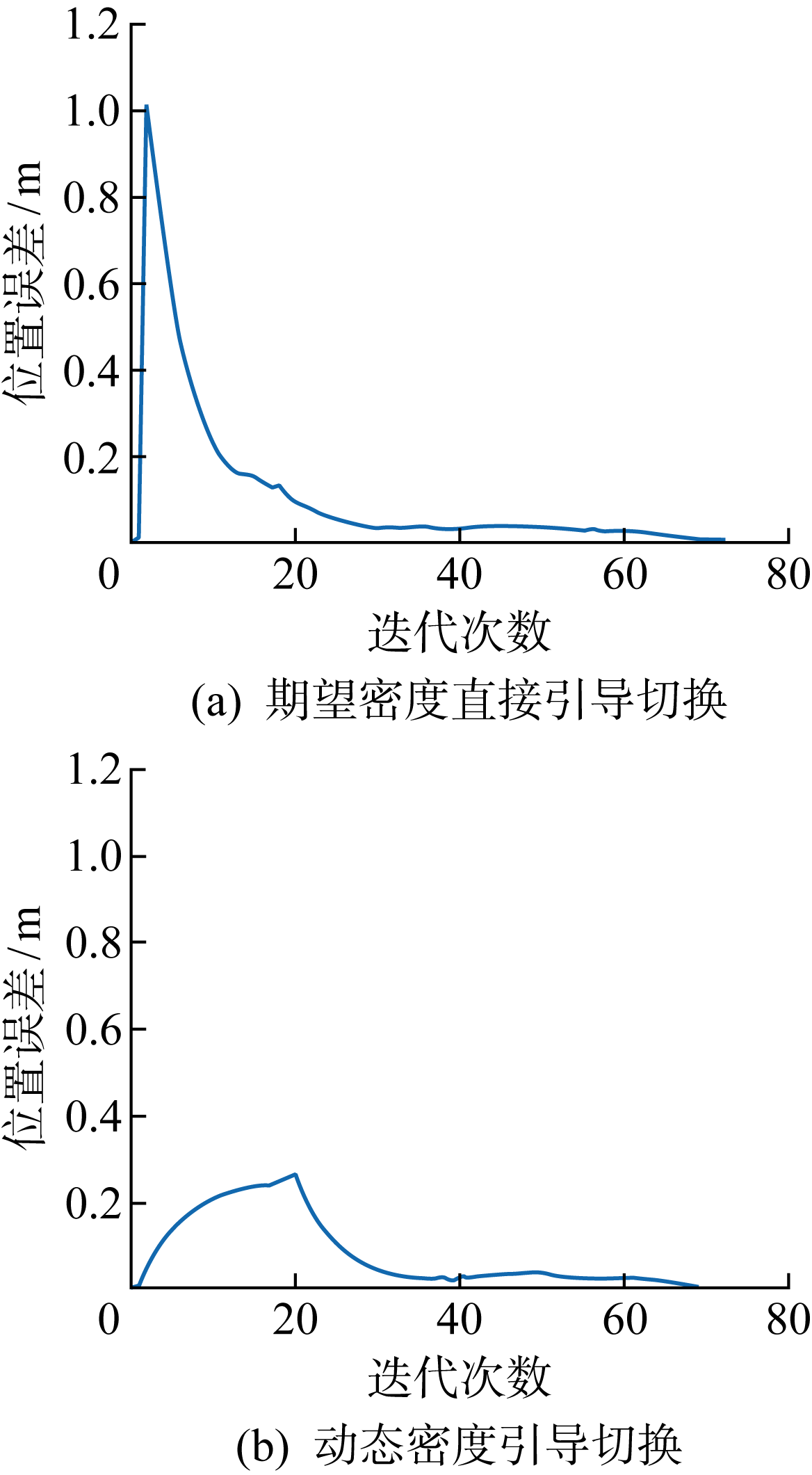
Fig.11
Desired density directly guided formation splitting
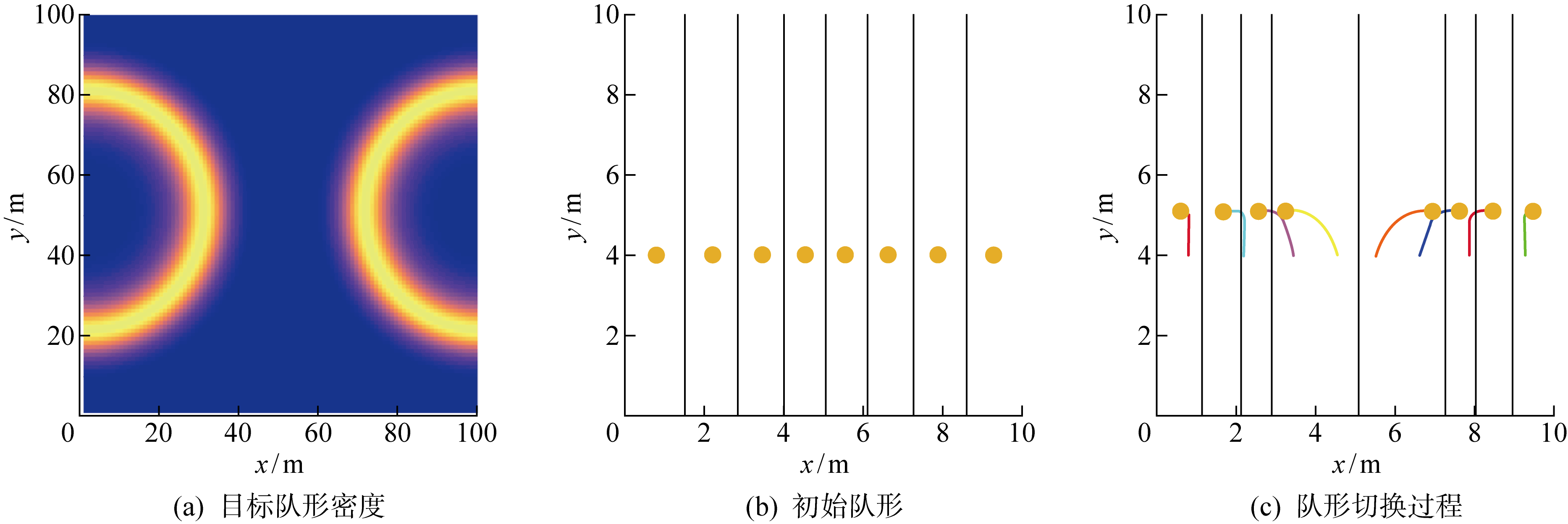
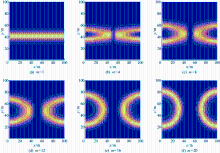
Fig.12
Dynamic transition from linear density distribution to expected density distribution
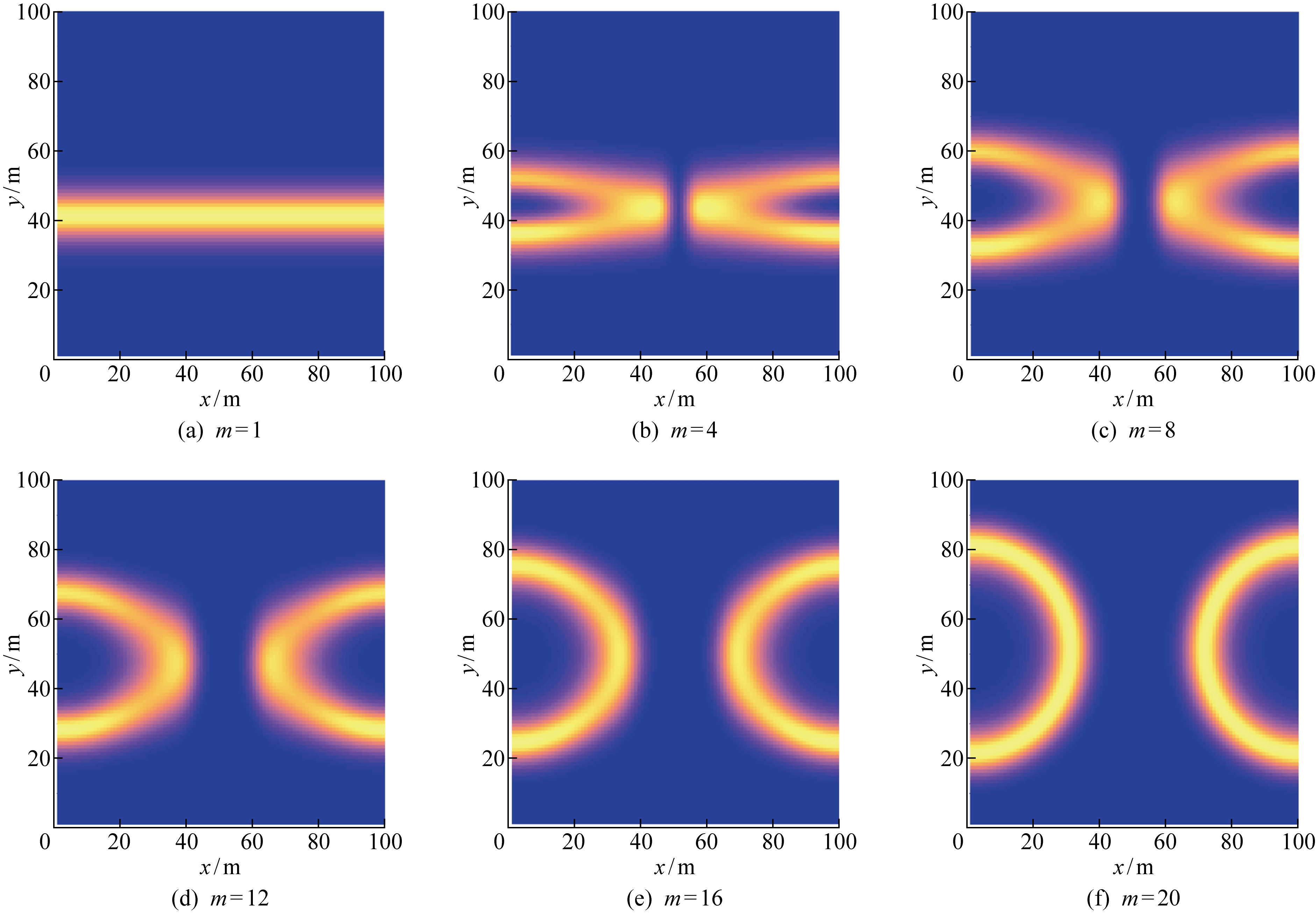
Fig.13
Dynamic density guided formation splitting process
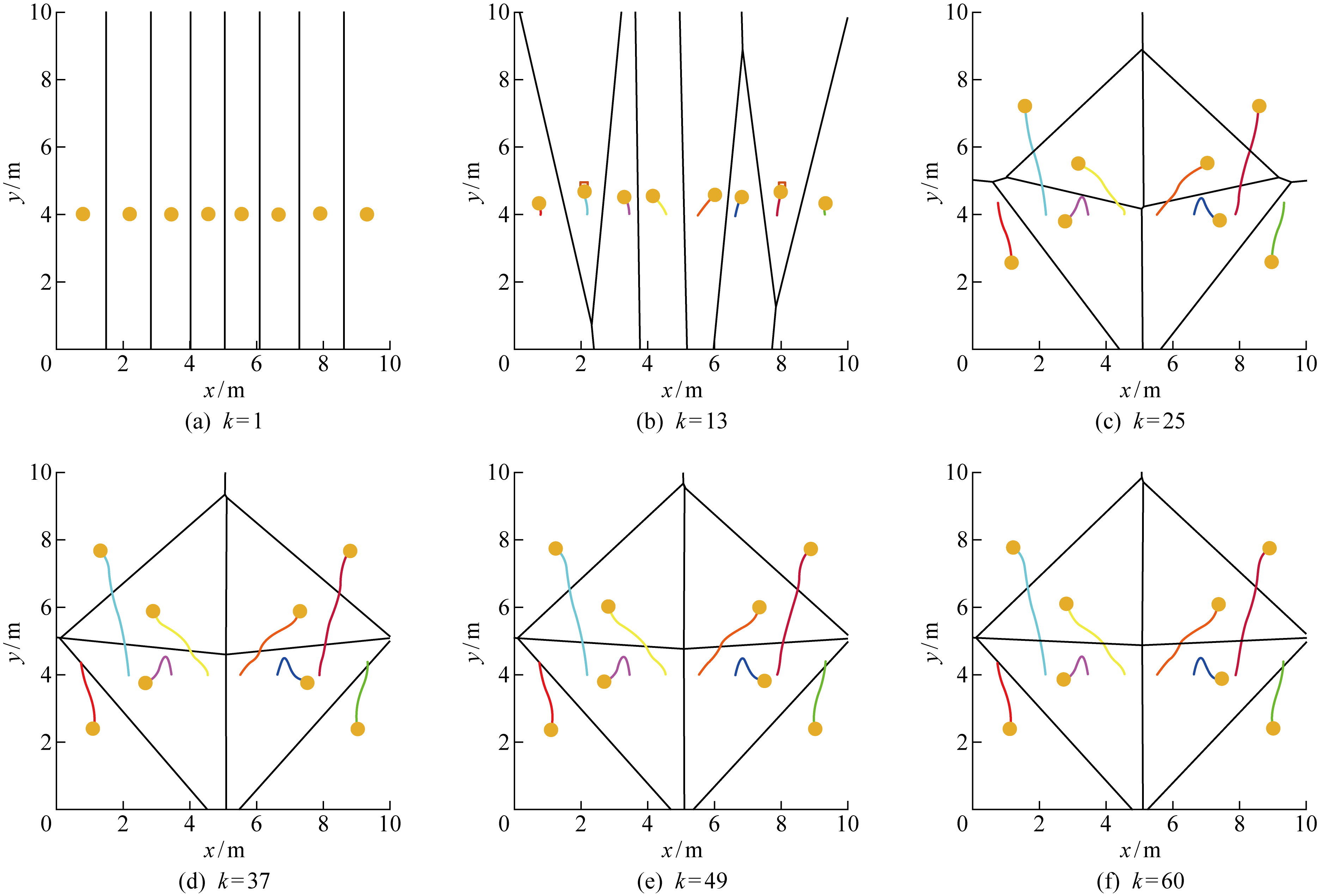
Fig.14
Direct formation merging guided by annular density function
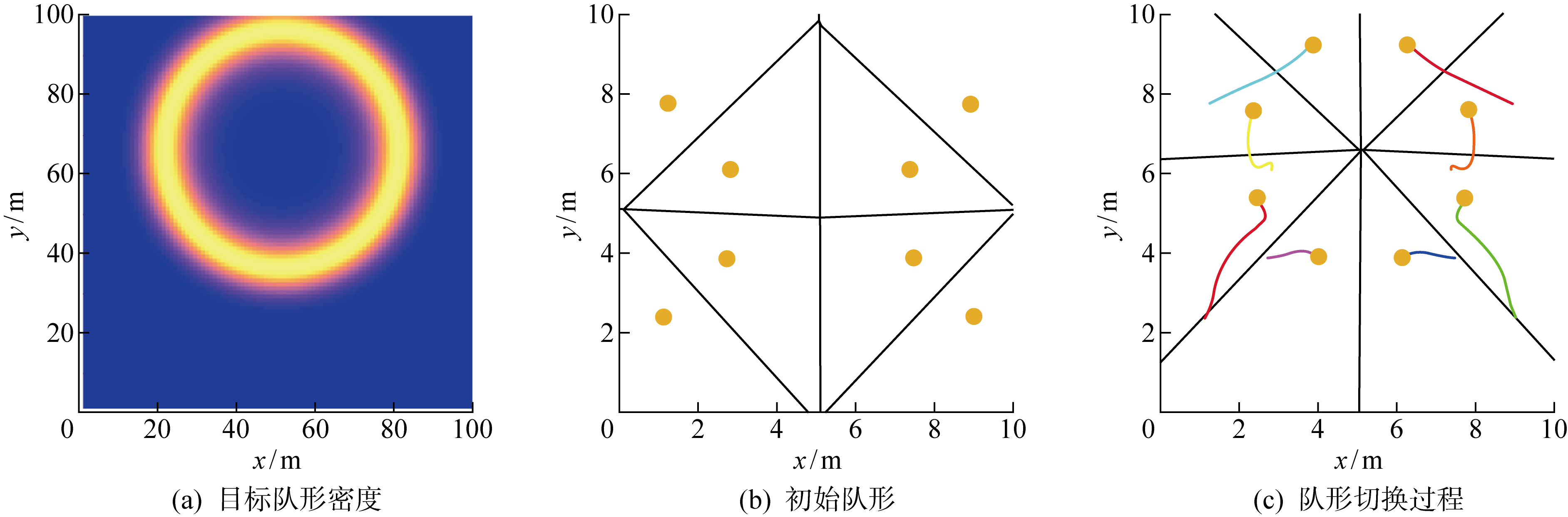
Fig.15
Dynamic transition from initial formation density distribution to annular density distribution

Fig.16
Dynamic density guided formation merging process
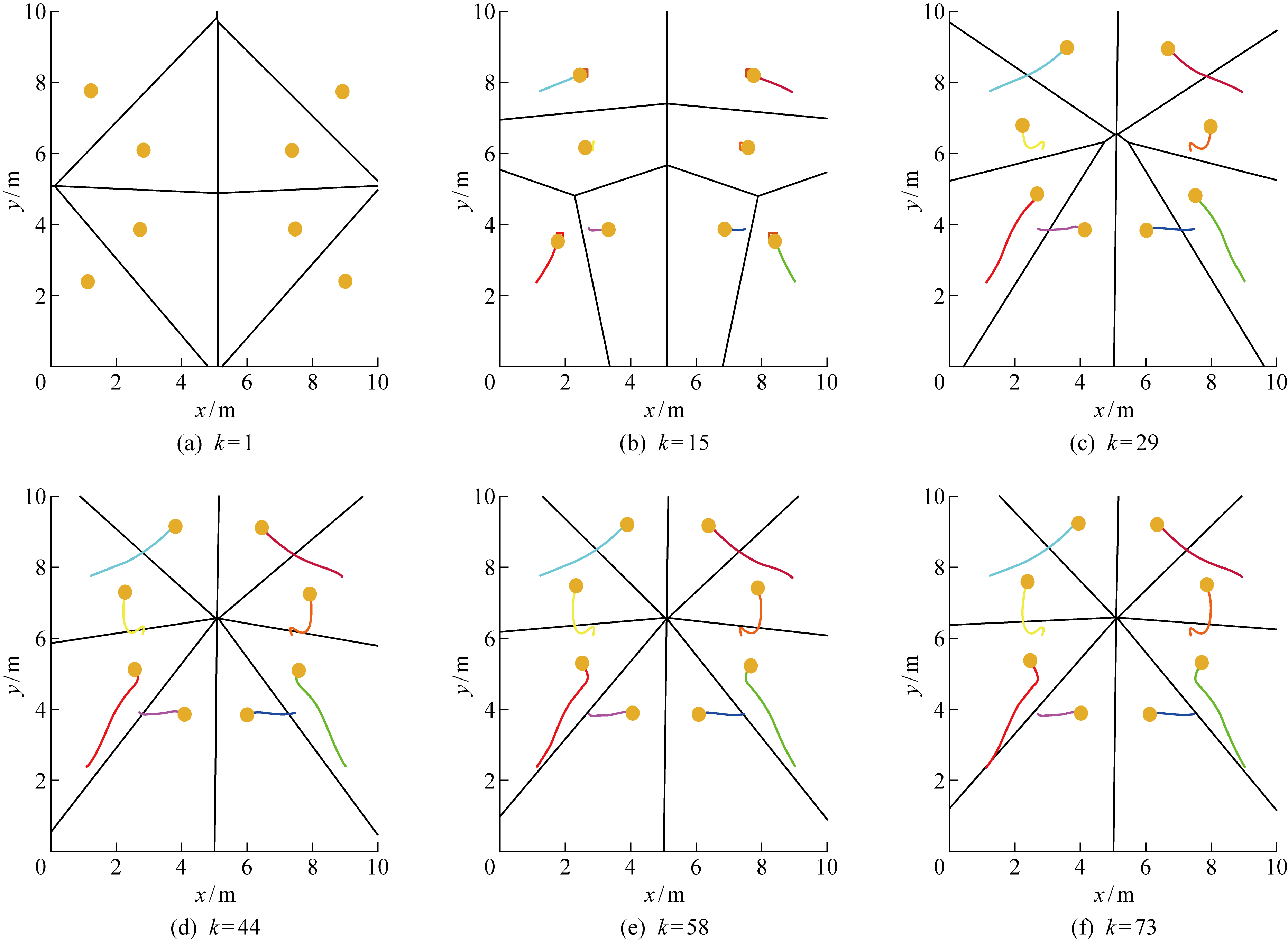
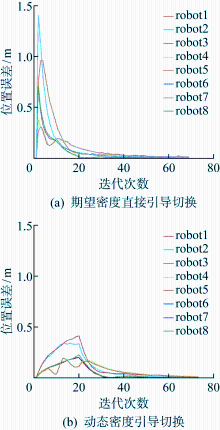
Fig.17
Position error of robot in formation merging process of Simulation 4
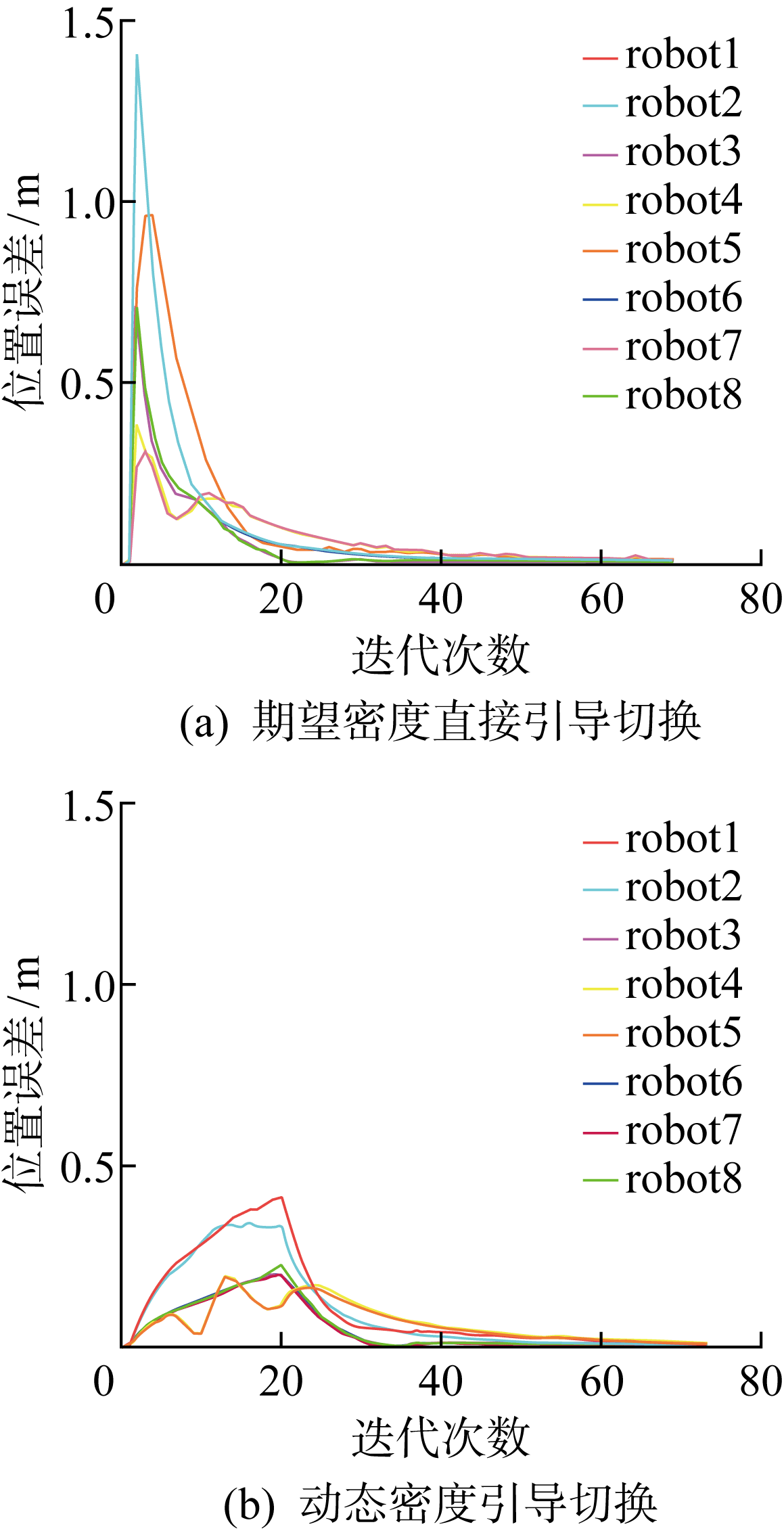
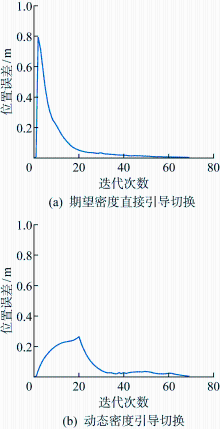
Fig.18
Robot cost function of formation merging process of Simulation 4
Tab.2
Average position error and iteration times of formation switching process
| 仿真 | 切换方式 | 编队平均位置误差 | 迭代次数 |
|---|---|---|---|
| 1 | 直接切换 | — | — |
| 本文方法 | 0.038 | 63 | |
| 2 | 直接切换 | 0.037 | 72 |
| 本文方法 | 0.035 | 69 | |
| 3 | 直接切换 | — | — |
| 本文方法 | 0.045 | 60 | |
| 4 | 直接切换 | 0.037 | 69 |
| 本文方法 | 0.035 | 73 |
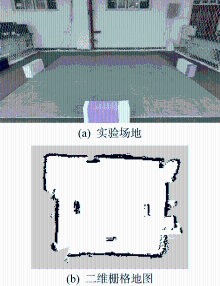
Fig.19
Experimental environment
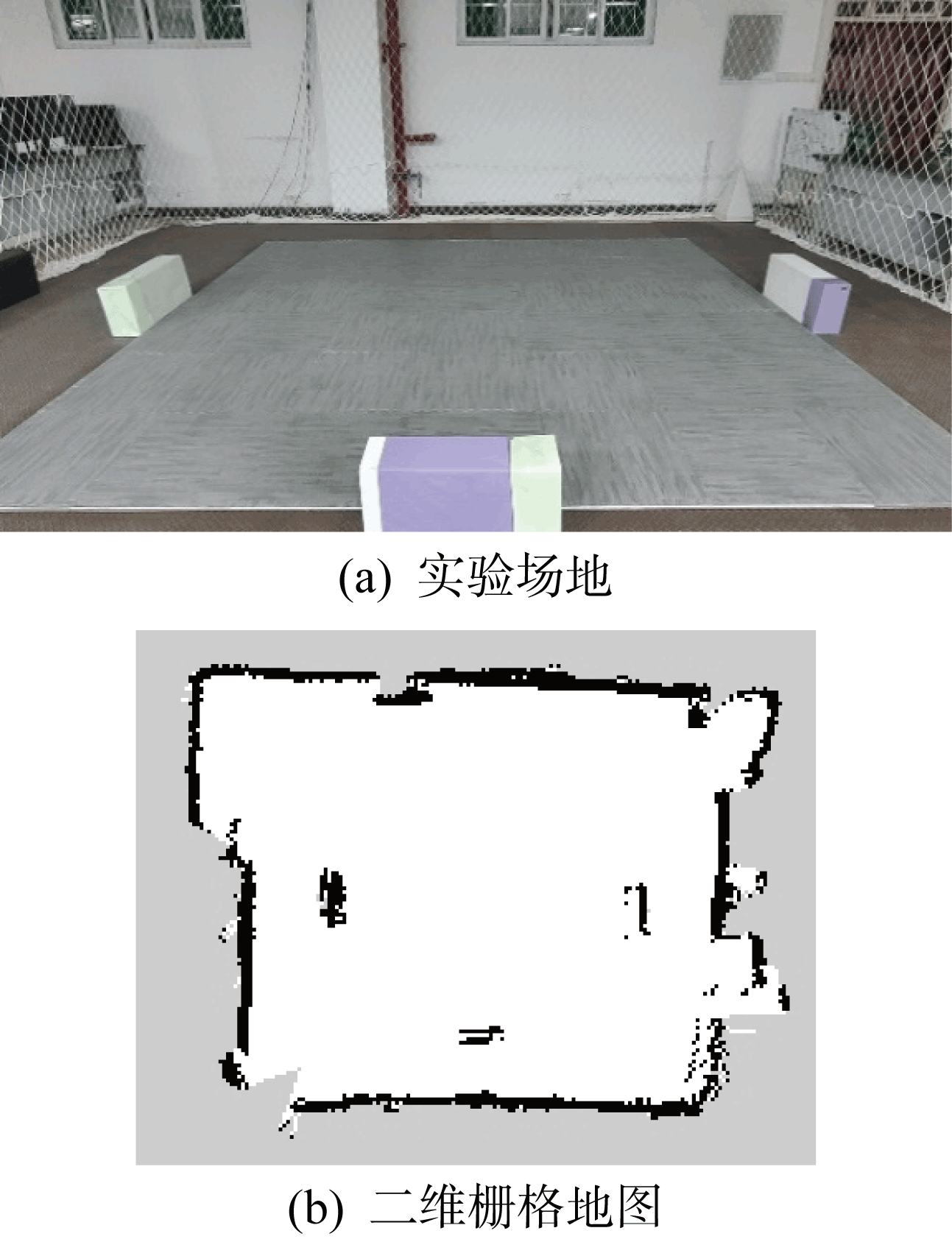
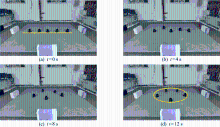
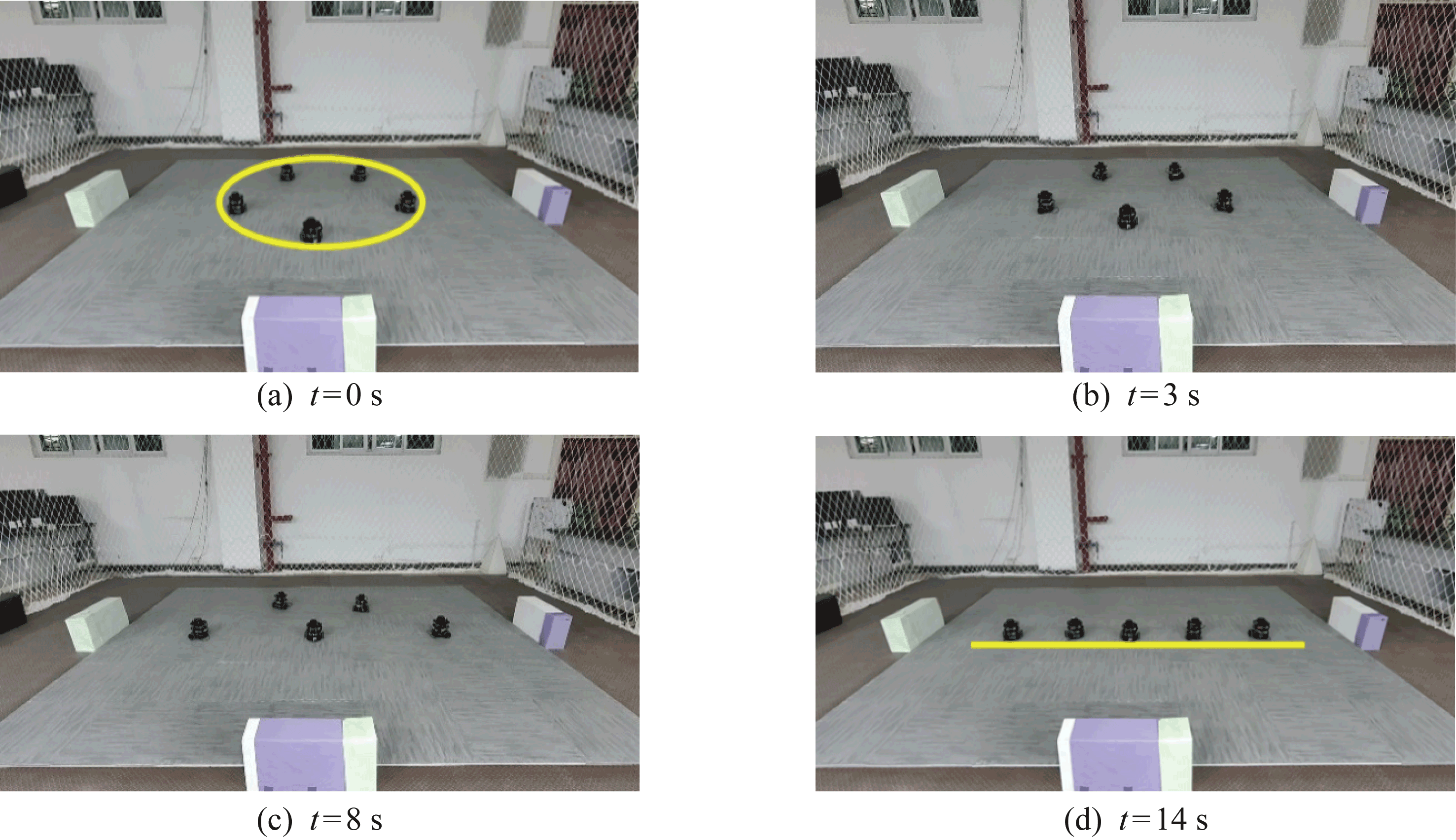
Fig.20
Switching from linear formation to circular formation
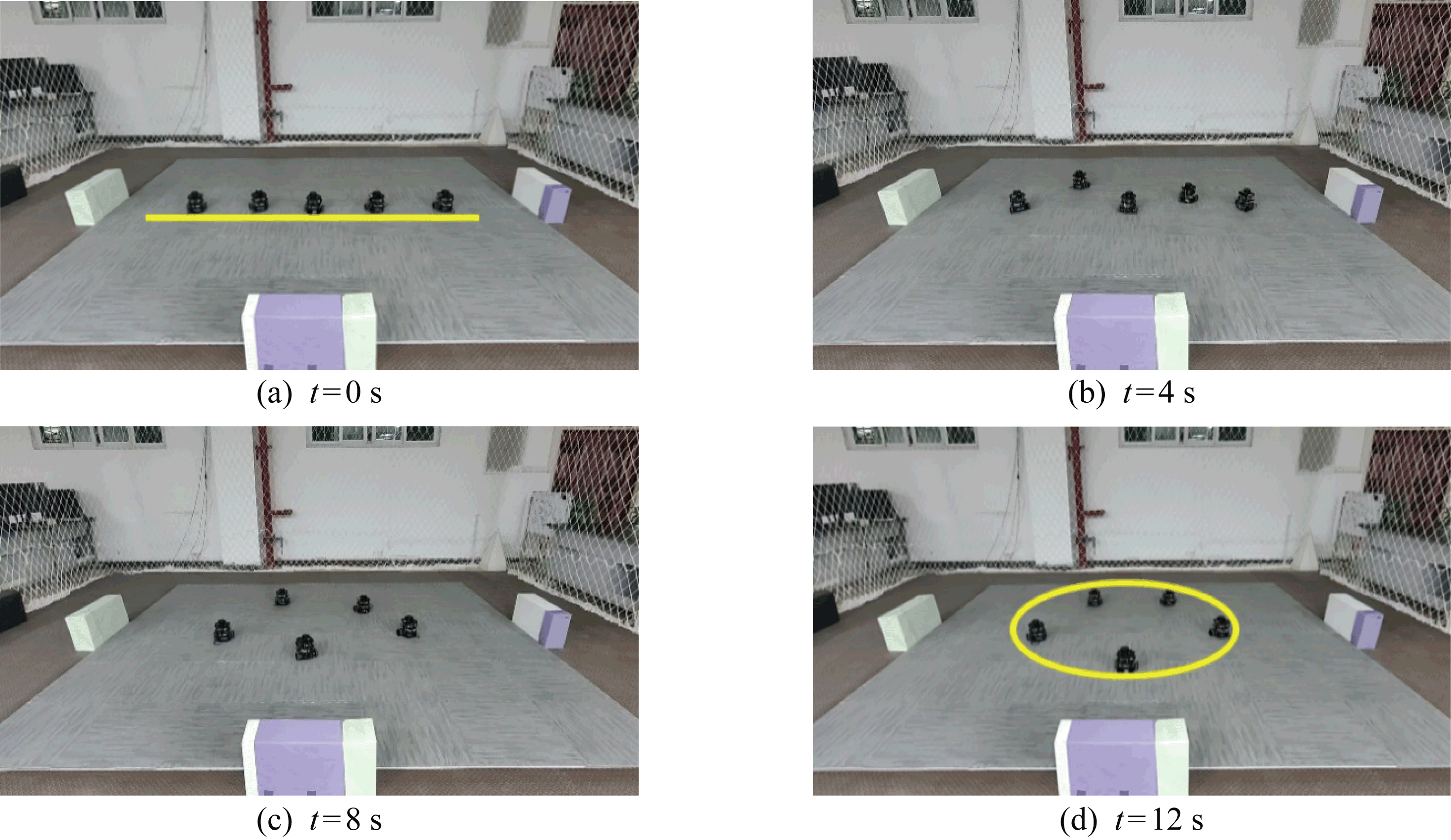
Fig.21
Switching from circular formation to linear formation
| [1] | GUO S, LIU B, ZHANG S, et al. Continuous-time gaussian process trajectory generation for multi-robot formation via probabilistic inference[C]//International Conference on Intelligent Robots and Systems. Prague, Czech Republic: IEEE, 2021: 9247-9253. |
| [2] | 王树凤, 张钧鑫, 张俊友. 基于人工势场和虚拟领航者的智能车辆编队控制[J]. 上海交通大学学报, 2020, 54(3): 305-311. |
| WANG Shufeng, ZHANG Junxin, ZHANG Junyou. Intelligent vehicles formation control based on artificial potential field and virtual leader[J]. Journal of Shanghai Jiao Tong University, 2020, 54(3): 305-311. | |
| [3] | HUANG J, ZHOU S, TU H, et al. Distributed optimization algorithm for multi-robot formation with virtual reference center[J]. Journal of Automatica Sinica, 2022, 9(4): 732-734. |
| [4] | FEOLA L, TRIANNI V. Adaptive strategies for team formation in minimalist robot swarms[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 4079-4085. |
| [5] | REZECK P, CHAIMOWICZ L. Chemistry-inspired pattern formation with robotic swarms[J]. IEEE Robotics and Automation Letters, 2022, 7(4): 9137-9144. |
| [6] | CORTES J, MARTINEZ S, KARATAS T, et al. Coverage control for mobile sensing networks[J]. IEEE Transactions on Robotics and Automation, 2004, 20(2): 243-255. |
| [7] | BREITENMOSER A, SCHWAGER M, METZGER J C, et al. Voronoi coverage of non-convex environments with a group of networked robots[C]//2010 IEEE International Conference on Robotics and Automation. Anchorage, AK, USA: IEEE, 2010: 4982-4989. |
| [8] | KANTAROS Y, THANOU M, TZES A. Distributed coverage control for concave areas by a heterogeneous robot-swarm with visibility sensing constraints[J]. Automatica, 2015, 53: 195-207. |
| [9] | ZHENG L, ZHAO J, CHENG Y, et al. Geometry-constrained crowd formation animation[J]. Computers & Graphics, 2014, 38: 268-276. |
| [10] |
TERUEL E, ARAGUES R, LÓPEZ-NICOLÁS G. A distributed robot swarm control for dynamic region coverage[J]. Robotics and Autonomous Systems, 2019, 119: 51-63.
doi: 10.1016/j.robot.2019.06.002 |
| [11] | 郑利平, 程亚军, 周乘龙, 等. 异构群体队形光滑变换控制方法[J]. 计算机辅助设计与图形学学报, 2015, 27(10): 1963-1970. |
| ZHENG Liping, CHENG Yajun, ZHOU Chenglong, et al. Research on smooth formation control of heterogeneous crowds[J]. Journal of Computer-Aided Design & Computer Graphics, 2015, 27(10): 1963-1970. | |
| [12] | ZHENG X, ZONG C, CHENG J, et al. Visually smooth multi-UAV formation transformation[J]. Graphical Models, 2021, 116: 101111. |
| [13] | BAI Y, WANG Y, XIONG X, et al. Adaptive multi-agent control with dynamic obstacle avoidance in a limited region[C]//American Control Conference. Atlanta, USA: IEEE, 2022: 4695-4700. |
| [14] | XU X, DIAZ-MERCADO Y. Multi-robot control using coverage over time-varying domains[C]//International Symposium on Multi-Robot and Multi-Agent Systems. New Brunswick, USA: IEEE, 2019: 179-181. |
| [15] | XU X, DIAZ-MERCADO Y. Multi-robot control using coverage over time-varying non-convex domains[C]//IEEE International Conference on Robotics and Automation. Paris, France: IEEE, 2020: 4536-4542. |
| [16] | GUO D, BAI Y, SVININ M, et al. Robust adaptive multi-agent coverage control for flood monitoring[C]//International Siberian Conference on Control and Communications. Kazan, Russia: IEEE, 2021: 1-5. |
| [17] | XU X, SHI G, TOKEKAR P, et al. Interactive multi-robot aerial cinematography through hemispherical manifold coverage[C]//International Conference on Intelligent Robots and Systems. Kyoto, Japan: IEEE, 2022: 11528-11534. |
| [18] | TERUEL E, ARAGUES R, LÓPEZ-NICOLÁS G. A practical method to cover evenly a dynamic region with a swarm[J]. IEEE Robotics and Automation Letters, 2021, 6(2): 1359-1366. |
| [19] | EISENBERGER M, NOVOTNY D, KERCHENBAUM G, et al. Neuromorph: Unsupervised shape interpolation and correspondence in one go[C]//Conference on Computer Vision and Pattern Recognition. Nashville, TN, USA: IEEE, 2021: 7473-7483. |
| [20] | PEYRÉ G, CUTURI M. Computational optimal transport: With applications to data science[J]. Foundations and Trends in Machine Learning, 2019, 11(5/6): 355-607. |
| [1] | SU Cheng, ZHAO Xiangtang, YAN Zengzhen, ZHAO Zhigang, MENG Jiadong. Load Stability Analysis of a Floating Multi-Robot Coordinated Towing System [J]. J Shanghai Jiaotong Univ Sci, 2025, 30(6): 1162-1170. |
| [2] | ZHAO Xiangtang, ZHAO Zhigang, WEI Qizhe, SU Cheng. Dynamic Analysis and Trajectory Solution of Multi-Robot Coordinated Towing System [J]. J Shanghai Jiaotong Univ Sci, 2025, 30(6): 1134-1143. |
| [3] | Li Tao, Zhao Zhigang, Zhu Mingtong, Zhao Xiangtang. Cable Vector Collision Detection Algorithm for Multi-Robot Collaborative Towing System [J]. J Shanghai Jiaotong Univ Sci, 2025, 30(2): 319-329. |
| [4] | MU Jianbin∗ (穆建彬), YANG Haili (杨海丽), HE Defeng (何德峰). CBF-Based Distributed Model Predictive Control for Safe Formation of Autonomous Mobile Robots [J]. J Shanghai Jiaotong Univ Sci, 2024, 29(4): 678-688. |
| [5] | JIAO Cong, XU Zhaosheng, LI Wei, TIAN Daogui, CHEN Lian, ZHAO Zheng. Aerial Induced Countermeasure Method Against Distributed Swarms [J]. Air & Space Defense, 2024, 7(4): 114-120. |
| [6] | MIAO Zhenhua(苗镇华), HUANG Wentao(黄文焘), ZHANG Yilian(张依恋), FAN Qinqin(范勤勤). Multi-Robot Task Allocation Using Multimodal Multi-Objective Evolutionary Algorithm Based on Deep Reinforcement Learning [J]. J Shanghai Jiaotong Univ Sci, 2024, 29(3): 377-387. |
| [7] | WANG Xianzhi, LI Guofei, CHANG Ya’nan. Distributed Extended State Observer-Based Formation Control of Multiple Flight Vehicles [J]. Journal of Shanghai Jiao Tong University, 2024, 58(11): 1798-1804. |
| [8] | LIU Yuming, ZHAO Yong, DONG Zhengjian, WANG Ping, JI Yuqi. Formation Control Strategy of Multiple Mobile Robots Cooperative Operation Based on Backstepping Method [J]. Journal of Shanghai Jiao Tong University, 2023, 57(1): 103-115. |
| [9] | LIU Chen, XIE Baodi, DONG Guobao, HUO Da, DUAN Yuxin, XIA Chuan. Controller Design of the UAV Formation Based on Adaptive Integral Sliding Mode [J]. Air & Space Defense, 2021, 4(1): 65-70. |
| [10] | WANG Shufeng,ZHANG Junxin,ZHANG Junyou. Intelligent Vehicles Formation Control Based on Artificial Potential Field and Virtual Leader [J]. Journal of Shanghai Jiaotong University, 2020, 54(3): 305-311. |
| [11] | SU Cheng,YE Jianan,LI Wei,DING Wangcai,ZHAO Zhigang. Analysis of Dynamic Workspace for Under-Constrained Coordinate Suspending System with Multi-Robots [J]. Journal of Shanghai Jiaotong University, 2019, 53(2): 225-231. |
| [12] | ZHAN Yongxiang1,LONG Xiaobo2,YAO Hailin1,ZHANG Jingbo3,CHEN Yu4. The Control of Resilient Modulus of Soft Rock as Filling Material for#br# Subgrade Based on Dynamic Deformation Control Method [J]. Journal of Shanghai Jiao Tong University, 2017, 51(4): 450-. |
| [13] | ZHAO Zhigang1,TENG Fujun1,SHI Guangtian1,LI Jinsong2,JI Gang2. Analysis and Calculation of Feasible Region of Multi-Robot Combined Lifting System [J]. Journal of Shanghai Jiaotong University, 2015, 49(08): 1174-1180. |
| [14] | DUAN Wei-Dang-1, YUAN Cheng-Hai-2, ZHENG Wen-Bo-3, SHI Zhan-4, CAI Yong-Chang-3. Optimal Analysis of Construction Schemes for Urban Shallow-Buried Multi-arch Tunnel by Single-Tunnel Method [J]. Journal of Shanghai Jiaotong University, 2012, 46(01): 99-104. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||