Journal of Shanghai Jiao Tong University ›› 2022, Vol. 56 ›› Issue (11): 1427-1437.doi: 10.16183/j.cnki.jsjtu.2022.190
• Guidance, Navigation and Control • Next Articles
YANG Shu1, QIAN Yunxiao1, YANG Ting1,2( )
)
Received:2022-06-01
Online:2022-11-28
Published:2022-12-02
Contact:
YANG Ting
E-mail:yangtingszc@163.com
CLC Number:
YANG Shu, QIAN Yunxiao, YANG Ting. Linear Parameter-Varying Integrated Control Law Design for a Hypersonic Vehicle[J]. Journal of Shanghai Jiao Tong University, 2022, 56(11): 1427-1437.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2022.190
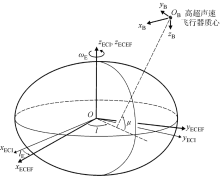
Fig.1
ECEF reference frame and body reference frame
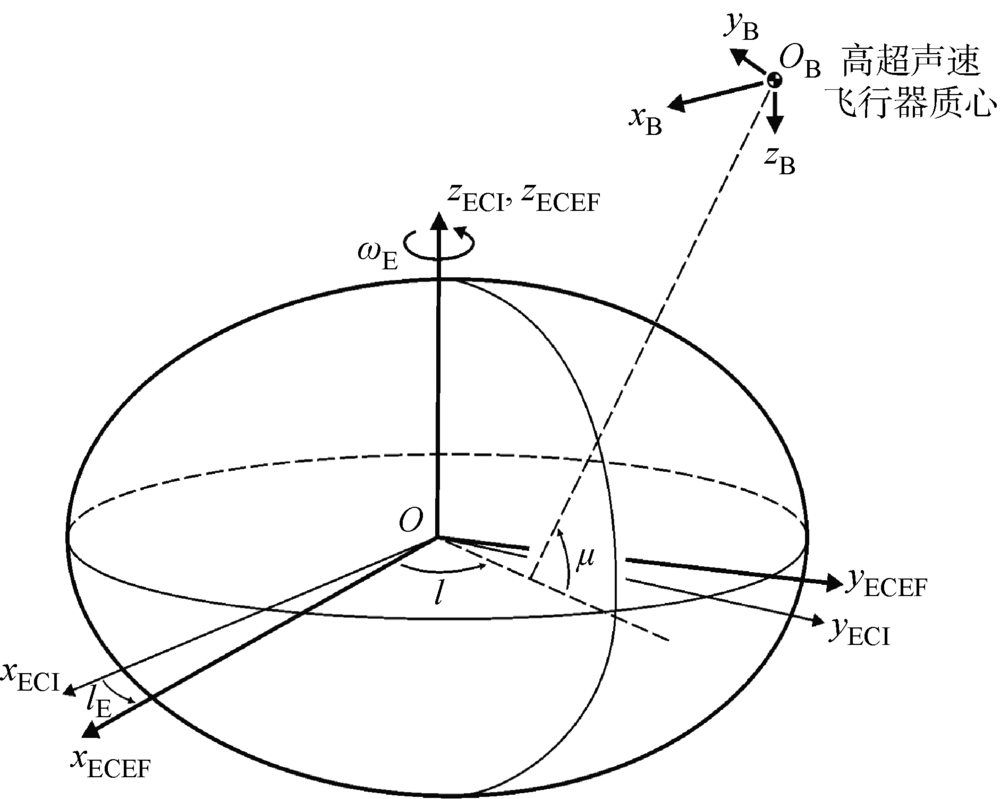
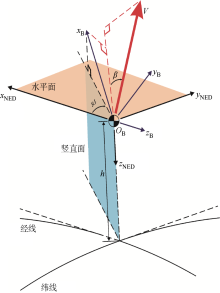
Fig.2
Altitude-horizontal trajectory control concept
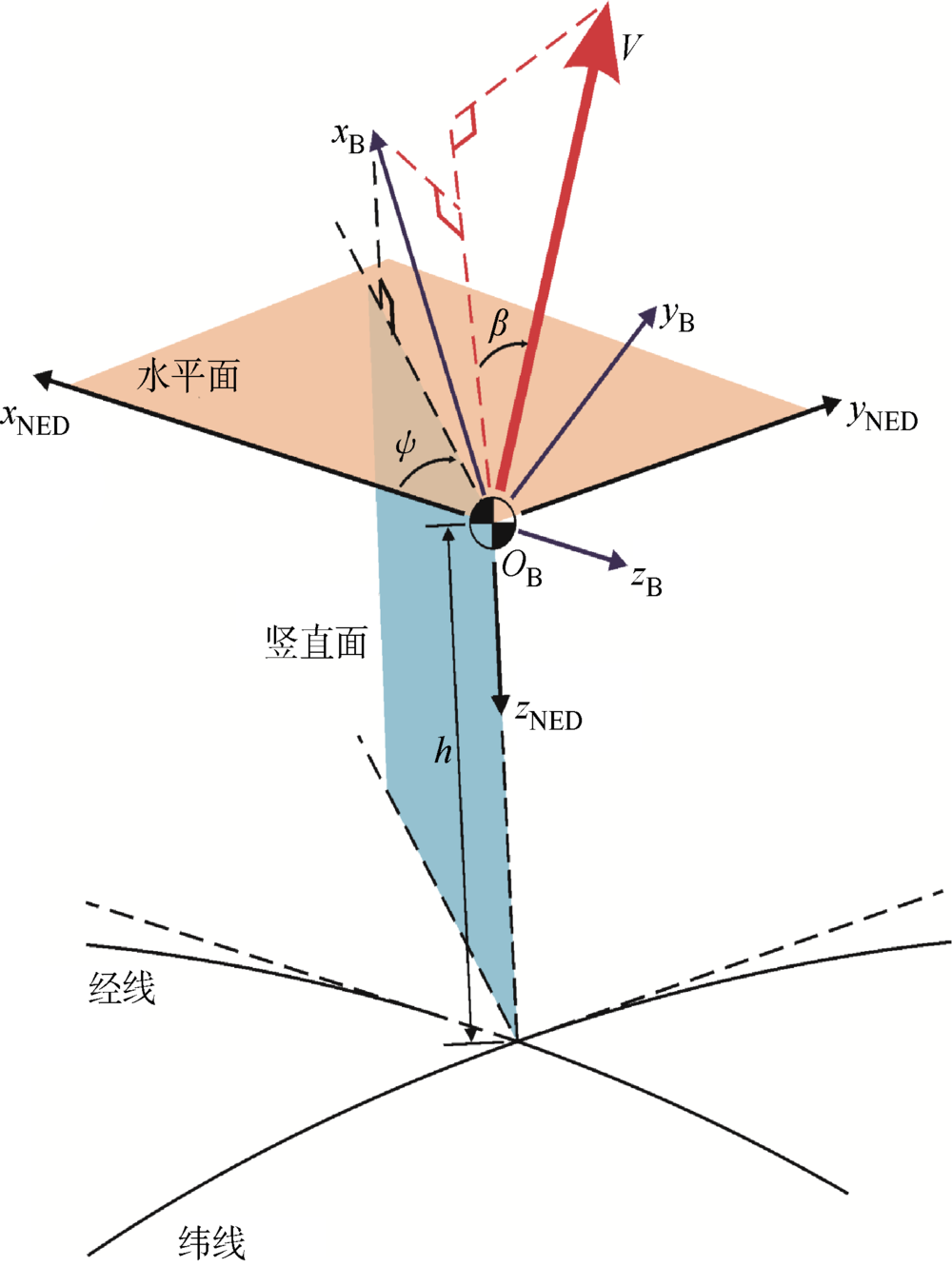
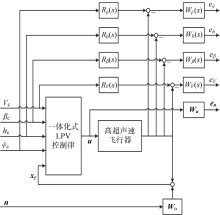
Fig.3
System interconnections for LPV control law
Fig.4
Open-loop and closed-loop poles of a hypersonic vehicle
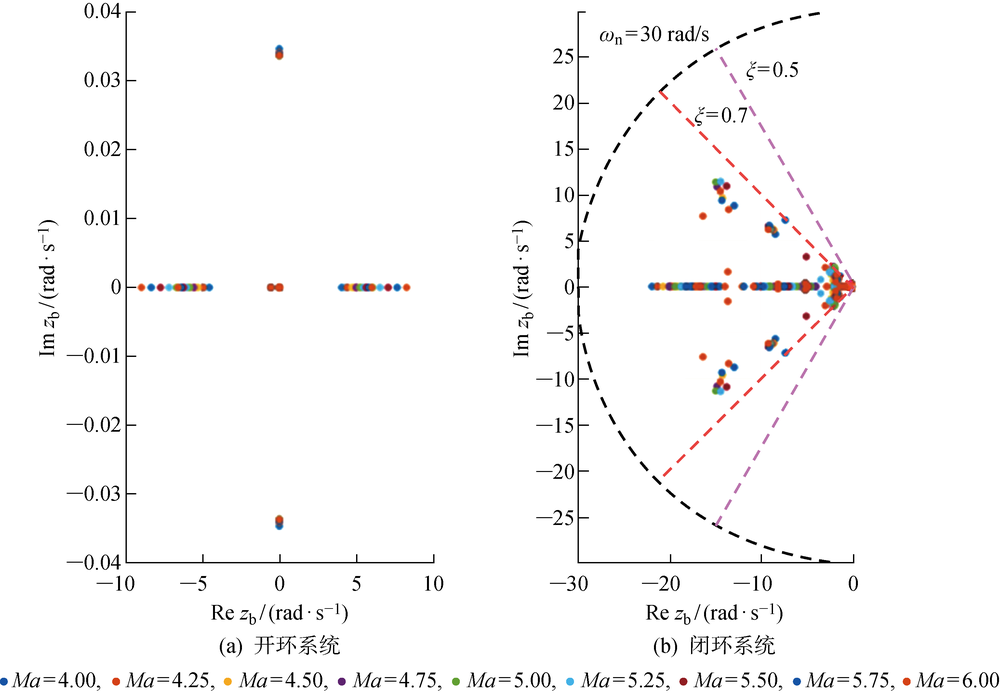

Fig.5
Control commands and system responses (ascent-acceleration maneuver)
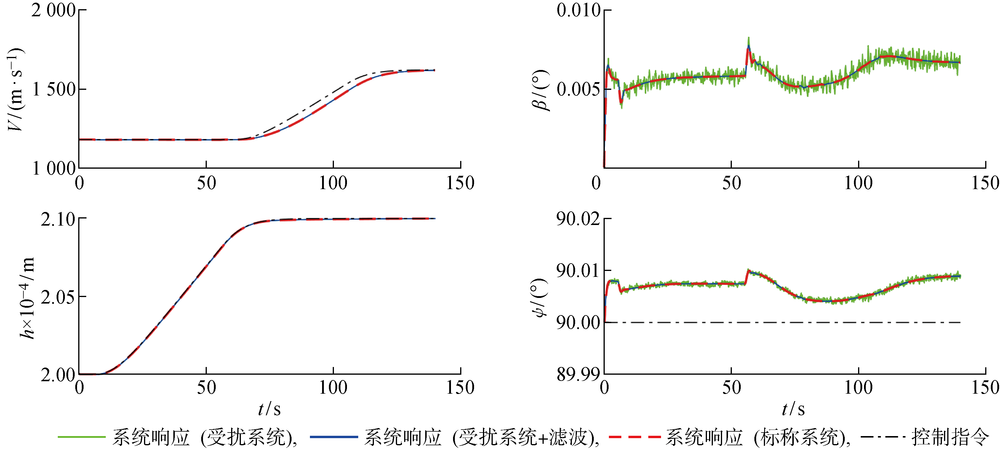

Fig.6
State responses of hypersonic vehicle equations of motion in ECEF reference frame (ascent-acceleration maneuver)
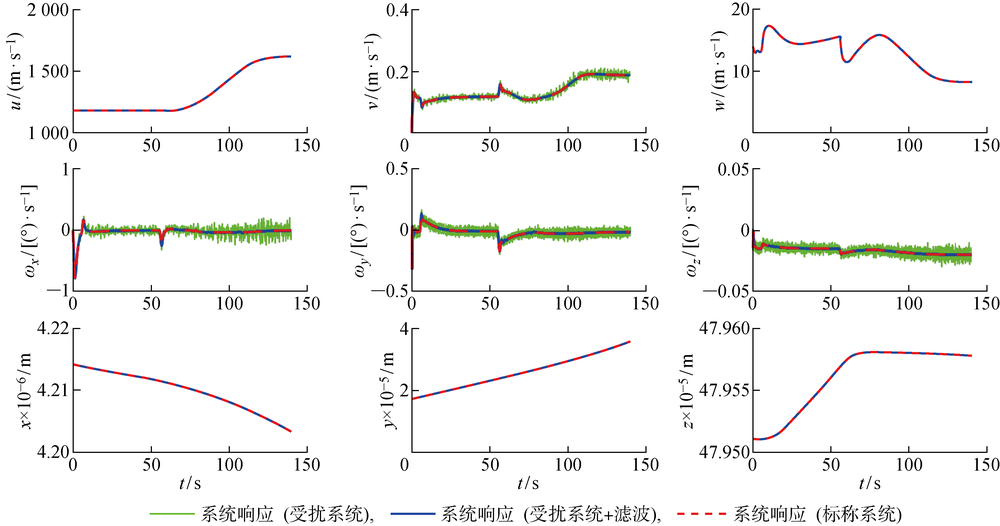
Fig.7
Quaternion responses of hypersonic vehicle equations of motion in ECEF reference frame (ascent-acceleration maneuver)
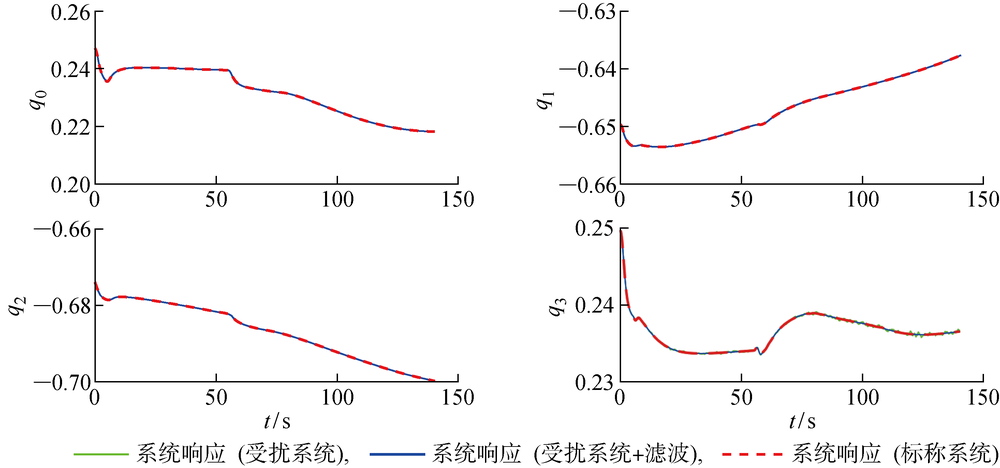

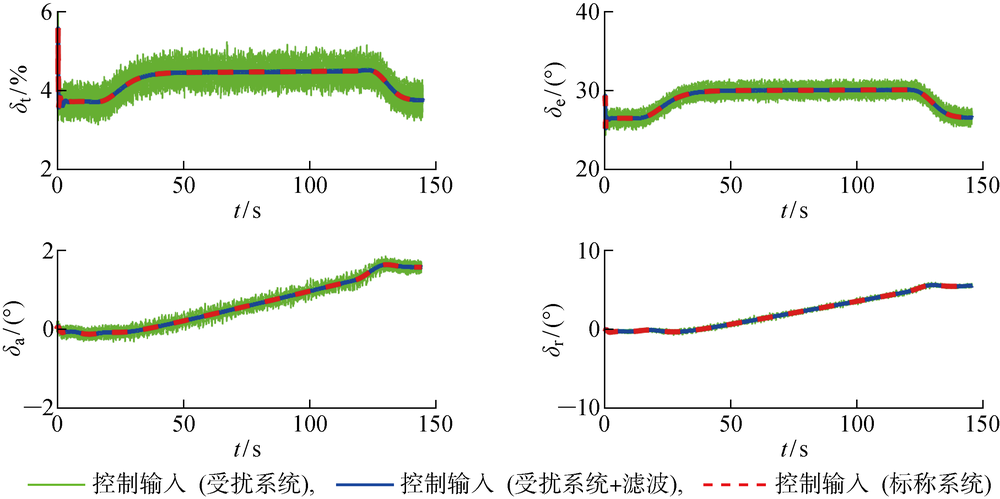
Fig.8
Control inputs (ascent-acceleration maneuver)
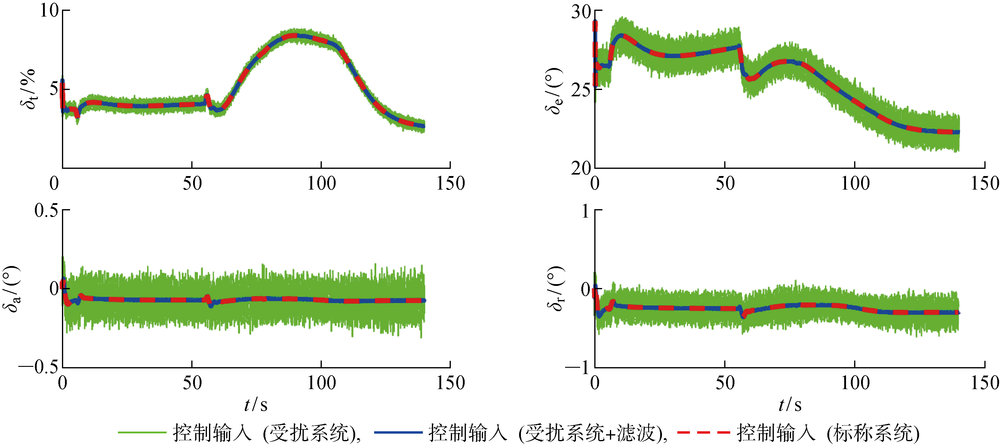

Fig.9
Control commands and system responses (level turn maneuver)
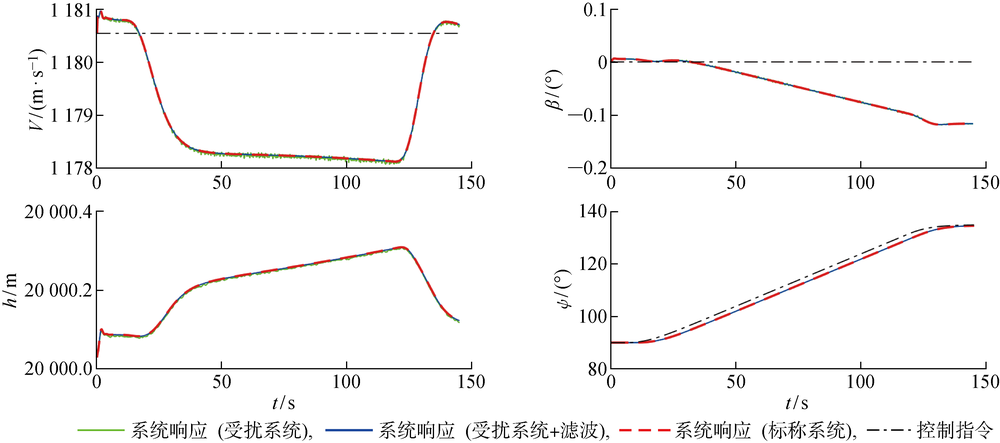
Fig.10
State responses of hypersonic vehicle equations of motion in ECEF reference frame (level turn maneuver)
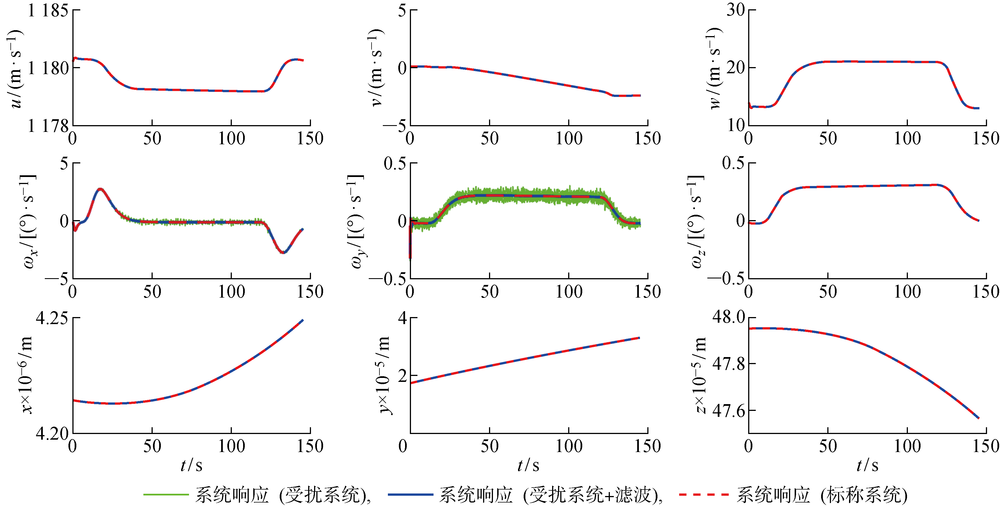
Fig.11
Quaternion responses of hypersonic vehicle equations of motion in ECEF reference frame (level turn maneuver)


Fig.12
Control inputs (level turn maneuver)
| [1] | 刘晓东, 黄万伟, 王丹晔, 等. 带终端角度约束的飞行器三维制导控制一体化设计[J]. 航天控制, 2016, 34(2): 3-8. |
| LIU Xiaodong, HUANG Wanwei, WANG Danye, et al. Aircraft three-dimensional integrated guidance and control design containing terminal angle constraints[J]. Aerospace Control, 2016, 34(2): 3-8. | |
| [2] | 路遥, 贾志强, 刘晓东, 等. 高超声速飞行器无在线求导backstepping 控制方法[J]. 宇航学报, 2022, 43(1): 103-110. |
| LU Yao, JIA Zhiqiang, LIU Xiaodong, et al. Backstepping control for hypersonic vehicles without online differentiation[J]. Journal of Astronautics, 2022, 43(1): 103-110. | |
| [3] | 秦伟伟, 郑志强, 刘刚, 等. 高超声速飞行器的LPV鲁棒变增益控制[J]. 系统工程与电子技术, 2011, 33(6): 1327-1331. |
| QIN Weiwei, ZHENG Zhiqiang, LIU Gang, et al. Robust variable gain control for hypersonic vehicles based on LPV[J]. Systems Engineering and Electronics, 2011, 33(6): 1327-1331. | |
| [4] | 张健松, 马清华, 黎海青, 等. 高超声速飞行器鲁棒纵向控制技术研究[J]. 弹箭与制导学报, 2020, 40(2): 19-22. |
| ZHANG Jiansong, MA Qinghua, LI Haiqing, et al. Robust longitudinal control method for hypersonic vehicle[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2020, 40(2): 19-22. | |
| [5] |
BU X W, QI Q. Fuzzy optimal tracking control of hypersonic flight vehicles via single-network adaptive critic design[J]. IEEE Transactions on Fuzzy Systems, 2022, 30(1): 270-278.
doi: 10.1109/TFUZZ.2020.3036706 URL |
| [6] | 唐博, 席建祥, 刘太阳, 等. 俯冲段高超声速飞行器有限时间协同制导律设计[J]. 北京航空航天大学学报, 2021, 47(10): 2105-2117. |
| TANG Bo, XI Jianxiang, LIU Taiyang, et al. Design of finite-time cooperative guidance law for hypersonic vehicles in dive phase[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(10): 2105-2117. | |
| [7] |
WANG J H, CHENG L, CAI Y W, et al. Low-order diving integrated guidance and control for hypersonic vehicles[J]. Aerospace Science and Technology, 2019, 91: 96-109.
doi: 10.1016/j.ast.2019.04.045 URL |
| [8] | BAO C Y, WANG P, TANG G J. Integrated guidance and control for hypersonic morphing missile based on variable span auxiliary control[J]. International Journal of Aerospace Engineering, 2019, 2019: 6413410. |
| [9] |
蔡光斌, 赵阳, 张胜修, 等. 高超声速飞行器鲁棒多目标线性变参数控制[J]. 兵工学报, 2019, 40(11): 2229-2240.
doi: 10.3969/j.issn.1000-1093.2019.11.007 |
|
CAI Guangbin, ZHAO Yang, ZHANG Shengxiu, et al. Robust multi-objective linear parameter-varying control for hypersonic vehicle[J]. Acta Armamentarii, 2019, 40(11): 2229-2240.
doi: 10.3969/j.issn.1000-1093.2019.11.007 |
|
| [10] | 黄宜庆, 江岩, 李志琨, 等. 高超声速飞行器的增益调度切换控制[J]. 控制工程, 2019, 26(3): 405-411. |
| HUANG Yiqing, JIANG Yan, LI Zhikun, et al. Output feedback gain-scheduled switching control for hypersonic vehicles[J]. Control Engineering of China, 2019, 26(3): 405-411. | |
| [11] | 郑亚龙, 江驹, 徐文萤. 基于最优选点数的多胞LPV建模及其鲁棒控制研究[J]. 舰船电子工程, 2019, 39(11): 56-60. |
| ZHENG Yalong, JIANG Ju, XU Wenying. Uncertain polytopic LPV modelling based on the number of optimal equilibrium points and robust control[J]. Ship Electronic Engineering, 2019, 39(11): 56-60. | |
| [12] | 黄显林, 葛东明. 吸气式高超声速飞行器纵向机动飞行的鲁棒线性变参数控制[J]. 宇航学报, 2010, 31(7): 1789-1797. |
| HUANG Xianlin, GE Dongming. Robust linear parameter-varying control for longitudinal maneuvering flight of air-breathing hypersonic vehicle[J]. Journal of Astronautics, 2010, 31(7): 1789-1797. | |
| [13] | STEVENS B L, LEWIS F L, JOHNSON E N. Aircraft control and simulation[M]. 3rd ed. Hoboken, USA: John Wiley & Sons, Inc, 2015. |
| [14] | SHAUGHNESSY J D, PINCKNEY S Z, MCMINN J D, et al. Hypersonic vehicle simulation model: Winged-cone configuration[R]. USA: NASA, 1990. |
| [15] | GREENWOOD D T. Advanced dynamics[M]. New York, USA: Cambridge University Press, 2003. |
| [16] |
MARCOS A, BALAS G J. Development of linear-parameter-varying models for aircraft[J]. Journal of Guidance, Control, and Dynamics, 2004, 27(2): 218-228.
doi: 10.2514/1.9165 URL |
| [17] | DULLERUD G E. PAGANINI F G. A course in robust control theory: A convex approach[M]. New York, USA: Springer, 2000. |
| [18] |
APKARIAN P, ADAMS R J. Advanced gain-scheduling techniques for uncertain systems[J]. IEEE Transactions on Control Systems Technology, 1998, 6(1): 21-32.
doi: 10.1109/87.654874 URL |
| [19] |
CHILALI M, GAHINET P. H∞ design with pole placement constraints: An LMI approach[J]. IEEE Transactions on Automatic Control, 1996, 41(3): 358-367.
doi: 10.1109/9.486637 URL |
| [1] | LIU Shuangxi, WANG Yichong, ZHU Mengjie, LI Yong, YAN Binbin. Research on Differential Game Guidance Law for Intercepting Hypersonic Vehicles with Small Missile-to-Target Speed Ratio [J]. Air & Space Defense, 2022, 5(2): 49-57. |
| [2] | TIAN Ruocen, ZHANG Qingzhen, GUO Yunhe, CHENG Lin. Design of Reentry Guidance Law of Hypersonic Vehicle Based on No-Fly Zone Avoidance [J]. Air & Space Defense, 2022, 5(2): 65-74. |
| [3] | XIONG Junhui, LI Keyong, LIU Yi, JI Yu. Study on Near Space Defense Technology Development and Penetration Strategy [J]. Air & Space Defense, 2021, 4(2): 82-. |
| [4] | WANG Haoning, TANG Shengjing, GUO Jie, HUANG Fan. Time-Constrained Reentry Guidance with Dynamic Angle of Attack Profile [J]. Air & Space Defense, 2021, 4(1): 71-76. |
| [5] | DAI Cong, LIU Yongzhi, SUN Haoshui . Fault Reconstruction for Lipschitz Nonlinear Systems Using Higher Terminal Sliding Mode Observer [J]. Journal of Shanghai Jiao Tong University(Science), 2020, 25(5): 630-638. |
| [6] | LIU Haodong, ZHANG Qingzhen, GUO Yunhe, MAO Jiawen. Online Identification of Morphing Aircraft Model Parameters Based on Recursive Least Square Method [J]. Air & Space Defense, 2020, 3(3): 103-110. |
| [7] | MA Yongquan,QIU Hongxing. A Novel Strategy for Controlling Wind-Induced Vibration of Large Span Transmission TowerLine System [J]. Journal of Shanghai Jiaotong University, 2014, 48(12): 1751-1759. |
| [8] | ZHAN Shitao1,YAN Weixin1,FU Zhuang1,2,PAN Gen1,YU Jinjiang3,ZHAO Yanzheng1. Feedback Stabilization of a Two-axis Gimbal System via Convex Optimization [J]. Journal of Shanghai Jiaotong University, 2013, 47(08): 1312-1318. |
| [9] | DONG Xue-Ping, SU Yu-Tian. Satisfactory Control for a Class of Uncertain Switched Linear Systems [J]. Journal of Shanghai Jiaotong University, 2011, 45(08): 1196-1201. |
| [10] | HUANG Yi-Qing, WANG Li, SUN Chang-Yin. Non-fragile Optimal H2/LQR Control with Regional Pole Placement for Hypersonic Vehicle [J]. Journal of Shanghai Jiaotong University, 2011, 45(03): 423-428. |
| [11] |
SUN Yong,DUAN Guangren,ZHANG Maorui,ZHANG Ze . Reentry Trajectory Optimization of Hypersonic Vehicle Based on Pseudo Energy [J]. Journal of Shanghai Jiaotong University, 2011, 45(02): 262-0266. |
| [12] |
QU Xin,REN Zhang,SONG Jianshuang,WANG Junbo . Modeling and Disturbance Observer Based Control for a Hypersonic Vehicle [J]. Journal of Shanghai Jiaotong University, 2011, 45(02): 272-0276. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||