Journal of Shanghai Jiao Tong University ›› 2023, Vol. 57 ›› Issue (S1): 114-123.doi: 10.16183/j.cnki.jsjtu.2023.S1.25
Previous Articles Next Articles
YU Te1,2, LIU Jiapeng1,2, WU Chao3( ), ZHOU Chang1,2, ZHOU Shengzeng1,2, WANG Lei3
), ZHOU Chang1,2, ZHOU Shengzeng1,2, WANG Lei3
Received:2023-05-14
Revised:2023-06-14
Accepted:2023-07-18
Online:2023-10-28
Published:2023-11-10
Contact:
WU Chao
E-mail:wuchaorr@sjtu.edu.cn.
CLC Number:
YU Te, LIU Jiapeng, WU Chao, ZHOU Chang, ZHOU Shengzeng, WANG Lei. USV and AUV Cooperative Control Strategy Based on Nonlinear Disturbance Observer[J]. Journal of Shanghai Jiao Tong University, 2023, 57(S1): 114-123.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2023.S1.25
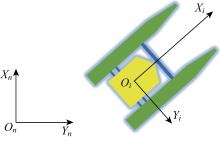
Fig.1
Coordinate system of USV
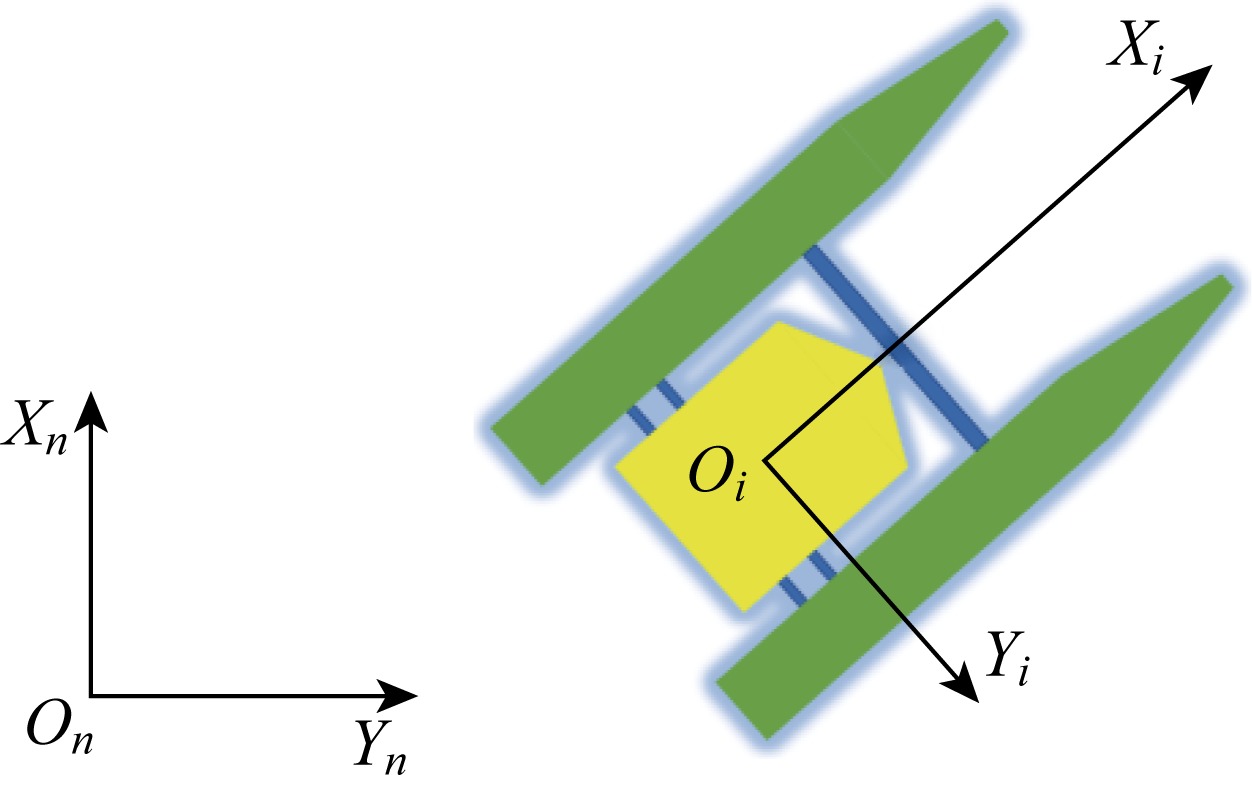
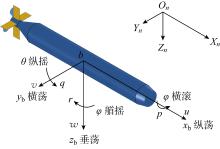
Fig.2
Coordinate system of AUV
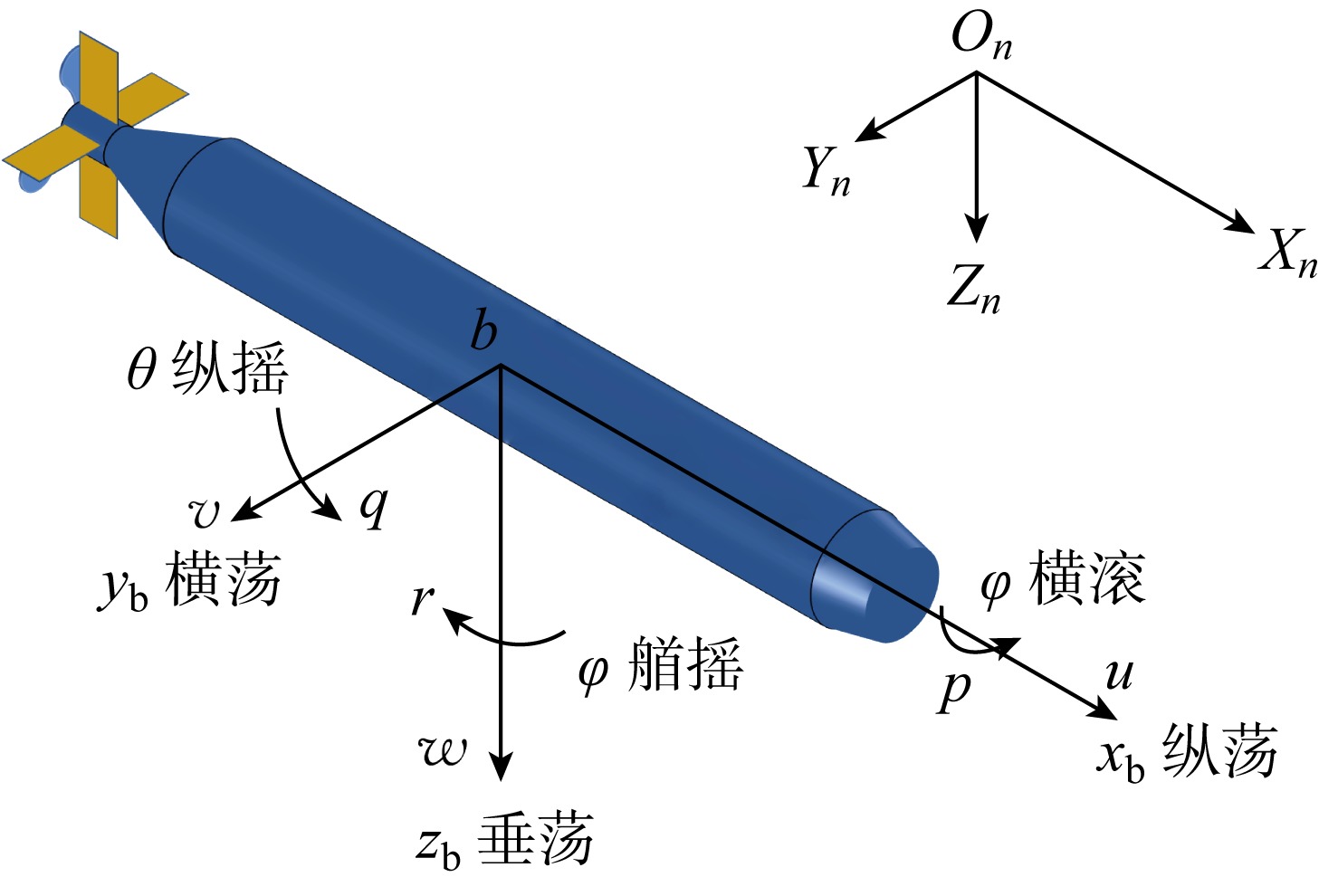
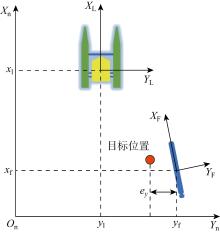
Fig.3
Formation structure of USV-AUV
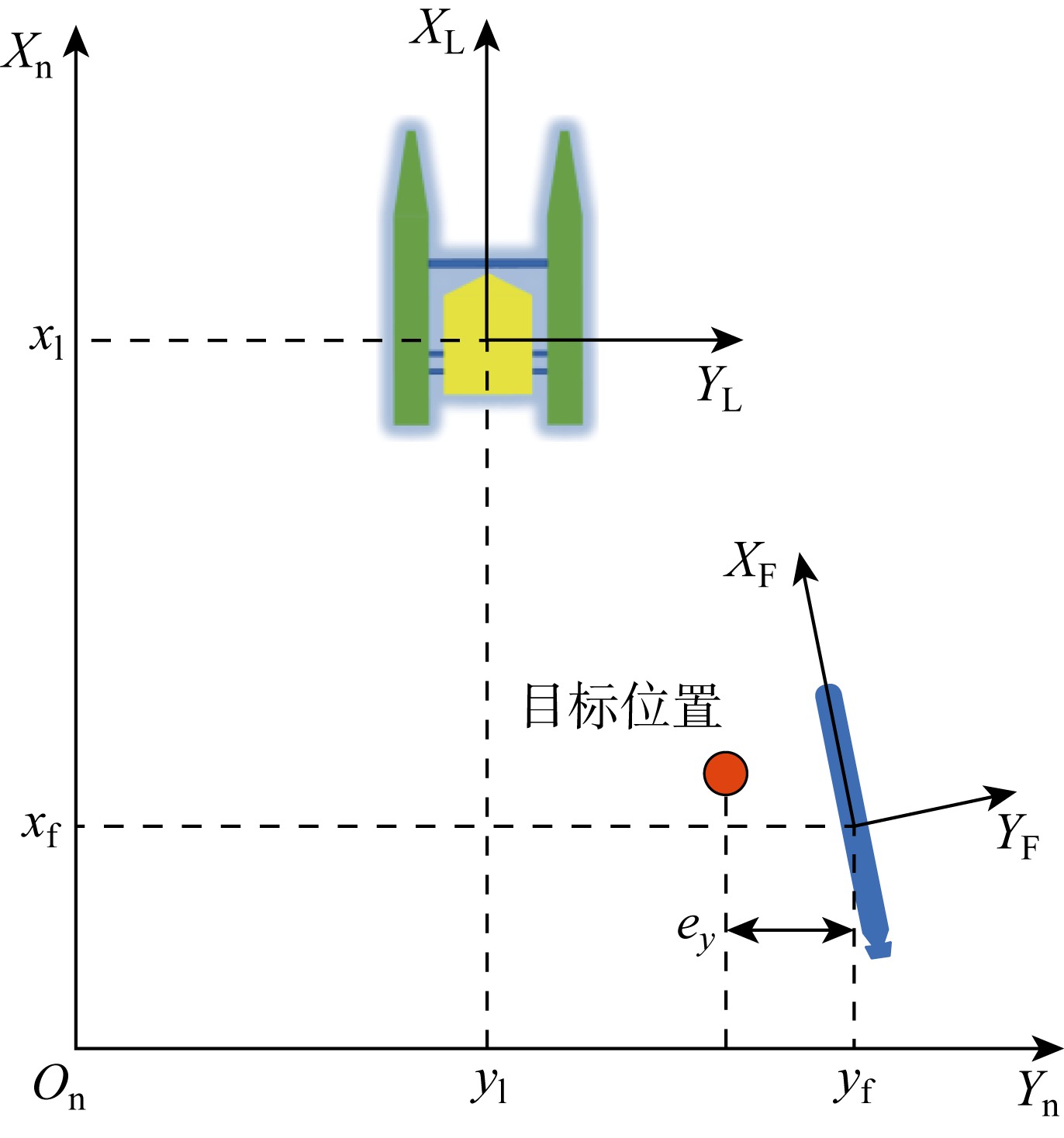

Fig.4
USV in lake test


Fig.5
AUV in lake test

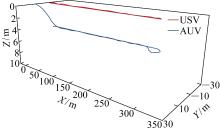
Fig.6
Trajectory of USV-AUV formation

Fig.7
Formation tracking error of AUV

| [12] |
QI X. Adaptive coordinated tracking control of multiple autonomous underwater vehicles[J]. Ocean Engineering, 2014, 91: 84-90.
doi: 10.1016/j.oceaneng.2014.08.019 URL |
| [13] |
YAN X, JIANG D, MIAO R, et al. Formation control and obstacle avoidance algorithm of a multi-USV system based on virtual structure and artificial potential field[J]. Journal of Marine Science and Engineering, 2021, 9(2): 161-178.
doi: 10.3390/jmse9020161 URL |
| [14] |
PARK B S, YOO S J. Connectivity-maintaining and collision-avoiding performance function approach for robust leader-follower formation control of multiple uncertain underactuated surface vessels[J]. Automatica, 2021, 127: 109501.
doi: 10.1016/j.automatica.2021.109501 URL |
| [15] | EDWARDS D B, BEAN T A, ODELL D L, et al. A leader-follower algorithm for multiple AUV formations[C]// 2004 IEEE/OES Autonomous Underwater Vehicles (IEEE Cat. No. 04CH37578). Sebasco, ME, USA: IEEE, 2004: 40-46. |
| [16] | ROUT R, SUBUDHI B. A backstepping approach for the formation control of multiple autonomous underwater vehicles using a leader-follower strategy[J]. Journal of Marine Engineering & Technology, 2016, 15(1): 38-46. |
| [17] |
CUI R, GE S S, HOW B V E, et al. Leader-follower formation control of underactuated autonomous underwater vehicles[J]. Ocean Engineering, 2010, 37(17-18): 1491-1502.
doi: 10.1016/j.oceaneng.2010.07.006 URL |
| [18] | 庞师坤, 王健, 易宏, 等. 基于传感探测系统的多自治水下机器人编队协调控制[J]. 上海交通大学学报, 2019, 53(5): 549-555. |
| PANG Shikun, WANG Jian, YI Hong, et al. Formation control of multiple autonomous underwater vehicles based on sensor measuring system[J]. Journal of Shanghai Jiao Tong University, 2019, 53(5): 549-555. | |
| [19] | ZHUANG Y, HAN X, HUANG H, et al. Dynamic area coverage with multi-USV in fully connected state using graph theory[C]// 2021 China Automation Congress (CAC). Beijing, China: IEEE, 2021: 7376-7382. |
| [20] | VANNI F, AGUIAR A P, PASCOAL A. Nonlinear motion control of multiple autonomous underwater vehicles[J]. IFAC Proceedings Volumes, 2007, 40(17): 75-80. |
| [21] |
SHOJAEI K. Leader-follower formation control of underactuated autonomous marine surface vehicles with limited torque[J]. Ocean Engineering, 2015, 105: 196-205.
doi: 10.1016/j.oceaneng.2015.06.026 URL |
| [22] | SOARES J M, AGUIAR A P, PASCOAL A M, et al. Joint ASV/AUV range-based formation control: Theory and experimental results[C]// 2013 IEEE International Conference on Robotics and Automation. Karlsruhe, Germany: IEEE, 2013: 5579-5585. |
| [23] | 李娟, 袁锐锟, 张宏瀚. 基于领航跟随法的多 AUV 编队控制算法研究[J]. 仪器仪表学报, 2022, 40(6): 237-246. |
| LI Juan, YUAN Ruikun, ZHANG Honghan. Research on multiple AUVs formation control algorithm based on leader-follower method[J]. Chinese Journal of Scientific Instrument, 2022, 40(6): 237-246. | |
| [24] | 徐博, 王朝阳. 基于无人艇跨域异构编队协同导航研究进展与未来趋势[J]. 中国舰船研究, 2022, 17(4): 1-11. |
| XU Bo, WANG Zhaoyang. Cooperative navigation of cross-domain heterogeneous unmanned ship formation: recent advances and future trends[J]. Chinese Journal of Ship Research, 2022, 17(4): 1-11. | |
| [25] | MCGILLIVARY P, DE SOUSA J B, MARTINS R, et al. Integrating autonomous underwater vessels, surface vessels and aircraft as persistent surveillance components of ocean observing studies[C]// 2012 IEEE/OES Autonomous Underwater Vehicles (AUV). Southampton, UK: IEEE, 2012: 1-5. |
| [26] | NORGREN P, LUDVIGSEN M, INGEBRETSEN T, et al. Tracking and remote monitoring of an autonomous underwater vehicle using an unmanned surface vehicle in the Trondheim Fjord[C]// OCEANS 2015-MTS/IEEE Washington. Washington D.C., USA: IEEE, 2015: 1-6. |
| [27] |
JIA Z, LU H, LI S, et al. Distributed dynamic rendezvous control of the AUV-USV joint system with practical disturbance compensations using model predictive control[J]. Ocean Engineering, 2022, 258: 111268.
doi: 10.1016/j.oceaneng.2022.111268 URL |
| [28] |
SARDA E I, DHANAK M R. Launch and recovery of an autonomous underwater vehicle from a station-keeping unmanned surface vehicle[J]. IEEE Journal of Oceanic Engineering, 2018, 44(2): 290-299.
doi: 10.1109/JOE.48 URL |
| [29] |
LI J, ZHANG G, LI B. Robust adaptive neural cooperative control for the USV-UAV based on the LVS-LVA guidance principle[J]. Journal of Marine Science and Engineering, 2022, 10(1): 51-70.
doi: 10.3390/jmse10010051 URL |
| [30] |
CHO H, JEONG S K, JI D H, et al. Study on control system of integrated unmanned surface vehicle and underwater vehicle[J]. Sensors, 2020, 20(9): 2633-2655.
doi: 10.3390/s20092633 URL |
| [31] |
PANTELEY E, LORIA A. On global uniform asymptotic stability of nonlinear time-varying systems in cascade[J]. Systems & Control Letters, 1998, 33(2): 131-138.
doi: 10.1016/S0167-6911(97)00119-9 URL |
| [32] | FOSSEN T I. Handbook of marine craft hydrodynamics and motion control[M]. Trondheim, Norway: John Wiley & Sons, 2011. |
| [33] | PRESTERO T T J. Verification of a six-degree of freedom simulation model for the REMUS autonomous underwater vehicle[D]. Commonwealth of Massachusetts, USA: Massachusetts Institute of Technology, 2001. |
| [34] | KHALIL H K. Nonlinear systems[M]. 3rd ed. Upper Saddle River, New Jersey, USA: Prentice Hall, 2002. |
| [1] | TSIOGKAS N, PAPADIMITRIOU G, SAIGOL Z, et al. Efficient multi-AUV cooperation using semantic knowledge representation for underwater archaeology missions[C]// 2014 Oceans-St. John’s. St. John’s, USA: IEEE, 2014: 1-6. |
| [2] |
MAHMOUDZADEH S, ABBASI A, YAZDANI A, et al. Uninterrupted path planning system for multi-USV sampling mission in a cluttered ocean environment[J]. Ocean Engineering, 2022, 254: 111328.
doi: 10.1016/j.oceaneng.2022.111328 URL |
| [3] |
MAHACEK P, KITTS C A, MAS I. Dynamic guarding of marine assets through cluster control of automated surface vessel fleets[J]. IEEE/ASME Transactions on Mechatronics, 2011, 17(1): 65-75.
doi: 10.1109/TMECH.2011.2174376 URL |
| [4] |
MINA T, SINGH Y, MIN B C. Maneuvering ability-based weighted potential field framework for multi-USV navigation, guidance, and control[J]. Marine Technology Society Journal, 2020, 54(4): 40-58.
doi: 10.4031/MTSJ.54.4.6 URL |
| [5] | NIU H, JI Z, LIGUORI P, et al. Design, integration and sea trials of 3D printed unmanned aerial vehicle and unmanned surface vehicle for cooperative missions[C]// 2021 IEEE/SICE International Symposium on System Integration (SII). Iwaki, Fukushima, Japan: IEEE, 2021: 590-591. |
| [6] | LACHAUD E, MONBEIG Y, NOLLEAU P, et al. Opportunities and challenges of remote operating a ROV embarked on a USV[C]// Offshore Technology Conference. Houston, Texas, USA: OnePetro, 2018. |
| [7] |
TRAN C, GUSHKOV I, NORDVIK K, et al. Operability analysis of control system for ROV launch-and-recovery from autonomous surface vessel[J]. Ocean Engineering, 2023, 277: 114272.
doi: 10.1016/j.oceaneng.2023.114272 URL |
| [8] |
ZWOLAK K, WIGLEY R, BOHAN A, et al. The autonomous underwater vehicle integrated with the unmanned surface vessel mapping the Southern Ionian Sea. The Winning Technology Solution of the Shell Ocean Discovery XPRIZE[J]. Remote Sensing, 2020, 12(8): 1344-1370.
doi: 10.3390/rs12081344 URL |
| [9] | 任章, 郭栋, 董希旺, 等. 飞行器集群协同制导控制方法及应用研究[J]. 导航定位与授时, 2019, 6(5): 1-9. |
| REN Zhang, GUO Dong, DONG Xiwang, et al. Research on the Ccooperative guidance and control method and application for aerial vehicle swarm systems[J]. Navigation Positioning and Timing, 2019, 6(5): 1-9. | |
| [10] | NANTOGMA S, RAN W, YANG X, et al. Behavior-based genetic fuzzy control system for multiple USVs cooperative target protection[C]// 2019 3rd International Symposium on Autonomous Systems (ISAS). Shanghai, China: IEEE, 2019: 181-186. |
| [11] | XU B, ZHANG J, WANG C. A real-time obstacle avoidance method for multi-AUV cluster based on artificial potential field[J]. Chinese Journal of Ship Research, 2018, 13(6): 66-71. |
| [1] | Peng Cheng, Chen Li, Fu Shenglai. Nonlinear Disturbance Observer of Clutch Slipping Torque for Multi-Mode Hybrid Electric Vehicles [J]. J Shanghai Jiaotong Univ Sci, 2026, 31(2): 420-427. |
| [2] | Qu Xingru, Li Chu, Jiang Yuze, Long Feifei, Zhang Rubo. Cooperative Pursuit of Unmanned Surface Vehicles Using Multi-Agent Reinforcement Learning [J]. J Shanghai Jiaotong Univ Sci, 2026, 31(1): 187-194. |
| [3] | QIAO Wenchao, NIE Weimin, DU Xuanmin, LIU Benqi, YE Tianming, YANG Tianlin. A Precise Control Method for Circular Motion of Unmanned Surface Vehicles for Circular Synthetic Aperture Sonar Imaging [J]. Journal of Shanghai Jiao Tong University, 2026, 60(1): 154-162. |
| [4] | CHEN Guoquan, LI Yuqin, HUANG Zike, YANG Shenhua. Autonomous Navigation Algorithm for Underactuated Unmanned Surface Vehicle Based on Model Predictive Control [J]. J Shanghai Jiaotong Univ Sci, 2025, 30(6): 1255-1264. |
| [5] | HE Tong, WEI Yali, LU Qing, BI Qian. Path Planning and Control of UAV Cluster Cooperative Reconnaissance Multi-Point Targets [J]. Air & Space Defense, 2025, 8(1): 31-40. |
| [6] | JIN Feiyu (金飞宇), CHEN Longsheng∗ (陈龙胜), LI Tongshuai (李统帅), SHI Tongxin (石童昕). Distributed Cooperative Anti-Disturbance Control for High-Order MIMO Nonlinear Multi-Agent Systems [J]. J Shanghai Jiaotong Univ Sci, 2024, 29(4): 656-666. |
| [7] | LI Jinjiang, XIANG Xianbo, LIU Chuan, YANG Shaolong. Robust Seabed Terrain Following Control of Underactuated AUV with Prescribed Performance Guidance Law Under Time Delay of Actuator [J]. Journal of Shanghai Jiao Tong University, 2022, 56(7): 944-952. |
| [8] | YANG Tao (杨 涛), ZHAO Jiankang∗ (赵健康). Solution to Long-Range Continuous and Precise Positioning in Deep Ocean for Autonomous Underwater Vehicles Using Acoustic Range Estimation and Inertial Sensor Measurements [J]. J Shanghai Jiaotong Univ Sci, 2022, 27(3): 281-297. |
| [9] | FANG Haolin (房浩霖), ZHANG Jiawen (张家闻), LI Jiawang∗ (李家旺). Switched Three-Dimensional Decoupling Stabilization of Underactuated Autonomous Underwater Vehicles [J]. J Shanghai Jiaotong Univ Sci, 2022, 27(3): 383-392. |
| [10] | WU Lihong, FENG Xisheng, YE Zuolin, LI Yiping. Physics-Based Simulation of AUV Forced Diving by Self-Propulsion [J]. Journal of Shanghai Jiao Tong University, 2021, 55(3): 290-296. |
| [11] | YU Te, WANG Lei. Algorithm and Experimental Verification of Self-Assembling Platform Based on Cooperative Control [J]. Journal of Shanghai Jiao Tong University, 2021, 55(11): 1493-1498. |
| [12] | LI Pengbo, YUAN Mingzhe, XIAO Jinchao, XIONG Junfeng. Station Keeping Guidance Strategy Based on Course Constraint for Unmanned Surface Vehicles [J]. Journal of Shanghai Jiaotong University, 2020, 54(9): 987-993. |
| [13] | LI Yueming,WANG Xiaoping,ZHANG Junjun,CAO Jian,ZHANG Yinghao. X-Rudder Autonomous Underwater Vehicle Control Allocation Based on Improved Quadratic Programming Algorithm [J]. Journal of Shanghai Jiaotong University, 2020, 54(5): 524-531. |
| [14] | PANG Shikun,LIANG Xiaofeng,LI Yinghui,YI Hong. Collision Avoidance Strategy for Autonomous Underwater Vehicle Based on Null-Space-Based Behavioral Approach [J]. Journal of Shanghai Jiaotong University, 2020, 54(3): 295-304. |
| [15] | WU Xin (武星), PU Juan (蒲娟), XIE Shaorong (谢少荣) . Attacking Strategy of Multiple Unmanned Surface Vehicles with Improved GWO Algorithm Under Control of Unmanned Aerial Vehicles [J]. Journal of Shanghai Jiao Tong University (Science), 2020, 25(2): 201-207. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||