Journal of Shanghai Jiao Tong University ›› 2021, Vol. 55 ›› Issue (3): 290-296.doi: 10.16183/j.cnki.jsjtu.2019.191
Special Issue: 《上海交通大学学报》2021年“交通运输工程”专题; 《上海交通大学学报》2021年12期专题汇总专辑
Previous Articles Next Articles
WU Lihong1,2, FENG Xisheng2( ), YE Zuolin1, LI Yiping2
), YE Zuolin1, LI Yiping2
Received:2019-06-30
Online:2021-03-01
Published:2021-04-02
Contact:
FENG Xisheng
E-mail:fengxsh@mail.cae.ac.cn
CLC Number:
WU Lihong, FENG Xisheng, YE Zuolin, LI Yiping. Physics-Based Simulation of AUV Forced Diving by Self-Propulsion[J]. Journal of Shanghai Jiao Tong University, 2021, 55(3): 290-296.
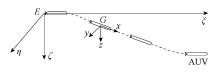
Fig.1
AUV diving scheme by self-propulsion
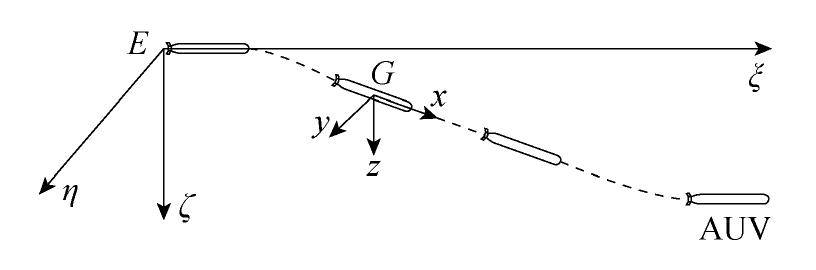
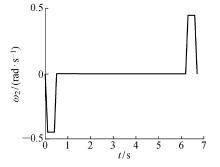
Fig.2
Pitch rate during AUV diving
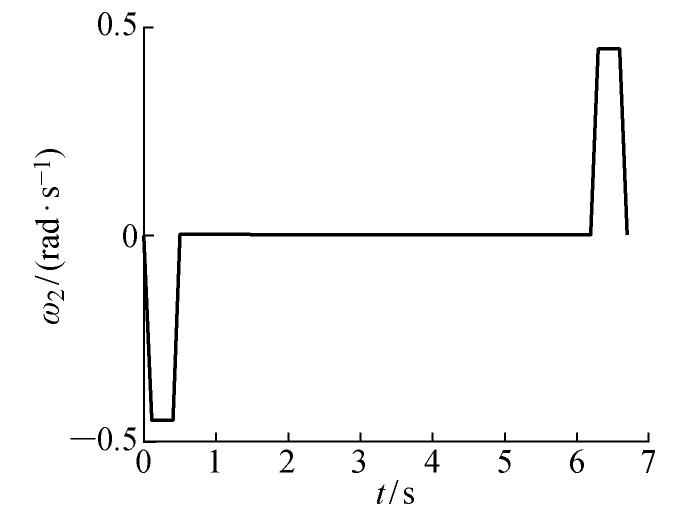
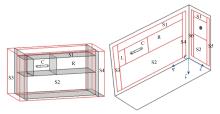
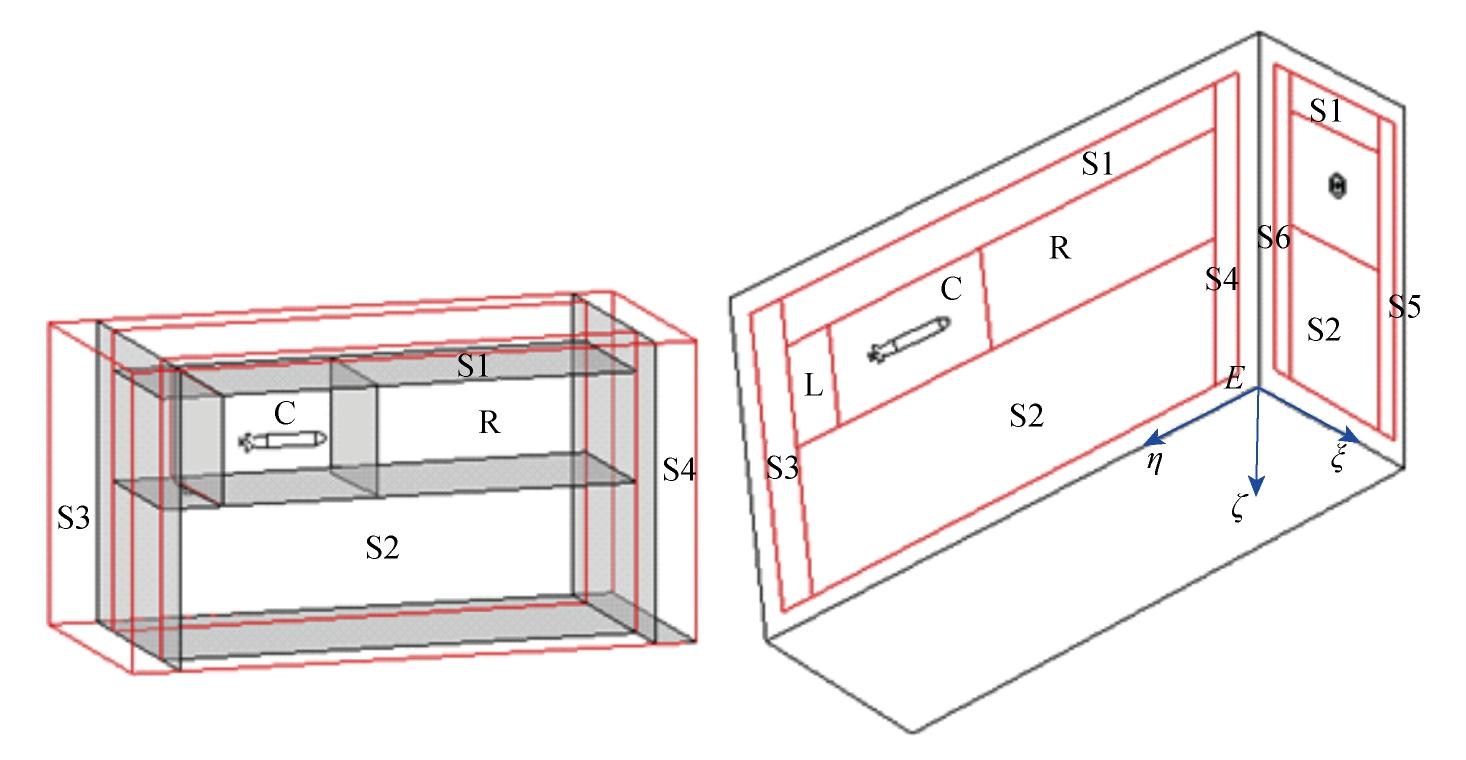
Fig.3
Domain topology of AUV diving
Tab.1
Mesh type and motion pattern
| 区域 | 网格总数 | 网格类型 | 随AUV纵倾/移动 | 随螺旋桨旋转 | 区域 | 网格总数 | 网格类型 | 随AUV纵倾/移动 | 随螺旋桨旋转 |
|---|---|---|---|---|---|---|---|---|---|
| AUV和舵翼 | 269 320 | 六面体 | 是/是 | 否 | S1,S2 | 140 184 | 六面体 | 否/是 | 否 |
| 螺旋桨 | 652 586 | 四面体 | 是/是 | 是 | S3,S4 | 23 328 | 六面体 | 否/否 | 否 |
| C | 510 324 | 四面体 | 否/是 | 否 | S5,S6 | 96 120 | 六面体 | 否/否 | 否 |
| L,R | 175 032 | 六面体 | 否/是 | 否 | 总计 | 1 866 894 | |||

Fig.4
AUV grid system
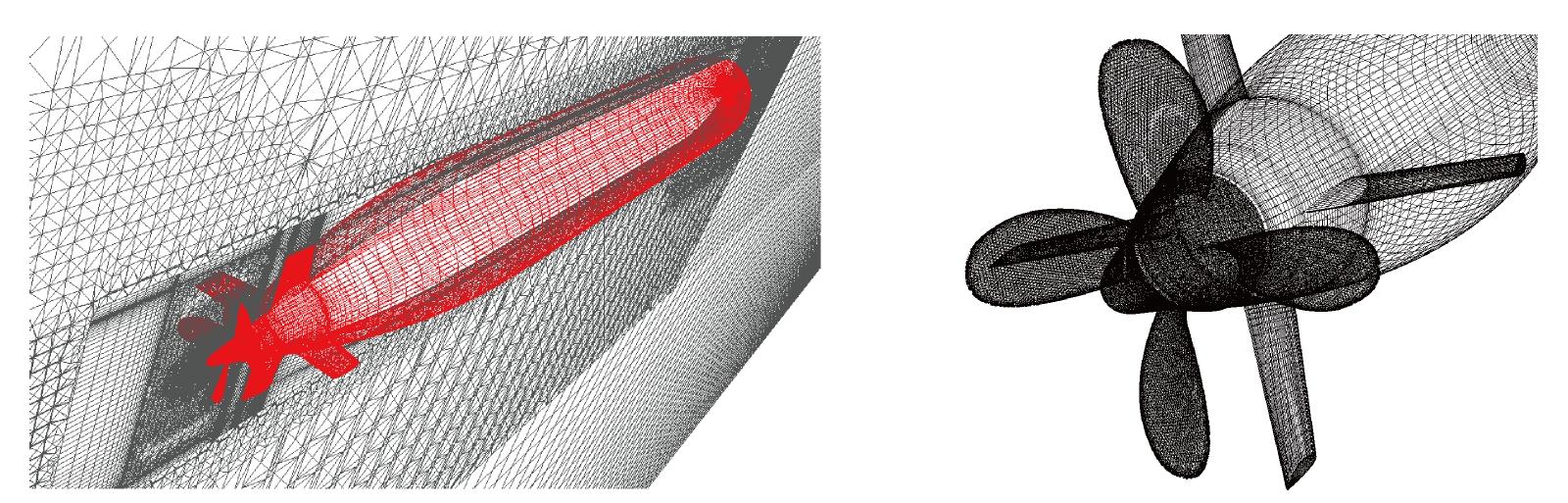
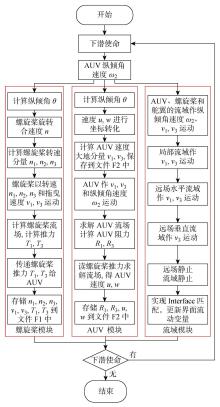
Fig.5
Flowchart of AUV forced diving motion
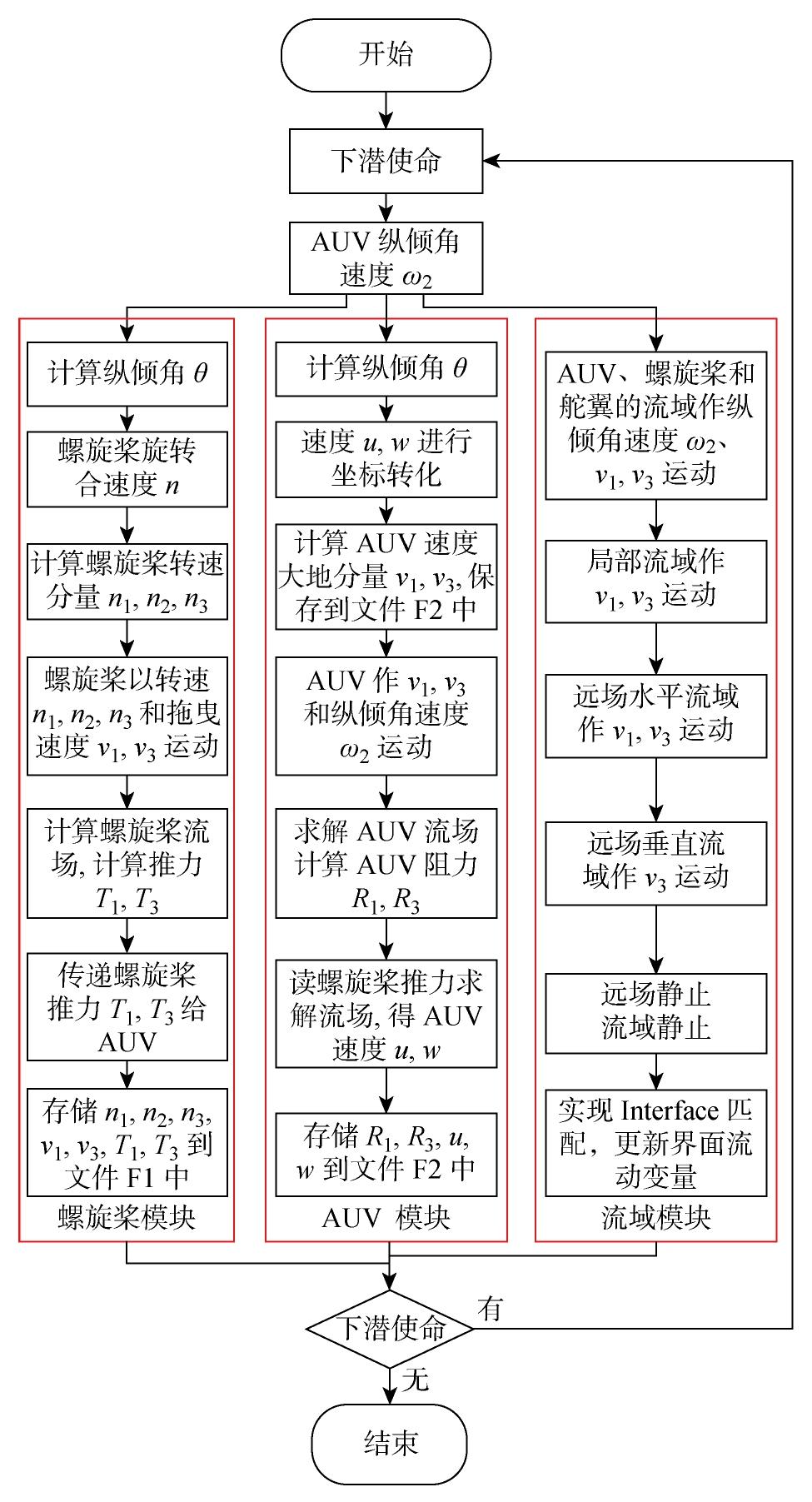
Fig.6
Comparison of experimental and numerical results of open water curve
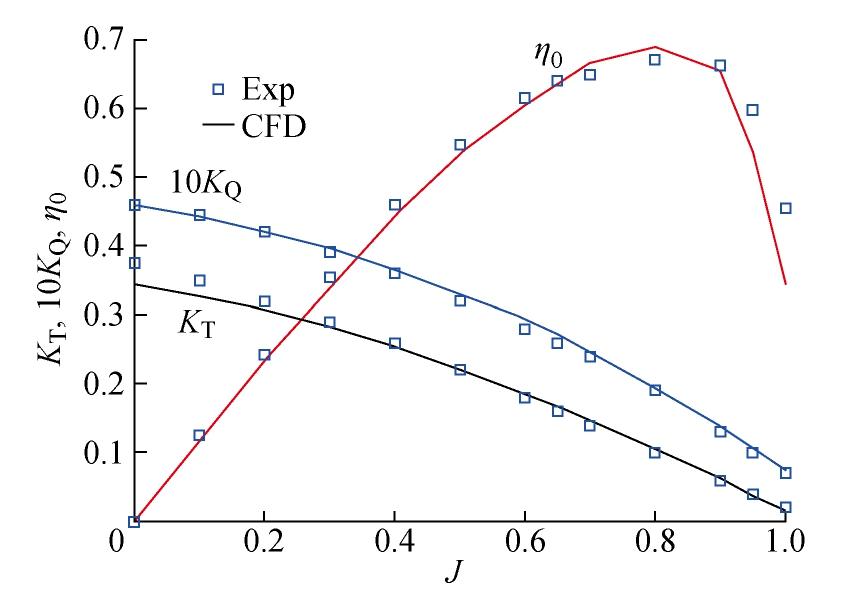
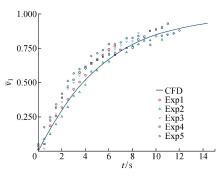
Fig.7
Comparison of computational and experimental data of AUV’s velocity in self-propulsion
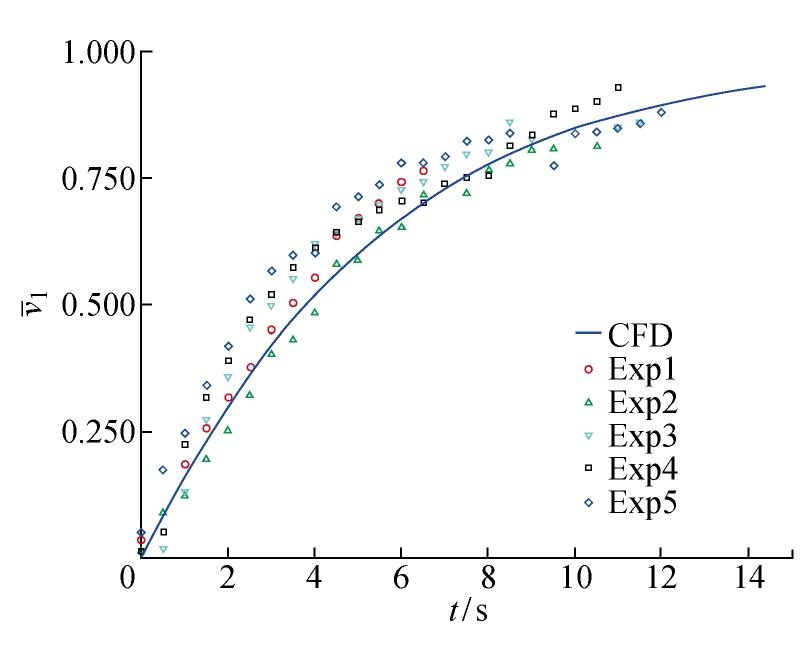

Fig.8
Meshing at different times (plane ofη=0)
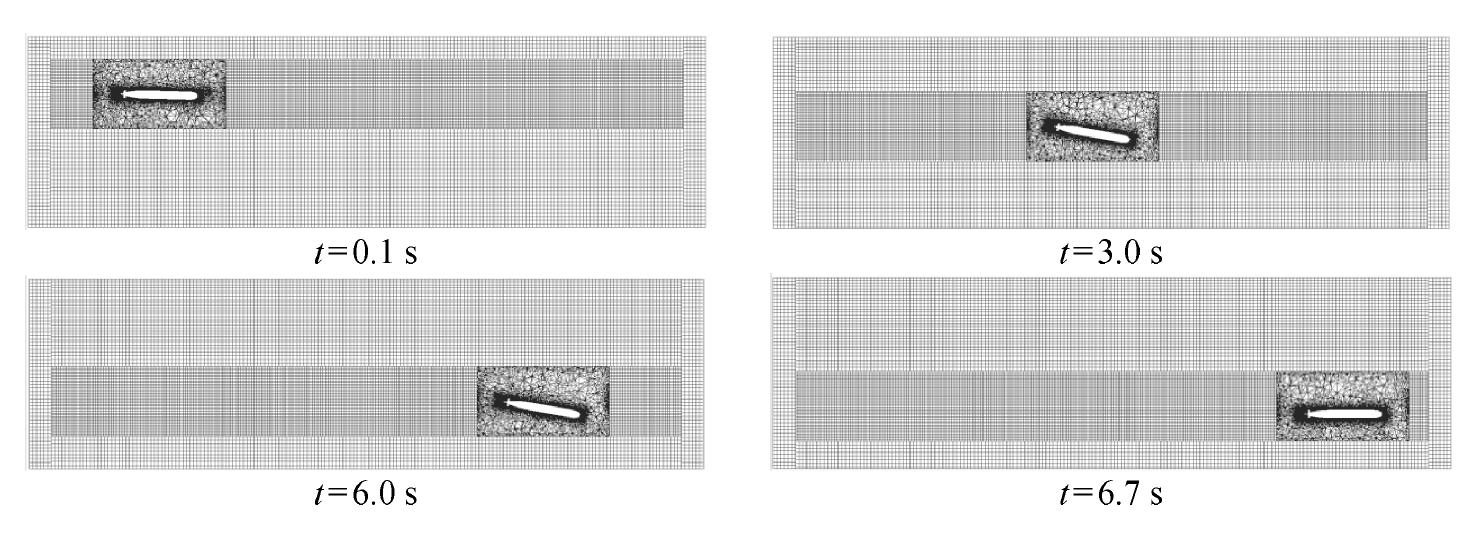
Fig.9
AUV resistances along longitudinal and vertical directions
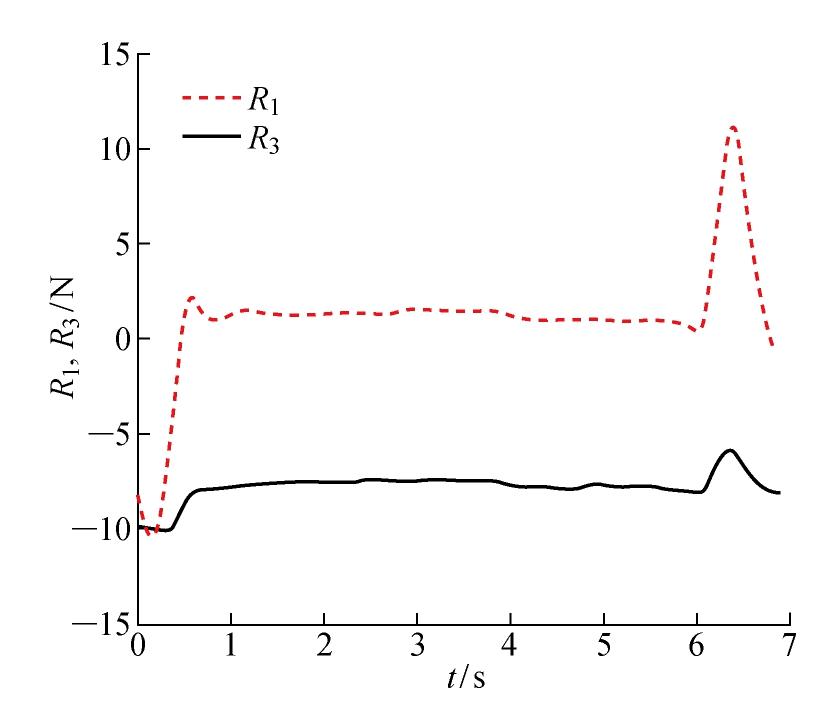

Fig.10
Propeller thrusts along longitudinal and vertical directions
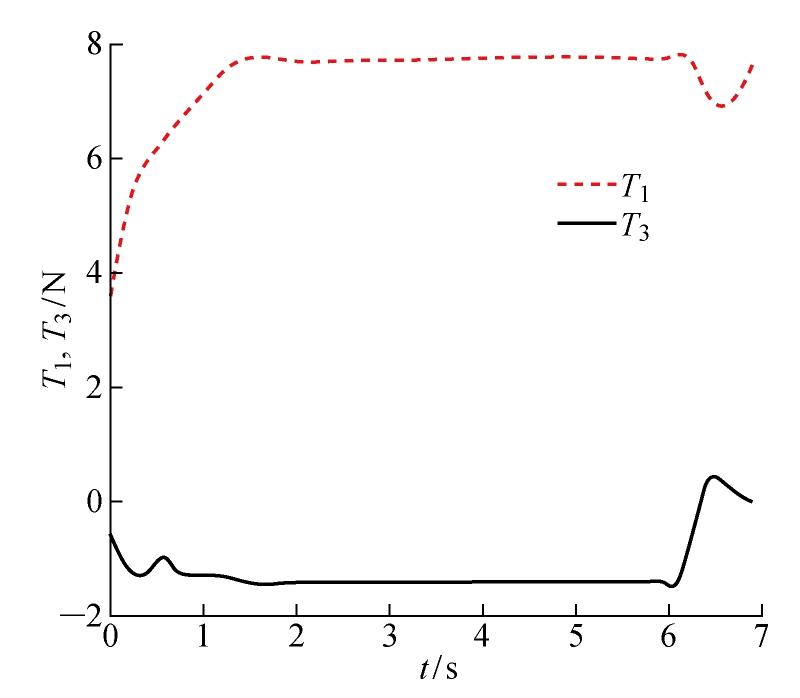
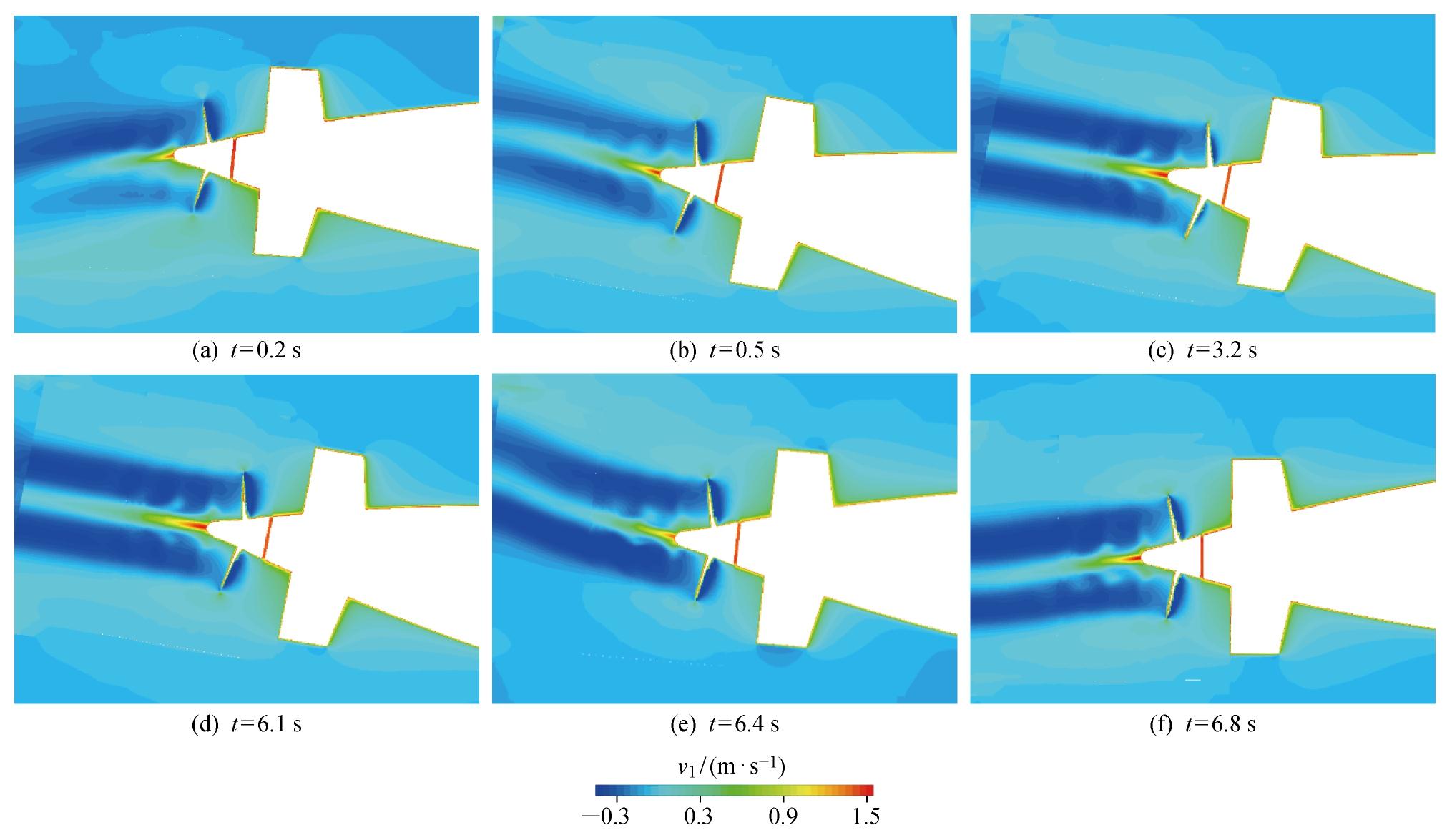
Fig.11
Closed-up velocity contours at AUV’s stern at different times
| [1] | 王波,苏玉民,秦再白.微小型水下机器人操纵性能与运动仿真研究[J].系统仿真学报,2009, 21(13): 4149-4158. |
| WANG Bo, SU Yumin, QIN Zaibai. Research on maneuverability and simulation of small autonomous underwater vehicle [J]. Journal of System Simulation, 2009, 21(13): 4149-4158. | |
| [2] | 陈江.AUV垂直面运动控制过程中自抗扰方法研究[D]. 哈尔滨: 哈尔滨工程大学,2011. |
| CHEN Jiang. Research of AUV motion control in vertical plane based on ADRC[D]. Harbin: Harbin Engineering University, 2011. | |
| [3] | 王建华,万德成.船舶操纵运动CFD数值模拟研究进展[J].哈尔滨工程大学学报,2018, 39(5): 813-824. |
| WANG Jianhua, WAN Decheng. CFD simulations of ship maneuvering motion [J]. Journal of Harbin Engineering University, 2018, 39(5): 813-824. | |
| [4] | CARRICA P M, FU H P, STERN F. Computations of self-propulsion free to sink and trim and of motions in head waves of the KRISO Container Ship (KCS) model [J]. Applied Ocean Research, 2011, 33: 309-320. |
| [5] | CARRICA P M, HOSSEINI H S, STERN F. CFD analysis of broaching for a model surface combatant with explicit simulation of moving rudders and rotating propellers[J]. Computers & Fluids, 2012, 53: 117-132. |
| [6] | CARRICA P M, ISMAIL F, HYMAN M, et al. Turn and ZigZag maneuvers of a surface combatant using a URANS approach with dynamic overset grids[J]. Journal of Marine Science and Technology, 2013, 18: 166-181. |
| [7] | CHASE N, CARRICA P M. Submarine propeller computations and application to self-propulsion of DARPA Suboff [J]. Ocean Engineering, 2013, 60: 68-80. |
| [8] | SNYDER D, KOUTSAVDIS E, ANTTONEN J. Transonic store separation using unstructured CFD with dynamic meshing [C]∥33rd AIAA Fluid Dynamics Conference and Exhibit. Orlando, Florida: AIAA, 2003, 3919: 1-8. |
| [9] | CAVALLO P A, SINHA N, FELDMAN G M. Parallel unstructured mesh adaptation for transient moving body and aero-propulsive applications[C]∥42nd AIAA Aerospace Sciences Meeting and Exhibit. RENO, Nevada: AIAA, 2004, 1057: 1-11. |
| [10] | 吴利红,封锡盛,胡志强.三维动态混合网格在AUV发射过程中的应用[J].船舶力学,2010, 14(7): 717-722. |
| WU Lihong, FENG Xisheng, HU Zhiqiang. Application of 3-D hybrid dynamic grids to simulate the flow in AUV swim-out[J]. Journal of Ship Mechanics, 2010, 14(7): 717-722. | |
| [11] | WU L H, LI Y P, SU S J, et al. Hydrodynamic analysis of AUV underwater docking with a cone-shaped dock under ocean currents [J]. Ocean Engineering, 2014, 85: 110-126. |
| [12] | ZHANG L P, DENG X G, ZHANG H X. Reviews of moving grid generation techniques and numerical methods for unsteady flow [J]. Advances in Mechanics, 2010, 40(4): 424-446. |
| [13] | ZHAN J M, CAI W H, HU W Q, et al. Numerical study on the six-DOF anchoring process of gravity anchor using a new mesh update strategy [J]. Marine Structures, 2017, 52: 173-187 |
| [14] | 魏成柱,李英辉,易宏.多面体网格在船体绕流计算中的应用[J].上海交通大学学报,2016, 50(8): 1144-1153. |
| WEI Chengzhu, LI Yinghui, YI Hong. Application of Polyhedral mesh in numerical simulation of flow around hulls[J]. Journal of Shanghai Jiao Tong University, 2016, 50(8): 1144-1153. | |
| [15] | 吴利红,李一平,刘开周,等. 基于多块动态混合网格的AUV自航类物理数值模拟[J].机器人,2019, 41(6): 706-712. |
| WU Lihong, LI Yiping, LIU Kaizhou, et al. A physics-based numerical simlulation of AUV self-propulsion using multi-block hybrid dynamic mesh method [J]. ROBOT, 2019, 41(6): 706-712. | |
| [16] | 艾晓锋.基于动网格技术的AUV自航数值模拟研究[D].大连: 大连海事大学,2017. |
| AI Xiaofeng. Numerical simulation of AUV self-propulsion based on moving mesh method [D]. Dalian: Dalian Maritime University, 2017. | |
| [17] | 盛振邦,刘应中.船舶原理(下册)[M]. 上海: 上海交通大学出版社,2005: 160-164. |
| SHENG Zhenbang, LIU Yingzhong. Ship theory (Vol.2) [M]. Shanghai: Shanghai Jiao Tong University Press, 2005: 160-164. |
| [1] | QIN Guangfei, YAO Huilan, ZHANG Huaixin. Numerical Study of Stern Vibration of a Self-Propulsion Ship in Propeller Induced Pressure Fluctuation [J]. Journal of Shanghai Jiao Tong University, 2022, 56(9): 1148-1158. |
| [2] | DING Enbao, CHANG Shengming, SUN Cong, ZHAO Leiming, WU Hao. Hydrodynamic Characteristics of a Surface Piercing Propeller Entering Water with Different Radiuses [J]. Journal of Shanghai Jiao Tong University, 2022, 56(9): 1188-1198. |
| [3] | LI Jinjiang, XIANG Xianbo, LIU Chuan, YANG Shaolong. Robust Seabed Terrain Following Control of Underactuated AUV with Prescribed Performance Guidance Law Under Time Delay of Actuator [J]. Journal of Shanghai Jiao Tong University, 2022, 56(7): 944-952. |
| [4] | YANG Tao (杨 涛), ZHAO Jiankang∗ (赵健康). Solution to Long-Range Continuous and Precise Positioning in Deep Ocean for Autonomous Underwater Vehicles Using Acoustic Range Estimation and Inertial Sensor Measurements [J]. J Shanghai Jiaotong Univ Sci, 2022, 27(3): 281-297. |
| [5] | FANG Haolin (房浩霖), ZHANG Jiawen (张家闻), LI Jiawang∗ (李家旺). Switched Three-Dimensional Decoupling Stabilization of Underactuated Autonomous Underwater Vehicles [J]. J Shanghai Jiaotong Univ Sci, 2022, 27(3): 383-392. |
| [6] | LIU Heng, WU Rui, SUN Shuo. Numerical Simulation of Propeller Cavitation in Non-Uniform Flow [J]. Journal of Shanghai Jiao Tong University, 2021, 55(8): 976-983. |
| [7] | WANG Chao, LIU Zheng, LI Xing, WANG Chunhui, XU Pei. Influence of Free-State Ice Size and Initial Position on Coupled Hydrodynamic Performance of Ice Propeller [J]. Journal of Shanghai Jiao Tong University, 2021, 55(8): 990-1000. |
| [8] | HE Jinhui, LI Mingguang, CHEN Jinjian, XIA Xiaohe. Particle-Fluid Coupling Algorithm Considering Dynamic Fluid Mesh [J]. Journal of Shanghai Jiao Tong University, 2021, 55(6): 645-651. |
| [9] | WANG Chao, YANG Bo, WANG Chunhui, GUO Chunyu, XU Pei. Ice Floe Trajectory Under the Action of Propeller Pumping [J]. Journal of Shanghai Jiao Tong University, 2021, 55(5): 505-512. |
| [10] | ZHANG Yu, WANG Xiaoliang. Simulation on Aeroelasticity of Flexible Propellers Based onRadial Point Interpolation Method [J]. Journal of Shanghai Jiaotong University, 2020, 54(9): 924-934. |
| [11] | XU Ye, XIONG Ying, HUANG Zheng. Test and Numerical Study of Propeller Cavitation Induced Fluctuating Pressure of Twin-Propeller Ship [J]. Journal of Shanghai Jiaotong University, 2020, 54(8): 831-838. |
| [12] | LI Yueming,WANG Xiaoping,ZHANG Junjun,CAO Jian,ZHANG Yinghao. X-Rudder Autonomous Underwater Vehicle Control Allocation Based on Improved Quadratic Programming Algorithm [J]. Journal of Shanghai Jiaotong University, 2020, 54(5): 524-531. |
| [13] | PANG Shikun,LIANG Xiaofeng,LI Yinghui,YI Hong. Collision Avoidance Strategy for Autonomous Underwater Vehicle Based on Null-Space-Based Behavioral Approach [J]. Journal of Shanghai Jiaotong University, 2020, 54(3): 295-304. |
| [14] | LI Qing,YU Han,YANG Deqing. Coupled Sound Field Calculating Method for Ship Underwater Noise Excited by Multiple Categories of Vibration and Sound Sources [J]. Journal of Shanghai Jiaotong University, 2019, 53(2): 161-169. |
| [15] | HUANG Fu-xiang, WU Chang-nan, LI Xiang, LI Xin-fei, LI Li-hui, YIN Bing-gang. Research on Inter-propeller Interference of Dynamic Positioning Vessel [J]. Ocean Engineering Equipment and Technology, 2019, 6(2): 536-543. |
| Viewed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
Full text 545
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
Abstract 988
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||