Journal of Shanghai Jiao Tong University ›› 2023, Vol. 57 ›› Issue (5): 593-600.doi: 10.16183/j.cnki.jsjtu.2021.456
Special Issue: 《上海交通大学学报》2023年“电子信息与电气工程”专题
• Electronic Information and Electrical Engineering • Previous Articles Next Articles
WEI Guangyu1,2,3, GU Chaochen1,2,3( ), YANG Shusheng1,2,3, GUAN Xinping1,2,3
), YANG Shusheng1,2,3, GUAN Xinping1,2,3
Received:2021-11-12
Revised:2022-01-09
Accepted:2022-01-11
Online:2023-05-28
Published:2023-06-02
Contact:
GU Chaochen
E-mail:jacygu@sjtu.edu.cn.
CLC Number:
WEI Guangyu, GU Chaochen, YANG Shusheng, GUAN Xinping. Decoupling and Synchronization Control of Asymmetric Flexure-Linked Dual-Drive Gantry Stage[J]. Journal of Shanghai Jiao Tong University, 2023, 57(5): 593-600.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2021.456

Fig.1
Asymmetric flexure-linked dual-drive gantry test bed and its flexible supporting structures

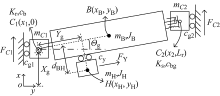
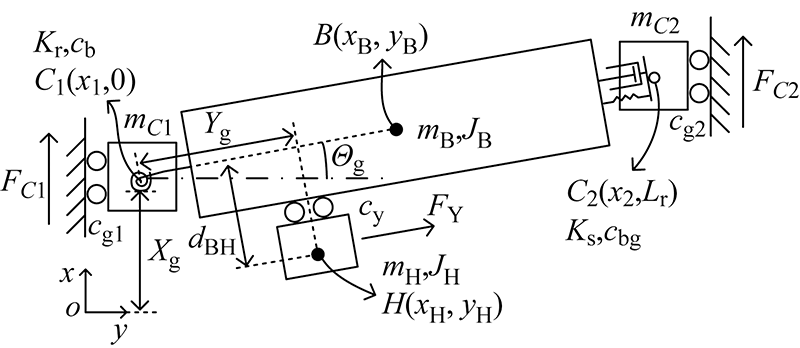
Fig.2
Modeling diagram of asymmetric flexure-linked dual-drive gantry positioning stage
Tab.1
Parameters of dual-drive gantry test bed
| 参数 | 含义 | 取值 |
|---|---|---|
| mC1/kg | C1侧底座(含柔性支撑)总质量 | 9.9 |
| mC2/kg | C2侧底座(含柔性支撑)总质量 | 9.85 |
| mH/kg | 工作头(移动负载)质量 | 7.6 |
| mB/kg | 横梁质量 | 26.8 |
| JH/(kg·m2) | 工作头绕自身重心的转动惯量 | 0.038 |
| JB/(kg·m2) | 横梁绕自身重心的转动惯量 | 3.2 |
| dBH/m | 工作头(移动负载)重心偏移量 | 0.1 |
| Lr/m | 龙门试验台跨度 | 1.2 |
| Kr/(N·m·rad-1) | 回转柔性支撑的转动刚度 | 28 500 |
| Ks/(N·m-1) | 偏扭柔性支撑的刚度 | 125 000 |
| cg1,cg2/(N·m-1·s) | 双驱轴导轨阻尼系数 | 20.3 |
| cy/(N·m-1·s) | 横梁轴导轨阻尼系数 | 32.5 |
| cb/(N·m·rad-1·s) | 回转柔性支撑旋转阻尼系数 | 300 |
| cbg/(N·m-1·s) | 偏扭柔性支撑阻尼系数 | 3 750 |
| FC1,FC2 | 两侧电动机推力 | — |
| FY | 横梁轴电动机推力 | — |

Fig.3
Test result of repeated positioning accuracy using SJ6000 Laser Interferometer

Fig.4
Comparison of system translational step responses in model-compensated 2nd-order ESO control and non-compensated PID control
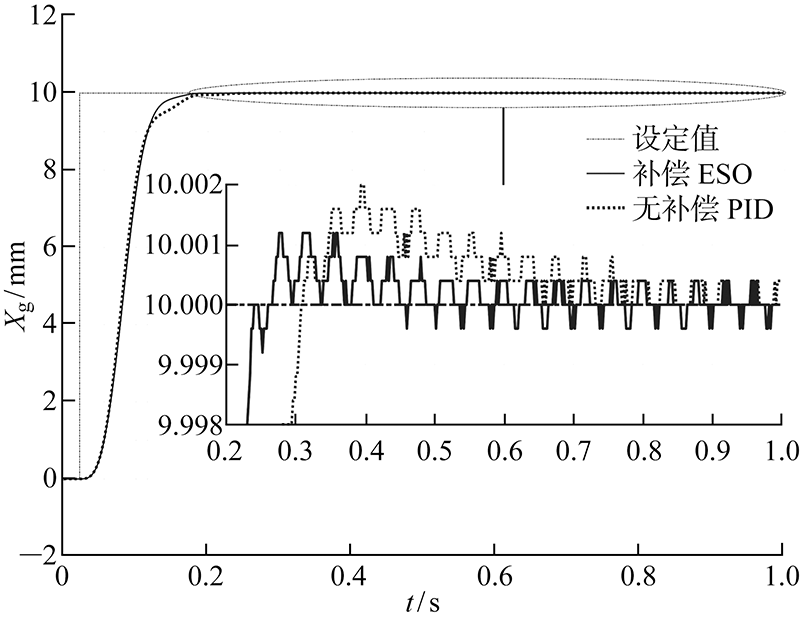
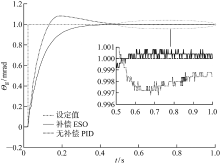
Fig.5
Comparison of system rotational step responses in model-compensated 3rd-order ESO control and non-compensated PID control
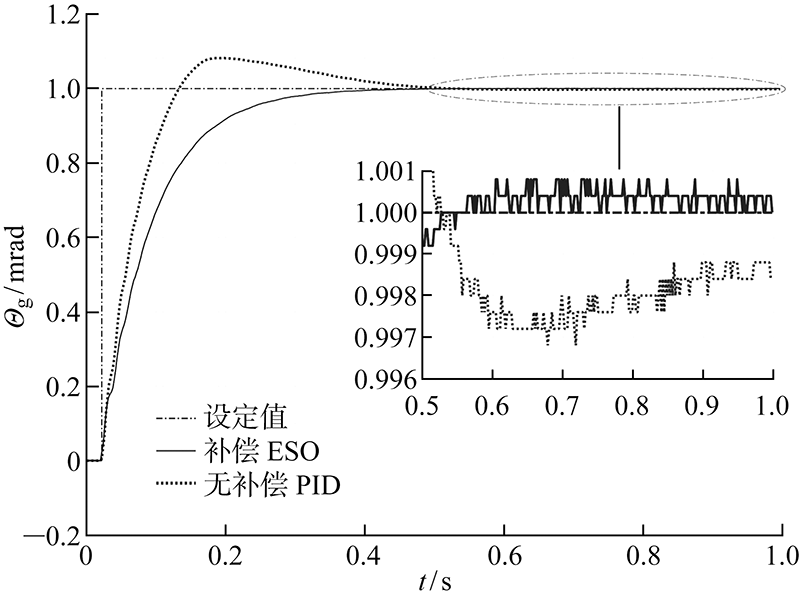
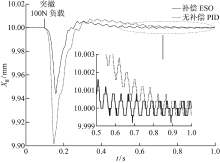
Fig.6
Comparison of system responses in step load disturbance using model-compensated ESO control and non-compensated PID control
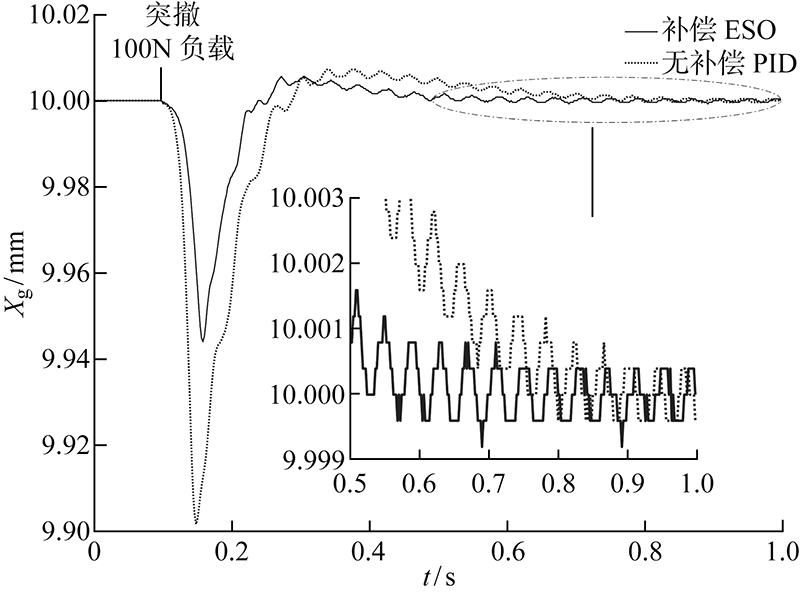
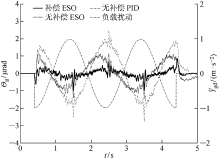
Fig.7
Comparison of system responses in sinusoidal load disturbances using model-compensated ESO control, non-compensated ESO control, and non-compensated PID control

| [1] | 李超.冗余直驱龙门系统的多输入多输出精密运动控制[D]. 杭州: 浙江大学, 2018. |
| LI Chao. MIMO precision motion control of redundantly driven gantry systems with direct actuators[D]. Hangzhou: Zhejiang University, 2018. | |
| [2] |
KAMALDIN N, CHEN S L, TEO C S, et al. A novel adaptive jerk control with application to large workspace tracking on a flexure-linked dual-drive gantry[J]. IEEE Transactions on Industrial Electronics, 2019, 66(7): 5353-5363.
doi: 10.1109/TIE.2018.2870391 URL |
| [3] |
GIAM T S, TAN K K, HUANG S. Precision coordinated control of multi-axis gantry stages[J]. ISA Transactions, 2007, 46(3): 399-409.
pmid: 17434516 |
| [4] |
GARCÍA-HERREROS I, KESTELYN X, GOMAND J, et al. Model-based decoupling control method for dual-drive gantry stages: A case study with experimental validations[J]. Control Engineering Practice, 2013, 21(3): 298-307.
doi: 10.1016/j.conengprac.2012.10.010 URL |
| [5] |
MA J, CHEN S L, KAMALDIN N, et al. Integrated mechatronic design in the flexure-linked dual-drive gantry by constrained linear-quadratic optimization[J]. IEEE Transactions on Industrial Electronics, 2017, 65(3): 2408-2418.
doi: 10.1109/TIE.2017.2740825 URL |
| [6] | 黎炜天, 廖俊鸿, 王忠诚. 基于终端滑模控制的龙门平台同步控制设计[J]. 仪表技术, 2020(5): 36-40. |
| LI Weitian, LIAO Junhong, WANG Zhongcheng. Design of synchronous control on the gantry platform based on sliding mode control[J]. Instrumentation Technology, 2020(5): 36-40. | |
| [7] | 李萍, 朱国力, 龚时华, 等. 基于干扰观测器的龙门机床双驱系统的同步控制[J]. 中国机械工程, 2016, 27(19): 2630-2636. |
| LI Ping, ZHU Guoli, GONG Shihua, et al. Synchronous control of dual-drive system in gantry-type machine tools based on disturbance observer[J]. China Mechanical Engineering, 2016, 27(19): 2630-2636. | |
| [8] | JUNG H, OH S. Disturbance observer based decoupling control to suppress rotational motion of cross-coupled gantry stage[C]//2019 IEEE 28th International Symposium on Industrial Electronics. Vancouver, Canada: IEEE, 2019: 503-508. |
| [9] |
HAN J Q. From PID to active disturbance rejection control[J]. IEEE Transactions on Industrial Electronics, 2009, 56(3): 900-906.
doi: 10.1109/TIE.2008.2011621 URL |
| [10] |
YANG J, CHEN W H, LI S H, et al. Disturbance/uncertainty estimation and attenuation techniques in PMSM drives—A survey[J]. IEEE Transactions on Industrial Electronics, 2017, 64(4): 3273-3285.
doi: 10.1109/TIE.2016.2583412 URL |
| [11] | 李大字, 李憧, 靳其兵. 不确定系统的滑模与自抗扰控制方法[J]. 上海交通大学学报, 2016, 50(6): 917-922. |
| LI Dazi, LI Chong, JIN Qibing. Sliding mode active disturbance rejection control of uncertain system[J]. Journal of Shanghai Jiao Tong University, 2016, 50(6): 917-922. | |
| [12] | LI P, ZHU G L, HE B N, et al. Synchronization control for dual-drive system of gantry-type machine tools based on extended state observer[C]// 2018 IEEE/ASME International Conference on Advanced Intelligent Mechatronics. Auckland, New Zealand: IEEE, 2018: 1299-1304. |
| [13] | 谷朝臣, 位广宇, 杨舒盛. 龙门滑台柔性铰链支撑组件及其龙门双驱装置: CN 113334096 A[P]. 2021-09-03 [2021-11-10]. |
| GU Chaochen, WEI Guangyu, YANG Shusheng. Flexure link supporting component and dual-drive device for gantry positioning stage: CN 113334096 A[P]. 2021-09-03 [2021-11-10]. | |
| [14] | 王永岗. 分析力学[M]. 北京: 清华大学出版社, 2019. |
| WANG Yonggang. Analytical mechanics[M]. Beijing: Tsinghua University Press, 2019. | |
| [15] |
LI S H, YANG J, CHEN W H, et al. Generalized extended state observer based control for systems with mismatched uncertainties[J]. IEEE Transactions on Industrial Electronics, 2012, 59(12): 4792-4802.
doi: 10.1109/TIE.2011.2182011 URL |
| [1] | GUO Ziteng, WANG Han, WANG Fuwen, CAO Yunfeng, ZHANG Jianwen, CAI Xu. Analysis of Four-Quadrant Control Characteristics and Parameter Design of Inertia Synchronized Three-Phase PWM Converter [J]. Journal of Shanghai Jiao Tong University, 2026, 60(2): 277-288. |
| [2] | Chen Qiuzhuo, Zhu Biao, Ma Lixiang, Liu Bingyou, Wan Luanfei. Underactuated System Control Based on Improved Active Disturbance Rejection Control [J]. J Shanghai Jiaotong Univ Sci, 2026, 31(2): 428-439. |
| [3] | LI Conglin, HUANG Jinfeng, ZHANG Qian, CHEN Xu. Improved Sliding Mode Active Disturbance Rejection Control for SIDO Buck Converter Based on High-Order Filtering Super-Twisting ESO [J]. Journal of Shanghai Jiao Tong University, 2026, 60(1): 87-99. |
| [4] | HUANG JinFeng, ZHANG Qian. Cascade Sliding Mode Decoupling Control of Coupled Inductor Single-Input Dual-Output Buck Converter Based on Super-Twisting Extend State Observer [J]. Journal of Shanghai Jiao Tong University, 2025, 59(5): 592-604. |
| [5] | JIANG Biao, LIU Jia, ZENG Pingliang, TANG Zao, LI Yalou. Two-Stage Robust Planning for Transmission Network Considering Adaptive Decision of Carbon Trading Volume [J]. Journal of Shanghai Jiao Tong University, 2024, 58(6): 826-835. |
| [6] | WANG Xianzhi, LI Guofei, CHANG Ya’nan. Distributed Extended State Observer-Based Formation Control of Multiple Flight Vehicles [J]. Journal of Shanghai Jiao Tong University, 2024, 58(11): 1798-1804. |
| [7] | CHEN Jing, KE Shitang, LI Wenjie, ZHU Tingrui, YUN Yiwen, REN Hehe. Unsteady Evolution Law and Evaluation Index of Shallow Sea Wind-Wave-Current-Seabed Coupling Field [J]. Journal of Shanghai Jiao Tong University, 2023, 57(6): 666-679. |
| [8] | TAO Haijun, DU Changshun, ZHANG Jinsheng, ZHENG Zheng. Generating Mechanism and Suppression of Impulse Voltage on Secondary Bus of Marine Electromagnetic Transmitter [J]. Journal of Shanghai Jiao Tong University, 2023, 57(12): 1597-1608. |
| [9] | LYU Shuo, ZHANG Qingzhen, GUO Yunhe, FENG Shuo. Attitude Control of Missile with Deflectable Nose Based on Backstepping Sliding Mode Control [J]. Air & Space Defense, 2022, 5(4): 30-37. |
| [10] | LI Yanbiao∗ (李研彪), CHEN Ke (陈 科), SUN Peng (孙 鹏), WANG Zesheng (王泽胜). Dynamic Modeling and Performance Evaluation of a Novel Humanoid Ankle Joint [J]. J Shanghai Jiaotong Univ Sci, 2022, 27(4): 570-578. |
| [11] | LIANG Liang1 (梁 良), SHI Ying1∗ (石 英), MOU Junmin2∗ (牟军敏). Submarine Multi-Model Switching Control Under Full Working Condition Based on Machine Learning [J]. J Shanghai Jiaotong Univ Sci, 2022, 27(3): 402-410. |
| [12] | LI Han, ZHANG Botao, WANG Junjie, SUN Yunda, GONG Shengjie. Decoupling of Vibration and Temperature Signals of Fiber Bragg Grating Sensor [J]. Journal of Shanghai Jiao Tong University, 2022, 56(2): 214-222. |
| [13] | WAN Hui, QI Xiaohui, LI Jie. Linear Matrix Inequality Based Stability Analysis of Linear/Nonlinear Switching Active Disturbance Rejection Control System [J]. Journal of Shanghai Jiao Tong University, 2022, 56(11): 1491-1501. |
| [14] | LI Qingbo, FANG Zeyuan, CHEN Guoliang, MEI Zhiwei, YANG Ting. Research on Decoupling Algorithm of Strapdown Seeker Based on Tracking Differentiator [J]. Air & Space Defense, 2021, 4(4): 44-49. |
| [15] | HOU Jue, YAO Dongwei, WU Feng, LÜ Chenglei, WANG Han, SHEN Junhao. Control Strategy for Electric Vehicle Range-Extender Based on Hybrid Excitation Generator [J]. Journal of Shanghai Jiao Tong University, 2021, 55(2): 206-212. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||