Journal of Shanghai Jiao Tong University ›› 2022, Vol. 56 ›› Issue (11): 1491-1501.doi: 10.16183/j.cnki.jsjtu.2021.203
• Guidance, Navigation and Control • Previous Articles Next Articles
WAN Hui, QI Xiaohui( ), LI Jie
), LI Jie
Received:2021-06-11
Online:2022-11-28
Published:2022-12-02
Contact:
QI Xiaohui
E-mail:qi-xh@163.com
CLC Number:
WAN Hui, QI Xiaohui, LI Jie. Linear Matrix Inequality Based Stability Analysis of Linear/Nonlinear Switching Active Disturbance Rejection Control System[J]. Journal of Shanghai Jiao Tong University, 2022, 56(11): 1491-1501.
Tab.1
Parameters of different system models
| 系统 | a14 | a13 | a12 | a11 | a24 | a23 | a22 | a21 |
|---|---|---|---|---|---|---|---|---|
| 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 2 | -1 | 0 | -2 | 0 | 0 | -8 | 0 | -6 |
| 3 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 2 |
| 4 | -1 | 0 | 2 | 0 | 0 | -8 | 0 | 6 |
Tab.2
Parameters of SADRC controllers
| y1通道 | y2通道 |
|---|---|
| α1=1, α2=0.5, α3=0.25, wc=1.1, wo=10, woN=5, δs=0.005, δ=0.002, b0=1, β01=3 woN, β02=3 woN2/5, β03= woN3/9 | α1=1, α2=0.5, α3=0.25, wc=1.68, wo=10, woN =5, δs=0.005, δ=0.002, b0=1, β01=3 woN, β02=3 woN2/5, β03= woN3/9 |

Fig.1
Tracking performance of two channels of controlled object
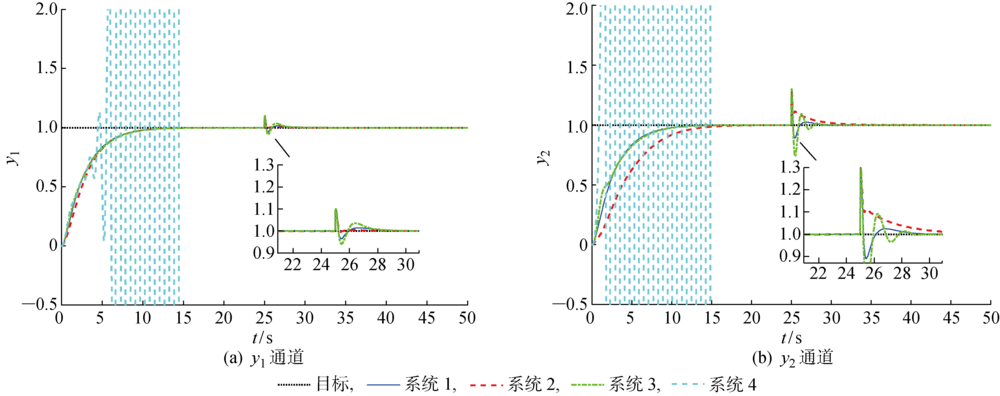

Fig.2
Tracking performance of two channels of controlled object (-10% perturbation of model parameters)


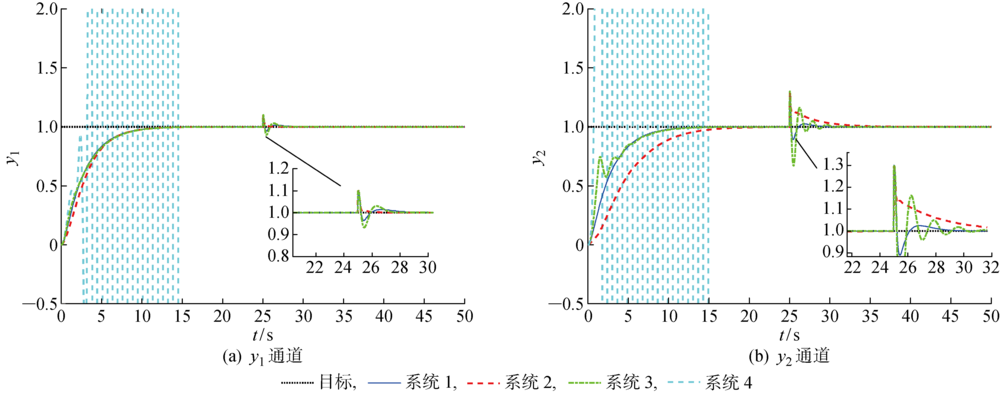
Fig.3
Tracking performance of two channels of controlled object (+10% perturbation of model parameters)
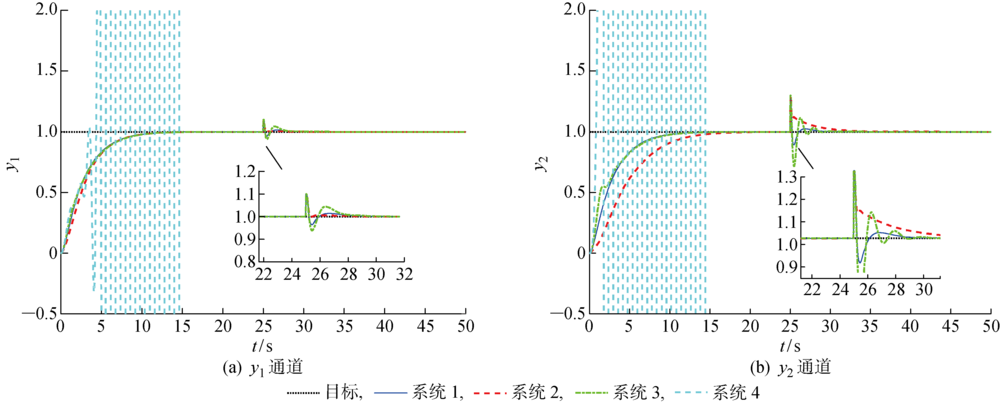

Fig.4
Tracking performance of two channels of controlled object (-30% perturbation of model parameters)


Fig.5
Tracking performance of two channels of controlled object (+30% perturbation of model parameters)
| [1] | 韩京清. 自抗扰控制器及其应用[J]. 控制与决策, 1998, 13(1): 19-23. |
| HAN Jingqing. Auto-disturbances-rejection controller and its applications[J]. Control and Decision, 1998, 13(1): 19-23. | |
| [2] | 黄一, 韩京清. 非线性连续二阶扩张状态观测器的分析与设计[J]. 科学通报, 2000, 45(13): 1373-1379. |
|
HUANG Yi, HAN Jingqing. Analysis and design of nonlinear continunous second-order extended state observer[J]. Chinese Science Bulletin, 2000, 45(13): 1373-1379.
doi: 10.1007/BF02886240 URL |
|
| [3] | HUANG Y, WAN H, SONG J. Analysis and design for third order nonlinear continuous extended states observer[C] ∥Proceedings of the 19th Chinese Control Conference. Hong Kong, China: IEEE, 2000. |
| [4] | 陈刚, 张兆靖, 杨慧中. 基于变结构的自抗扰控制器[J]. 化工自动化及仪表, 2007, 34(6): 16-19. |
| CHEN Gang, ZHANG Zhaojing, YANG Huizhong. Auto disturbance rejection controller based on variable structure[J]. Control and Instruments in Chemical Industry, 2007, 34(6): 16-19. | |
| [5] |
ZHAO Z L, GUO B Z. On active disturbance rejection control for nonlinear systems using time-varying gain[J]. European Journal of Control, 2015, 23: 62-70.
doi: 10.1016/j.ejcon.2015.02.002 URL |
| [6] | GAO Z Q. Scaling and bandwidth-parameterization based controller tuning[C]∥Proceedings of the 2003 American Control Conference. Colorad, USA: IEEE, 2003: 4989-4996. |
| [7] | 陈增强, 孙明玮, 杨瑞光. 线性自抗扰控制器的稳定性研究[J]. 自动化学报, 2013, 39(5): 574-580. |
|
CHEN Zengqiang, SUN Mingwei, YANG Ruiguang. On the stability of linear active disturbance rejection control[J]. Acta Automatica Sinica, 2013, 39(5): 574-580.
doi: 10.3724/SP.J.1004.2013.00574 URL |
|
| [8] | 吴丹, 赵彤, 陈恳. 快速刀具伺服系统自抗扰控制的研究与实践[J]. 控制理论与应用, 2013, 30(12): 1534-1542. |
| WU Dan, ZHAO Tong, CHEN Ken. Research and industrial applications of active disturbance rejection control to fast tool servos[J]. Control Theory & Applications, 2013, 30(12): 1534-1542. | |
| [9] |
WU D, CHEN K. Frequency-domain analysis of nonlinear active disturbance rejection control via the describing function method[J]. IEEE Transactions on Industrial Electronics, 2013, 60(9): 3906-3914.
doi: 10.1109/TIE.2012.2203777 URL |
| [10] | 邵星灵, 王宏伦. 线性扩张状态观测器及其高阶形式的性能分析[J]. 控制与决策, 2015, 30(5): 815-822. |
| SHAO Xingling, WANG Honglun. Performance analysis on linear extended state observer and its extension case with higher extended order[J]. Control and Decision, 2015, 30(5): 815-822. | |
| [11] | 周涛. 基于反双曲正弦函数的自抗扰控制器[J]. 上海交通大学学报, 2015, 49(8): 1186-1190. |
| ZHOU Tao. An active disturbance rejection controller based on inverse hyperbolic sine function[J]. Journal of Shanghai Jiao Tong University, 2015, 49(8): 1186-1190. | |
| [12] |
SUN L, LI D H, HU K T, et al. On tuning and practical implementation of active disturbance rejection controller: A case study from a regenerative heater in a 1000 MW power plant[J]. Industrial & Engineering Chemistry Research, 2016, 55(23): 6686-6695.
doi: 10.1021/acs.iecr.6b01249 URL |
| [13] | 张铁, 吴圣和, 蔡超. 基于浮动平台的机器人恒力控制研磨方法[J]. 上海交通大学学报, 2020, 54(5): 515-523. |
| ZHANG Tie, WU Shenghe, CAI Chao. Constant force control method for robotic disk grinding based on floating platform[J]. Journal of Shanghai Jiao Tong University, 2020, 54(5): 515-523. | |
| [14] | 郭金龙, 姜淑华. 基于FOADRC的四旋翼无人机姿态控制研究[J]. 长春理工大学学报(自然科学版), 2021, 44(4): 71-76. |
| GUO Jinlong, JIANG Shuhua. Research on attitude control of quadrotor UAV based on FOADRC[J]. Journal of Changchun University of Science and Technology (Natural Science Edition), 2021, 44(4): 71-76. | |
| [15] | LI J, XIA Y Q, QI X H, et al. On the necessity, scheme, and basis of the linear-nonlinear switching in active disturbance rejection control[J]. IEEE Tran-sactions on Industrial Electronics, 2017, 64(2): 1425-1435. |
| [16] | 李杰, 齐晓慧, 夏元清, 等. 线性/非线性自抗扰切换控制方法研究[J]. 自动化学报, 2016, 42(2): 202-212. |
| LI Jie, QI Xiaohui, XIA Yuanqing, et al. On linear/nonlinear active disturbance rejection switching control[J]. Acta Automatica Sinica, 2016, 42(2): 202-212. | |
| [17] |
刘福才, 王立新, 贾晓菁, 等. 线性/非线性自抗扰切换控制在变载荷气动加载系统中的应用[J]. 机械工程学报, 2018, 54(12): 225-232.
doi: 10.3901/JME.2018.12.225 |
|
LIU Fucai, WANG Lixin, JIA Xiaojing, et al. Application of linear/nonlinear active disturbance rejection switching control in variable load pneumatic loading system[J]. Journal of Mechanical Engineering, 2018, 54(12): 225-232.
doi: 10.3901/JME.2018.12.225 |
|
| [18] | 朱熀秋, 赵泽龙. 三自由度六极混合磁轴承线性/非线性自抗扰切换解耦控制[J]. 中国电机工程学报, 2018, 38(10): 3077-3086. |
| ZHU Huangqiu, ZHAO Zelong. Decoupling control based on linear/nonlinear active disturbance rejection switching for 3-degree-of-freedom 6-pole hybrid magnetic bearing[J]. Proceedings of the CSEE, 2018, 38(10): 3077-3086. | |
| [19] | 郭杰, 刘轶华, 马利华. 基于多模态快速非奇异终端滑模的船舶航迹跟踪自抗扰控制[J]. 中国航海, 2020, 43(2): 7-13. |
| GUO Jie, LIU Yihua, MA Lihua. Active disturbance rejection control for ship trajectory tracking with multimodal fast nonsingular terminal sliding mode strategy[J]. Navigation of China, 2020, 43(2): 7-13. | |
| [20] | YANG F F, GUO C, WANG P. Switching active disturbance rejection controller for a ship dynamic positioning system[C]∥2018 13th World Congress on Intelligent Control and Automation. Changsha, China: IEEE, 2018: 455-460. |
| [21] | ZHAO J W, ZHANG H L, LI X K. Active disturbance rejection switching control of quadrotor based on robust differentiator[J]. Systems Science & Control Engineering, 2020, 8(1): 605-617. |
| [22] |
吴正平, 邓聪, 文海. 模糊线性/非线性自抗扰切换控制及其应用[J]. 航空学报, 2021, 42(9): 324710.
doi: 10.7527/S1000-6893.2020.24710 |
|
WU Zhengping, DENG Cong, WEN Hai. Fuzzy linear/nonlinear active disturbance rejection switching control and its application[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(9): 324710.
doi: 10.7527/S1000-6893.2020.24710 |
|
| [23] |
万慧, 齐晓慧. 线性/非线性切换扩张状态观测器的收敛性和稳定性分析[J]. 信息与控制, 2020, 49(2): 163-169.
doi: 10.13976/j.cnki.xk.2020.9073 |
|
WAN Hui, QI Xiaohui. Convergence and stability analysis of linear/nonlinear switching extended state observer[J]. Information and Control, 2020, 49(2): 163-169.
doi: 10.13976/j.cnki.xk.2020.9073 |
|
| [24] | 朱士鹏. 基于LMI的区间Lurie控制系统鲁棒绝对稳定性分析方法[D]. 长沙: 中南大学, 2005. |
| ZHU Shipeng. LMI based robust absolute stability analysis method for interval Lurie control system[D]. Changsha: Central South University, 2005. |
| [1] | HOU Jue, YAO Dongwei, WU Feng, LÜ Chenglei, WANG Han, SHEN Junhao. Control Strategy for Electric Vehicle Range-Extender Based on Hybrid Excitation Generator [J]. Journal of Shanghai Jiao Tong University, 2021, 55(2): 206-212. |
| [2] | CHANG Lu, SHAN Liang, LI Jun, DAI Yuewei . Sliding Mode Control of T-Shaped Pedestrian Channel [J]. Journal of Shanghai Jiao Tong University(Science), 2020, 25(4): 478-485. |
| [3] |
JIANG Xiaoming, WANG Xufeng, ZHANG Weifang, LIU Yigang.
Coarse-fine Compound Axis Cooperative Control Strategy Optimization for Laser Tracking & Aiming System
[J]. Air & Space Defense, 2019, 2(3): 31-37.
|
| [4] | YANG Xu, CHEN Guo-long, DOU Hong-bo, DONG De-long, TANG Pi-xin. Stability Parameters Analysis of Conversion of Old Semi-Submersible Platform [J]. Ocean Engineering Equipment and Technology, 2018, 5(增刊): 253-258. |
| [5] | Xuefeng MAI. The Design and Realization of the Intelligent Decoupling Control Experiment for the Process Control Experimental Device [J]. Research and Exploration in Laboratory, 2017, 36(5): 139-143. |
| [6] | ZHEN Lianga (甑亮), CHEN Jinjiana* (陈锦剑),. Effect of Orthogonal Stiffeners on the Stability of Axially Compressed Steel Jacking Pipe [J]. Journal of shanghai Jiaotong University (Science), 2017, 22(5): 536-540. |
| [7] | DU Xiao-xu1* (杜晓旭), LI Xin-liang1 (李新亮), HAO Cheng-zhi2 (郝承智), WANG You-jiang1 (王有江). Stability Analysis of Two-Point Mooring Autonomous Underwater Vehicle [J]. Journal of shanghai Jiaotong University (Science), 2015, 20(5): 618-624. |
| [8] | ZHANG Ningyun,TANG Houjun,YAO Chen. Active Damping Control of Single-Phase Grid-Connected Photovoltaic Inverter Based on Filter [J]. Journal of Shanghai Jiaotong University, 2015, 49(04): 429-435. |
| [9] | LIU Shi-1, DING Ming-1, 2 , LIU Wei-1, LUO Han-Wen-1. Greedy Antenna Selection Algorithm for MIMO Relay System [J]. Journal of Shanghai Jiaotong University, 2011, 45(07): 1054-1057. |
| Viewed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
Full text 670
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
Abstract 836
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||