Journal of Shanghai Jiao Tong University ›› 2023, Vol. 57 ›› Issue (5): 601-612.doi: 10.16183/j.cnki.jsjtu.2021.342
Special Issue: 《上海交通大学学报》2023年“电子信息与电气工程”专题
• Electronic Information and Electrical Engineering • Previous Articles Next Articles
SONG Chuanming, DU Qinjun( ), LI Cunhe, LUO Yonggang
), LI Cunhe, LUO Yonggang
Received:2021-09-10
Revised:2022-10-28
Accepted:2021-12-08
Online:2023-05-28
Published:2023-06-02
Contact:
DU Qinjun
E-mail:duqinjun@sdut.edu.cn.
CLC Number:
SONG Chuanming, DU Qinjun, LI Cunhe, LUO Yonggang. Coupling Modeling of Humanoid Flexible Joint and Vibration Suppression at Variable Load[J]. Journal of Shanghai Jiao Tong University, 2023, 57(5): 601-612.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2021.342
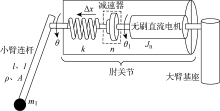
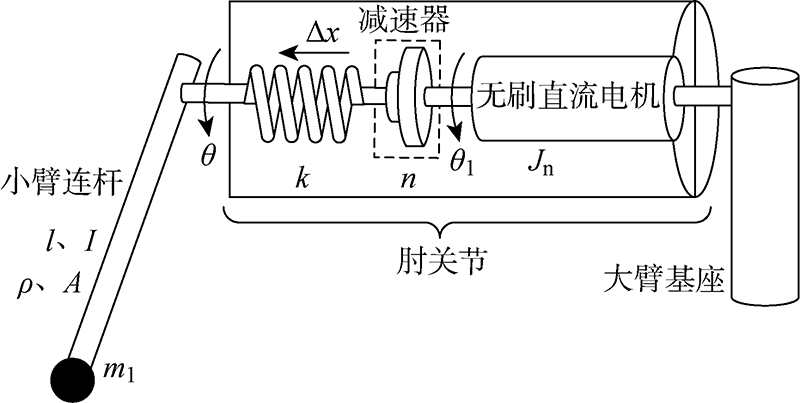
Fig.1
Physical model of elbow joint of humanoid flexible joint robotic arm
Tab.1
Definition of generalized coordinates
| 广义坐 标与广 义力 标识 | 电磁部分 | 机械传动部分 | |||||
|---|---|---|---|---|---|---|---|
| 定子 | 转子 | 电机 转角 j=4 | 手臂 转角 j=5 | ||||
| j=1 | j=2 | j=3 | |||||
| Aj | qa | qb | qc | ψr | θ1 | θ | |
| ia | ib | ic | — | ||||
| F1 | F2 | F3 | — | F4 | F5 | ||
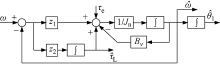
Fig.2
Structure of state observer
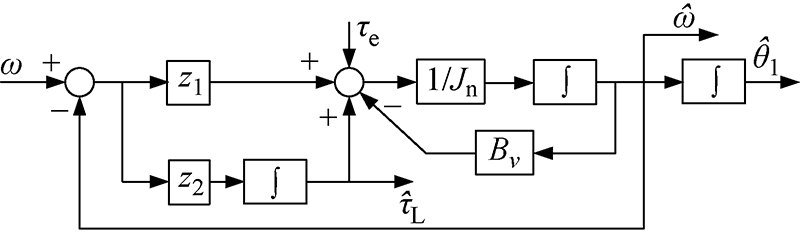

Fig.3
Structure of PI-IP controller


Fig.4
Equivalent structure of PI-IP controller

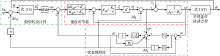
Fig.5
Control block diagram of joint drive system

Tab.2
System parameters of flexible joint drive system
| 参数 | 设定值 |
|---|---|
| 驱动电机额定电压/V | 12 |
| 驱动电机额定转速/(r·min-1) | 1200 |
| 电枢绕组等效电感/mH | 1.4 |
| 电枢绕组等效电阻/Ω | 24 |
| 转子转动惯量/(kg·m2) | 0.062 |
| 手臂转动惯量/(kg·m2) | 0.45 |
| 电机电磁阻尼系数/(N·m·s·rad-1) | 0.2 |
| 关节机械阻尼系数/(N·m·s·rad-1) | 0.5 |
| 关节刚度系数/(N·m·rad-1) | 10 |
| 减速器减速比 | 100∶1 |

Fig.6
Observed value and observation error of disturbance torque
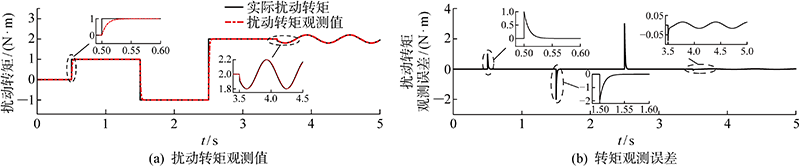

Fig.7
Observed value and observation error of motor speed


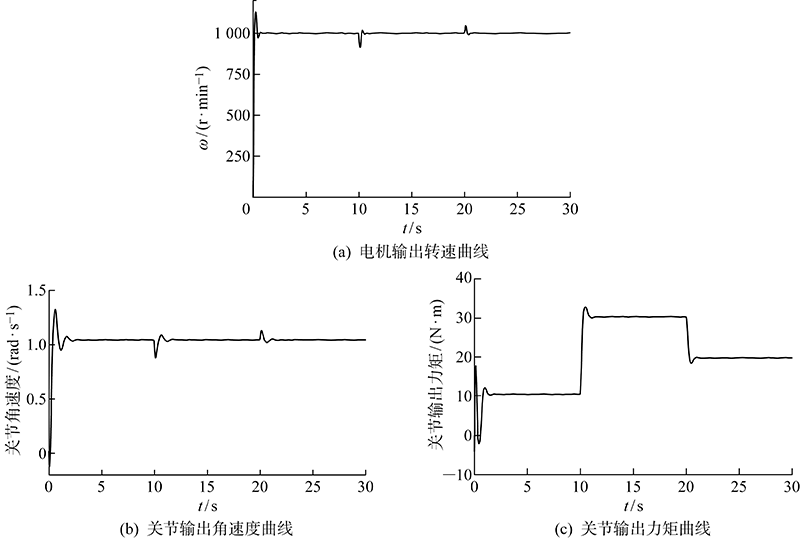
Fig.8
Output curve of drive motor

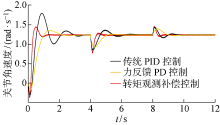
Fig.9
Curve of joint angular velocity
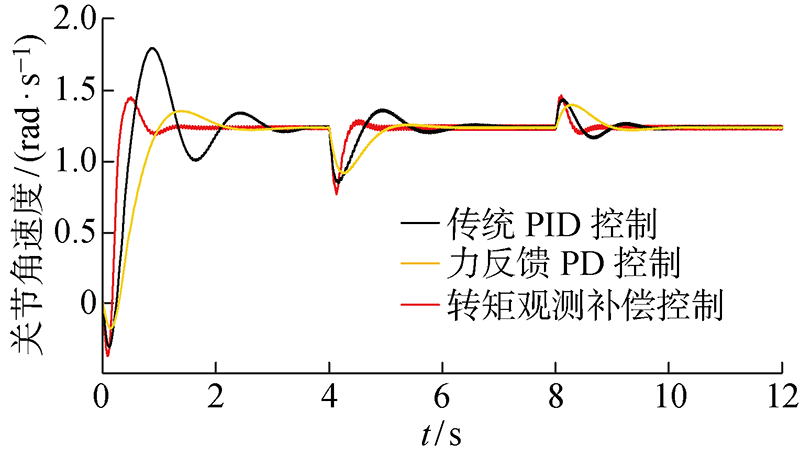

Fig.10
Site of experimental equipment
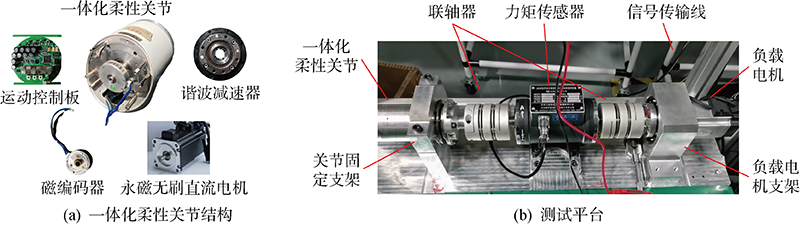

Fig.11
Schematic diagram of experimental platform
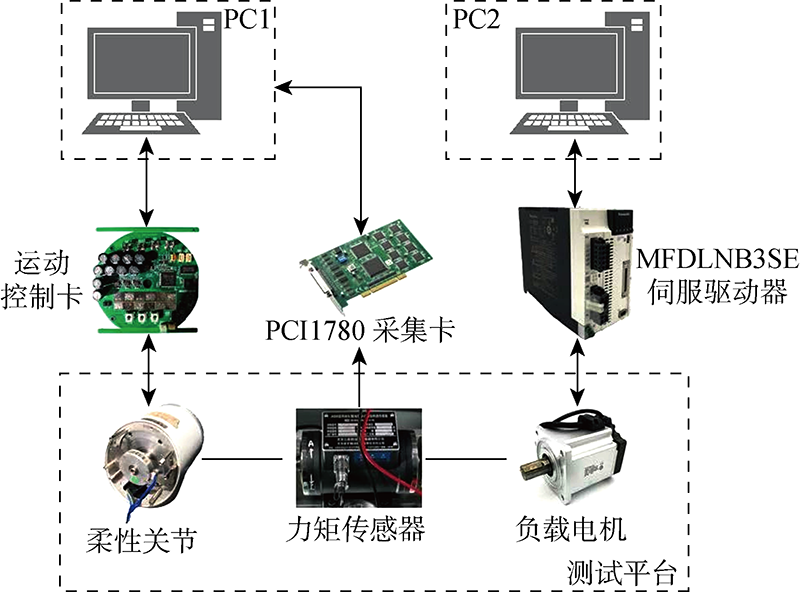

Fig.12
Experimental results of torque compensation control method at variation in load torque
| [1] | ASFOUR T, KAUL L, WÄCHTER M, et al. ARMAR-6: A collaborative humanoid robot for industrial environments[C]//2018 IEEE-RAS 18th International Conference on Humanoid Robots. Beijing, China: IEEE, 2018: 447-454. |
| [2] |
JIANG Z H, XU J F, LI H, et al. Stable parking control of a robot astronaut in a space station based on human dynamics[J]. IEEE Transactions on Robotics, 2020, 36(2): 399-413.
doi: 10.1109/TRO.8860 URL |
| [3] | ITO K, IWASAKI M. State feedback-based vibration suppression for multi-axis industrial robot with posture change[C]//IECON 2016-42nd Annual Conference of the IEEE Industrial Electronics Society. Florence, Italy: IEEE, 2016: 5119-5124. |
| [4] | GUO C Q, GAO H B, NI F L, et al. A vibration suppression method for flexible joints manipulator based on trajectory optimization[C]//2016 IEEE International Conference on Mechatronics and Automation. Harbin, China: IEEE, 2016: 338-343. |
| [5] |
SPONG M W. Modeling and control of elastic joint robots[J]. Journal of Dynamic Systems, Measurement, and Control, 1987, 109(4): 310-318.
doi: 10.1115/1.3143860 URL |
| [6] |
BRIDGES M M, DAWSON D M. Redesign of robust controllers for rigid-link flexible-joint robotic manipulators actuated with harmonic drive gearing[J]. IEE Proceedings-Control Theory and Applications, 1995, 142(5): 508-514.
doi: 10.1049/ip-cta:19951970 URL |
| [7] |
LI D G, ZU J W, GOLDENBERG A A. Dynamic modeling and mode analysis of flexible-link, flexible-joint robots[J]. Mechanism and Machine Theory, 1998, 33(7): 1031-1044.
doi: 10.1016/S0094-114X(97)00054-2 URL |
| [8] | MAITI T K, OCHI Y, MIURA-MATTAUSCH M, et al. Modeling of multi-dimensional system and its application for robot development[C]//2018 International Symposium on Devices, Circuits and Systems. Howrah, India: IEEE, 2018: 1-4. |
| [9] | JI P, LI S, XU M J, et al. Design of sliding cloud-model cross coupling controller for tracked mobile robot[C]//2018 37th Chinese Control Conference. Wuhan, China: IEEE, 2018: 5353-5357. |
| [10] | 娄军强. 基于压电致动器的空间柔性机械臂系统的轨迹跟踪与振动抑制一体化控制研究[D]. 杭州: 浙江大学, 2013. |
| LOU Junqiang. Research on integrated control of trajectory tracking and vibration suppression of a space flexible manipulator system using piezoelectric actuators[D]. Hangzhou: Zhejiang University, 2013. | |
| [11] | 鞠锦勇. 移动柔性操作臂系统机电耦合动力学特性及振动控制研究[D]. 徐州: 中国矿业大学, 2018. |
| JU Jinyong. Research on electromechanical-coupling dynamic and vibration control of the translational flexible manipulator system[D]. Xuzhou: China University of Mining and Technology, 2018. | |
| [12] | WU Y S, LAN C C. Design of a linear variable-stiffness mechanism using preloaded bistable beams[C]//2014 IEEE/ASME International Conference on Advanced Intelligent Mechatronics. Besacon, France: IEEE, 2014: 605-610. |
| [13] | 郭闯强, 倪风雷, 孙敬颋, 等. 具有力矩传感器的柔性关节的振动抑制[J]. 机器人, 2011, 33(4): 449-454. |
| GUO Chuangqiang, NI Fenglei, SUN Jingting, et al. Vibration suppression for the flexible joint with torque sensor[J]. Robot, 2011, 33(4): 449-454. | |
| [14] |
LIU L, LEONHARDT S, NGO C, et al. Impedance-controlled variable stiffness actuator for lower limb robot applications[J]. IEEE Transactions on Automation Science and Engineering, 2020, 17(2): 991-1004.
doi: 10.1109/TASE.8856 URL |
| [15] | YOO S, CHUNG W K. Link motion feedback based force/torque servo control of robot joint with series elasticity[C]//2015 12th International Conference on Ubiquitous Robots and Ambient Intelligence. Goyangi, Korea (South): IEEE, 2015: 133-134. |
| [16] | KELLY R, MONROY C. On robustness of PD control with gravity compensation of torque-driven robot manipulators[C]// 2019 International Conference on Control, Automation and Diagnosis. Grenoble, France: IEEE, 2019: 1-5. |
| [17] | GUPTA V, BENDAPUDI N, KAR I N, et al. Three-stage computed-torque controller for trajectory tracking in non-holonomic wheeled mobile robot [C]//2018 IEEE 15th International Workshop on Advanced Motion Control. Tokyo, Japan: IEEE, 2018: 144-149. |
| [18] | CHEN C J, YEH S S. Torque-compensated motion control design for a mobile robot moving on ground with ill-conditioned road situations[C]//2016 2nd International Conference on Control, Automation and Robotics. Hong Kong, China: IEEE, 2016: 38-43. |
| [19] | SONG Y Y, XIAO X, XU W Z. Sensorless collision detection for robots based on load torque observer[C]//2019 22nd International Conference on Electrical Machines and Systems. Harbin, China: IEEE, 2019: 1-5. |
| [20] |
CUI R X, CHEN L P, YANG C G, et al. Extended state observer-based integral sliding mode control for an underwater robot with unknown disturbances and uncertain nonlinearities[J]. IEEE Transactions on Industrial Electronics, 2017, 64(8): 6785-6795.
doi: 10.1109/TIE.41 URL |
| [21] | YABUKI A, OHISHI K, MIYAZAKI T, et al. Design method of I-PD force control system based on instantaneous state observer for industrial robot[C]// 2016 IEEE 14th International Workshop on Advanced Motion Control. Auckland, New Zealand: IEEE, 2016: 91-96. |
| [22] | 王漪梦, 吴斌, 周挺. 基于干扰观测器的空间机械臂柔性关节振动抑制[J]. 自动化与仪器仪表, 2019(3): 147-150. |
| WANG Yimeng, WU Bin, ZHOU Ting. Vibration suppression for the space manipulator flexible joint based on disturbance observer[J]. Automation & Instrumentation, 2019(3): 147-150. | |
| [23] | CHENG W L, ZHANG Z C, WU Y Q. Disturbance-observer-based tracking control for a flexible-joint robotic manipulator with external disturbance[C]// 2020 Chinese Control and Decision Conference. Hefei, China: IEEE 2020: 3406-3409. |
| [24] |
JU J Y, LI W, YANG X F, et al. Electromechanical coupling vibration characteristics of an AC servomotor-driven translational flexible manipulator[J]. International Journal of Advanced Robotic Systems, 2016, 13(6): 1-10.
doi: 10.5772/62058 URL |
| [25] | 苏承基. 电机传动系统控制[M]. 张永昌,李正熙等, 译. 北京: 机械工业出版社, 2013. |
| SU S K. Control of electric machine drive systems[M]. ZHANG Yongchang, LI Zhengxi, et al. Beijing: China Machine Press, 2013. | |
| [26] | 左月飞. 永磁同步电机伺服系统的转速控制策略研究[D]. 南京: 南京航空航天大学, 2016. |
| ZUO Yuefei. Research on speed controller for PMSM servo system[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2016. |
| [1] | Chen Qiuzhuo, Zhu Biao, Ma Lixiang, Liu Bingyou, Wan Luanfei. Underactuated System Control Based on Improved Active Disturbance Rejection Control [J]. J Shanghai Jiaotong Univ Sci, 2026, 31(2): 428-439. |
| [2] | LI Conglin, HUANG Jinfeng, ZHANG Qian, CHEN Xu. Improved Sliding Mode Active Disturbance Rejection Control for SIDO Buck Converter Based on High-Order Filtering Super-Twisting ESO [J]. Journal of Shanghai Jiao Tong University, 2026, 60(1): 87-99. |
| [3] | HUANG JinFeng, ZHANG Qian. Cascade Sliding Mode Decoupling Control of Coupled Inductor Single-Input Dual-Output Buck Converter Based on Super-Twisting Extend State Observer [J]. Journal of Shanghai Jiao Tong University, 2025, 59(5): 592-604. |
| [4] | WANG Xianzhi, LI Guofei, CHANG Ya’nan. Distributed Extended State Observer-Based Formation Control of Multiple Flight Vehicles [J]. Journal of Shanghai Jiao Tong University, 2024, 58(11): 1798-1804. |
| [5] | WEI Guangyu, GU Chaochen, YANG Shusheng, GUAN Xinping. Decoupling and Synchronization Control of Asymmetric Flexure-Linked Dual-Drive Gantry Stage [J]. Journal of Shanghai Jiao Tong University, 2023, 57(5): 593-600. |
| [6] | JIANG Kun, CAI Qingqing, LI Sunwei. Research on Vibration Suppression of New Barge Floating Wind Turbine by TMD in the Platform [J]. Ocean Engineering Equipment and Technology, 2023, 10(4): 122-129. |
| [7] | LYU Shuo, ZHANG Qingzhen, GUO Yunhe, FENG Shuo. Attitude Control of Missile with Deflectable Nose Based on Backstepping Sliding Mode Control [J]. Air & Space Defense, 2022, 5(4): 30-37. |
| [8] | XIA Guoqing, LIU Caiyun, CHEN Xinghua. Finite-Time Observer Design for Dynamic Positioning Assisted Mooring Positioning Ship [J]. Journal of Shanghai Jiaotong University, 2020, 54(8): 849-855. |
| [9] | ZHENG Tianhai, FENG Zhengping, ZHAO Shuo, PAN Wanjun. Active Disturbance Rejection Controller Based Heading Control of Underwater Flight Vehicles [J]. Journal of Shanghai Jiao Tong University(Science), 2020, 25(4): 441-446. |
| [10] | JIN Yihuan, LIU Lu, PENG Yiyang, CHENG Li, ZHENG Ziyuan. Attitude Control with Direct Force Based on Hybrid Bang-Bang Control [J]. Air & Space Defense, 2020, 3(3): 111-117. |
| [11] | WAN Hang, XU Shengli, ZHANG Qingzhen, ZHANG Di. Dynamic InversionBased Attitude Control of Aerospace Morphing Vehicle [J]. Air & Space Defense, 2019, 2(4): 25-31. |
| [12] | ZHAO Leilei,YU Yuewei,ZHOU Changcheng,YANG Fuxing. Analysis and Suppression of Rehabilitation Robotic Wheelchair Vibrations Under Random Road Excitations [J]. Journal of Shanghai Jiaotong University, 2019, 53(12): 1502-1507. |
| [13] | WANG Guangwen,YAO Jianyong. Output Feedback Control of Electro-Hydraulic Servo Systems with Command Filter [J]. Journal of Shanghai Jiaotong University, 2019, 53(12): 1482-1487. |
| [14] |
HOU Xiaoweia,TANG Zhaoquanb,SUN Xubin,CAI Hu,ZHANG Mengyanga,DONG Haironga.
ARMBased Simulation Test System for Train Control Algorithms [J]. Journal of Shanghai Jiao Tong University, 2017, 51(6): 741-747. |
| [15] | QI Xiaohui1,WANG Jianchen2. Subspace Model Identification Method for Flight Dynamics of FixedWing Airplane [J]. Journal of Shanghai Jiaotong University, 2016, 50(04): 613-618. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||