Journal of Shanghai Jiao Tong University ›› 2021, Vol. 55 ›› Issue (1): 40-47.doi: 10.16183/j.cnki.jsjtu.2019.104
Special Issue: 《上海交通大学学报》2021年12期专题汇总专辑; 《上海交通大学学报》2021年“交通运输工程”专题
Previous Articles Next Articles
ZHANG Xianku( ), HAN Xu
), HAN Xu
Received:2019-04-16
Online:2021-01-01
Published:2021-01-19
CLC Number:
ZHANG Xianku, HAN Xu. Modeling and Sliding Mode Control for Chaotic Yawing Phenomenon of Large Oil Tanker[J]. Journal of Shanghai Jiao Tong University, 2021, 55(1): 40-47.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2019.104
Tab.1
Ship parameter of large oil tanker Davis Sea
| 参数 | 取值 | 参数 | 取值 |
|---|---|---|---|
| 两柱间长/m | 234 | 重心距中心距离/m | 8.536 |
| 船宽/m | 42 | 航速/kn | 14.8 |
| 吃水/m | 14.9 | 舵叶面积/m2 | 65.04 |
| 方形系数 | 0.817 | 排水量/m3 | 122 945 |
| K | 0.07 | T3 | 28.43 |
| T1 | 179.4 | α | 26.59 |
| T2 | 12.17 | β | 152 406.7 |
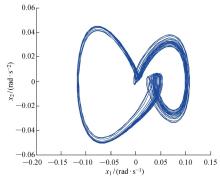
Fig.1
System phase
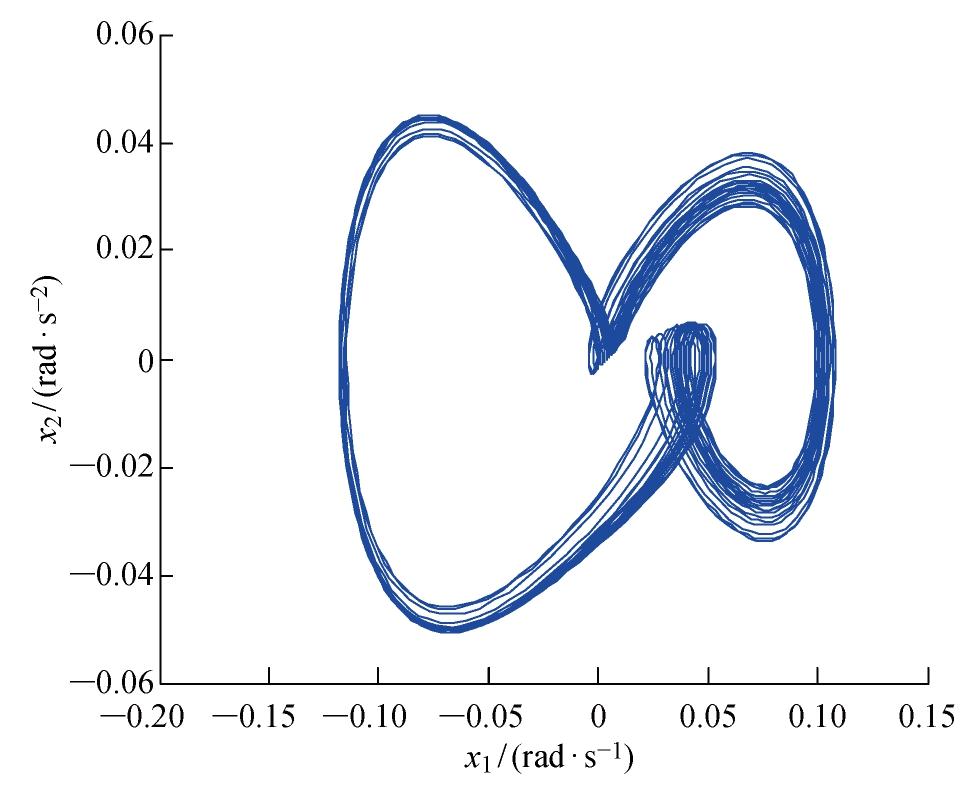

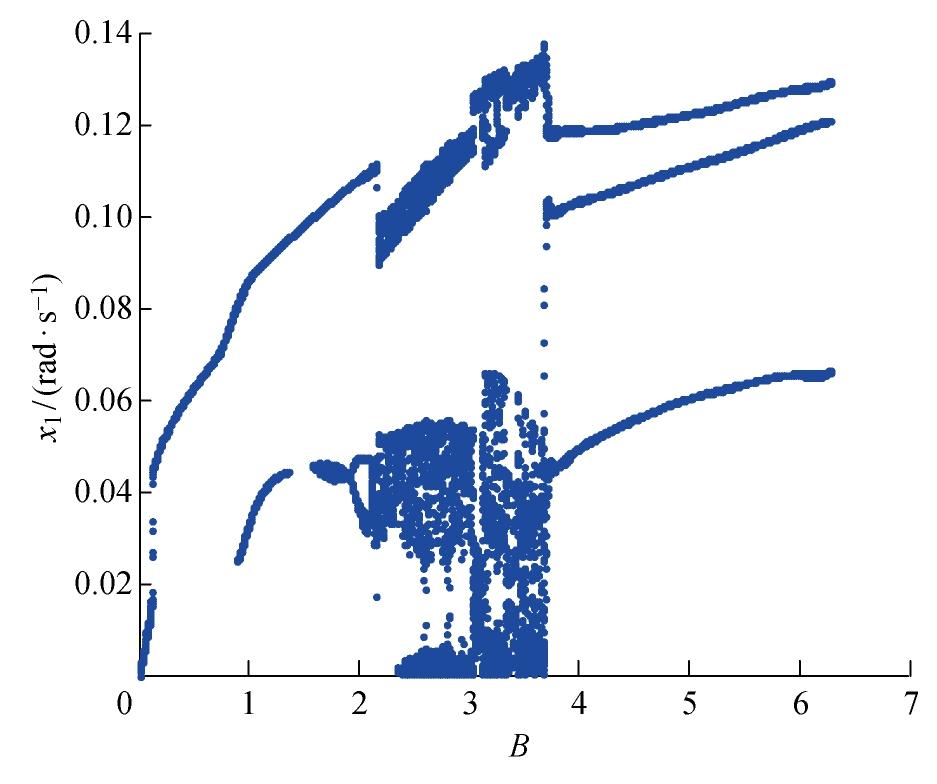
Fig.2
Bifurcation diagram atB=0—2π
Tab.2
Correspondence between Lyapunov exponent and system stability in 3-dimensional systems
| (λ1,λ2,λ3) | 系统稳定性 |
|---|---|
| (-,-,-) | 稳定不动点 |
| (0,-,-) | 极限环 |
| (0, 0,-) | 二维环面 |
| (+,+,0) | 不稳极限环 |
| (+,0, 0) | 不稳二维环面 |
| (+,0,-) | 混沌吸引子 |
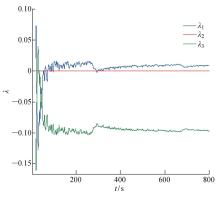
Fig.3
Lyapunov exponents of system
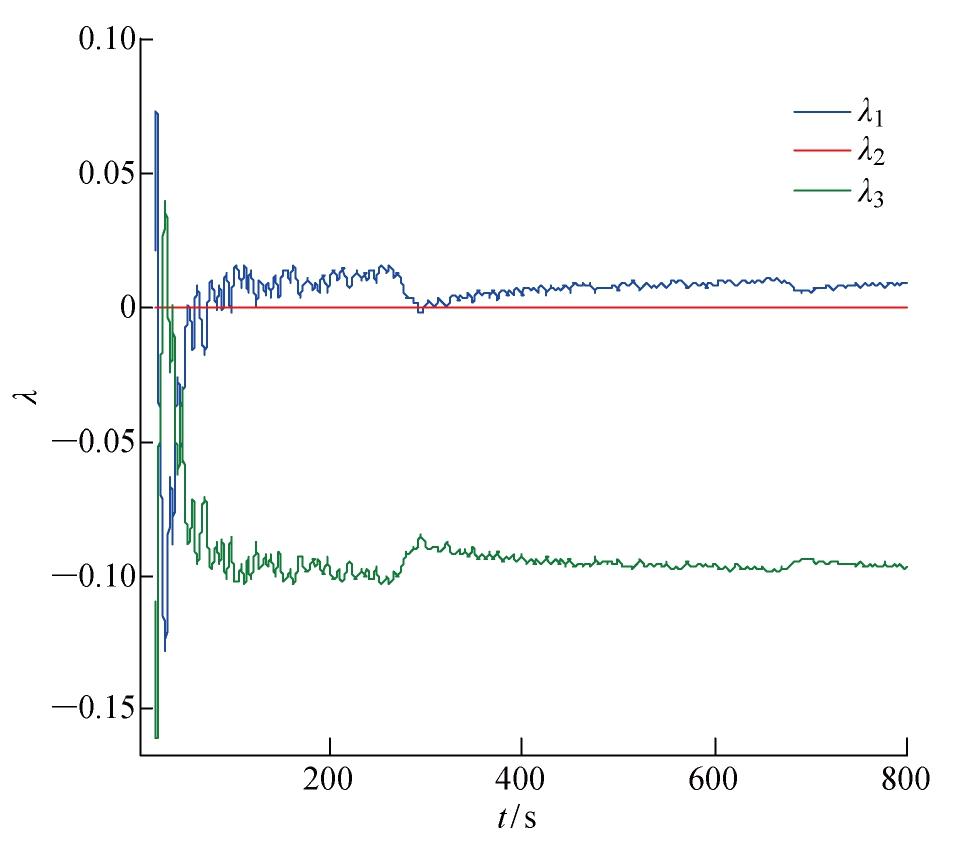
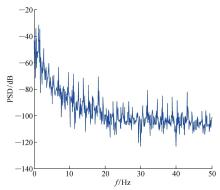
Fig.4
Power spectrum of system
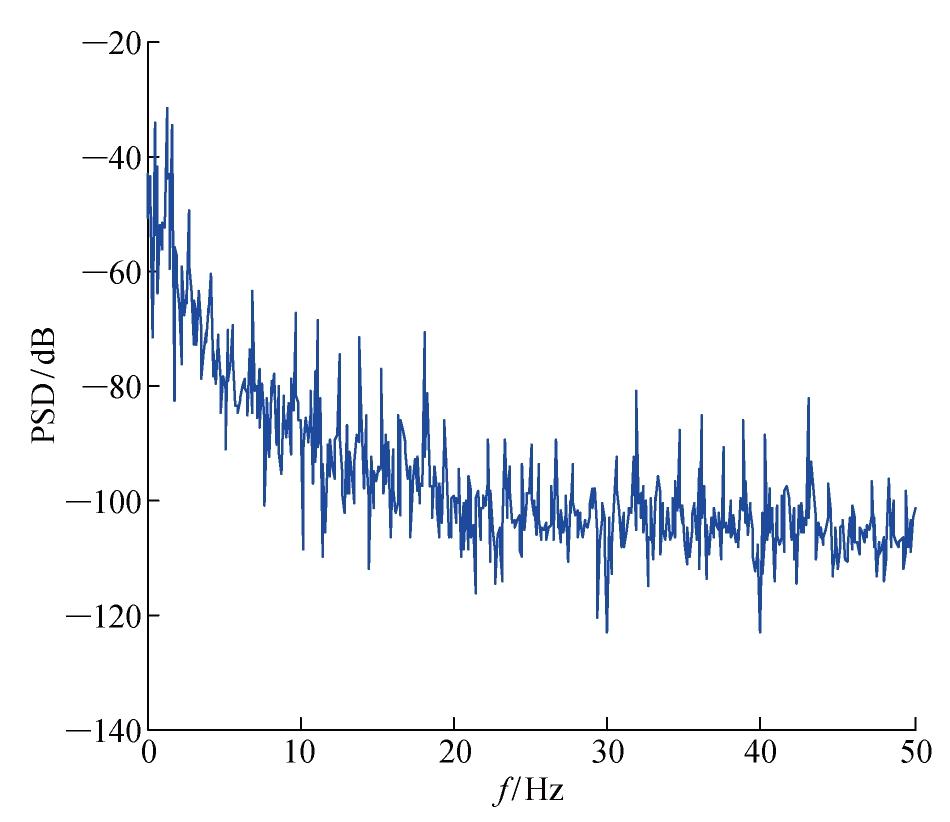
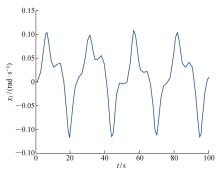
Fig.5
Time curve of state variablex1
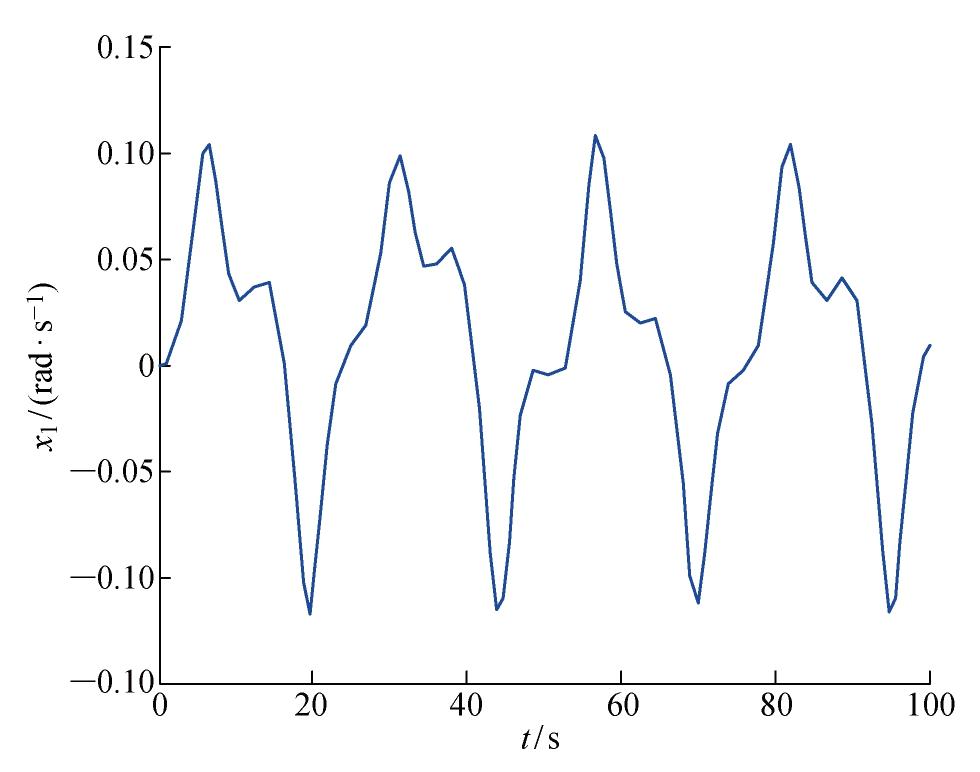
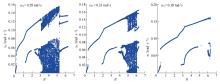
Fig.6
System bifurcation at different angular frequencies
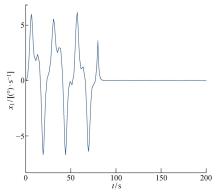
Fig.7
Turning rate before and after control
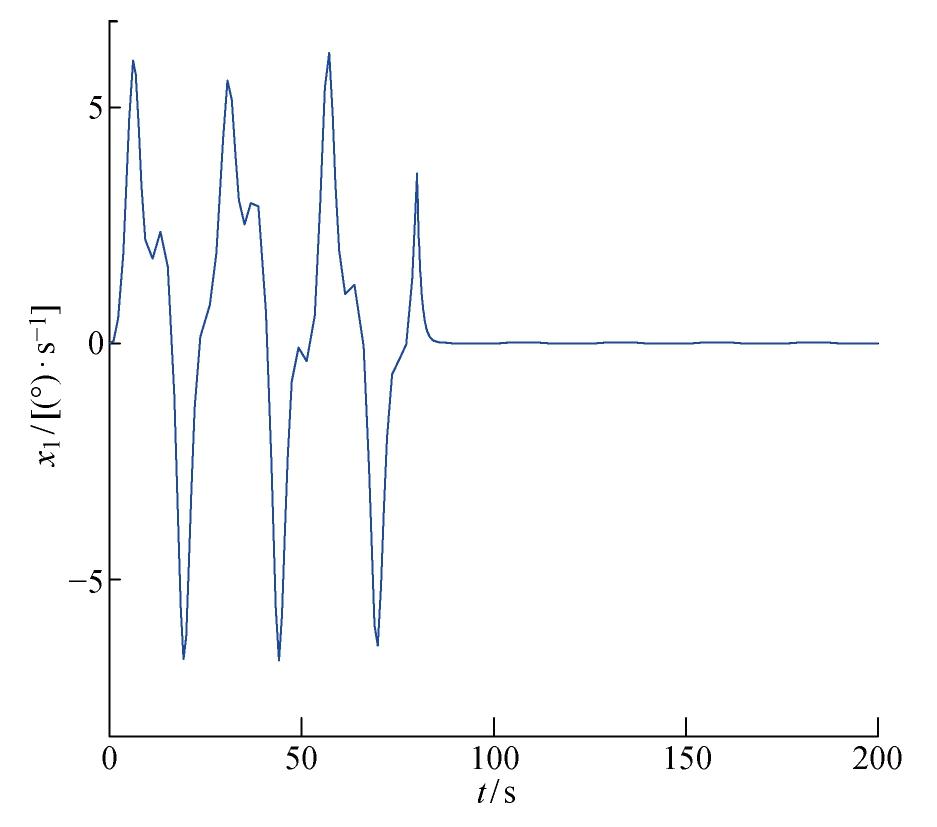
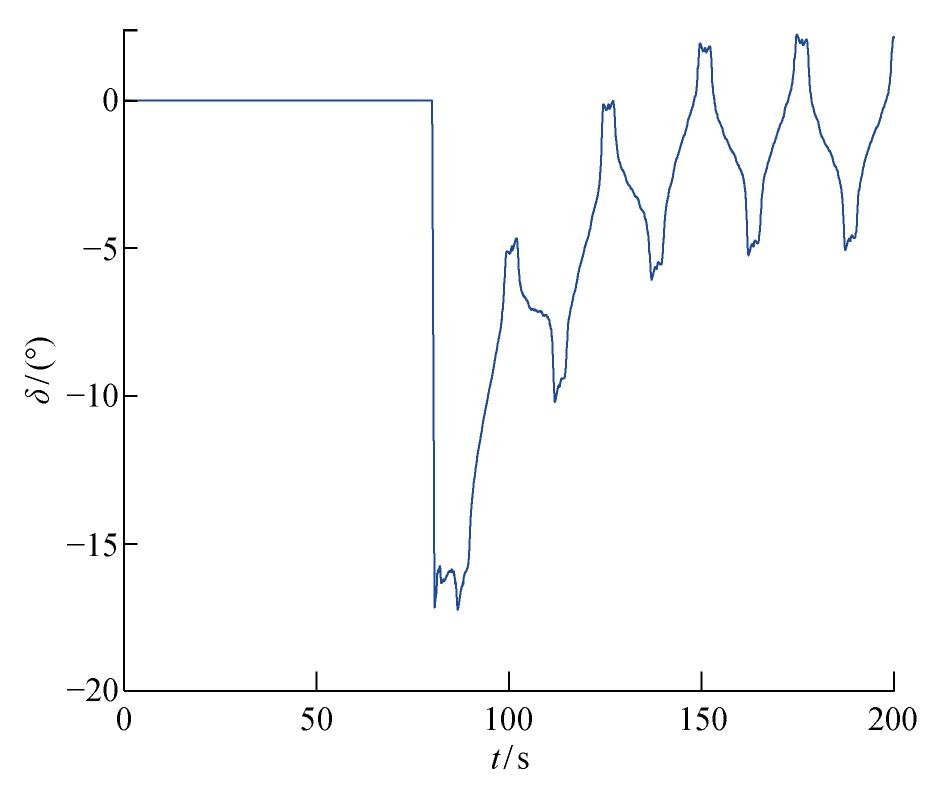
Fig.8
Controlling rudder angle
| [1] | LIU Y, HU A, HAN F, et al. Numerical method research on nonlinear roll system of large container ship[C]∥34th International Conference on Ocean, Offshore and Arctic Engineering (ASME 2015). New York: The American Society of Mechanical Engineers, 2015: 2-22. |
| [2] | SPYROU K J, THOMPSON J M T. The nonlinear dynamics of ship motions: A field overview and some recent developments[J]. Philosophical Transactions Mathematical Physical & Engineering Sciences, 2000, 358(1771): 1735-1760. |
| [3] | SPYROU K J, THEMELIS N, KONTOLEFAS I. Nonlinear surge motions of a ship in bi-chromatic following waves[J]. Communications in Nonlinear Science & Numerical Simulations, 2018, 56: 296-313. |
| [4] | KONTOLEFAS I, SPYROU K J. Coherent structures in phase space, governing the nonlinear surge motions of ships in steep waves[J]. Ocean Engineering, 2016, 120: 339-345. |
| [5] | 苏宁.混沌学与船舶控制应用[D]. 大连: 大连海事大学,1996. |
| SU Ning. Chaos and ship motion control[D]. Dalian: Dalian Maritime University, 1996. | |
| [6] | 朱璐.船舶航向保持中的混沌及鲁棒控制[D]. 大连: 大连海事大学,2009. |
| ZHU Lu. Chaos in the course keeping control of ships and robust control method[D]. Dalian: Dalian Maritime University, 2009. | |
| [7] | 毕宁宁.参数不确定Liu混沌系统的鲁棒控制[D].大连: 大连海事大学,2009. |
| BI Ningning. Robust control of parameter uncertain Liu chaotic system[D]. Dalian: Dalian Maritime University, 2009. | |
| [8] | 于黎明,王占林,裘丽华.人机控制与驾驶员模型研究[J]. 电光与控制,2000(1): 1-8. |
| YU Liming, WANG Zhanlin, QIU Lihua. The study on pilot/flight control system and pilot model[J]. Electronics Optics & Control, 2000(1): 1-8. | |
| [9] | 蒋维安. 多维比例微分非线性飞行员模型及仿真应用[J]. 系统仿真学报,2018, 30(10): 100-107. |
| JIANG Weian. Multi-dimension proportion-differential nonlinear pilot model and simulation application[J]. Journal of System Simulation, 2018, 30(10): 100-107. | |
| [10] | YUCELEN T, YILDIZ Y, SIPAHI R, et al. Stability limit of human-in-the-loop model reference adaptive control architectures[J]. International Journal of Control, 2017, 91(10): 1-36. |
| [11] | 黄谦,李天伟,王书晓,等. 舰船混沌运动的单输入自适应变结构控制[J]. 动力学与控制学报,2015, 13(6): 443-448. |
| HUANG Qian, LI Tianwei, WANG Shuxiao, et al. Chaos control of ship steering via single input adaptive sliding mode control method[J]. Journal of Dynamics and Control, 2015, 13(6): 443-448. | |
| [12] | LI T, HUANG Q, GUO J, et al. A valid adaptive sliding mode control method for chaotic ship steering[C]∥Control & Decision Conference. New York: IEEE, 2015: 3221-3224. |
| [13] | ZHANG X, YANG G, ZHANG Q, et al. Improved concise backstepping control of course keeping for ships using nonlinear feedback technique[J]. Journal of Navigation, 2017, 70(6): 1401-1414. |
| [14] | 刘金琨. 滑模变结构控制MATLAB仿真[M]. 第3版. 北京: 清华大学出版社,2015: 4-10. |
| LIU Jinkun. Sliding mode control design and MATLAB simulation[M]. 3rd ed. Beijing: Tsinghua University Press, 2015: 4-10. | |
| [15] | 张显库,金一丞. 控制系统建模与数字仿真[M]. 第2版. 大连: 大连海事大学出版社,2013: 108-145. |
| ZHANG Xianku, JIN Yicheng. Control system modeling and digital simulation[M]. 2nd ed. Dalian: Dalian Maritime University Press, 2013: 108-145. | |
| [16] | MCCUE L S, TROESCH A W. Use of Lyapunov exponents to predict chaotic vessel motions[J]. Fluid Mechanics and Its Applications, 2011, 97: 415-432. |
| [17] | 孙克辉,谈国强,盛利元. Lyapunov指数计算算法的设计与实现[J]. 计算机工程与应用,2004, 40(35): 12-14. |
| SUN Kehui, TAN Guoqiang, SHENG Liyuan. Design and implementation of Lyapunov exponents calculating algorithm[J]. Computer Engineering and Applications, 2004, 40(35): 12-14. | |
| [18] | 闵颖颖,刘允刚. Barbalat引理及其在系统稳定性分析中的应用[J]. 山东大学学报(工学版), 2007, 37(1): 51-55. |
| MIN Yingying, LIU Yungang. Barbalat lemma and its application in analysis of system stability[J]. Journal of Shandong University (Engineering Science), 2007, 37(1): 51-55. |
| [1] | CHE Zhiyuan, YU Haitao, PANG Yuyi, ZHANG Jiahui. Tracking Differentiator-Based Dual-Time-Scale Sliding Mode Control for Permanent Magnet Synchronous Motor [J]. Journal of Shanghai Jiao Tong University, 2025, 59(9): 1249-1259. |
| [2] | HUANG JinFeng, ZHANG Qian. Cascade Sliding Mode Decoupling Control of Coupled Inductor Single-Input Dual-Output Buck Converter Based on Super-Twisting Extend State Observer [J]. Journal of Shanghai Jiao Tong University, 2025, 59(5): 592-604. |
| [3] | LIU Xinyu, WANG Sen, ZENG Long, YUAN Shaoheng, HAO Zhenghang, LU Xinyan. An Adaptive Additional Control Strategy for Suppressing Low-Frequency Grid Oscillations in Doubly-Fed Wind Farms [J]. Journal of Shanghai Jiao Tong University, 2023, 57(9): 1156-1164. |
| [4] | LI Mengxuan, GUO Jianguo, XU Xinpeng, SHEN Yuheng. Guidance Law Based on Proximal Policy Optimization [J]. Air & Space Defense, 2023, 6(4): 51-57. |
| [5] | HUANG He, GAO Yongbo, RU Feng, YANG Lan, WANG Huifeng. 3D Path Planning of UAV Based on Adaptive Slime Mould Algorithm Optimization [J]. Journal of Shanghai Jiao Tong University, 2023, 57(10): 1282-1291. |
| [6] | LIU Yuming, ZHAO Yong, DONG Zhengjian, WANG Ping, JI Yuqi. Formation Control Strategy of Multiple Mobile Robots Cooperative Operation Based on Backstepping Method [J]. Journal of Shanghai Jiao Tong University, 2023, 57(1): 103-115. |
| [7] | YUAN Dongdong (袁冬冬), WANG Yankai∗ (王彦恺). Data Driven Model-Free Adaptive Control Method for Quadrotor Trajectory Tracking Based on Improved Sliding Mode Algorithm [J]. J Shanghai Jiaotong Univ Sci, 2022, 27(6): 790-798. |
| [8] | LYU Shuo, ZHANG Qingzhen, GUO Yunhe, FENG Shuo. Attitude Control of Missile with Deflectable Nose Based on Backstepping Sliding Mode Control [J]. Air & Space Defense, 2022, 5(4): 30-37. |
| [9] | LIU Jiufu ∗ (刘久富), ZHENG Rui (郑锐), ZHOU Zaihong ∗ (周再红), ZHANG Xinzhe (张信哲),YANG Zhong (杨忠), WANG Zhisheng (王志胜). Feature Selection Optimization for Mahalanobis-Taguchi SystemUsing Chaos Quantum-Behavior Particle Swarm [J]. J Shanghai Jiaotong Univ Sci, 2021, 26(6): 840-846. |
| [10] | WANG Jiaqi, GUO Jianguo, GUO Zongyi, ZHAO Bin. Sliding Mode Control of High Mach Number Aircraft Based on Disturbance Observer [J]. Air & Space Defense, 2021, 4(3): 85-91. |
| [11] | WU Guanghui, FANG Dongyang, CHEN Yifen, LI Rui, SHAO Xiang. Research on Sliding Mode Guidance Law Based on Immersion and Invariance Estimator [J]. Air & Space Defense, 2021, 4(1): 91-96. |
| [12] | MEI Rong. Safe Flight Control of Unmanned Helicopter Under Forest Environment [J]. Journal of Shanghai Jiaotong University, 2020, 54(9): 994-999. |
| [13] | LIU Qiu, ZHAO Dongya. Discrete-Time Integral Sliding Mode Predictive Control for Single Input Single Output Systems [J]. Journal of Shanghai Jiaotong University, 2020, 54(9): 898-903. |
| [14] | XIA Li, ZOU Zaojian, YUAN Shuai, ZENG Zhihua. Uncertainty Quantification for CFD Simulation of Stochastic Drag Flow Based on Non-Intrusive Polynomial Chaos Method [J]. Journal of Shanghai Jiaotong University, 2020, 54(6): 584-591. |
| [15] | XU Changbiao, WU Xia, HE Yinghui, MO Yunhui . 5D Hyper-Chaotic System with Multiple Types of Equilibrium Points [J]. J Shanghai Jiaotong Univ Sci, 2020, 25(5): 639-649. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||