Journal of Shanghai Jiao Tong University ›› 2024, Vol. 58 ›› Issue (11): 1805-1815.doi: 10.16183/j.cnki.jsjtu.2024.221
• Guidance, Navigation and Control • Previous Articles Next Articles
LIU Yu, WEN Liyan( ), JIANG Bin, MA Yajie, CUI Yukang
), JIANG Bin, MA Yajie, CUI Yukang
Received:2024-06-13
Revised:2024-07-02
Accepted:2024-07-15
Online:2024-11-28
Published:2024-12-02
CLC Number:
LIU Yu, WEN Liyan, JIANG Bin, MA Yajie, CUI Yukang. Adaptive Output Consensus of Heterogeneous Multi-Agent System with Switching Topology[J]. Journal of Shanghai Jiao Tong University, 2024, 58(11): 1805-1815.
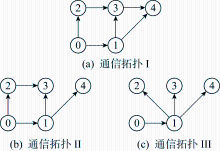
Fig.1
Topology structural abrupt changes caused by communication connection changes
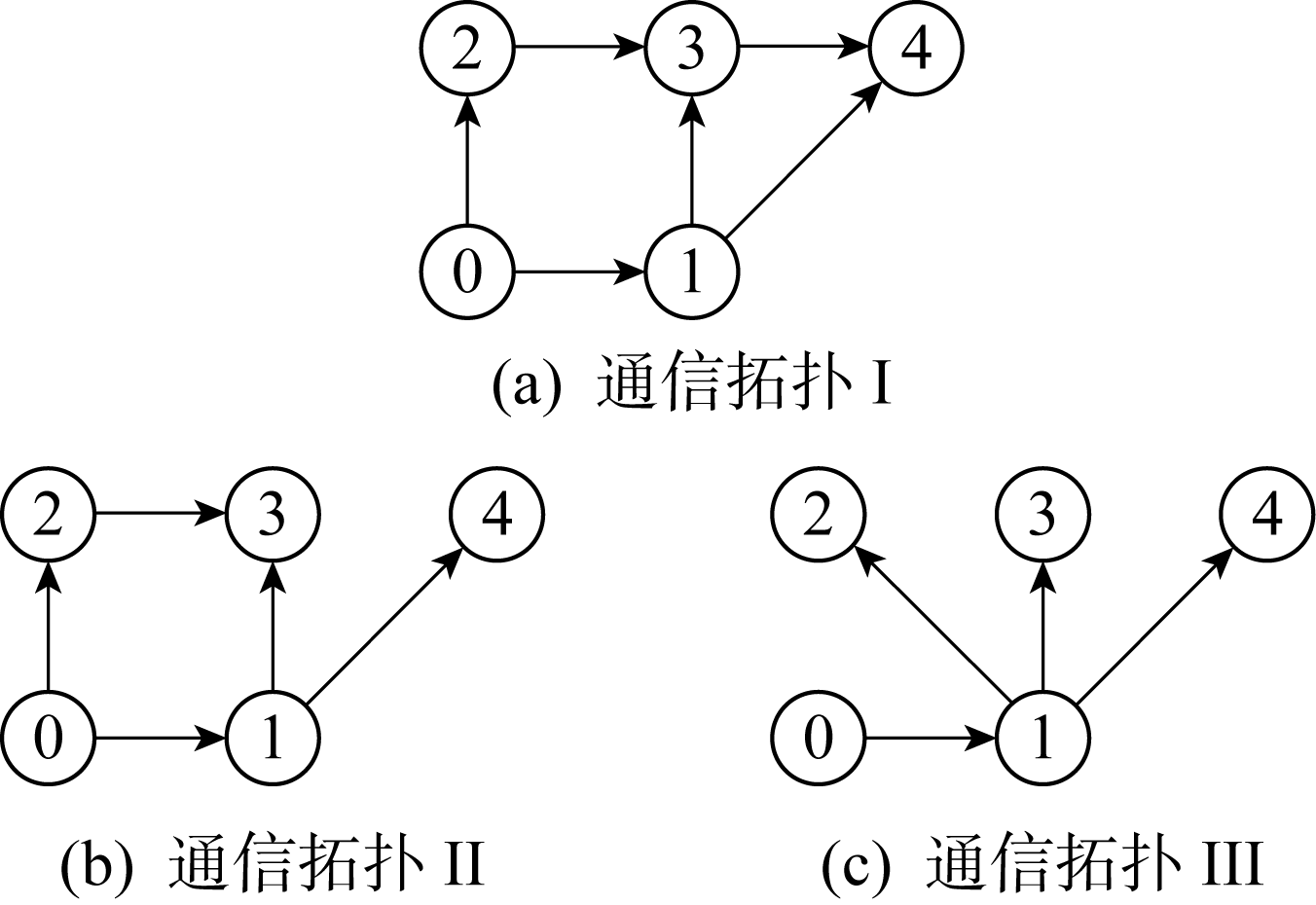
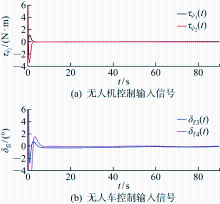
Fig.2
Control input signal of follower
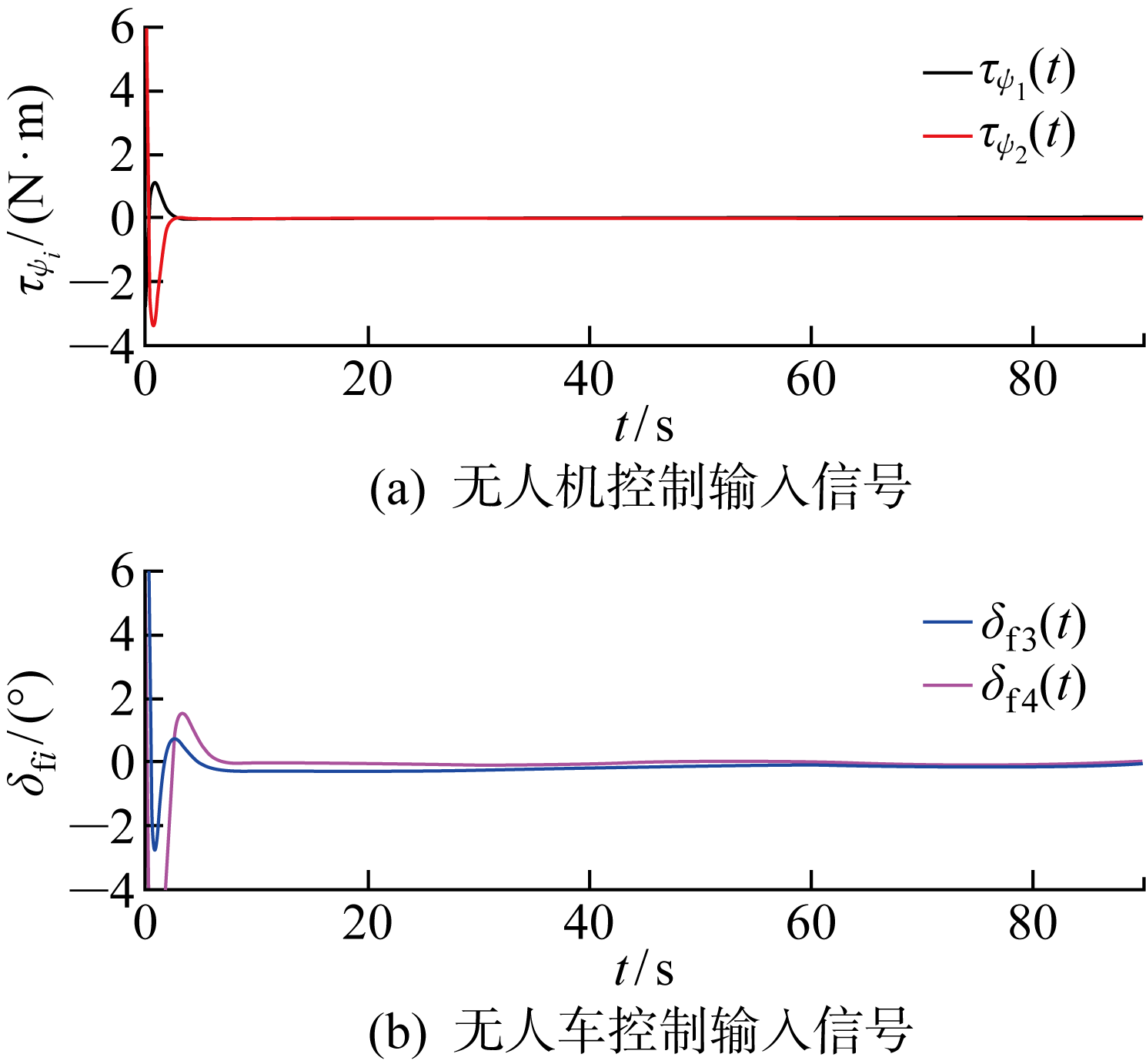
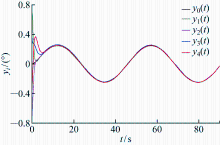
Fig.3
Output signals of leader-follower system
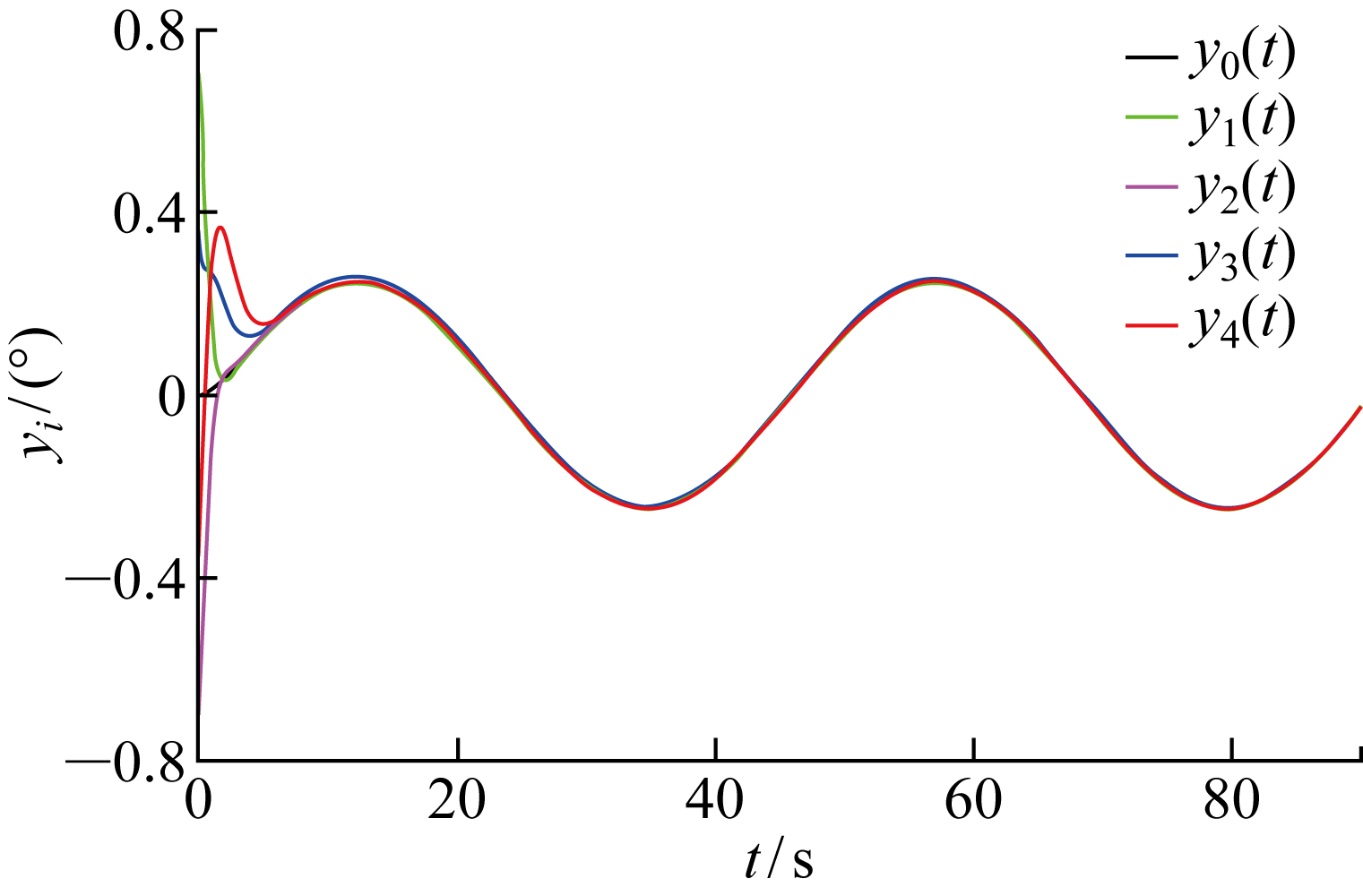
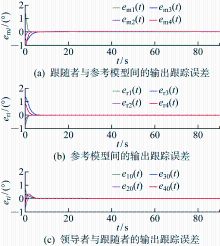
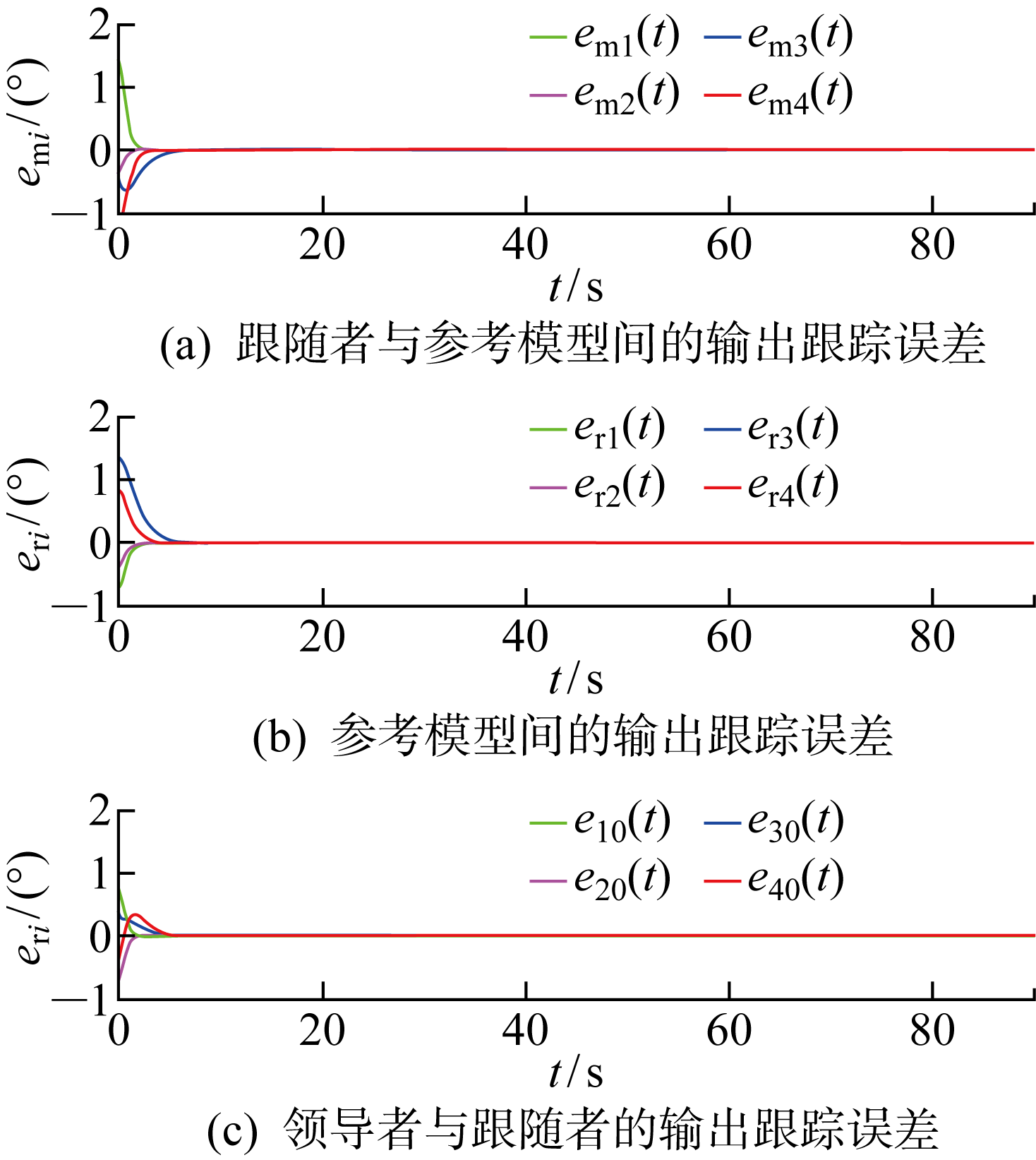
Fig.4
Output tracking error of leader-follower system
| [1] | GONG J, JIANG B, MA Y. Adaptive fault tolerant supervisory consensus control for nonlinear strict-feedback multiagent systems[C]//International Conference on Guidance, Navigation and Control. Singapore, Singapore: Springer, 2022: 1603-1703. |
| [2] | CHU H, CAI Y, ZHANG W. Consensus tracking for multi-agent systems with directed graph via distributed adaptive protocol[J]. Neurocomputing, 2015, 166: 8-13. |
| [3] | BAO G, MA L, YI X. Recent advances on cooperative control of heterogeneous multi-agent systems subject to constraints: A survey[J]. Systems Science & Control Engineering, 2022, 10(1): 539-551. |
| [4] | CANESE L, CARDARILLI G C, DI N L, et al. Multi-agent reinforcement learning: A review of challenges and applications[J]. Applied Sciences, 2021, 11(11): 1-25. |
| [5] | AMIRKHANI A, BARSHOOI A H. Consensus in multi-agent systems: A review[J]. Artificial Intelligence Review, 2022, 55(5): 3897-3935. |
| [6] | SKEIK O, LANZON A. Robust output consensus of homogeneous multi-agent systems with negative imaginary dynamics[J]. Automatica, 2020, 113: 108799. |
| [7] | BHATTACHARYYA S, PATRA S. Positive consensus of multi-agent systems with hierarchical control protocol[J]. Automatica, 2022, 139: 110191. |
| [8] | YU P, LIU K, LIU X, et al. Robust consensus tracking control of uncertain multi-agent systems with local disturbance rejection[J]. IEEE/CAA Journal of Automatica Sinica, 2023, 10(2): 427-438. |
| [9] | 沈林成, 牛轶峰, 朱华勇. 多无人机自主协同控制理论与方法[M]. 北京: 国防工业出版社, 2013. |
| SHEN Lincheng, NIU Yifeng, ZHU Huayong. Theories and methods of autonomous cooperative control for multiple UAVs[M]. Bejing: National Defense Industry Press, 2013. | |
| [10] | HU D, VINCENT J L G, WANG T, et al. Multi-agent robotic system (MARS) for UAV-UGV path planning and automatic sensory data collection in cluttered environments[J]. Building and Environment, 2022, 221: 109349. |
| [11] | YAN B, SHI P, LIM C C. Robust formation control for nonlinear heterogeneous multiagent systems based on adaptive event-triggered strategy[J]. IEEE Transactions on Automation Science and Engineering, 2022, 19(4): 2788-2800. |
| [12] |
YAO D, LI H, LU R, et al. Distributed sliding-mode tracking control of second-order nonlinear multiagent systems: An event-triggered approach[J]. IEEE Transactions on Cybernetics, 2020, 50(9): 3892-3902.
doi: 10.1109/TCYB.2019.2963087 pmid: 31995513 |
| [13] | ZHANG J, ZHANG H, LU Y, et al. Cooperative output regulation of heterogeneous linear multi-agent systems with edge-event triggered adaptive control under time-varying topologies[J]. Neural Computing and Applications, 2020, 32(19): 15573-15584. |
| [14] | WEN L, TAO G, YANG H, et al. Adaptive actuator failure compensation for possibly nonminimum-phase systems using control separation based LQ design[J]. IEEE Transactions on Automatic Control, 2018, 64(1): 143-158. |
| [15] | WEN L, TAO G, JIANG B, et al. Adaptive LQ control using reduced hamiltonian for continuous-time systems with unmatched input disturbances[J]. SIAM Journal on Control and Optimization, 2021, 59(5): 3625-3660. |
| [16] | HAN T, GUAN Z, XIAO B, et al. Bipartite average tracking for multi-agent systems with disturbances: Finite-time and fixed-time convergence[J]. IEEE Transactions on Circuits and Systems I: Regular Papers, 2021, 68(10): 4393-4402. |
| [17] | CAO W, LIU L, FENG G. Distributed adaptive output consensus of unknown heterogeneous non-minimum phase multi-agent systems[J]. IEEE/CAA Journal of Automatica Sinica, 2023, 10(4): 997-1008. |
| [18] | YANG R, LIU L, FENG G. Cooperative output tracking of unknown heterogeneous linear systems by distributed event-triggered adaptive control[J]. IEEE Transactions on Cybernetics, 2020, 52(1): 3-15. |
| [19] | 马思迁, 董朝阳, 马鸣宇, 等. 基于自适应通信拓扑四旋翼无人机编队重构控制[J]. 北京航空航天大学学报, 2018, 44(4): 841-850. |
| MA Siqian, DONG Chaoyang, MA Mingyu, et al. Formation reconfiguration control of quadrotor UAVs based on adaptive communication topology[J]. Journal of Beijing University of Aeronautics and Astronasutics, 2018, 44(4): 841-850. | |
| [20] | BALDI S, YUAN S, PAOLO F. Output synchronization of unknown heterogeneous agents via distributed model reference adaptation[J]. IEEE Transactions on Control of Network Systems, 2018, 6(2): 515-525. |
| [21] | ROSA M R. Adaptive synchronization for heterogeneous multi-agent systems with switching topologies[J]. Machines, 2018, 6(1): 1-18. |
| [22] | SONG G, TAO G, TAN C. A distributed adaptive state feedback control scheme for output consensus of multi-agent systems[C]//Asian Control Conference. Piscataway, USA: IEEE, 2019: 1149-1154. |
| [23] | WEN L, TAO G, YANG H, et al. Aircraft turbulence compensation using adaptive multivariable disturbance rejection techniques[J]. Journal of Guidance, Control, and Dynamics, 2015, 38(5): 954-963. |
| [24] | TAO G. Adaptive control design and analysis[M]. New York, USA: John Wiley & Sons, 2003. |
| [25] | 杨浩, 姜斌, 周东华. 互联系统容错控制的研究回顾与展望[J]. 自动化学报, 2017, 43(1): 9-19. |
| YANG Hao, JIANG Bin, ZHOU Donghua. Review and perspectives on fault tolerant control for interconnected systems[J]. Acta Automatica Sinica, 2017, 43(1): 9-19. | |
| [26] | ESTEBAN R, ANTONIO L, LOANNIS S, et al. Robust consensus of high-order systems under output constraints: Application to rendezvous of underactuated UAVs[J]. IEEE Transactions on Automatic Control, 2023, 68(1): 329-342. |
| [27] | CHANG J, SHI H, ZHU S, et al. Time cost for consensus of stochastic multiagent systems with pinning control[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2023, 53(1): 94-104. |
| [28] | XU H, YU T, REN C, et al. Finite-time decentralized sliding mode control for interconnected systems and its application to electrical power systems: A GA-assisted design method[J]. IEEE Transactions on Circuits and Systems I: Regular Papers, 2024, 71(6): 2835-2847. |
| [29] | DI G S. Output stabilization of flexible spacecraft with active vibration suppression[J]. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(3): 747-759. |
| [30] | VOURNAS C D, PAPADIAS B C. Power system stabilization via parameter optimization-application to the hellenic interconnected system[J]. IEEE Transactions on Power Systems, 1987, 2(3): 615-622. |
| [31] | SONG G, TAO G. Adaptive leader-following state consensus of multiagent systems with switching topology[J]. International Journal of Adaptive Control and Signal Processing, 2018, 32(10): 1508-1528. |
| [1] | WU Xiaojing∗(武晓晶), CAO Tongyao (曹童瑶), ZHEN Ran (甄然), LI Zhijie (李志杰). AlgoTime-Varying Formation-Containment Tracking Control for Unmanned Aerial Vehicle Swarm Systems with Switching Topologies and a Non-Cooperative Target [J]. J Shanghai Jiaotong Univ Sci, 2024, 29(4): 689-701. |
| [2] | GENG Zongsheng1 (耿宗盛), ZHAO Dongdong1,2 (赵东东), ZHOU Xingwen1 (周兴文), YAN Lei1 (闫磊), YAN Shi1,2∗ (阎石). Leader-Following Consensus of Multi-Agent Systems via Fully Distributed Event-Based Control [J]. J Shanghai Jiaotong Univ Sci, 2024, 29(4): 640-645. |
| [3] | JIAO Cong, XU Zhaosheng, LI Wei, TIAN Daogui, CHEN Lian, ZHAO Zheng. Aerial Induced Countermeasure Method Against Distributed Swarms [J]. Air & Space Defense, 2024, 7(4): 114-120. |
| [4] | YUAN Dongdong (袁冬冬), WANG Yankai∗ (王彦恺). Data Driven Model-Free Adaptive Control Method for Quadrotor Trajectory Tracking Based on Improved Sliding Mode Algorithm [J]. J Shanghai Jiaotong Univ Sci, 2022, 27(6): 790-798. |
| [5] | DING Ming, MENG Shuai, WANG Shuheng, XIA Xi. Neural-Network-Based Adaptive Feedback Linearization Control for 6-DOF Wave Compensation Platform [J]. Journal of Shanghai Jiao Tong University, 2022, 56(2): 165-172. |
| [6] | JIN Haochun, GE Minhui, XU Bo. Optimization of DFIG Comprehensive Adaptive Frequency Regulation Parameters Based on Extreme Learning Machine [J]. Journal of Shanghai Jiao Tong University, 2021, 55(S2): 42-50. |
| [7] | SHI Qiang (师 强), ZHANG Jianlin (张建林), YANG Ming∗ (杨 明). Curvature Adaptive Control Based Path Following for Automatic Driving Vehicles in Private Area [J]. J Shanghai Jiaotong Univ Sci, 2021, 26(5): 690-698. |
| [8] | FU Hao, ZHOU Bohua, MA Mengchen. Adaptive Sliding Mode Guidance Law with Prescribed Performance [J]. Air & Space Defense, 2020, 3(3): 63-70. |
| [9] | YAO Laipeng, HOU Baolin, LIU Xi. Adaptive Terminal Sliding Mode Control of a Howitzer Shell Transfer Arm with Friction Compensation [J]. Journal of Shanghai Jiaotong University, 2020, 54(2): 144-151. |
| [10] | GUO Qinyang,SHI Guanglin,WANG Dongmei. Composite Adaptive Control for Electro-Hydraulic Servo System Under Interval Excitation Condition [J]. Journal of Shanghai Jiaotong University, 2019, 53(6): 639-646. |
| [11] | Xue Changsen, Qi Zhidong, Shan Liang, Tang Pengliang. Design of Fractional Order MRAC Based on the Hyper Stability Theory [J]. Air & Space Defense, 2018, 1(1): 44-49. |
| [12] | Xinhua SHI, Zhifeng ZHOU. Research of Adaptive Flux Weakening Strategy of Permanent Magnet Synchronous Motor [J]. Research and Exploration in Laboratory, 2017, 36(5): 40-43. |
| [13] | LONG Hai-hui (龙海辉), ZHAO Jian-kang*(赵健康), LAI Jian-qing (赖剑清). H∞ Inverse Optimal Adaptive Fault-Tolerant Attitude Control for Flexible Spacecraft with Input Saturation [J]. Journal of shanghai Jiaotong University (Science), 2015, 20(5): 513-527. |
| [14] | YANG Qing-zhao (杨青照), ZHOU Ming* (周明), TIAN Hong-sen (田洪森),ZHANG Hui-sheng (张惠生), XU Dong-hui(许东晖). Simulation of Adaptive Control Strategy for Electrical Discharge Machining Process [J]. Journal of shanghai Jiaotong University (Science), 2015, 20(4): 408-414. |
| [15] | LI Jinsonga,YANG Lianb,WANG Letiana. Control of Small Scale Quad-Rotor Helicopter Using Adaptive Control-Optimization [J]. Journal of Shanghai Jiaotong University, 2015, 49(02): 202-208. |
| Viewed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
Full text 122
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
Abstract 230
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||