Journal of Shanghai Jiao Tong University ›› 2023, Vol. 57 ›› Issue (1): 93-102.doi: 10.16183/j.cnki.jsjtu.2021.223
Special Issue: 《上海交通大学学报》2023年“机械与动力工程”专题
• Mechanical Engineering • Previous Articles Next Articles
QIU Kejun, BAO Zhongkai, CHEN Lu( )
)
Received:2021-06-05
Revised:2021-08-03
Online:2023-01-28
Published:2023-01-13
Contact:
CHEN Lu
E-mail:chenlu@sjtu.edu.cn.
Fig.1
Grid map of final assembly workshop
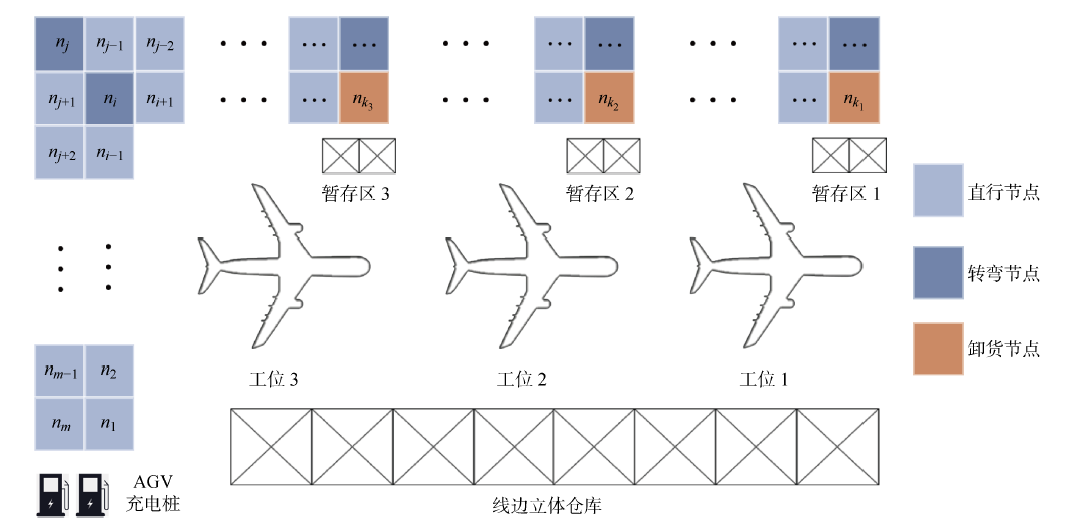
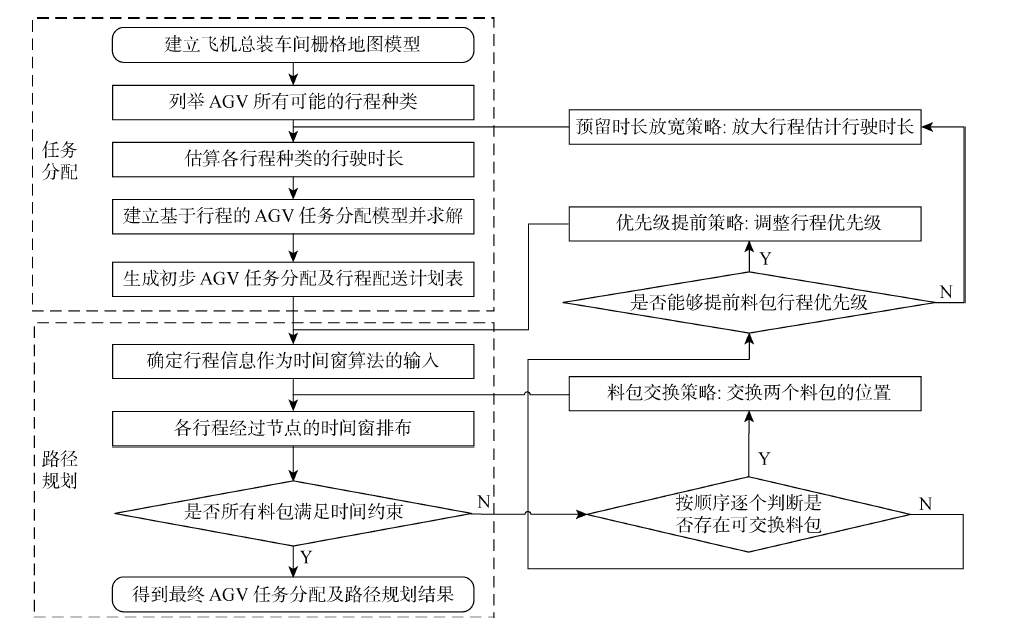
Fig.2
Flow chart of two-stage method
Tab.1
Information of trips
| 行程编号 | 目标暂存区 | 配送料包数量 | 行驶时长/min | 行程编号 | 目标暂存区 | 配送料包数量 | 行驶时长/min |
|---|---|---|---|---|---|---|---|
| 1 | 暂存区3 | 1 | 6 | 6 | 暂存区1 | 2 | 10 |
| 2 | 暂存区3 | 2 | 6 | 7 | 暂存区3、暂存区2 | 2 | 8 |
| 3 | 暂存区2 | 1 | 8 | 8 | 暂存区3、暂存区1 | 2 | 10 |
| 4 | 暂存区2 | 2 | 8 | 9 | 暂存区2、暂存区1 | 2 | 10 |
| 5 | 暂存区1 | 1 | 10 |
Tab.2
Material requirement information for some AO
| AO编号 | 需求时间/h | 目标工位 | AO编号 | 需求时间/h | 目标工位 |
|---|---|---|---|---|---|
| 150C08RW6040 | 0 | 暂存区3 | 140C08ZF3401 | 8 | 暂存区2 |
| 150C08RW6030 | 0 | 暂存区3 | 140C08ZF3300 | 8 | 暂存区2 |
| 140C07BS0080 | 0 | 暂存区2 | 140C08ZF2500 | 8 | 暂存区2 |
| 140C05DA0030 | 0 | 暂存区2 | 140C08ZF2400 | 8 | 暂存区2 |
| 130C06KS0010 | 0 | 暂存区1 | 140C08ZF2100 | 8 | 暂存区2 |
| 130C01PJ0050 | 0 | 暂存区1 | 130C01RS0010 | 8 | 暂存区1 |
| 150C03RD0260 | 1 | 暂存区3 | 130C01KS0010 | 8 | 暂存区1 |
| 150C03JD0010 | 1 | 暂存区3 | 150C04SA0010 | 8.25 | 暂存区3 |
| 150C03DD0210 | 1 | 暂存区3 | 150C04AA0070 | 8.25 | 暂存区3 |
| 150C03DD0160 | 1 | 暂存区3 | 150C05SA0040 | 9 | 暂存区3 |
Tab.3
Number of packages required to be daily delivered
| 工作日编号 | AO料包数量 | 工作日编号 | AO料包数量 |
|---|---|---|---|
| Day1 | 59 | Day8 | 53 |
| Day2 | 76 | Day9 | 58 |
| Day3 | 59 | Day10 | 75 |
| Day4 | 55 | Day11 | 61 |
| Day5 | 73 | Day12 | 33 |
| Day6 | 62 | Day13 | 47 |
| Day7 | 65 | Day14 | 36 |
Tab.4
Solution time and adjustment strategy of examples with 50, 100, and 150 packages
| 算例编号 | 料包数 | 求解时长/s | 调整策略 | 算例编号 | 料包数 | 求解时长/s | 调整策略 |
|---|---|---|---|---|---|---|---|
| 1 | 50 | 5.30 | — | 16 | 100 | 79.17 | — |
| 2 | 50 | 18.01 | — | 17 | 100 | 60.97 | 优先级提前 |
| 3 | 50 | 23.48 | — | 18 | 100 | 31.20 | — |
| 4 | 50 | 20.55 | — | 19 | 100 | 23.75 | — |
| 5 | 50 | 11.29 | — | 20 | 100 | 34.81 | — |
| 6 | 50 | 23.55 | — | 21 | 150 | 167.17 | 料包交换 |
| 7 | 50 | 14.72 | — | 22 | 150 | 197.26 | 料包交换 |
| 8 | 50 | 20.32 | — | 23 | 150 | 215.47 | 料包交换 |
| 9 | 50 | 14.70 | — | 24 | 150 | 122.01 | 料包交换 |
| 10 | 50 | 6.71 | — | 25 | 150 | 115.22 | 料包交换 |
| 11 | 100 | 24.29 | — | 26 | 150 | 163.90 | — |
| 12 | 100 | 57.54 | — | 27 | 150 | 113.82 | 料包交换 |
| 13 | 100 | 23.01 | — | 28 | 150 | 193.61 | — |
| 14 | 100 | 34.48 | — | 29 | 150 | 95.58 | — |
| 15 | 100 | 42.00 | — | 30 | 150 | 238.81 | 料包交换 |
Tab.5
Optimal task allocation solution of Example 17
| 行程 编号 | AGV编号 | ||||
|---|---|---|---|---|---|
| AGV1 | AGV2 | AGV3 | AGV4 | AGV5 | |
| 行程1 | 16, 37 | 24, 28 | 14, 29 | 30, 34 | 20, 23 |
| 行程2 | 52, 64 | 45, 61 | 15, 26 | 9, 18 | 66, 73 |
| 行程3 | 42, 47 | 41, 43 | 53, 59 | 31, 36 | 19, 90 |
| 行程4 | 55, 93 | 48, 57 | 50, 58 | 51, 62 | 21, 67 |
| 行程5 | 32, 35 | 46, 56 | 25, 79 | 54, 63 | 22, 68 |
| 行程6 | 11, 12 | 6, 39 | 13, 38 | 7, 17 | 1, 2 |
| 行程7 | 49, 65 | 8, 33 | 75, 76 | 27, 69 | 100, 74 |
| 行程8 | 77, 82 | 98, 99 | 10, 40 | 89, 96 | 4, 5 |
| 行程9 | 78, 88 | 70, 72 | 94, 95 | 91, 92 | 3, 84 |
| 行程10 | 85, 86 | 71, 83 | 80, 97 | 81, 87 | 44, 60 |

Fig.3
Time window planning results of Example 17
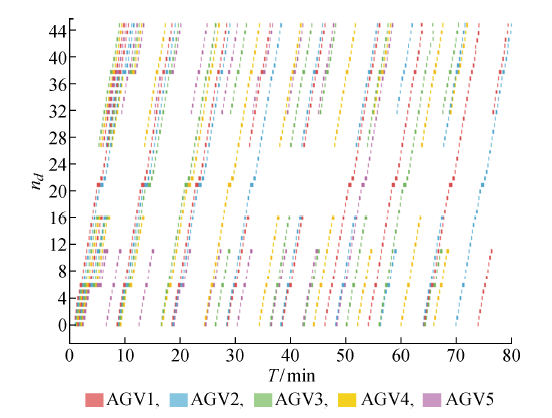

Fig.4
Time window planning results of Trips 1—7 at Nodes 10—21 before and after adjustment

| [1] |
HU H T, CHEN X Z, WANG T S, et al. A three-stage decomposition method for the joint vehicle dispatching and storage allocation problem in automated container terminals[J]. Computers & Industrial Engineering, 2019, 129: 90-101.
doi: 10.1016/j.cie.2019.01.023 URL |
| [2] |
ZOU W Q, PAN Q K, MENG T, et al. An effective discrete artificial bee colony algorithm for multi-AGVs dispatching problem in a matrix manufacturing workshop[J]. Expert Systems with Applications, 2020, 161: 113675.
doi: 10.1016/j.eswa.2020.113675 URL |
| [3] | 夏扬坤, 符卓, 谢九勇. 依订单拆分的多自动导引车物料配送路径规划[J]. 计算机集成制造系统, 2017, 23(7): 1520-1528. |
| XIA Yangkun, FU Zhuo, XIE Jiuyong. Material distribution route planning for multiple automated guided vehicles with split deliveries by order[J]. Computer Integrated Manufacturing Systems, 2017, 23(7): 1520-1528. | |
| [4] |
ZOU W Q, PAN Q K, WANG L. An effective multi-objective evolutionary algorithm for solving the AGV scheduling problem with pickup and delivery[J]. Knowledge-Based Systems, 2021, 218(3): 106881.
doi: 10.1016/j.knosys.2021.106881 URL |
| [5] | 汤红杰, 王鼎, 皇攀凌, 等. 优化Dijkstra算法在工厂内物流AGV路径规划的研究[J]. 机械设计与制造, 2018(1): 117-120. |
| TANG Hongjie, WANG Ding, HUANG Panling, et al. AGV path planning based on optimized Dijkstra algorithm in logistics factory[J]. Machinery Design & Manufacture, 2018(1): 117-120. | |
| [6] | RADHIA Z, KHALED M, SIMON C D, et al. A hybrid method for assigning containers to AGVs in container terminal[J]. IFAC-PapersOnLine, 2016, 49(3): 96-103. |
| [7] | WANG C B, WANG L, Qin J, et al. Path planning of automated guided vehicles based on improved A-star algorithm[C]//2015 IEEE International Conference on Information and Automation. Lijiang, China: IEEE, 2019: 2071-2076. |
| [8] | FRANTISEK D, ANDREJ B, MARTIN K, et al. Path planning with modified A star algorithm for a mobile robot[J]. Procedia Engineering, 2014(96): 59-69. |
| [9] | 赵大兴, 余明进, 许万. 基于高适应度值遗传算法的AGV最优路径规划[J]. 计算机工程与设计, 2017, 38(6): 1635-1641. |
| ZHAO Daxing, YU Mingjin, XU Wan. AGV optimal path planning based on genetic algorithms of large fitness value[J]. Computer Engineering and Design, 2017, 38(6): 1635-1641. | |
| [10] |
ZHONG M S, YANG Y S, YASSER D, et al. Multi-AGV scheduling for conflict-free path planning in automated container terminals[J]. Computers & Industrial Engineering, 2020, 142: 106371
doi: 10.1016/j.cie.2020.106371 URL |
| [11] | 罗强, 王海宝, 崔小劲, 等. 改进人工势场法自主移动机器人路径规划[J]. 控制工程, 2019, 26(6): 1091-1098. |
| LUO Qiang, WANG Haibao, CUI Xiaojing, et al. Autonomous mobile robot path planning based on improved artificial potential method[J]. Control Engineering of China, 2019, 26(6): 1091-1098. | |
| [12] |
程志, 张志安, 李金芝, 等. 改进人工势场法的移动机器人路径规划[J]. 计算机工程与应用, 2019, 55(23): 29-34.
doi: 10.3778/j.issn.1002-8331.1904-0472 |
|
CHENG Zhi, ZHANG Zhi’an, LI Jinzhi, et al. Mobile robots path planning based on improved artificial potential field[J]. Computer Engineering and Applications, 2019, 55(23): 29-34.
doi: 10.3778/j.issn.1002-8331.1904-0472 |
|
| [13] |
XING L, LIU Y, LI H, et al. A novel tabu search algorithm for multi-AGV routing problem[J]. Mathematics, 2020, 8(2): 279.
doi: 10.3390/math8020279 URL |
| [14] | 曾庆成, 李明泽, 薛广顺. 考虑拥堵因素的自动化码头多AGV无冲突动态路径规划模型[J]. 大连海事大学学报, 2019, 45(4): 35-44. |
| ZENG Qingcheng, LI Mingze, XUE Guangshun. Multiple AGV conflict-free dynamic routing model in automated terminals considering congestion factors[J]. Journal of Dalian Maritime University, 2019, 45(4): 35-44. | |
| [15] | 刘辉, 肖克, 王京擘. 基于多智能体强化学习的多AGV路径规划方法[J]. 自动化与仪表, 2020, 35(2): 84-89. |
| LIU Hui, XIAO Ke, WANG Jingbo. Multi-AGV path planning method based on multi-agent reinforcement learning[J]. Automation & Instrumentation, 2020, 35(2): 84-89. | |
| [16] |
MURAKAMI K. Time-space network model and MILP formulation of the conflict-free routing problem of a capacitated AGV system[J]. Computers & Industrial Engineering, 2020, 141: 106270.
doi: 10.1016/j.cie.2020.106270 URL |
| [17] |
杨雅洁, 苌道方, 余芳. 考虑AGV避碰的自动化码头多资源协同调度[J]. 计算机工程与应用, 2020, 56(6): 246-253.
doi: 10.3778/j.issn.1002-8331.1812-0069 |
|
YANG Yajie, CHANG Daofang, YU Fang. Multi-resource coordinated scheduling of automated terminals considering AGV collision avoidance[J]. Computer Engineering and Applications, 2020, 56(6): 246-253.
doi: 10.3778/j.issn.1002-8331.1812-0069 |
|
| [18] | 泰应鹏, 邢科新, 林叶贵, 等. 多AGV路径规划方法研究[J]. 计算机科学, 2017(Sup.2): 84-87. |
| TAI Yingpeng, XING Kexin, LIN Yegui, et al. Research of path planning in multi-AGV system[J]. Computer Science, 2017(Sup.2): 84-87. | |
| [19] |
KELEN V, LUIS F R, NADIA J M, et al. Integrated tasks assignment and routing for the estimation of the optimal number of AGVS[J]. The International Journal of Advanced Manufacturing Technology, 2016, 82(1/2/3/4): 719-736.
doi: 10.1007/s00170-015-7343-4 URL |
| [20] | HAO J, WANG C, YANG M, et al. Hybrid genetic algorithm based dispatch and conflict-free routing method of AGV systems in unmanned underground parking lots[C]//2020 IEEE International Conference on Real-time Computing and Robotics. Asahikawa, Japan: IEEE, 2020: 475-480. |
| [21] | RIAZI S, DIDING T, FALKMAN P, et al. Scheduling and routing of AGVs for large-scale flexible manufacturing systems[C]//2019 IEEE 15th International Conference on Automation Science and Engineering. Vancouver, Canada: IEEE, 2019: 891-896. |
| [22] |
余翀, 邱其文. 基于栅格地图的分层式机器人路径规划算法[J]. 中国科学院大学学报, 2013, 30(4): 528-538.
doi: 10.7523/j.issn.2095-6134.2013.04.015 |
|
YU Chong, QIU Qiwen. Hierarchical robot path planning algorithm based on grid map[J]. Journal of University of Chinese Academy of Sciences, 2013, 30(4): 528-538.
doi: 10.7523/j.issn.2095-6134.2013.04.015 |
|
| [23] | 胡彬, 王冰, 王春香, 等. 一种基于时间窗的自动导引车动态路径规划方法[J]. 上海交通大学学报, 2012, 46(6): 967-971. |
| HU Bin, WANG Bing, WANG Chunxiang, et al. Dynamic routing of automated guided vehicles based on time window[J]. Journal of Shanghai Jiao Tong University, 2012, 46(6): 967-971. |
| [1] | HUANG He, GAO Yongbo, RU Feng, YANG Lan, WANG Huifeng. 3D Path Planning of UAV Based on Adaptive Slime Mould Algorithm Optimization [J]. Journal of Shanghai Jiao Tong University, 2023, 57(10): 1282-1291. |
| [2] | LI Erchao∗ (李二超), QI Kuankuan (齐款款). Ant Colony Algorithm Path Planning Based on Grid Feature Point Extraction [J]. J Shanghai Jiaotong Univ Sci, 2023, 28(1): 86-99. |
| [3] | LI Shiqi (李世其), LI Xiao∗ (李肖), HAN Ke (韩可), XIONG Youjun (熊友军), XIE Zheng (谢铮), CHEN Jinliang (陈金亮). Path Planning and Optimization of Humanoid Manipulator in Cartesian Space [J]. J Shanghai Jiaotong Univ Sci, 2022, 27(5): 614-620. |
| [4] | WANG Liang (王 亮), WANG Bing (王 冰), WANG Chunxiang∗ (王春香). Collision-Free Path Planning with Kinematic Constraints in Urban Scenarios [J]. J Shanghai Jiaotong Univ Sci, 2021, 26(5): 731-738. |
| [5] | JIN Yudong (靳宇栋), FENG Jiabo (冯家波), ZHANG Weijun (张伟军). UAV Task Allocation for Hierarchical Multiobjective Optimization in Complex Conditions Using Modified NSGA-III with Segmented Encoding [J]. J Shanghai Jiaotong Univ Sci, 2021, 26(4): 431-445. |
| [6] | LI Zhaoying, OU Yiming, SHI Ruoling. Improved RRT Path Planning Algorithm Based on Deep Q-network [J]. Air & Space Defense, 2021, 4(3): 17-23. |
| [7] | LI Zheng, CHEN Jianwei, PENG Bo . UAV Cluster Path Planning Based on Pseudo-spectral Method [J]. Air & Space Defense, 2021, 4(1): 52-59. |
| [8] | WU Xin (武星), PU Juan (蒲娟), XIE Shaorong (谢少荣) . Attacking Strategy of Multiple Unmanned Surface Vehicles with Improved GWO Algorithm Under Control of Unmanned Aerial Vehicles [J]. Journal of Shanghai Jiao Tong University (Science), 2020, 25(2): 201-207. |
| [9] | WU Xing (武星), LIU Yuan (刘远), XIE Shaorong (谢少荣), GUO Yike (郭毅可). Collaborative Defense with Multiple USVs and UAVs Based on Swarm Intelligence [J]. Journal of Shanghai Jiao Tong University (Science), 2020, 25(1): 51-56. |
| [10] | CHEN Yaojie* (陈姚节), XIANG Shanshan (项珊珊), CHEN Feixiang (陈飞翔). Research on a Task Planning Method for Multi-Ship Cooperative Driving [J]. Journal of Shanghai Jiao Tong University (Science), 2019, 24(2): 233-242. |
| [11] | YANG Qing (杨轻), YANG Zhong (杨忠), HU Guoxiong (胡国雄), DU Wei (杜威). A New Fusion Chemical Reaction Optimization Algorithm Based on Random Molecules for Multi-Rotor UAV Path Planning in Transmission Line Inspection [J]. Journal of Shanghai Jiao Tong University (Science), 2018, 23(5): 671-677. |
| [12] | SUN Ling (孙玲). A Real-Time Collision-Free Path Planning of a Rust Removal Robot Using an Improved Neural Network [J]. Journal of shanghai Jiaotong University (Science), 2017, 22(5): 633-640. |
| [13] | LE Jian,ZHANG Hua,YE Yanhui,FAN Yu. Robot Tracking of Vertical Welding Seam Based on Rotating Arc Sensor [J]. Journal of Shanghai Jiaotong University, 2015, 49(03): 348-352. |
| [14] | XU Bo,MIN Huaqing,XIAO Fangxiong. Ant Colony Algorithm for Solving Discrete Minimum Constraint Removal (MCR) Problem [J]. Journal of Shanghai Jiaotong University, 2015, 49(03): 383-386. |
| [15] | YANG Chengdong,ZHONG Jiyong,CHEN Yuxi,CHEN Shanben. Correction of MultiLayer Path Planning Based on Vision Recognition [J]. Journal of Shanghai Jiaotong University, 2015, 49(03): 297-300. |
| Viewed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
Full text 434
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
Abstract 890
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||