Journal of Shanghai Jiao Tong University ›› 2023, Vol. 57 ›› Issue (1): 103-115.doi: 10.16183/j.cnki.jsjtu.2021.325
Special Issue: 《上海交通大学学报》2023年“机械与动力工程”专题
• Mechanical Engineering • Previous Articles Next Articles
LIU Yuming1, ZHAO Yong1( ), DONG Zhengjian2, WANG Ping2, JI Yuqi2
), DONG Zhengjian2, WANG Ping2, JI Yuqi2
Received:2021-08-20
Revised:2021-10-08
Online:2023-01-28
Published:2023-01-13
Contact:
ZHAO Yong
E-mail:zhaoyong@sjtu.edu.cn.
CLC Number:
LIU Yuming, ZHAO Yong, DONG Zhengjian, WANG Ping, JI Yuqi. Formation Control Strategy of Multiple Mobile Robots Cooperative Operation Based on Backstepping Method[J]. Journal of Shanghai Jiao Tong University, 2023, 57(1): 103-115.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2021.325
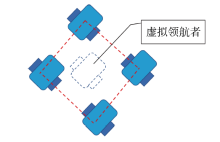
Fig.1
Rigid structure formation guided by virtual navigator
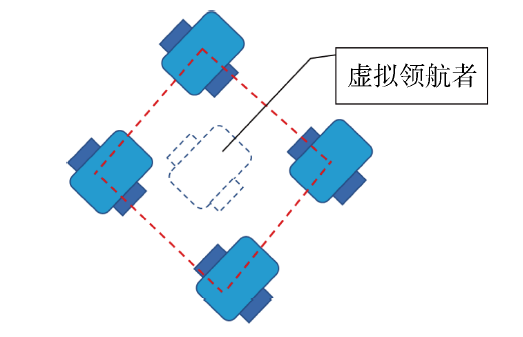
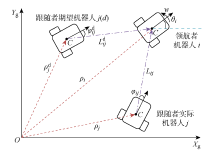
Fig.2
Pose error analysis of leader and follower formation
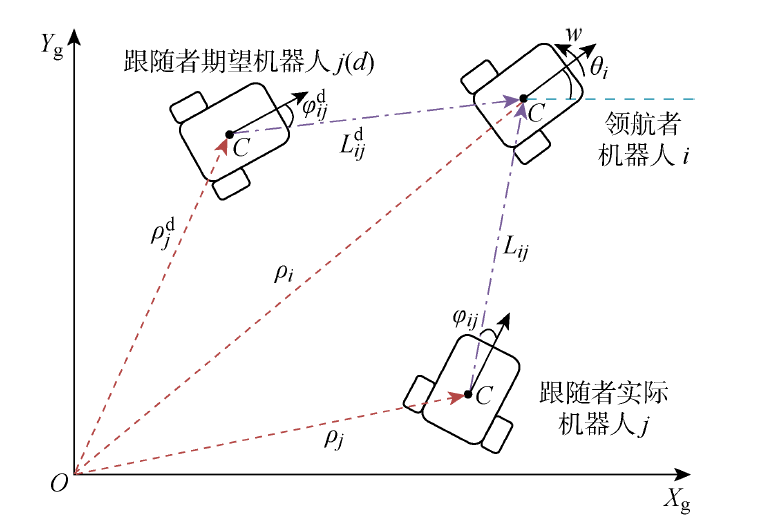

Fig.3
Designed flow chart of overall formation controller
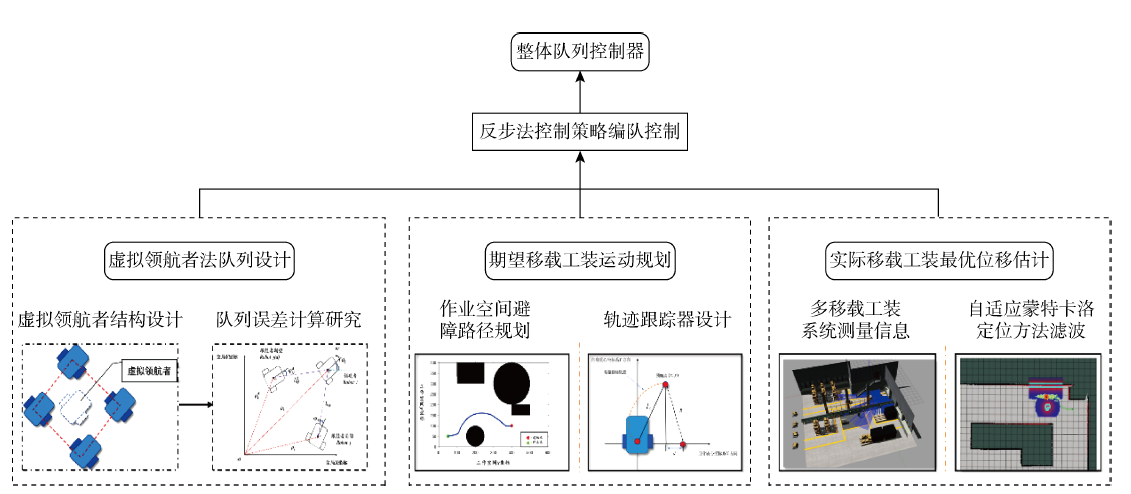
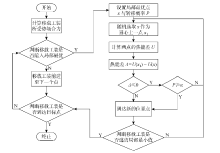
Fig.4
Algorithm steps of APF method in combination with simulated annealing


Fig.5
Diagram of escaping from local optimum by simulated annealing
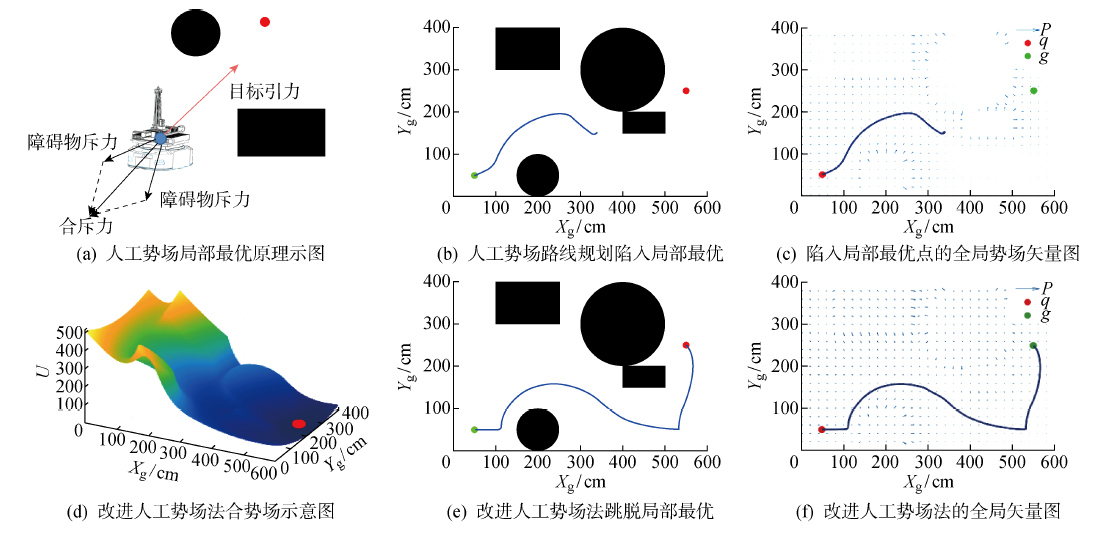
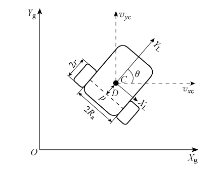
Fig.6
Schematic of simplified kinematic model of transfer tooling
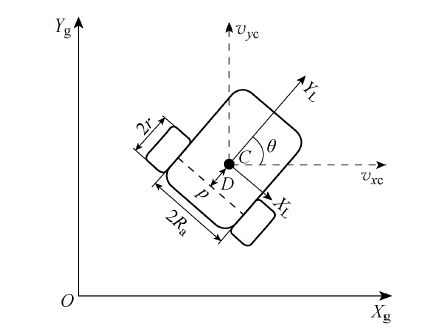
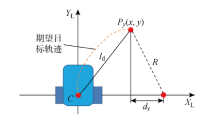
Fig.7
Geometric relationship schematic of pure pursuit tracking method
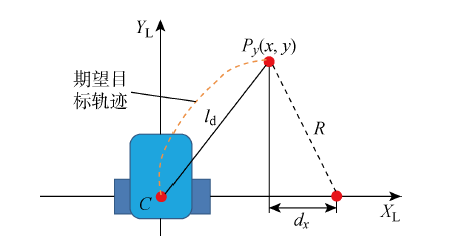

Fig.8
Location convergence process of AMCL algorithm
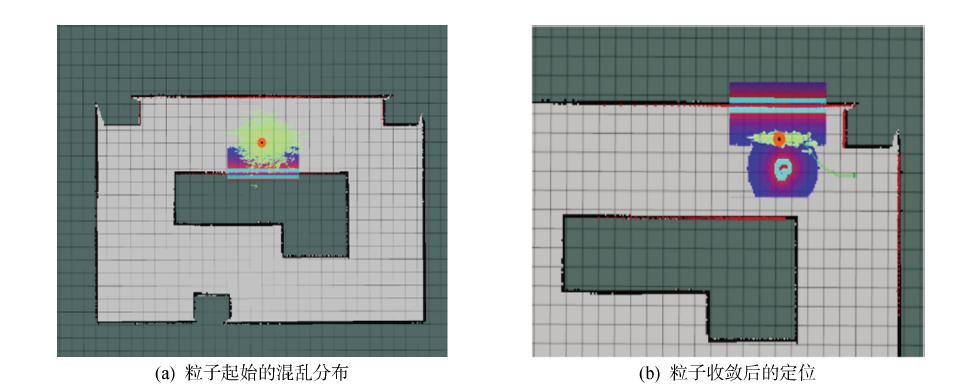
Fig.9
Positioning process of AMCL algorithm applied to collaborative operation of mobile robot


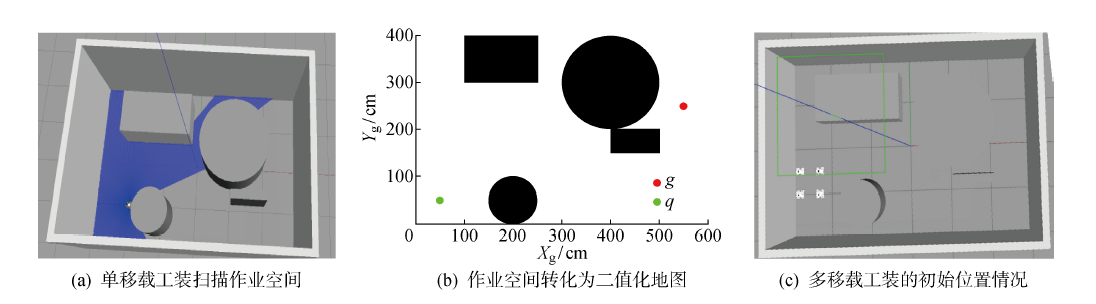
Fig.10
Construction of workspace simulation environment
Tab.1
Technical parameter of transfer tooling
| 物理量 | 取值 |
|---|---|
| 作业空间/m | 40,60 |
| 长、宽、高/mm | 900,700,300 |
| 离地间隙/mm | 20 |
| 雷达距离精度/cm | 2 |
| 雷达距离误差协方差 | 0.001 |
| 雷达角度精度 | <0.5° |
| 雷达角度误差协方差 | 0.0001 |
| 末端精度/cm | ?5 |
| 旋转半径/cm | 0 |
| 队列距离/cm | 25 |
| 速度误差协方差 | 0.01 |
Fig.11
Variation diagram of potential field in workspace of multiple mobile robots
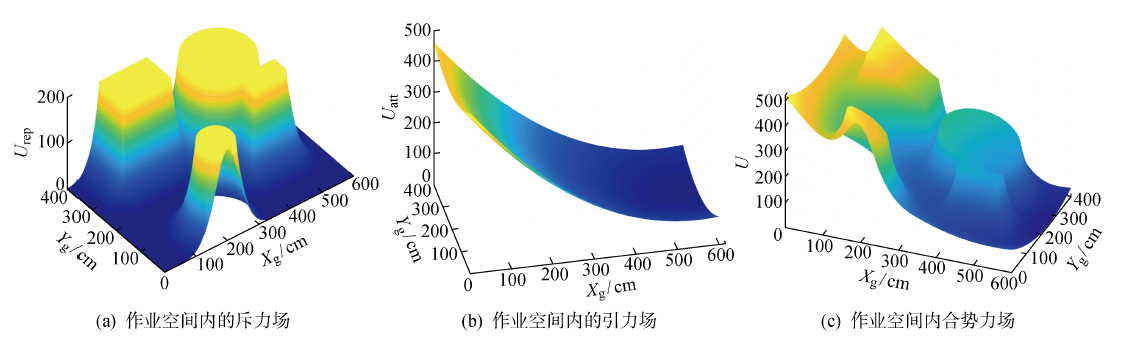

Fig.12
Motion model of differential wheel transfer tooling
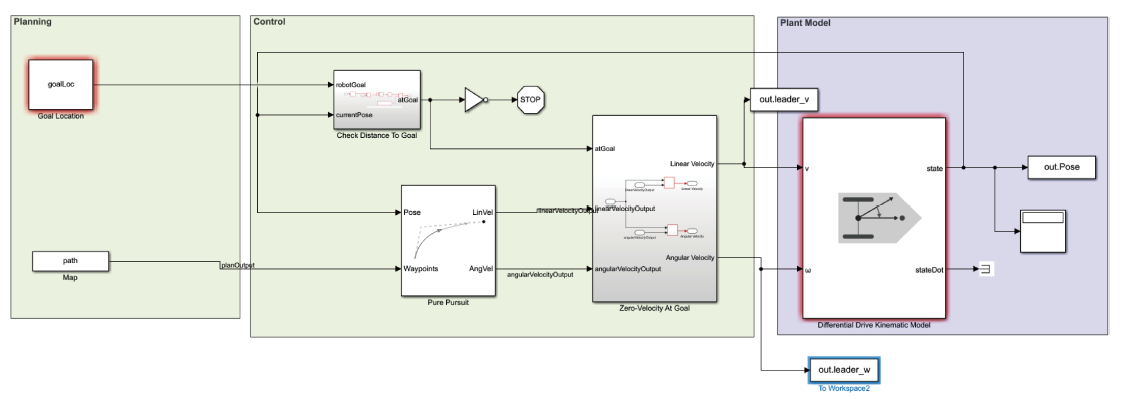

Fig.13
Failed path planning in traditional artificial potential field method

Fig.14
Target path planed by improved artificial potential field method
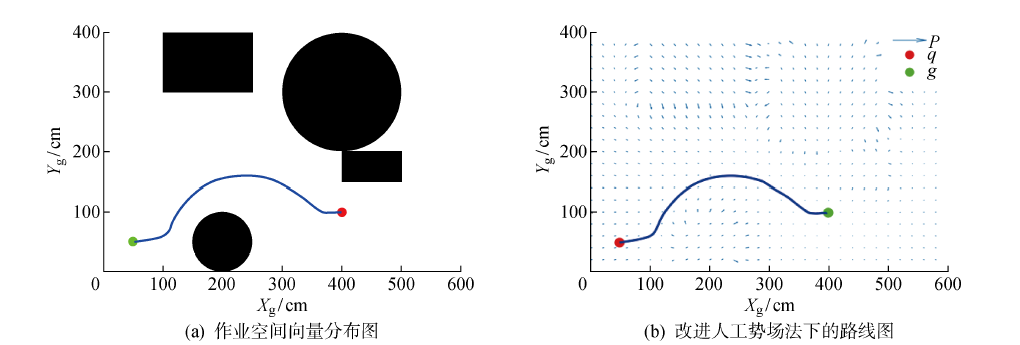
Fig.15
Input movement variables of virtual pilot
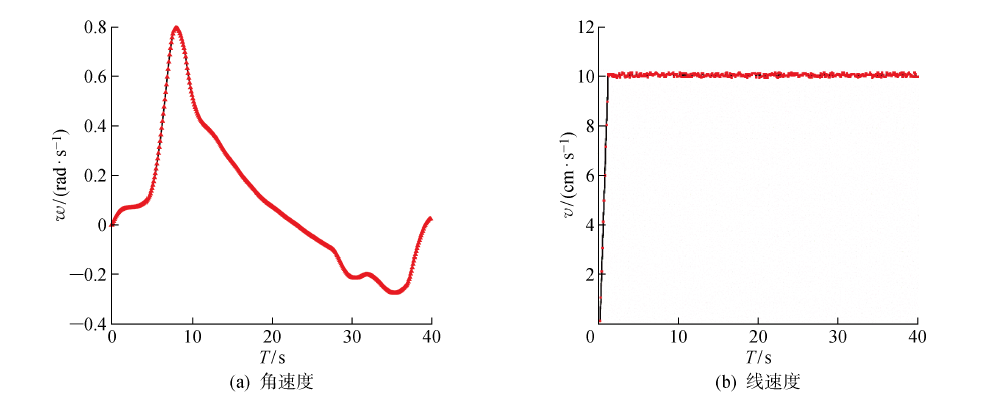

Fig.16
Desired trajectory and error in pure trajectory tracking
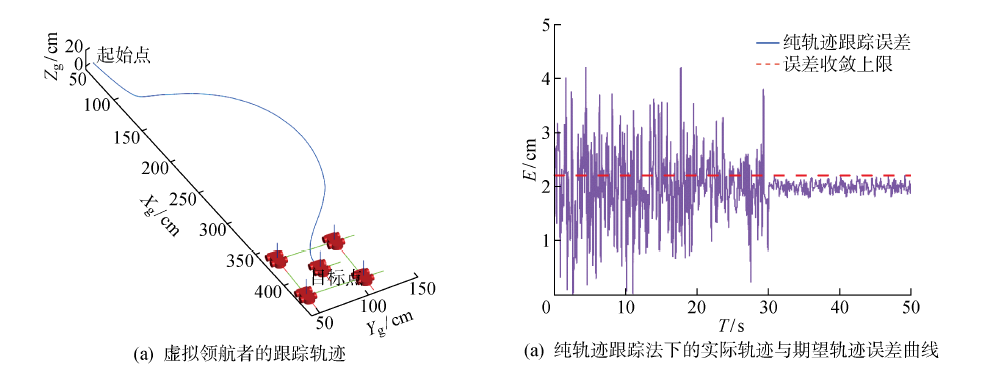

Fig.17
Comparison of error of adaptive Monte Carlo localization method and other methods
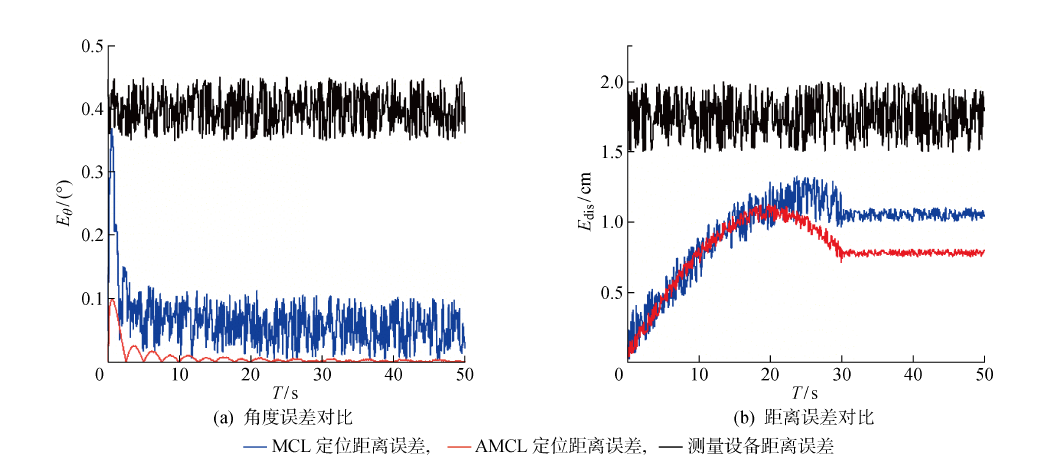
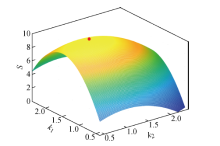
Fig.18
Relationship between backstepping control effect and parameter selection
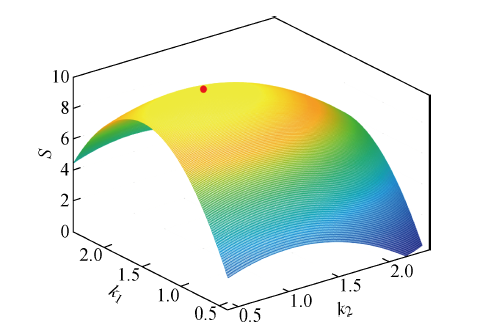
Fig.19
Ideal movement trajectory design of follower
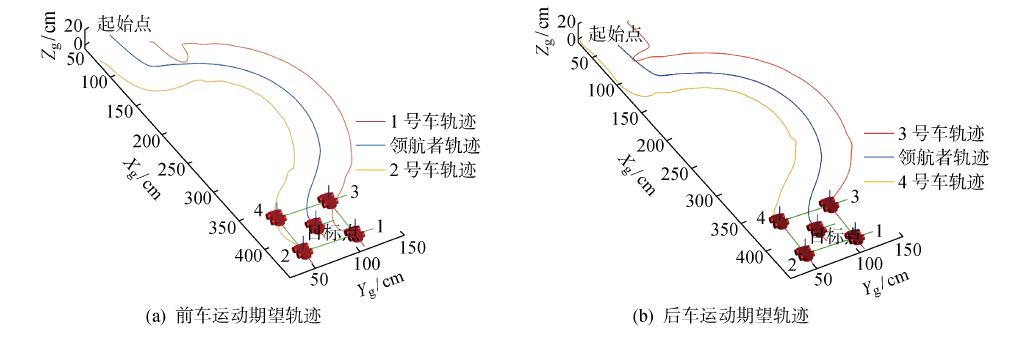
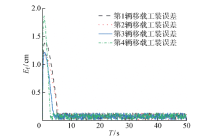
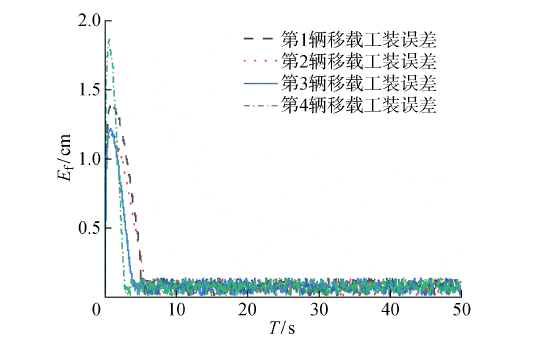
Fig.20
Follower error metric versus time
Tab.2
Track time in three directions of robot follower
| 跟随机 器人编号 | 追踪时间/s | ||
|---|---|---|---|
| X方向 | Y方向 | 角度 | |
| 1 | 3.5021 | 5.5021 | 4.2345 |
| 2 | 4.2987 | 4.2987 | 6.1251 |
| 3 | 2.1342 | 2.1342 | 3.2134 |
| 4 | 3.2342 | 4.9234 | 3.4321 |
| [1] | 朱永国. 飞机大部件自动对接若干关键技术研究[D]. 南京: 南京航空航天大学, 2012. |
| ZHU Yongguo. Research on some key techniques on aircraft large part automatic joining[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2012. | |
| [2] | CHEN X H, JIA Y M, MATSUNO F. Tracking control of nonholonomic mobile robots with velocity and acceleration constraints[C]// 2014 American Control Conference. Portland, USA: IEEE, 2014. |
| [3] | 陈罡, 孟静, 高晓丁, 等. 基于Backstepping方法的移动机器人路径跟踪问题研究[J]. 测控技术, 2016, 35(8): 52-56. |
| CHEN Gang, MENG Jing, GAO Xiaoding, et al. Research on path tracking problem of the mobile robot based on backstepping[J]. Measurement & Control Technology, 2016, 35(8): 52-56. | |
| [4] |
TIAN X H, LIU H L, LIU H T. Robust finite-time consensus control for multi-agent systems with disturbances and unknown velocities[J]. ISA Transactions, 2018, 80: 73-80.
doi: S0019-0578(18)30288-X pmid: 30086828 |
| [5] |
LIU J H, WANG C L, CAI X. Global finite-time event-triggered consensus for a class of second-order multi-agent systems with the power of positive odd rational number and quantized control inputs[J]. Neurocomputing, 2019, 360: 254-264.
doi: 10.1016/j.neucom.2019.05.065 URL |
| [6] |
XUE L X, WU S, XU Y Z, et al. A simulation-based multi-objective optimization design method for pump-driven electro-hydrostatic actuators[J]. Processes, 2019, 7(5): 274.
doi: 10.3390/pr7050274 URL |
| [7] |
SHAO J, XIE G, WANG L. Leader-following formation control of multiple mobile vehicles[J]. IET Control Theory & Applications, 2007, 1(2): 545-552.
doi: 10.1049/iet-cta:20050371 URL |
| [8] | CHI T, ZHANG C J, SONG Y, et al. A strategy of multi-robot formation and obstacle avoidance in unknown environment[C]//2016 IEEE International Conference on Information and Automation. Ningbo, China: IEEE, 2016: 1455-1460. |
| [9] |
REN W, BEARD R W. Decentralized scheme for spacecraft formation flying via the virtual structure approach[J]. Journal of Guidance, Control, and Dynamics, 2004, 27(1): 73-82.
doi: 10.2514/1.9287 URL |
| [10] |
ZHOU D J, WANG Z J, SCHWAGER M. Agile coordination and assistive collision avoidance for quadrotor swarms using virtual structures[J]. IEEE Transactions on Robotics, 2018, 34(4): 916-923.
doi: 10.1109/TRO.2018.2857477 URL |
| [11] | 王树凤, 张钧鑫, 张俊友. 基于人工势场和虚拟领航者的智能车辆编队控制[J]. 上海交通大学学报, 2020, 54(3): 305-311. |
| WANG Shufeng, ZHANG Junxin, ZHANG Junyou. Intelligent vehicles formation control based on artificial potential field and virtual leader[J]. Journal of Shanghai Jiao Tong University, 2020, 54(3): 305-311. | |
| [12] |
BENZERROUK A, ADOUANE L, MARTINET P. Stable navigation in formation for a multi-robot system based on a constrained virtual structure[J]. Robotics and Autonomous Systems, 2014, 62(12): 1806-1815.
doi: 10.1016/j.robot.2014.07.004 URL |
| [13] |
SARAVANAKUMAR S, ASOKAN T. Multipoint potential field method for path planning of autonomous underwater vehicles in 3D space[J]. Intelligent Service Robotics, 2013, 6(4): 211-224.
doi: 10.1007/s11370-013-0138-2 URL |
| [14] |
SINGH Y, SHARMA S, SUTTON R, et al. A constrained A* approach towards optimal path planning for an unmanned surface vehicle in a maritime environment containing dynamic obstacles and ocean currents[J]. Ocean Engineering, 2018, 169: 187-201.
doi: 10.1016/j.oceaneng.2018.09.016 URL |
| [15] |
LAMINI C, BENHLIMA S, ELBEKRI A. Genetic algorithm based approach for autonomous mobile robot path planning[J]. Procedia Computer Science, 2018, 127: 180-189.
doi: 10.1016/j.procs.2018.01.113 URL |
| [16] | PANDEY P, SHUKLA A, TIWARI R. Three-dimensional path planning for unmanned aerial vehicles using glowworm swarm optimization algorithm[J]. International Journal of System Assurance Engineering and Management, 2018, 9(4): 836-852. |
| [17] | 赵国旗, 杨明, 王冰, 等. 基于智能终端的移动机器人室内外无缝定位方法[J]. 上海交通大学学报, 2018, 52(1): 13-19. |
| ZHAO Guoqi, YANG Ming, WANG Bing, et al. Indoor and outdoor seamless positioning method of mobile robot based on intelligent terminal[J]. Journal of Shanghai Jiao Tong University, 2018, 52(1): 13-19. | |
| [18] |
LI T, SUN S, SATTAR T P. Adapting sample size in particle filters through KLD-resampling[J]. Electronics Letters, 2013, 49(12): 740-742.
doi: 10.1049/el.2013.0233 URL |
| [19] |
ANILY S, FEDERGRUEN A. Simulated annealing methods with general acceptance probabilities[J]. Journal of applied probability, 1987, 24(3): 657-667.
doi: 10.2307/3214097 URL |
| [20] | COULTER R C. Implementation of the pure pursuit path tracking algorithm[R]. Pittsburgh, USA: Carnegie-Mellon UNIV Pittsburgh PA Robotics INST, 1992. |
| [1] | ZHOU Tianlong, YAO Fangjing, RAO Weixiong. Target State Estimation Algorithms Under Partially Known State Space Models [J]. Air & Space Defense, 2025, 8(3): 111-122. |
| [2] | JIAO Cong, XU Zhaosheng, LI Wei, TIAN Daogui, CHEN Lian, ZHAO Zheng. Aerial Induced Countermeasure Method Against Distributed Swarms [J]. Air & Space Defense, 2024, 7(4): 114-120. |
| [3] | ZANG Hongyan, XIE Xiaolong, XU Yazhou, TAO Ye, GAO Changsheng. Hypersonic Maneuvering Target State Estimation Algorithm Based on Recurrent Neural Network [J]. Air & Space Defense, 2024, 7(4): 88-98. |
| [4] | MU Jianbin∗ (穆建彬), YANG Haili (杨海丽), HE Defeng (何德峰). CBF-Based Distributed Model Predictive Control for Safe Formation of Autonomous Mobile Robots [J]. J Shanghai Jiaotong Univ Sci, 2024, 29(4): 678-688. |
| [5] | WANG Xianzhi, LI Guofei, CHANG Ya’nan. Distributed Extended State Observer-Based Formation Control of Multiple Flight Vehicles [J]. Journal of Shanghai Jiao Tong University, 2024, 58(11): 1798-1804. |
| [6] | CAO Kai, CHEN Yangquan, LI Kang, CHEN Chaobo, YAN Kun, LIU Weichao. Dynamic Density-Guided Method for Multi-Robot Formation Transformation [J]. Journal of Shanghai Jiao Tong University, 2024, 58(11): 1783-1797. |
| [7] | XU Chenhui, YU Fanghui, HE Defeng. Disturbance-Blocking-Based Distributed Receding Horizon Estimation of Flexible Joint Robots [J]. Journal of Shanghai Jiao Tong University, 2022, 56(7): 868-876. |
| [8] | WU Guanghui, FANG Dongyang, CHEN Yifen, LI Rui, SHAO Xiang. Research on Sliding Mode Guidance Law Based on Immersion and Invariance Estimator [J]. Air & Space Defense, 2021, 4(1): 91-96. |
| [9] | LIU Chen, XIE Baodi, DONG Guobao, HUO Da, DUAN Yuxin, XIA Chuan. Controller Design of the UAV Formation Based on Adaptive Integral Sliding Mode [J]. Air & Space Defense, 2021, 4(1): 65-70. |
| [10] | ZHANG Xianku, HAN Xu. Modeling and Sliding Mode Control for Chaotic Yawing Phenomenon of Large Oil Tanker [J]. Journal of Shanghai Jiao Tong University, 2021, 55(1): 40-47. |
| [11] | WANG Shufeng,ZHANG Junxin,ZHANG Junyou. Intelligent Vehicles Formation Control Based on Artificial Potential Field and Virtual Leader [J]. Journal of Shanghai Jiaotong University, 2020, 54(3): 305-311. |
| [12] | YAN Zheng,KONG Xiangrui,XU Xiaoyuan,XIE Wei. Applications of Micro Synchronous Phasor Measurement Units in State Estimation of Smart Distribution Network [J]. Journal of Shanghai Jiao Tong University, 2018, 52(10): 1195-1205. |
| [13] | ZHAN Yongxiang1,LONG Xiaobo2,YAO Hailin1,ZHANG Jingbo3,CHEN Yu4. The Control of Resilient Modulus of Soft Rock as Filling Material for#br# Subgrade Based on Dynamic Deformation Control Method [J]. Journal of Shanghai Jiao Tong University, 2017, 51(4): 450-. |
| [14] | LI Xiongjie1,2,ZHOU Donghua2. Fault Diagnosis Based on Particle Filter for Hybrid System [J]. Journal of Shanghai Jiaotong University, 2015, 49(06): 849-854. |
| [15] | DUAN Wei-Dang-1, YUAN Cheng-Hai-2, ZHENG Wen-Bo-3, SHI Zhan-4, CAI Yong-Chang-3. Optimal Analysis of Construction Schemes for Urban Shallow-Buried Multi-arch Tunnel by Single-Tunnel Method [J]. Journal of Shanghai Jiaotong University, 2012, 46(01): 99-104. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||