上海交通大学学报 ›› 2024, Vol. 58 ›› Issue (5): 776-782.doi: 10.16183/j.cnki.jsjtu.2022.224
• 新型电力系统与综合能源 • 上一篇
李翠明( ), 王华, 徐龙儿, 王龙
), 王华, 徐龙儿, 王龙
收稿日期:2022-06-17
修回日期:2022-07-30
接受日期:2022-10-17
出版日期:2024-05-28
发布日期:2024-06-17
作者简介:李翠明(1976-),副教授,主要从事移动机器人场景理解和导航方面的研究;E-mail: li_goddess@163.com.
基金资助:
LI Cuiming(), WANG Hua, XU Longer, WANG Long
Received:2022-06-17
Revised:2022-07-30
Accepted:2022-10-17
Online:2024-05-28
Published:2024-06-17
摘要:
针对移动清洁机器人在光伏电站作业时需要精确快速识别道路的问题,提出一种改进的DeepLabv3+目标识别模型对光伏电站道路进行识别.首先,将原DeepLabv3+模型的主干网络替换为优化的MobileNetv2网络以降低模型复杂度;其次,采用异感受野融合和空洞深度可分离卷积结合的策略改进空洞空间金字塔池化(ASPP)结构,提高ASPP的信息利用率和模型训练效率;最后,引入注意力机制,提升模型识别精度.结果表明,改进后模型的平均像素准确率为98.06%,平均交并比为95.92%,相比于DeepLabv3+基础模型分别提高了1.79个百分点、2.44个百分点,且高于SegNet、UNet模型.同时,改进后的模型参数量小,实时性好,能够更好地实现光伏电站移动清洁机器人的道路识别.
中图分类号:
李翠明, 王华, 徐龙儿, 王龙. 基于改进DeepLabv3+的光伏电站道路识别方法[J]. 上海交通大学学报, 2024, 58(5): 776-782.
LI Cuiming, WANG Hua, XU Longer, WANG Long. Road Recognition Method of Photovoltaic Plant Based on Improved DeepLabv3+[J]. Journal of Shanghai Jiao Tong University, 2024, 58(5): 776-782.
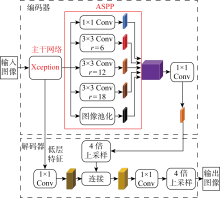
图1
DeepLabv3+基础模型的网络结构
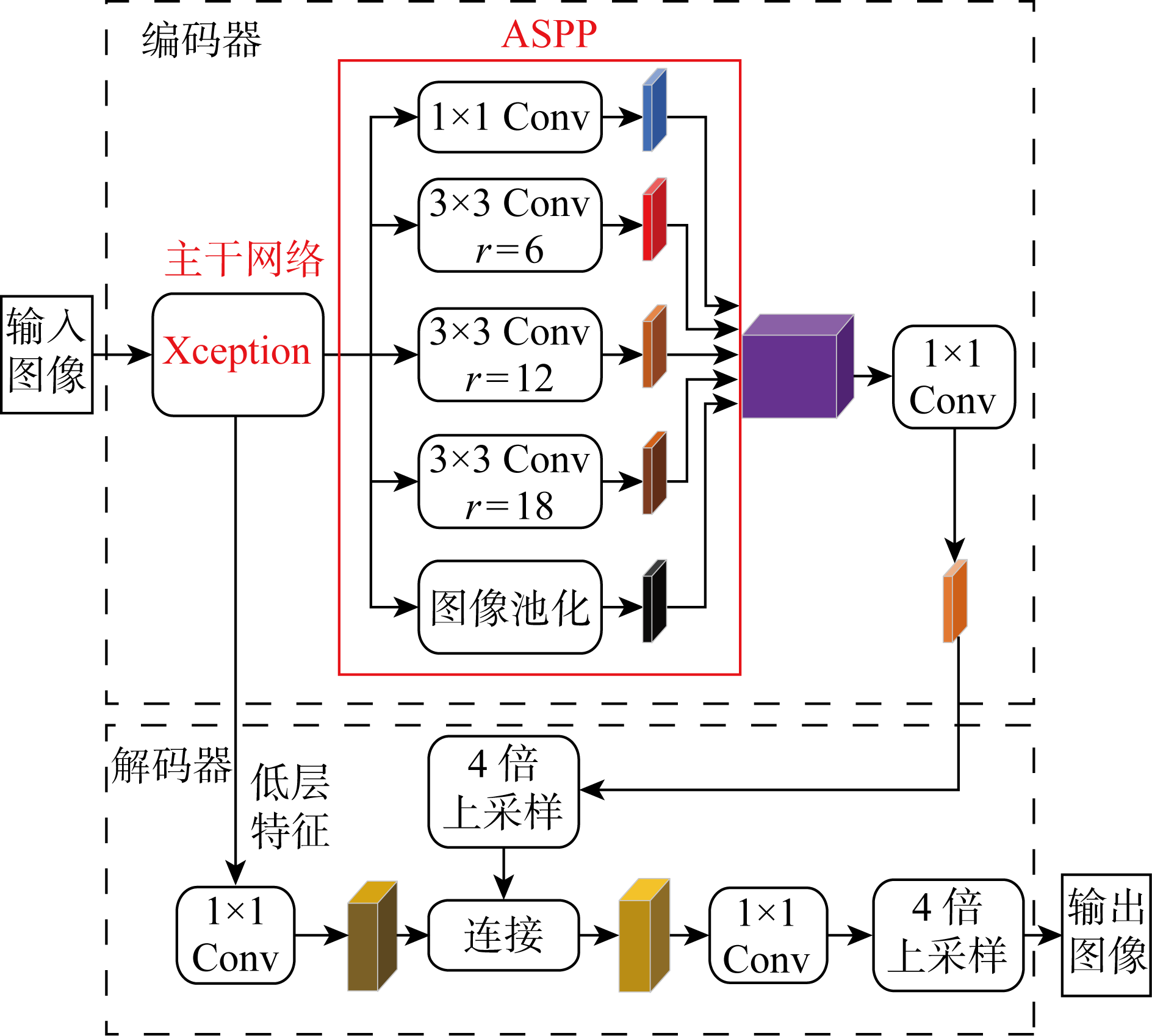
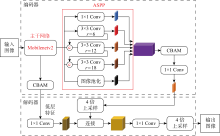
图2
改进DeepLabv3+模型的网络结构
表1
优化的MobileNetv2网络结构
| 输入 | 网络层 | 输出步长 | t | c | n | s | r |
|---|---|---|---|---|---|---|---|
| 224×224×3 | conv2d | 2 | — | 32 | 1 | 2 | 1 |
| 112×112×32 | bottleneck | 2 | 1 | 16 | 1 | 1 | 1 |
| 112×112×16 | bottleneck | 4 | 6 | 24 | 2 | 2 | 1 |
| 56×56×24 | bottleneck | 8 | 6 | 32 | 3 | 2 | 1 |
| 28×28×32 | bottleneck | 16 | 6 | 64 | 4 | 2 | 1 |
| 28×28×64 | bottleneck | 16 | 6 | 96 | 3 | 1 | 1 |
| 14×14×96 | bottleneck | 16 | 6 | 160 | 3 | 1 | 2 |
| 7×7×160 | bottleneck | 16 | 6 | 320 | 1 | 1 | 4 |
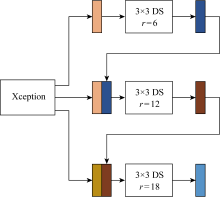
图3
异感受野融合的空洞深度可分离卷积
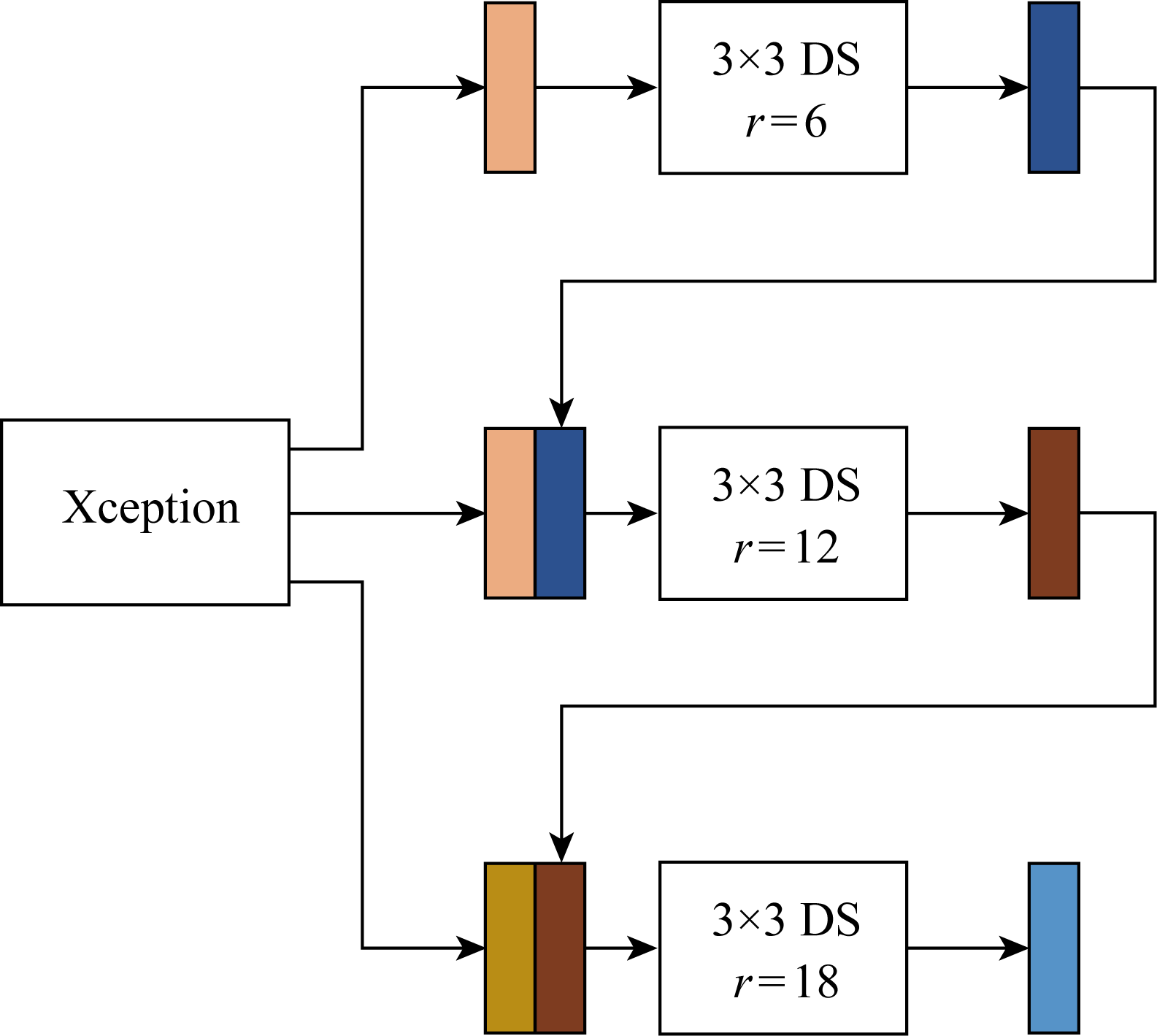
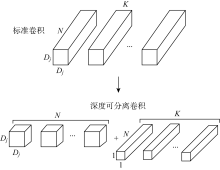
图4
标准卷积与深度可分离卷积
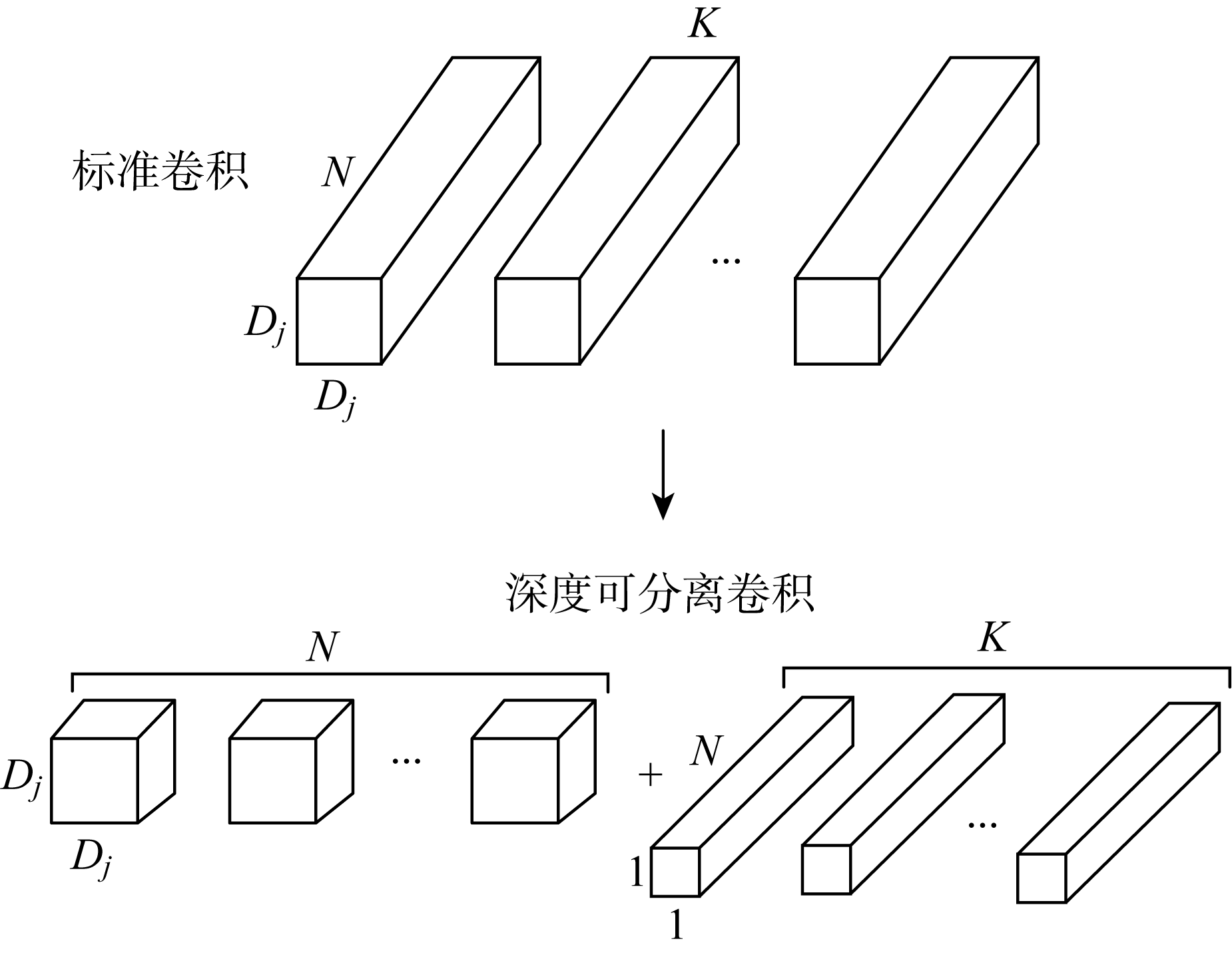
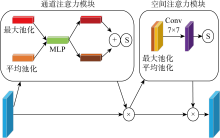
图5
CBAM结构
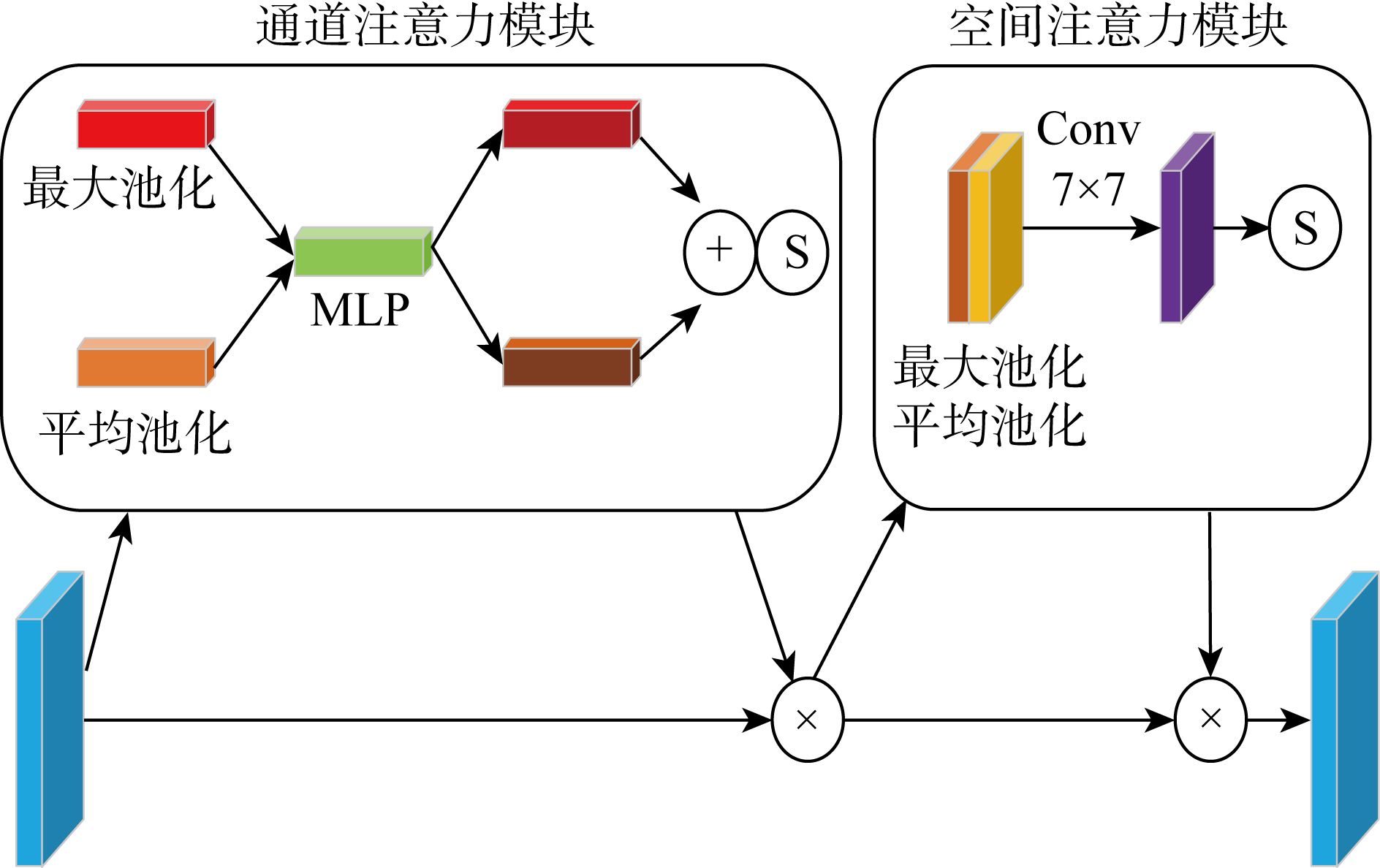
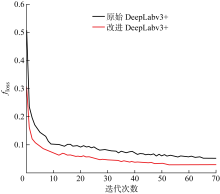
图6
损失函数变化曲线
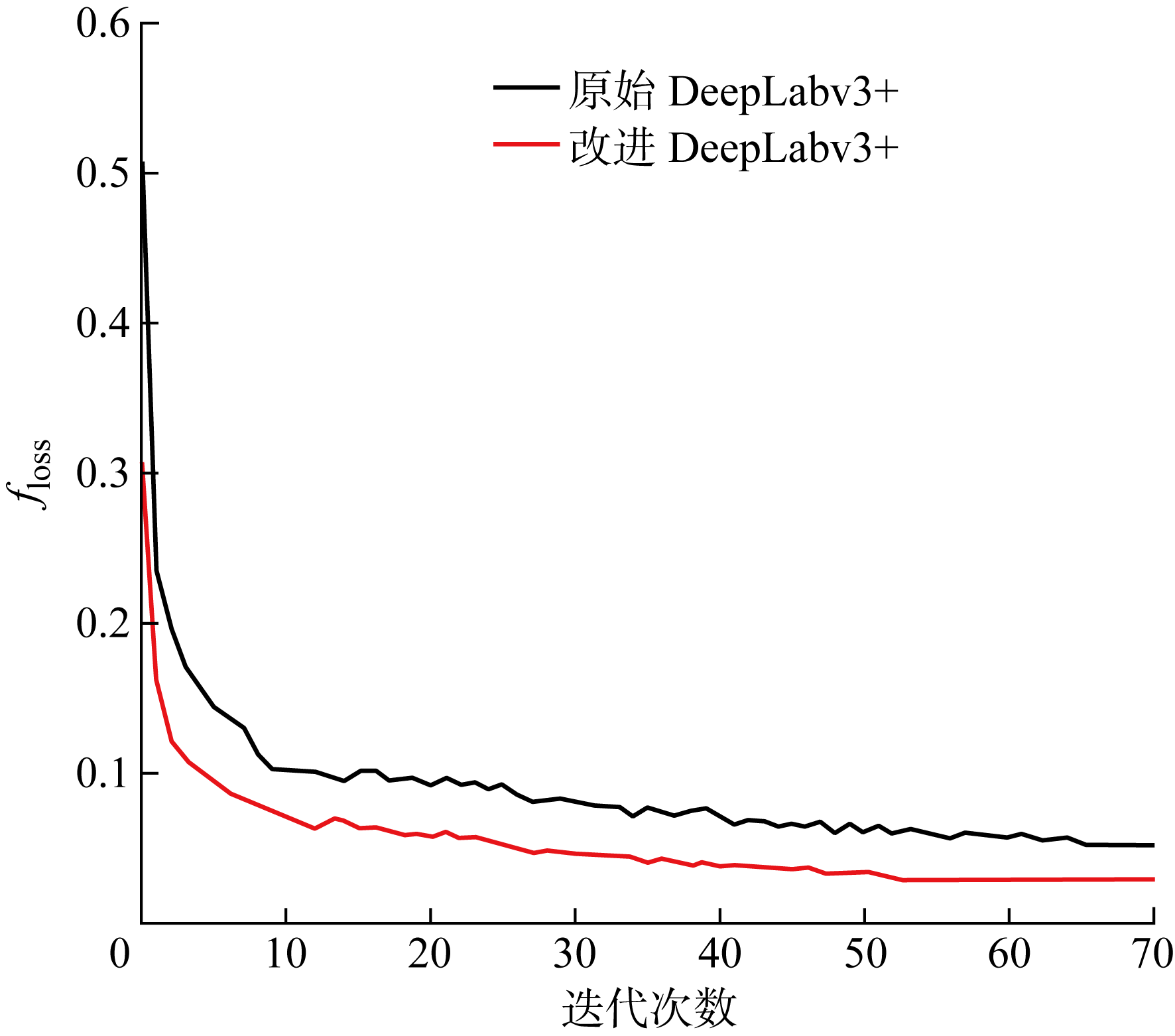
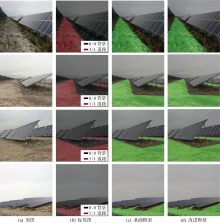
图7
改进DeepLabv3+模型与基础模型的分割效果对比
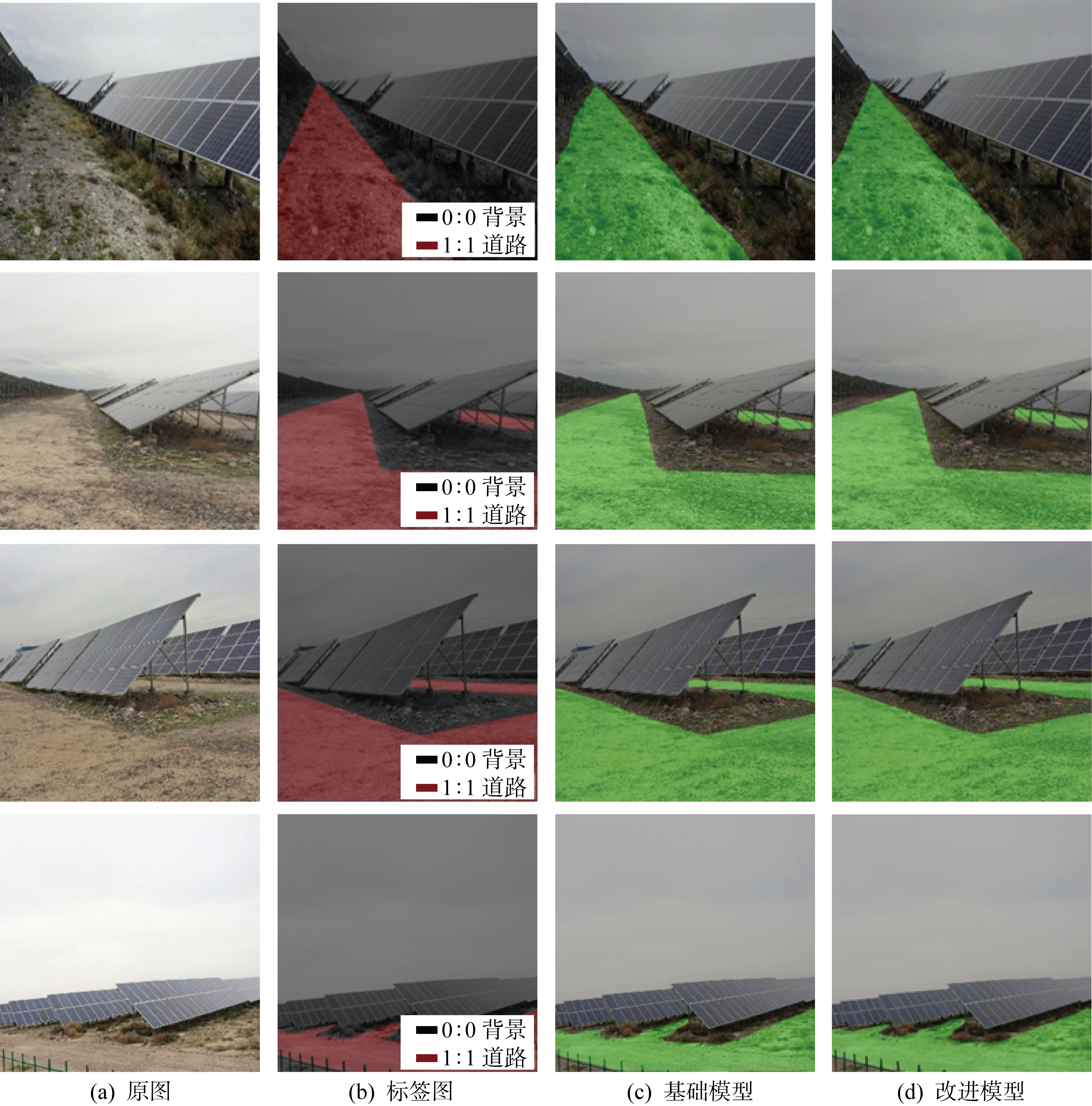
表2
不同模型的精度、参数量和推理时间对比
| 模型 | MPA/% | MIoU/% | 单张图片 推理时间/ms | 总参数量× 10-6 |
|---|---|---|---|---|
| SegNet | 93.84 | 91.42 | 121 | 14.86 |
| UNet | 94.73 | 92.05 | 125 | 17.30 |
| 原始Deeplabv3+ | 96.27 | 93.48 | 156 | 41.25 |
| 改进Deeplabv3+ | 98.06 | 95.92 | 112 | 2.28 |
| [1] |
KONG H, AUDIBERT J Y, PONCE J. General road detection from a single image[J]. IEEE Transactions on Image Processing, 2010, 19(8): 2211-2220.
doi: 10.1109/TIP.2010.2045715 pmid: 20371404 |
| [2] | 方浩, 贾睿, 卢嘉鹏. 基于颜色和纹理特征的道路图像分割[J]. 北京理工大学学报, 2010, 30(8): 934-939. |
| FANG Hao, JIA Rui, LU Jiapeng. Segmentation of full vision images based on colour and texture features[J]. Transactions of Beijing Institute of Technology, 2010, 30(8): 934-939. | |
| [3] | 吴骅跃, 段里仁. 基于RGB熵和改进区域生长的非结构化道路识别方法[J]. 吉林大学学报(工学版), 2019, 49(3): 727-735. |
| WU Huayue, DUAN Liren. Unstructured road detection method based on RGB entropy and improved region growing[J]. Journal of Jilin University (Engineering and Technology Edition), 2019, 49(3): 727-735. | |
| [4] |
SHELHAMER E, LONG J, DARRELL T. Fully convolutional networks for semantic segmentation[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(4): 640-651.
doi: 10.1109/TPAMI.2016.2572683 pmid: 27244717 |
| [5] |
BADRINARAYANAN V, KENDALL A, CIPOLLA R. SegNet: A deep convolutional encoder-decoder architecture for image segmentation[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(12): 2481-2495.
doi: 10.1109/TPAMI.2016.2644615 pmid: 28060704 |
| [6] | RONNEBERGER O, FISCHER P, BROX T. UNet: Convolutional networks for biomedical image segmentation[C]// International Conference on Medical Image Computing and Computer-Assisted Intervention. Cham, Switzerland: Springer, 2015: 234-241. |
| [7] | ZHAO H S, SHI J P, QI X J, et al. Pyramid scene parsing network[C]// 2017 IEEE Conference on Computer Vision and Pattern Recognition. Honolulu, USA: IEEE, 2017: 6230-6239. |
| [8] | CHEN L C, ZHU Y K, PAPANDREOU G, et al. Encoder-decoder with atrous separable convolution for semantic image segmentation[C]// Proceedings of the European Conference on Computer Vision. Cham, Switzerland: Springer, 2018: 833-851. |
| [9] | CHEN L C, PAPANDREOU G, SCHROFF F, et al. Rethinking atrous convolution for semantic image segmentation[EB/OL]. (2017-01-01) [2021-04-08]. https://arxiv.org/abs/1706.05587. |
| [10] | CHOLLET F. Xception: Deep learning with depthwise separable convolutions[C]// IEEE Conference on Computer Vision and Pattern Recognition. Honolulu, USA: IEEE, 2017: 1251-1258. |
| [11] | BAHETI B, INNANI S, GAJRE S, et al. Semantic scene segmentation in unstructured environment with modified DeepLabV3+[J]. Pattern Recognition Letters, 2020, 138: 223-229. |
| [12] | LIU R R, HE D Z. Semantic segmentation based on Deeplabv3+ and attention mechanism[C]// 2021 IEEE 4th Advanced Information Management, Communicates, Electronic and Automation Control Conference. Chongqing, China: IEEE, 2021: 255-259. |
| [13] | SANDLER M, HOWARD A, ZHU M L, et al.MobileNetV2: Inverted residuals and linear bottle-necks[C]// IEEE Conference on Computer Vision and Pattern Recognition. Salt Lake, USA: IEEE, 2018: 4510-4520. |
| [14] | HOWARD A G, ZHU M L, CHEN B, et al. MobileNets: Efficient convolutional neural networks for mobile vision applications[EB/OL]. (2017-04-17)[2021-04-08]. https://arxiv.org/abs/1704.04861. |
| [15] | WOO S, PARK J, LEE J Y, et al. CBAM: Convolutional block attention module[C]// Proceedings of the European Conference on Computer Vision. Cham, Switzerland: Springer, 2018: 3-19. |
| [1] | . 用于水下图像增强的全局密集双分支级联网络[J]. J Shanghai Jiaotong Univ Sci, 2026, 31(2): 458-474. |
| [2] | . 改进DeepLabv3+的高分辨率遥感图像分割方法[J]. J Shanghai Jiaotong Univ Sci, 2026, 31(2): 348-358. |
| [3] | 刘轩, 兰晓宸, 徐大鹏, 何良, 刘茂珅. 基于深度学习时序特征增强的海杂波抑制方法[J]. 空天防御, 2026, 9(1): 36-45. |
| [4] | . 基于多注意力机制的轻量化人体姿态估计[J]. J Shanghai Jiaotong Univ Sci, 2025, 30(5): 899-910. |
| [5] | . 基于多特征提取方法的多场景烟雾检测[J]. J Shanghai Jiaotong Univ Sci, 2025, 30(5): 866-879. |
| [6] | . 基于ALBERT的中国诗酒文化命名实体识别[J]. J Shanghai Jiaotong Univ Sci, 2025, 30(5): 1065-1072. |
| [7] | . CenterLineFormer:基于单车载相机的车道中心线生成方法[J]. J Shanghai Jiaotong Univ Sci, 2025, 30(5): 1009-1017. |
| [8] | . 迁移学习和注意机制融合用于CT图像COVID-19病灶分割的计算机辅助诊断[J]. J Shanghai Jiaotong Univ Sci, 2025, 30(3): 566-581. |
| [9] | 王可, 刘奕阳, 杨杰, 鲁爱国, 李哲, 徐明亮. 基于自适应特征增强和融合的舰载机着舰拉制状态识别[J]. 上海交通大学学报, 2025, 59(2): 274-282. |
| [10] | 汪维, 阮雅端, 顾鹏, 陈启美. 基于融合注意力机制DAUNet的最大裂缝宽度计算[J]. 上海交通大学学报, 2025, 59(12): 1866-1877. |
| [11] | 李楚晨, 唐善军, 赵冰青. 一种基于无人机探测图像区块信息的弱小目标检测算法[J]. 空天防御, 2025, 8(1): 41-47. |
| [12] | 徐旺旺1,2,许良凤1,2,刘宁徽3,律娜3. 基于多注意力卷积神经网络的乳腺癌组织学图像诊断[J]. J Shanghai Jiaotong Univ Sci, 2025, 30(1): 91-106. |
| [13] | 丁黎辉1, 2, 付立军1, 3, 杨光4, 5, 6, 万林4, 5, 常志军7. 基于视频的婴儿癫痫性痉挛综合征检测:建模、检测与评估[J]. J Shanghai Jiaotong Univ Sci, 2025, 30(1): 1-9. |
| [14] | 李利娟, 刘海, 刘红良, 张青松, 陈永东. 融合外部注意力机制的序列到点非侵入式负荷分解[J]. 上海交通大学学报, 2024, 58(6): 846-854. |
| [15] | 周成, 蒋祖华. 融入优质主题和注意力机制的设计规范命名实体识别方法[J]. J Shanghai Jiaotong Univ Sci, 2024, 29(6): 1169-1180. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||