上海交通大学学报 ›› 2024, Vol. 58 ›› Issue (11): 1644-1653.doi: 10.16183/j.cnki.jsjtu.2023.121
何宇1, 欧阳子路1, 邹璐1,2( ), 陈伟民3, 邹早建1,2
), 陈伟民3, 邹早建1,2
收稿日期:2023-04-03
修回日期:2023-05-29
接受日期:2023-07-03
出版日期:2024-11-28
发布日期:2024-12-02
通讯作者:
邹 璐,副教授,博士生导师,电话(Tel.):021-34208149;E-mail: 作者简介:何 宇(2000—),硕士生,现主要从事船舶运动控制研究.
基金资助:
HE Yu1, OUYANG Zilu1, ZOU Lu1,2(), CHEN Weimin3, ZOU Zaojian1,2
Received:2023-04-03
Revised:2023-05-29
Accepted:2023-07-03
Online:2024-11-28
Published:2024-12-02
摘要:
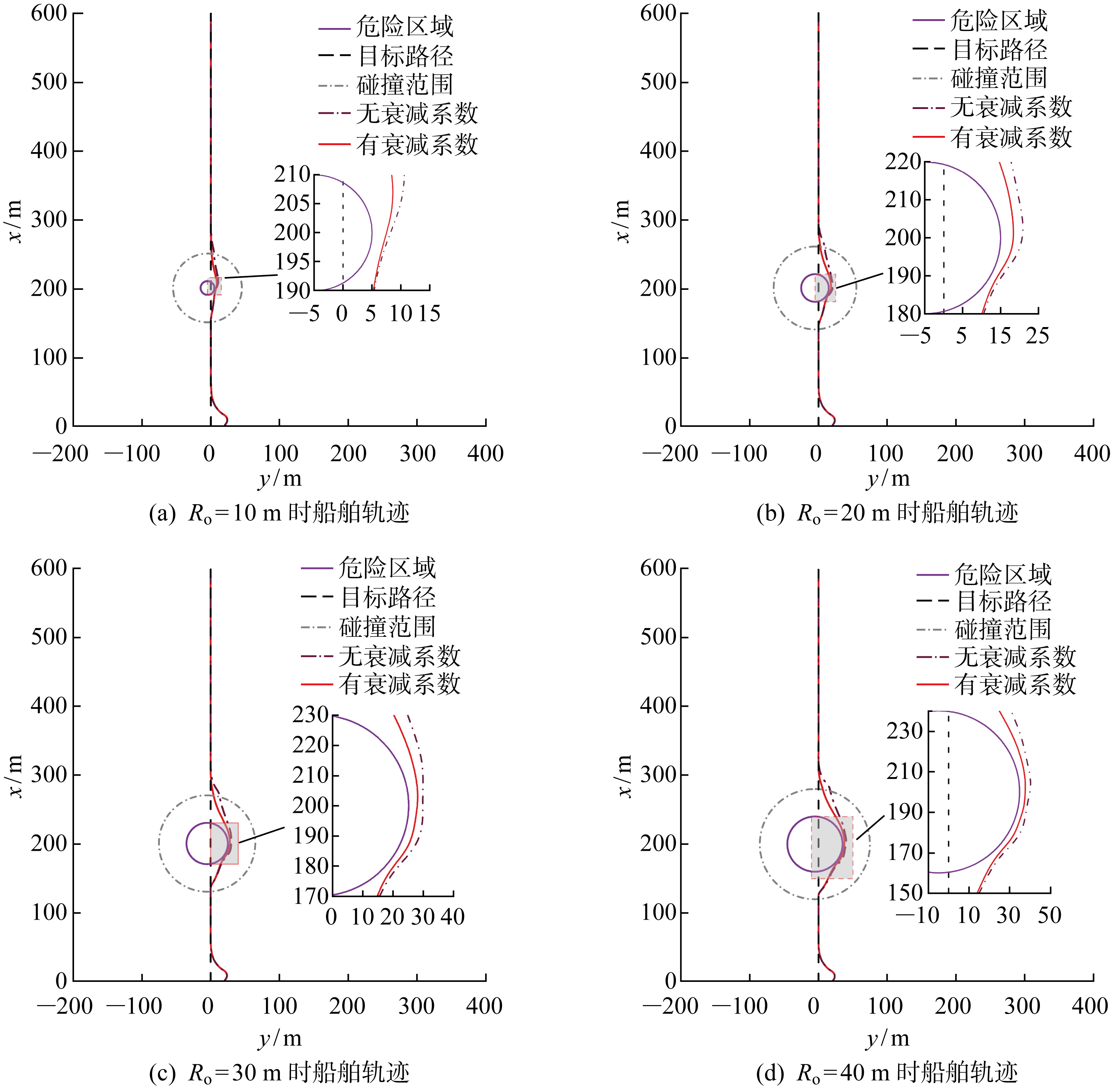
为提高船舶路径跟踪和避碰效果,提出了一种基于矢量场制导法的模型预测控制方法.首先,采用矢量场制导算法将船舶的路径跟踪和船舶避碰问题转换为航向控制问题;然后,采用一阶 Nomoto 响应模型作为模型预测控制的动力学模型,考虑船舶的舵角输入受限问题,引入干扰观测器对模型误差项和环境扰动进行补偿,并应用Lyapunov理论证明了所设计的路径跟踪控制系统的稳定性;最后,设计了基于矢量场制导法的避碰策略,使船舶在路径跟踪的过程中同时完成自主避碰.仿真计算结果表明,开发的方法可以使船舶在波浪干扰作用下准确地跟踪目标路径并有效实现避碰.
中图分类号:
何宇, 欧阳子路, 邹璐, 陈伟民, 邹早建. 基于矢量场制导法和模型预测控制的船舶路径跟踪与避碰[J]. 上海交通大学学报, 2024, 58(11): 1644-1653.
HE Yu, OUYANG Zilu, ZOU Lu, CHEN Weimin, ZOU Zaojian. Ship Path Following and Collision Avoidance Based on Vector Field Guidance Law and Model Predictive Control[J]. Journal of Shanghai Jiao Tong University, 2024, 58(11): 1644-1653.
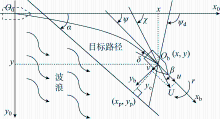
图1
船舶平面位置与运动参数
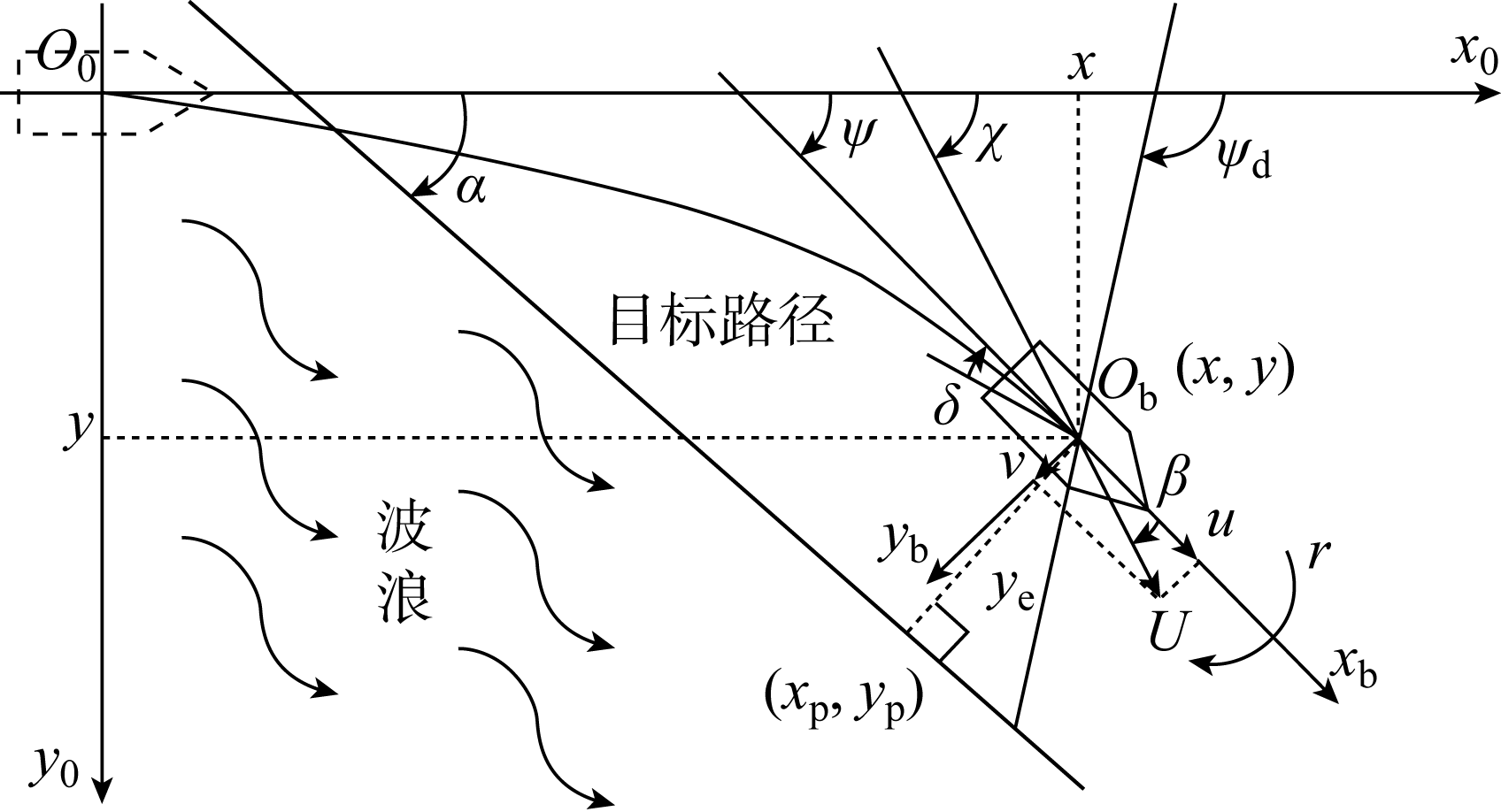
图2
目标路径(红线)周围的矢量场
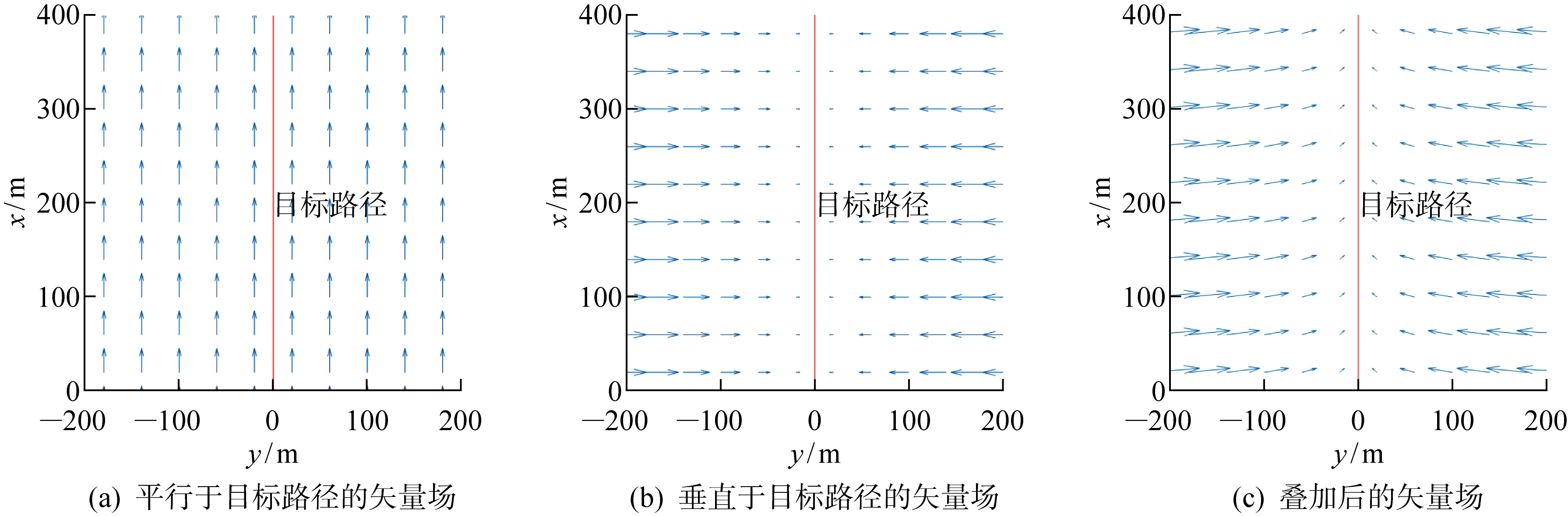
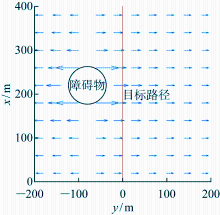
图3
障碍物产生的矢量场
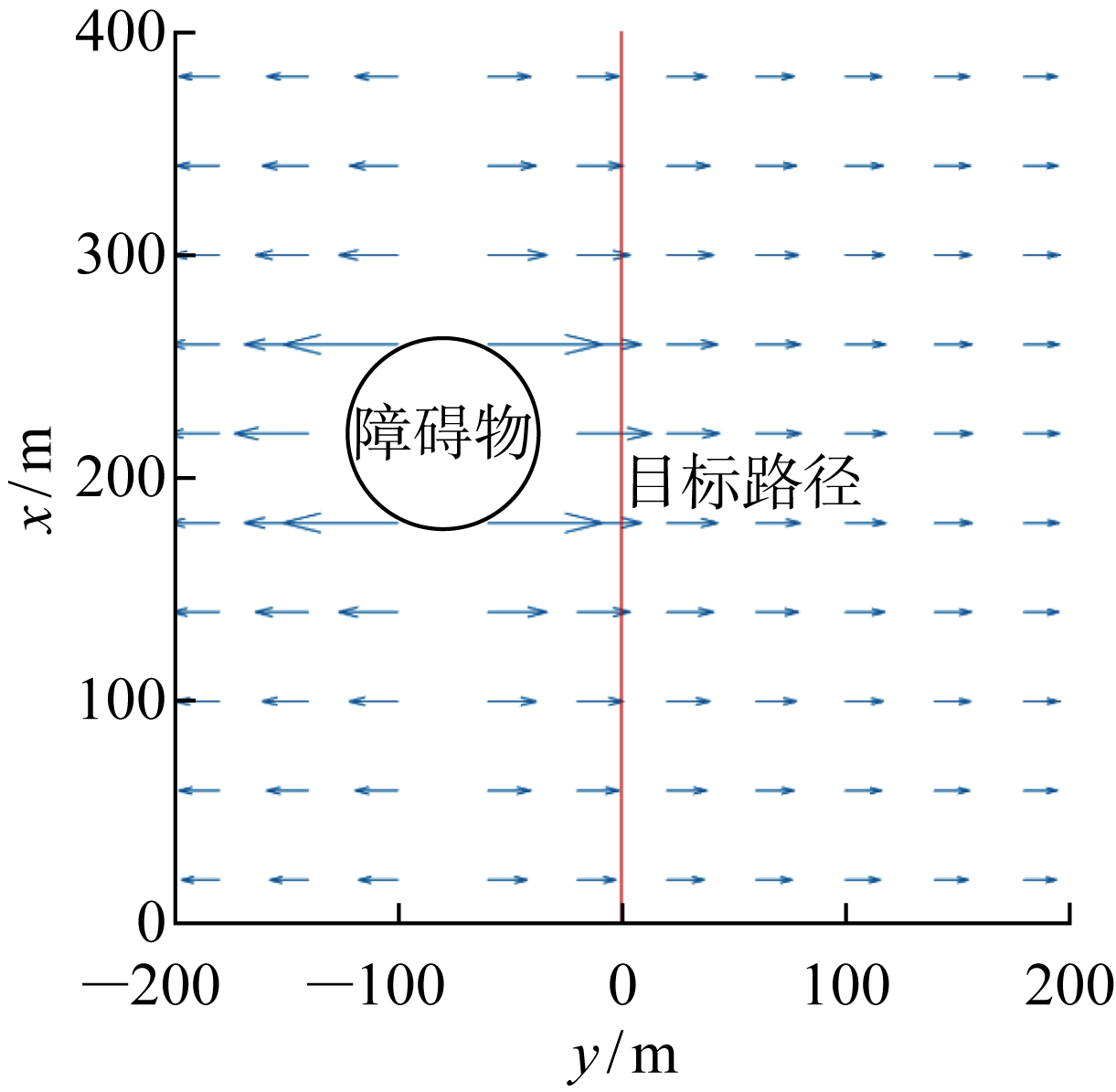
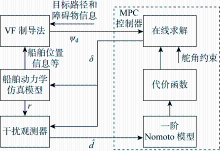
图4
控制器结构
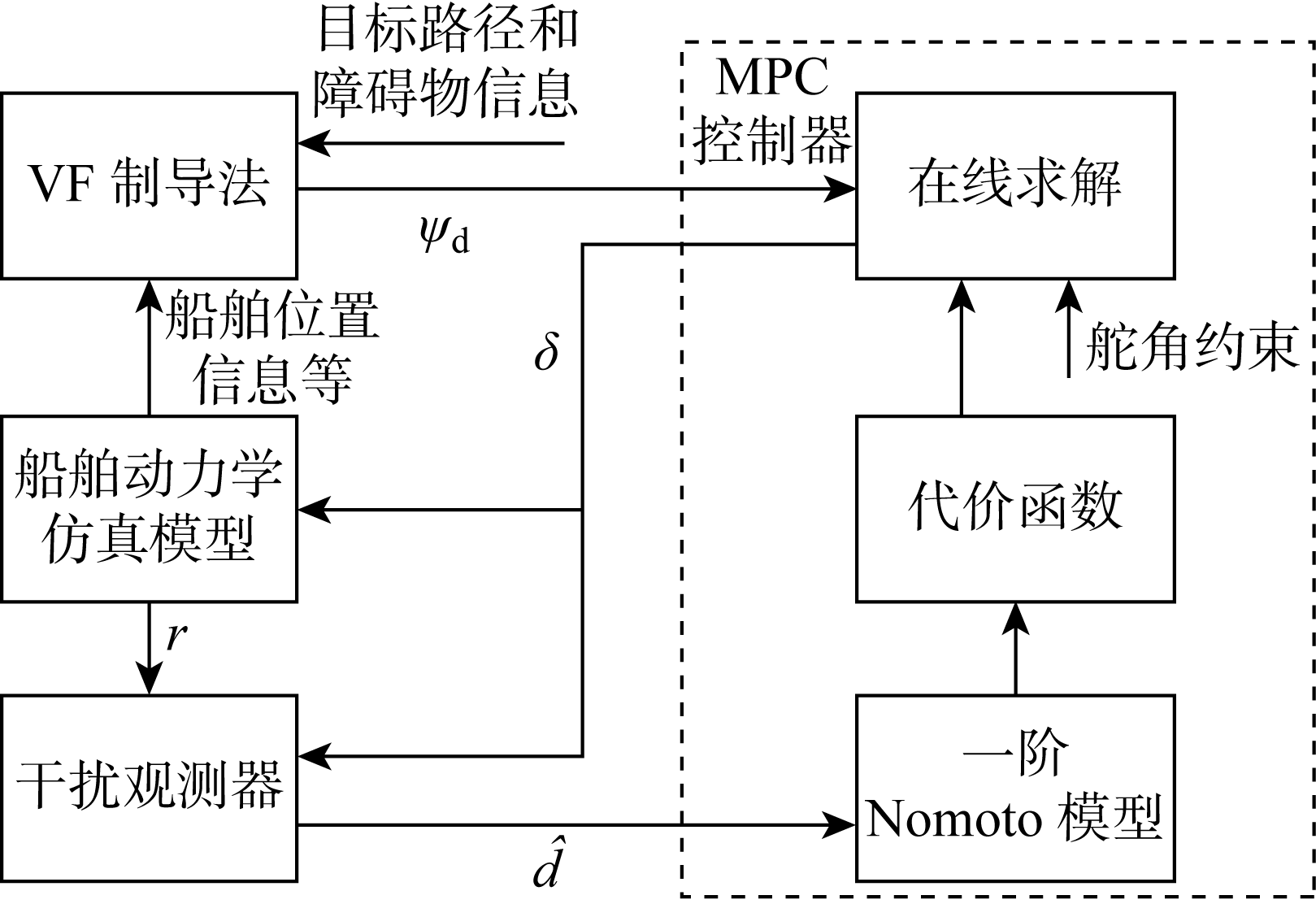
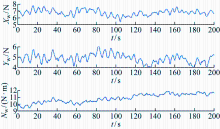
图5
作用在船舶上的波浪力(矩)
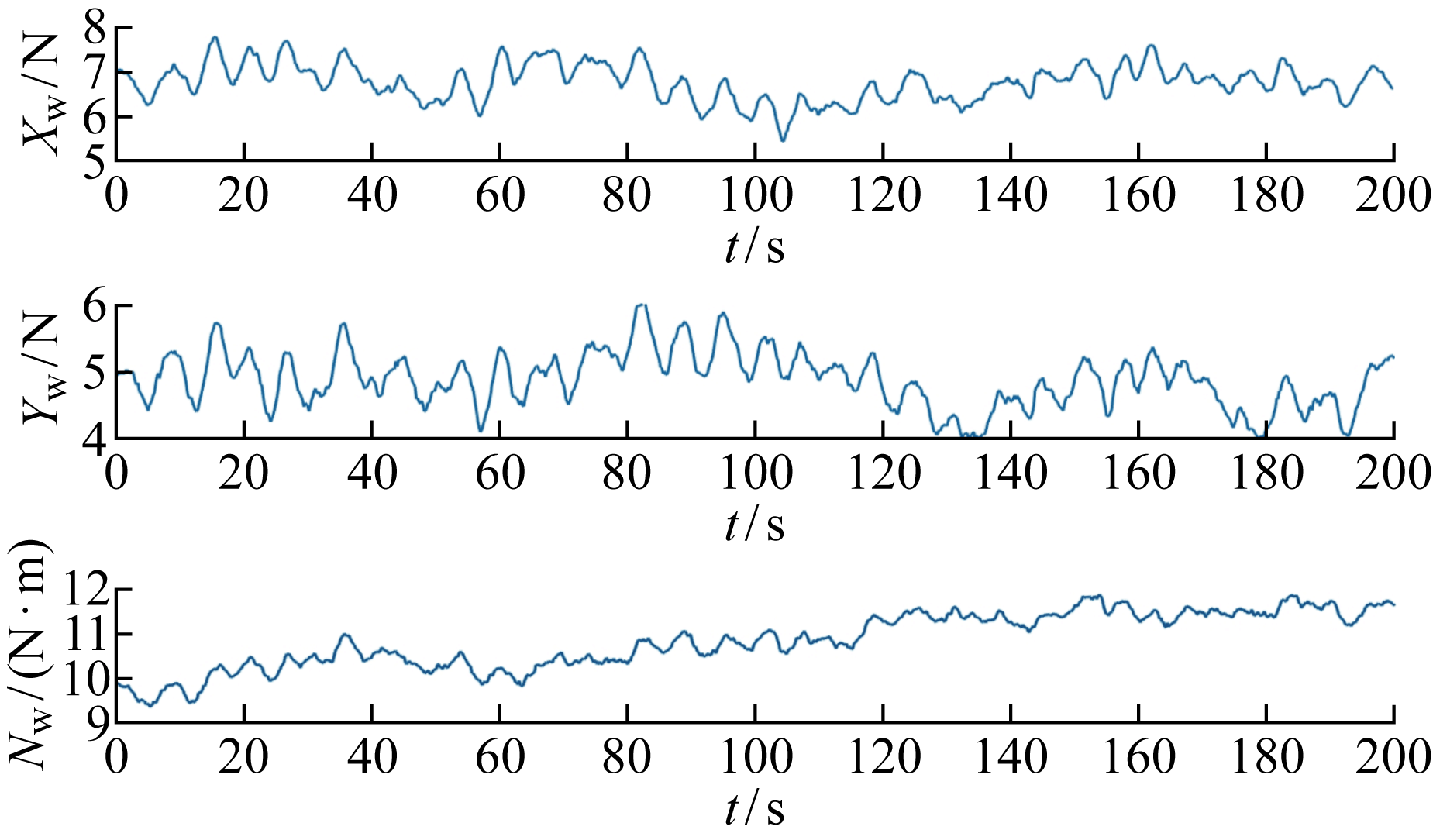
图6
船舶航向控制仿真结果
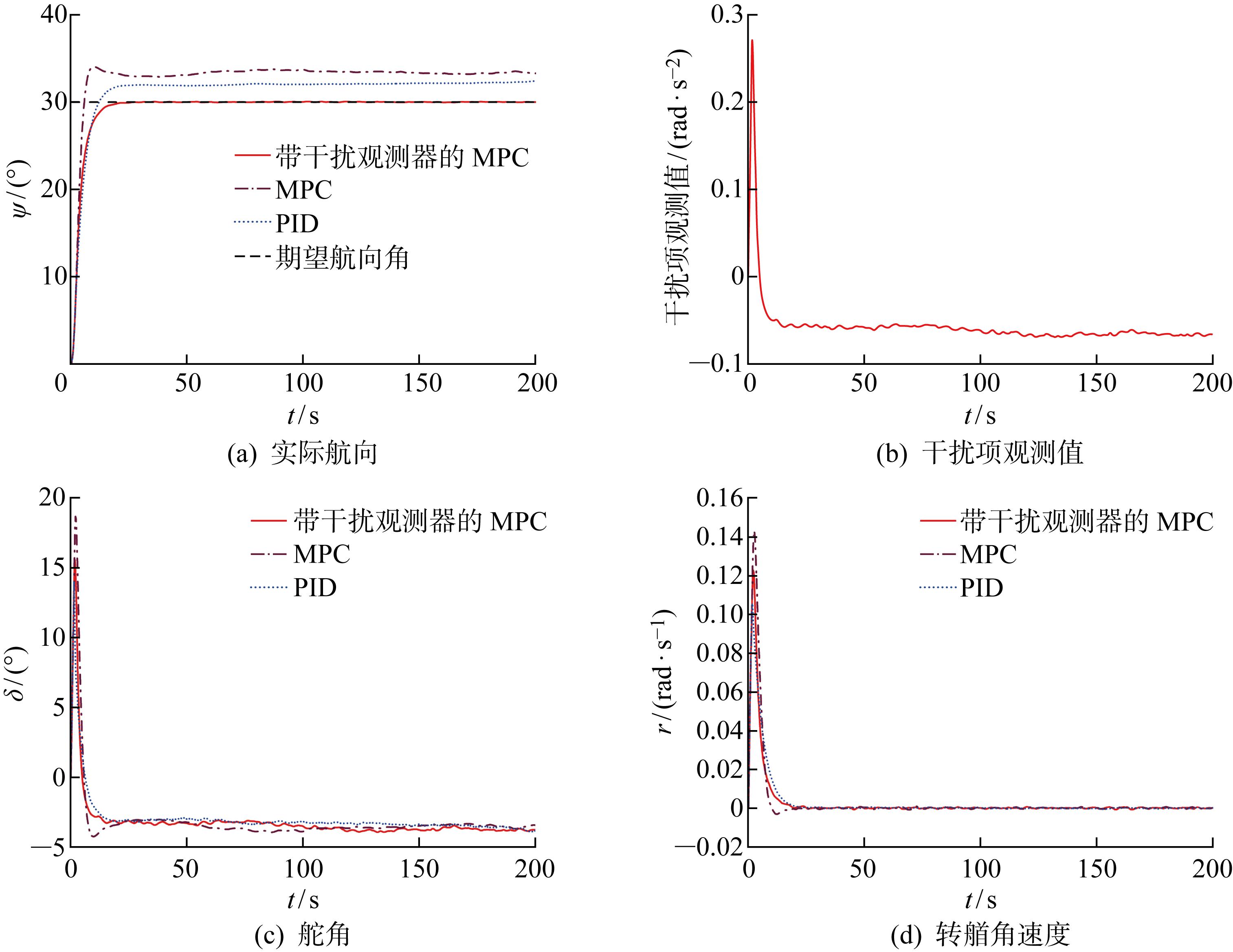
表1
航向控制仿真结果对比
| 控制方法 | 航向角的 RMSE/(°) | 航向角 稳态误差/(°) |
|---|---|---|
| 带干扰观测器的MPC | 0.61 | 0 |
| MPC | 2.84 | 3.44 |
| PID | 1.28 | 2.10 |
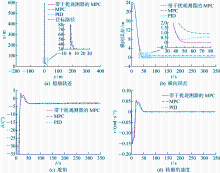
图7
船舶路径跟踪控制仿真结果
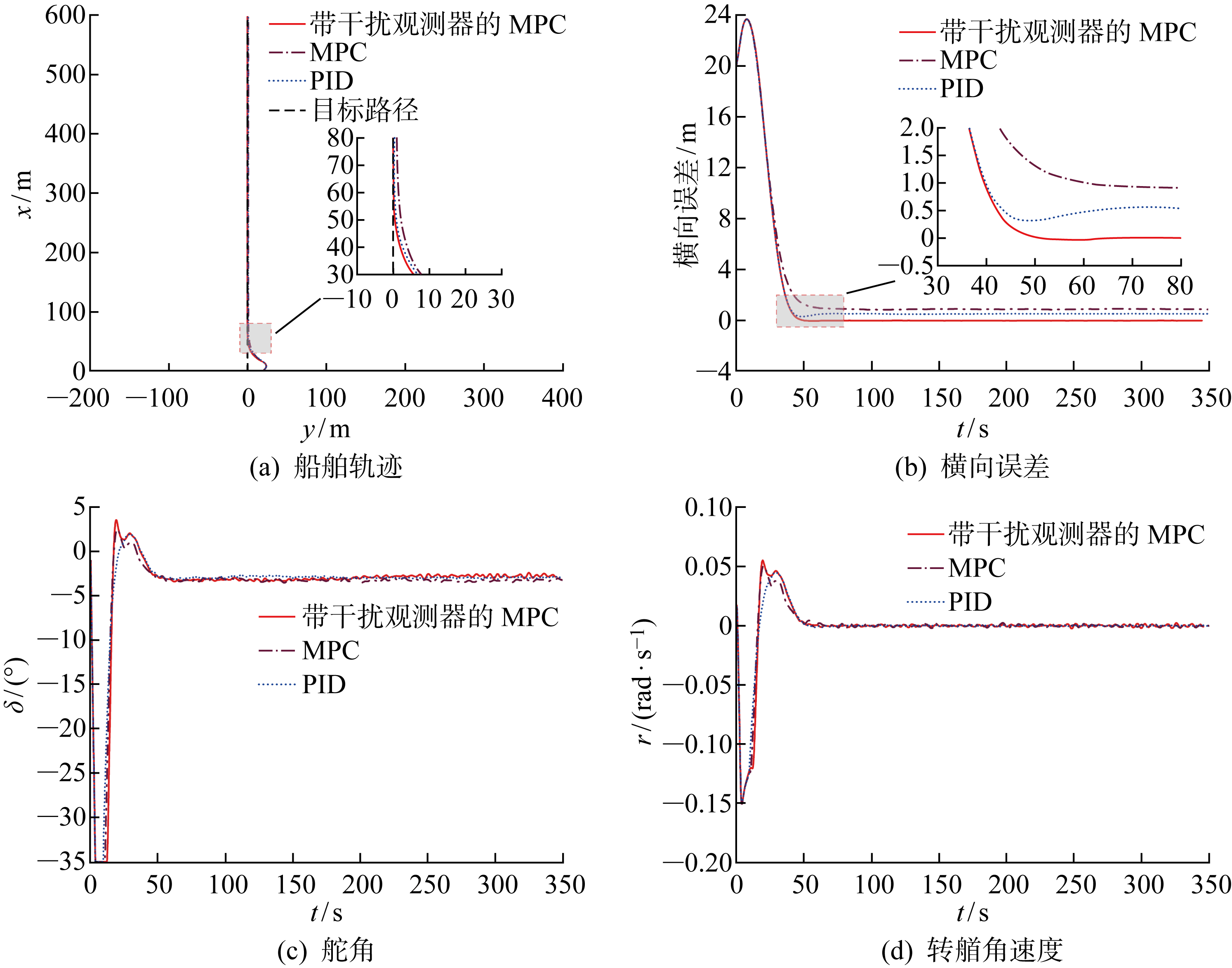
图8
船舶避碰仿真结果
| [1] | MOREIRA L, FOSSEN T I, GUEDES SOARES C. Path following control system for a tanker ship model[J]. Ocean Engineering, 2007, 34(14): 2074-2085. |
| [2] | BORHAUG E, PAVLOV A, PETTERSEN K Y. Integral LOS control for path following of underactuated marine surface vessels in the presence of constant ocean currents[C]//IEEE Conference on Decision and Control. Cancun, Mexico: IEEE, 2008: 4984-4991. |
| [3] | FOSSEN T I, PETTERSEN K Y, GALEAZZI R. Line-of-sight path following for Dubins paths with adaptive sideslip compensation of drift forces[J]. IEEE Transactions on Control Systems Technology, 2015, 23(2): 820-827. |
| [4] |
NIE J, LIN X. Improved adaptive integral line-of-sight guidance law and adaptive fuzzy path following control for underactuated MSV[J]. ISA Transactions, 2019, 94: 151-163.
doi: S0019-0578(19)30184-3 pmid: 31053360 |
| [5] | NELSON D R, BARBER D B, MCLAIN T W, et al. Vector field path following for small unmanned air vehicles[C] //2006 American Control Conference. Minneapolis, USA: IEEE, 2006: 7. |
| [6] | NELSON D R, BARBER D B, MCLAIN T W, et al. Vector field path following for miniature air vehicles[J]. IEEE Transactions on Robotics, 2017, 23(3): 519-529. |
| [7] | XU H T, FOSSEN T I, GUEDES SOARES C. Uniformly semiglobally exponential stability of vector field guidance law and autopilot for path-following[J]. European Journal of Control, 2020, 53: 88-97. |
| [8] | XU H T, HINOSTROZA M A, GUEDES SOARES C. Modified vector field path-following control system for an underactuated autonomous surface ship model in the presence of static obstacles[J]. Journal of Marine Science and Engineering, 2021, 9(6): 652. |
| [9] | SMIERZCHALSKI R. Evolutionary trajectory planning of ships in navigation traffic areas[J]. Journal Marine Science and Technology, 1999, 4(1): 1-6. |
| [10] | 周凤杰. 船舶避碰的粒子群-遗传(PSO-GA)的混合优化算法研究[J]. 船舶力学, 2021, 25(7): 909-916. |
| ZHOU Fengjie. Research on hybrid optimization algorithm of particle swarm-genetic (PSO-GA) for ship collision avoidance[J]. Journal of Ship Mechanics, 2021, 25(7): 909-916. | |
| [11] | ABDELAAL M, FRANZLR M, HAHN A. Nonlinear model predictive control for trajectory tracking and collision avoidance of underactuated vessels with disturbances[J]. Ocean Engineering, 2018, 160: 168-180. |
| [12] | LIU Z L, SONG S M, YUAN S Z, et al. ALOS-based USV path-following control with obstacle avoidance strategy[J]. Journal of Marine Science and Engineering, 2022, 10(9): 1203. |
| [13] | 陆潇杨, 刘志全, 高迪驹, 等. 带漂角和输入饱和的水面船舶航向控制[J]. 中国舰船研究, 2021, 16(2): 194-202. |
| LU Xiaoyang, LIU Zhiquan, GAO Diju, et al. Surface ship heading control with sideslip angle and input saturation[J]. Chinese Journal of Ship Research, 2021, 16(2): 194-202. | |
| [14] | QIU B, WANG G, FAN Y, et al. Adaptive sliding mode trajectory tracking control for unmanned surface vehicle with modeling uncertainties and input saturation[J]. Applied Sciences, 2019, 9(6): 1240. |
| [15] | 柳晨光, 初秀民, 王乐, 等. 欠驱动水面船舶的轨迹跟踪模型预测控制器[J]. 上海交通大学学报, 2015, 49(12): 1842-1854. |
| LIU Chenguang, CHU Xiumin, WANG Le, et al. Trajectory tracking controller for underactuated surface vessels based on model predictive control[J]. Journal of Shanghai Jiao Tong University, 2015, 49(12): 1842-1854. | |
| [16] | WANG L, LI S J, LIU J L, et al. Data-driven model identification and predictive control for path-following of underactuated ships with unknown dynamics[J]. International Journal of Naval Architecture and Ocean Engineering, 2022, 14: 100445. |
| [17] | ZHANG H G, ZHANG X K, BU R X. Active disturbance rejection control of ship course keeping based on nonlinear feedback and ZOH component[J]. Ocean Engineering, 2021, 233: 109136. |
| [18] | YANG H L, DENG F, HE Y, et al. Robust nonlinear model predictive control for reference tracking of dynamic positioning ships based on nonlinear disturbance observer[J]. Ocean Engineering, 2020, 215: 107885. |
| [19] |
贺宏伟, 邹早建, 曾智华. 欠驱动水面船舶的自适应神经网络-滑模路径跟随控制[J]. 上海交通大学学报, 2020, 54(9): 890-897.
doi: 10.16183/j.cnki.jsjtu.2019.122 |
| HE Hongwei, ZOU Zaojian, ZENG Zhihua. Adaptive NN-SM control for path following of underactuated surface vessel[J]. Journal of Shanghai Jiao Tong University, 2020, 54(9): 890-897. | |
| [20] | DU J, HU X, KRSTIĆ M, et al. Robust dynamic positioning of ships with disturbances under input saturation[J]. Automatica, 2016, 73: 207-214. |
| [21] | MAYNE D Q, RAWLINGS J B, RAO C V, et al. Constrained model predictive control: Stability and optimality[J]. Automatica, 2000, 36(6): 789-814. |
| [22] | ZENG Z H, ZOU Z J, WANG Z H, et al. Path following of underactuated marine vehicles based on model predictive control[J]. International Journal of Offshore and Polar Engineering, 2020, 30(4): 463-470. |
| [23] | LI Z X, LI R H, BU R X. Path following of under-actuated ships based on model predictive control with state observer[J]. Journal of Marine Science and Technology, 2021, 26(2): 408-418. |
| [24] | FOSSEN T I. Handbook of marine craft hydrodynamics and motion control[M]. New York, USA: John Wiley & Sons, 2011. |
| [25] | NMRI. Tokyo 2015: A workshop on CFD in ship hydrodynamics[DB/OL]. (2015-12-02)[2023-04-02]. https://t2015.nmri.go.jp/onrt_gc.html. |
| [26] | GUO H P, ZOU Z J. System-based investigation on 4-DOF ship maneuvering with hydrodynamic derivatives determined by RANS simulation of captive model tests[J]. Applied Ocean Research, 2017, 68: 11-25. |
| [1] | 贺益雄, 代永刚, 赵兴亚, 于德清, 黄立文. 河口深槽可航宽度变化水域航行决策方法[J]. 上海交通大学学报, 2025, 59(4): 489-502. |
| [2] | 曹永吉, 张江丰, 王天宇, 郑可轲, 吴秋伟. 基于分布式模型预测控制的自适应二次调频策略[J]. 上海交通大学学报, 2025, 59(3): 333-341. |
| [3] | . 基于数据驱动的永磁同步电机控制系统模型预测控制方法[J]. J Shanghai Jiaotong Univ Sci, 2025, 30(2): 270-279. |
| [4] | 刘月笙, 贺宁, 贺利乐, 张译文, 习坤, 张梦芮. 基于机器学习的移动机器人路径跟踪MPC控制器参数自整定[J]. J Shanghai Jiaotong Univ Sci, 2024, 29(6): 1028-1036. |
| [5] | 邱革非, 冯泽华, 沈赋, 何超, 何虹辉, 刘铠铭. 考虑车网互动的园区电网动态双层能量管理策略[J]. 上海交通大学学报, 2024, 58(6): 916-925. |
| [6] | 张啸天1,何德峰1,廖飞2. 复杂环境及约束下舰载机自动着舰迭代模型预测控制[J]. J Shanghai Jiaotong Univ Sci, 2024, 29(4): 712-724. |
| [7] | 穆建彬,杨海丽,何德峰. 基于控制屏障函数的自主移动机器人安全编队分布式模型预测控制[J]. J Shanghai Jiaotong Univ Sci, 2024, 29(4): 678-688. |
| [8] | 金飞宇,陈龙胜,李统帅,石童昕. 高阶MIMO非线性多智能体系统分布式协同抗干扰控制[J]. J Shanghai Jiaotong Univ Sci, 2024, 29(4): 656-666. |
| [9] | 蔡振华, 黎灿兵, 阳同光, 魏娟, 葛睿, 李立雄. 考虑动态频率惯量特性的储能电池参与电网一次调频控制[J]. 上海交通大学学报, 2024, 58(12): 1946-1956. |
| [10] | 刘传斌, 矫文书, 吴秋伟, 陈健, 周前. 基于模型预测控制的风储联合电场参与电网二次调频策略[J]. 上海交通大学学报, 2024, 58(1): 91-101. |
| [11] | 于特, 刘佳鹏, 吴超, 周畅, 周胜增, 王磊. 基于非线性干扰观测器的无人船与自主水下航行器协同运动控制策略[J]. 上海交通大学学报, 2023, 57(S1): 114-123. |
| [12] | 姜恩宇, 陈宇, 施峥靖, 吴哲城, 林顺富, 李东东. 考虑碳配额引导需求响应的微电网能量管理策略[J]. 上海交通大学学报, 2023, 57(9): 1126-1136. |
| [13] | 奚鑫泽, 邢超, 覃日升, 何廷一, 和鹏, 孟贤, 程春辉. 含双馈风力发电系统的配电网短路电流特性[J]. 上海交通大学学报, 2023, 57(7): 921-927. |
| [14] | 张晨宇, 孟帅. 基于模型预测控制的深海钻井立管再入井仿真分析[J]. 上海交通大学学报, 2023, 57(11): 1389-1399. |
| [15] | 姜俊豪, 陈刚. 驾驶机器人转向操纵的动态模型预测控制方法[J]. 上海交通大学学报, 2022, 56(5): 594-603. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||