

当传统的刚体机器人与自然环境互动时,存在一些安全隐患. 同时,刚体机器人的环境适应性差,在运动灵活性上有所欠缺. 由柔性材料制成的软体机器人可以弥补刚体机器人的不足,具有安全性好、操作方便、运动灵活、适应性强的特点[1⇓-3].文献[4]研究了一种能够爬过障碍物的4条腿软体机器人.受螃蟹爬行行为及其结构特征的启发,他们开发了一种能够运送物品的软体机器人,该机器人可跨越低矮障碍物.文献[5]基于改进的介电弹性体(DE)最小能量结构致动器开发了一种类似环节动物的软体机器人.文献[6]提出了一种水凝胶机器人,其可以在水中平坦或倾斜的表面上快速行走.如今关于软体机器人的研究日益增多,但对具有多地形运动能力的软体机器人的研究还鲜有耳闻.
目前,现有的多地形机器人,如足式或轮式机器人,不具备攀爬能力,无法实现立体机动,限制了其在极端环境中的应用.现有爬管机器人应用范围非常有限,仅能在管内或管外进行移动,并且部署流程繁复.文献[7]提出了一种由3个可伸缩的气动软体驱动器和两个柔性足组成的并联软体爬管机器人,但其体型较大、质量较重,只能在大型管道内部爬行,无法在外部爬行.文献[8]开发了具有跳跃和爬行功能的软体爬管机器人,但其无法在其他复杂地形中运动.文献[9]设计的一种轻型软体机器人,能够实现在地面上爬行和越障,但由于体型过小而无法搭载传感器.文献[10]提出了一款执行灾害响应任务的两栖全地形移动机器人,其能够爬上0.3 m的台阶、楼梯和雪坡,但受限于轮式而无法实现攀爬运动.文献[11]提出了一种3D打印机器人和一种波纹柔性腿,其能够绕两个轴旋转,该机器人能够将腿抬离地面5.3 cm,并且能够以20 mm/s的速度行走,但该波纹软腿无法完成攀爬运动.文献[12]设计了一种用于核电站管道和石油化工综合管道检测的远程控制刚体爬管机器人,但其体型大、质量重,只能在大型管道外部爬行.
针对现有爬管机器人应用范围有限、运动场景单一、多地形运动机器人无法攀爬、空间运动受限等问题,本文提出一种新型的双模块软体机器人设计,该机器人由两个软体模块组成,质量轻、体积小,采用旋转运动模式可实现机器人在管道外侧、斜坡、草地、崎岖路面等多种复杂地面环境中的运动.
1 双模块软体机器人的设计
为了实现全向弯曲功能,软驱动器气室需要沿周向分布.理论上,3个沿圆周分布的气室可实现全向弯曲功能,但是随着气室数量的增加,弯曲角度的变化将更为平滑.若气室数量太多会导致结构复杂,不利于生产加工,因而本模块化软体机器人采用4个气室设计.气室截面设计为圆形,圆形气室膨胀时应力、应变分布更加平衡,具有更强的耐用性.
图1
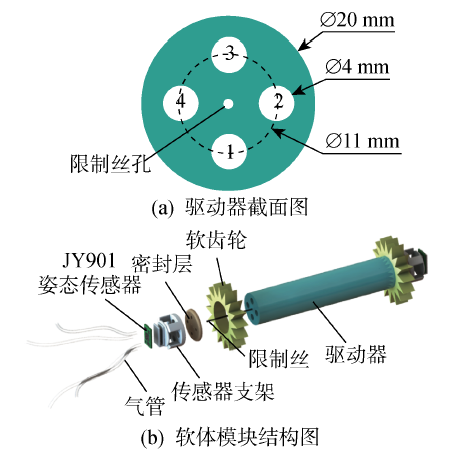
双模块软体机器人由两个全向弯曲软体模块组成,每个全向弯曲软体模块由一个驱动器、两个由低硬度硅胶制成的软体齿轮、两个JY901S姿态传感器、一根中心限制线、两个传感器支架、两个密封层以及4根气管组成(见图1(b)).其中,软体齿轮的作用是增大双模块软体机器人的运动速度.当软体齿轮受到压力时,齿轮外侧产生接触变形,增大了接触面面积,提高了摩擦系数,同时软体齿轮增大了双模块软体机器人的外径,能够提升双模块软体机器人运动速度.
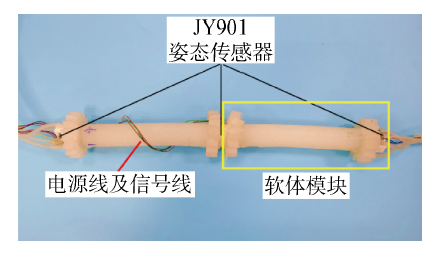
双模块软体机器人由底部传感器支架连接的两个全向弯曲软体模块组成,在头部、中部、尾部安装了3个姿态传感器.传感器的电源线和信号线为螺旋形,能够适应不同方向的弯曲.双模块软体机器人的总有效弯曲长度为180 mm,不包括密封层的厚度,如图2所示.
图2
2 单模块软体驱动器运动分析
式中:
图3
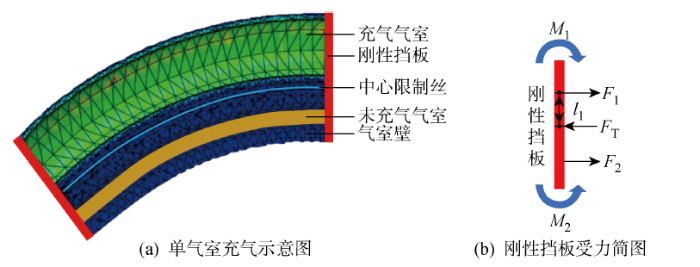
图4
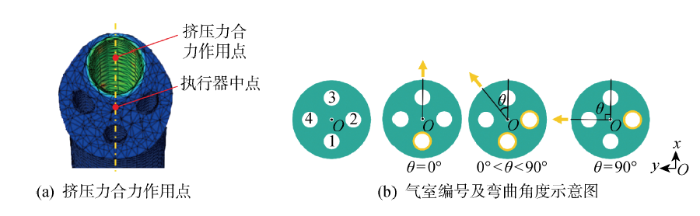
由单气室弯曲变形机理可知,驱动器的弯曲力矩主要由气室对挡板的挤压力产生.由驱动器结构的对称性可知,挤压力合力的作用点位于通过气室圆心和驱动器中心的对称轴上,如图4(a)所示.弯曲力矩的方向由充气气室圆心指向驱动器中心,双气室同时充气时驱动器的弯曲力矩为两个气室的合弯曲力矩.合力矩方向与两个气室产生的弯曲力矩的相对大小有关,而合力矩大小由两个气室气压的大小决定.易知合力矩方向为驱动器的弯曲角度,通过控制不同气室间气压的大小,可以使驱动器朝任意方向进行弯曲,实现全向弯曲运动.气室编号及弯曲角度示意图如图4(b)所示.当1号气室进行充气时,驱动器将向x正方向弯曲,定义此时的弯曲角度为θ=0°;当2号气室充气时,驱动器将向y正方向进行弯曲,定义此时的弯曲角度为θ=90°.若1号气室和2号气室同时充气,则弯曲角度将在 0°~90° 范围内,具体的弯曲角度由两个气室的气压决定.
图5
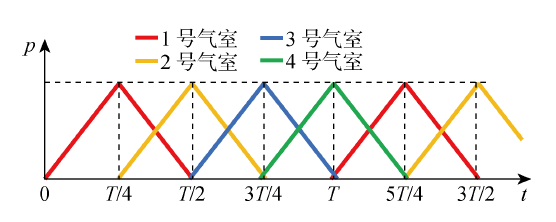
图5
驱动器4个气室的气压变化规律
Fig.5
Pressure change pattern of four air chambers of actuator
图6
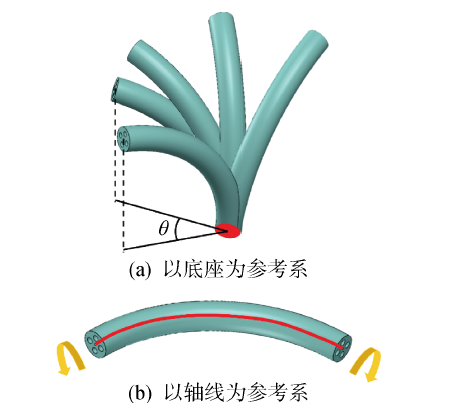
图6
直通式驱动器的旋转运动示意图
Fig.6
Schematic diagram of rotary movement of straight-through actuator
基于上述旋转运动和弯曲运动,单个驱动器具备多地形运动能力.在平地、沙地、草坪、斜坡等地形进行移动时,驱动器与环境之间的接触压力由重力提供.在爬管运动时需要通过直通式驱动器的弯曲产生接触压力.驱动器各部分的旋转方向不同,产生的摩擦力方向也不同.
单个直通式驱动器竖直爬管运动过程的受力情况如图7所示.其中:Mr为直通式驱动器进行旋转运动时的旋转力矩;G为直通式驱动器受到的重力;Fc为直通式驱动器缠绕管道外壁产生的抱紧力,抱紧力的方向是由驱动器截面圆心指向管壁的法向方向;Fn为管道对直通式驱动器的反作用力;Ff为直通式驱动器与管道外壁之间的静摩擦力;r0为直通式驱动器的外径.
图7
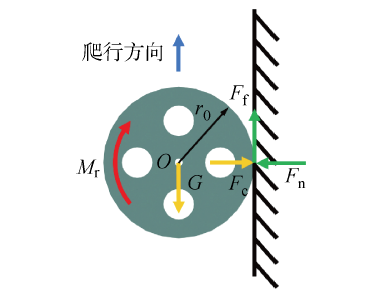
图7
直通式驱动器竖直爬管运动过程的受力情况示意图
Fig.7
Schematic diagram of forces of straight through actuator during vertical pipe climbing movement
爬管机器人克服重力沿竖直管道攀爬需要满足下列条件:
式中:ma为直通式驱动器质量;g为重力加速度;μ为直通式驱动器与管道外壁之间的摩擦因数.从上述不等式可知,为了实现爬管运动有3个要点:① 增大直通式驱动器和管道壁之间的摩擦因数;② 增大直通式驱动器在爬管过程中的抱紧力,使其尽可能紧地缠绕在管道外壁上;③ 直通式驱动器要能够输出足够的旋转力矩.其中,直通式驱动器的抱紧力和旋转力矩间存在耦合性,通过实验发现,爬管运动主要受抱紧力影响,当抱紧力满足爬管条件时,旋转力矩也自动满足爬管条件.
双模块软体机器人的管外爬行运动如图8所示.在实际管外爬管运动时,双模块软体机器人依赖于软体齿轮上的A、B、C这3点形成与管道的三点式接触,其中C点在视线中被遮挡.进行管外爬行时,双模块软体机器人的两个软体模块同步进行旋转,在A、B、C这3点处产生竖直向上的摩擦力驱动双模块软体机器人向上攀爬.双模块软体机器人的管内爬行运动如图8(b)所示,双模块软体机器人与管道壁之间的接触点由内侧的
图8

图8
双模块软体机器人爬行运动示意图
Fig.8
Schematic diagram of dual modular soft robot climbing
3 双模块软体机器人步态控制方法
双模块软体机器人具有柔顺性好、适应能力强的特点,通过对运动步态进行设计,双模块软体机器人在开环控制下可简单快速地实现良好的运动效果.
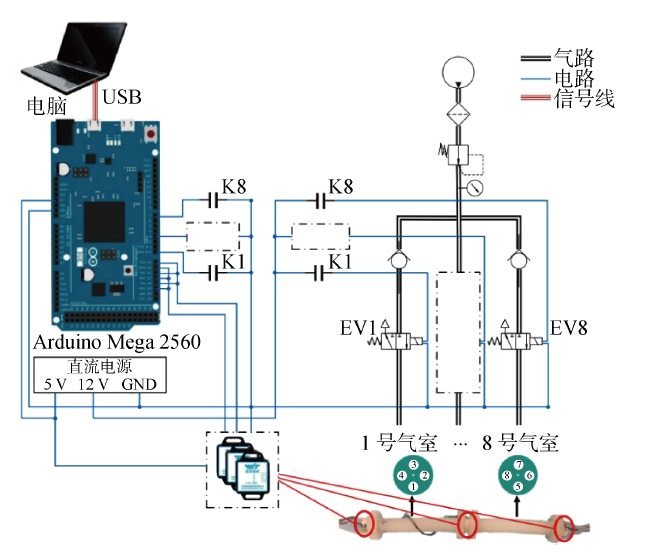
双模块软体机器人的控制系统如图9所示,其由气路系统和电路系统组成,其中:USB为通用串行总线,用于电脑与微控制器的连接和通信;GND为电路接地端;K1,K2,…,K8为8个继电器,每个继电器控制一个微型电磁阀的开关;EV1,EV2,…,EV8为8个微型电磁阀,每个微型电磁阀控制一个气室的充放气.控制系统主要包含电源、气泵、减压阀、微型电磁阀、姿态传感器和微控制器.
图9
双模块软体机器人采用通过调节充放气过程的气体流量来实现对气室气压的间接控制,通过脉冲宽度调制(PWM)波对二位三通电磁阀的通断进行控制,从而实现不同步态.通过调节PWM波的占空比,可以调节充电时间和放电时间的比率,调节气室中的气压.其中,二位三通电磁阀使用的是SMC S070C-5DC-32微型电磁阀,其主要参数如表1所示.其中:Ue为电子阀额定电压;pmax为电子阀最高使用压力;mSMC为电磁阀质量;PSMC为电磁阀功耗;t1为通电响应时间,t2为断电响应时间, 响应时间是最高工作压力和额定电压下的值.
表1 SMC S070C-5DC-32 性能参数
Tab.1
| 参数 | 取值 |
|---|---|
| Ue/V | DC 24 |
| pmax/kPa | 500 |
| mSMC/g | 5 |
| PSMC/ W | 0.5 |
| t1/ms | <3 |
| t2/ms | <3 |
根据响应时间,电磁阀的最大工作频率约为160 Hz.当使用PWM波控制电磁阀时,由于占空比的影响,电磁阀的工作频率应远低于160 Hz.假设PWM波的频率为f1,则单个周期的长度为1/f1.如果占空比为d1,则PWM波的占空比和频率应满足以下不等式:
给定频率下占空比需满足:
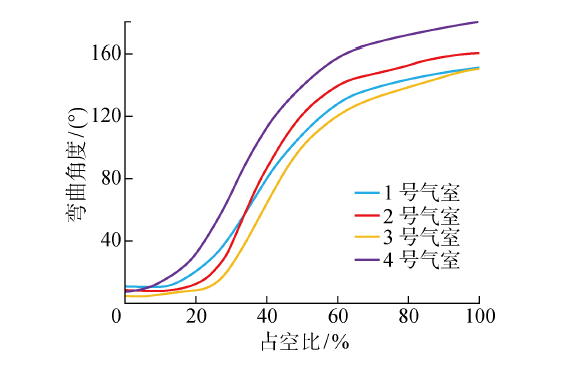
腔室压力由PWM波的占空比决定,因此占空比的范围决定了腔室压力的调节范围.根据式(6),为了获得更大的气压调节范围,PWM波的频率不宜过高.经测试,当PWM波的频率低于30 Hz时,气室内气压的抖动明显,调节效果差.当占空比为15%~90%时,8个电磁阀可以正常工作.实验所用 PWM 波频率为 30 Hz, 有效占空比范围为15%~90%.对于超出有效范围的占空比做饱和处理,当占空比大于90%时设定占空比为90%,当占空比小于15%时设定占空比为15%.腔室压力决定了驱动器的弯曲角度,而腔室压力又由PWM波的占空比决定.于是,在200 kPa的供气气压下,依次对各气室进行充气测试,得到了驱动器弯曲角度与PWM波占空比之间的关系,通过线性处理后,得到如图10所示的关系曲线.
图10
在步态控制方法中,两个软体模块采用的控制信号完全相同,因此运动规律也完全相同.以爬管步态为例,基于以上思想,设计了如图11所示的爬管步态.其中一个软体模块的1~4 号气室的分布与另一软体模块的 5~8 号气室相对应.
图11
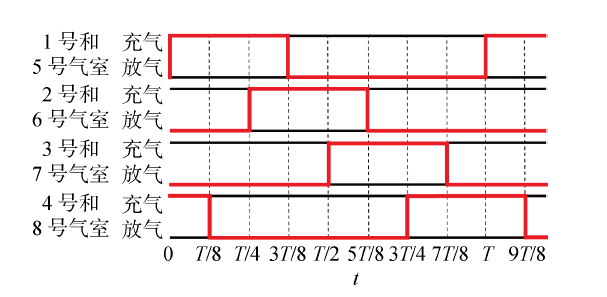
图11
爬管步态下的气室充放气模式
Fig.11
Air chamber inflation and deflation pattern of pipe-climbing gait
图12
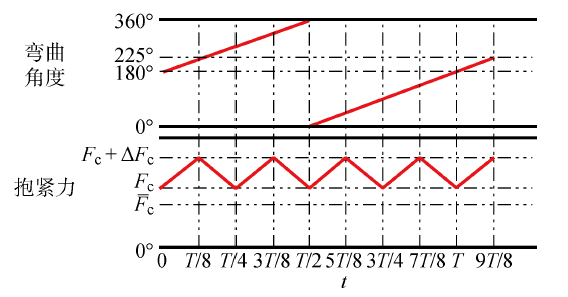
图12
步态控制方法下双模块软体机器人抱紧力及弯曲角度示意图
Fig.12
Schematic diagram of bending angle and direction of dual modular soft robot under gait control strategy
假设气室的单次充气和单次放气过程都能在 1/8 个周期内完成.给定目标管道后,手动调整气压源气压,使得仅 1 号气室和 5 号气室充气时,双模块软体机器人能紧密缠绕在管道外侧不发生掉落,此时有Fc>
假设双模块软体机器人与管道外壁之间无打滑现象,则双模块软体机器人的爬管速度可以由下式求出:
式中: r1=25 mm,为软齿轮半径.增加软体齿轮外径和减小周期长度都能提高双模块软体机器人的爬管速度,但当周期长度低于一定范围后,单次充放气过程无法在 1/8 个周期内达到稳态,将对爬管运动的稳定性产生负面影响.
多地形运动都可采用如图11所示的运动步态,只需在步态周期开始前对输入气压进行调整即可.
4 软体机器人多地形运动实验
4.1 转向实验
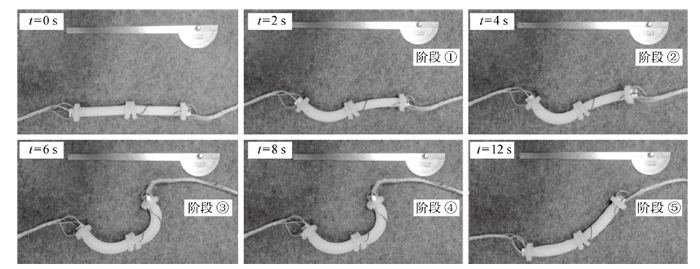
双模块软体机器人能实现单模块驱动器无法完成的转向功能.双模块软体机器人转弯运动过程如图13所示.转弯运动步态的分为5个阶段:① 左侧模块充气弯曲使双模块软体机器人不易翻倒;② 右侧模块向上弯曲离开地面;③ 右侧模块朝斜上方弯曲;④ 右侧模块回到地面;⑤ 同时减小两个模块的弯曲角度.至此,模块完成了向左转弯.双模块软体机器人转向运动的原理为:右侧模块在阶段③不与地面接触不受摩擦力影响,但是在阶段⑤会受到地面的摩擦力,两个阶段受到的外力无法抵消,导致双模块软体机器人发生偏转.双模块软体机器人一个周期转过的角度由阶段③右侧模块转过的角度决定.
图13
4.2 爬管实验
图14
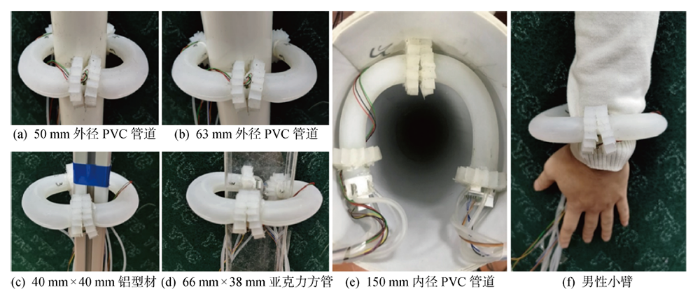
表2 不同攀爬环境下的垂直移动速度
Tab.2
| 不同攀爬环境 | 移动速度/(mm·s-1) | 不同攀爬环境 | 移动速度/(mm·s-1) |
|---|---|---|---|
| 50 mm外径PVC管道 | 6.5 | 66 mm×38 mm亚克力方管 | 8.6 |
| 63 mm外径PVC管道 | 8.1 | 150 mm内径PVC管道 | 6.8 |
| 40 mm×40 mm铝型材 | 5.4 | 男性小臂 | 11.7 |
4.3 爬坡试验
爬坡实验的主要实验装置为一个角度可调的斜坡,斜坡表面为聚氨酯(PU)材质.在不同斜度下,使用周期为 12 s的步态控制方法驱动双模块软体机器人完成爬坡运动,在实验中选取的斜坡最大角度为28°.实验表明,双模块软体机器人在28° 斜坡上的平均速度约为 7.1 mm/s.具体的爬坡过程如图15所示.
图15
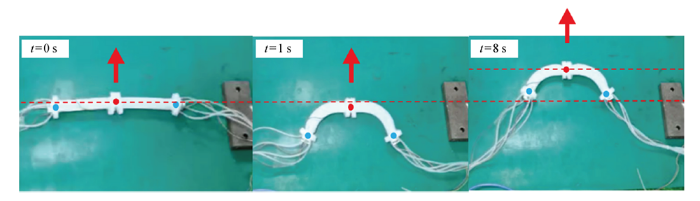
4.4 越障实验
图16
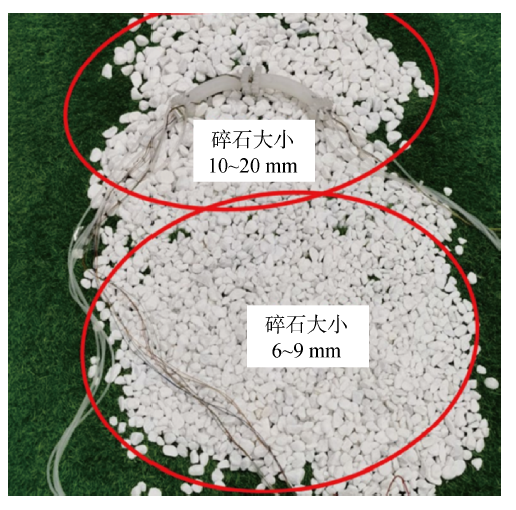
图17
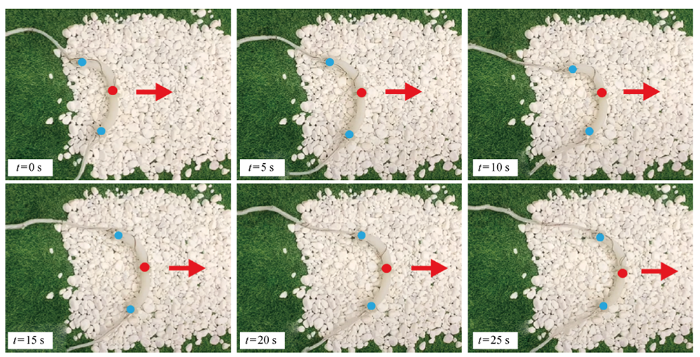
表3 不同地形下的运动速度
Tab.3
| 不同地形 | 移动速度/(mm·s-1) |
|---|---|
| 人造草皮 | 6.5 |
| 木地板 | 8.1 |
| 6~9 mm碎石路面 | 8.6 |
| 10~20 mm碎石路面 | 5.4 |
5 结语
本文提出了一种新颖的具备多地形运动能力的双模块软体机器人,每个软体模块由四气室全向弯曲软体气动驱动器组成;建立全向弯曲软体驱动器的弯曲模型,分析了全向弯曲软体驱动器弯曲角度的变化规律;提出了一种新型的旋转运动模式,该机器人能通过旋转运动模式在多种复杂环境中运动;针对模块化软体机器人柔顺性好的特点,提出了一种不依赖传感器的模块化软体机器人步态控制方法,能够更加简单快速地实现多地形运动功能,并通过实验验证了其可行性.该双模块软体机器人能在多种地形下进行稳定快速的运动,具有极强的适应性,在管道检测和复杂地形探测等方面具有潜在的应用价值.
参考文献
Soft actuator model for a soft robot with variable stiffness by coupling pneumatic structure and jamming mechanism
[J].DOI:10.1109/ACCESS.2020.2968928 URL [本文引用: 1]
Design, fabrication, and locomotion analysis of an untethered miniature soft quadruped, squad
[J].
Kinematics modeling of a twisted and coiled polymer-based elastomer soft robot
[J].DOI:10.1109/ACCESS.2019.2942486 URL [本文引用: 1]
Design and structure analysis of multi-legged bionic soft robot
[C]
Development of an annelid-like peristaltic crawling soft robot using dielectric elastomer actuators
[J].
Fast and programmable locomotion of hydrogel-metal hybrids under light and magnetic fields
[J].DOI:10.1126/scirobotics.abb9822 URL [本文引用: 1]
Design and modeling of a parallel-pipe-crawling pneumatic soft robot
[J].
DOI:10.1109/ACCESS.2019.2941502
[本文引用: 1]

Soft robots have unique advantages over traditional rigid robots and have broad application prospects in many fields, such as pipe inspections. Several of the reported pipe-crawling soft robots have long actuation periods and small locomotion speeds. Moreover, they lack active steering property to adapt to complex piping systems, such as T-shaped pipes. To solve the above problems, this paper proposes a novel parallel-pipe-crawling pneumatic soft robot consisting of three extensible pneumatic soft actuators and two flexible feet. The parallel structure and flexible feet allow the robot to reduce the number of steps in a crawling cycle. The extensible actuator allows the robot to change its body shape for active steering property. However, a complete mathematical model for soft robots with parallel structure is hard to establish. In this paper, the phenomenological modeling method is used to realize a mathematical model with high precision, limited calculation, and easy engineering applicability of the pipe-crawling soft robot. Then, the prototype of the robot is fabricated with the optimal structural parameters selected by finite element simulations. The static identification experiment shows that the average errors of the extended length and output force are 0.51 mm and 0.28 N, respectively. The crawling experiments in various scenarios show that the horizontal crawling speed is higher than 15 mm/s, the maximum load is 2.456 kg, and the minimum turning radius is 38.2 mm. The robot shows great potential for inspecting in complex pipes with high crawling efficiency, excellent flexibility, and strong adaptability by switching its crawling gaits.
Soft hopping and crawling robot for in-pipe traveling
[J].DOI:10.1016/j.eml.2020.100854 URL [本文引用: 1]
R-Crank: Amphibious all terrain mobile robot
[C]
3D printed soft actuators for a legged robot capable of navigating unstructured terrain
[C]
A remotely controlled out-pipe climbing robot
[C]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}