Journal of Shanghai Jiao Tong University ›› 2025, Vol. 59 ›› Issue (8): 1169-1180.doi: 10.16183/j.cnki.jsjtu.2023.646
• Mechanical Engineering • Previous Articles Next Articles
YAN He1, ZHU Xingyue1, HOU Zhangli1, WANG Weijun2, ZHANG Zhinan1( )
)
Received:2023-12-26
Revised:2024-02-17
Accepted:2024-03-07
Online:2025-08-28
Published:2025-08-26
Contact:
ZHANG Zhinan
E-mail:zhinanz@sjtu.edu.cn
CLC Number:
YAN He, ZHU Xingyue, HOU Zhangli, WANG Weijun, ZHANG Zhinan. Design and Motion Modeling of a Small-Scale Lunar Jumping Robot[J]. Journal of Shanghai Jiao Tong University, 2025, 59(8): 1169-1180.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2023.646
Fig.1
Schematic diagram of robot configuration
Fig.2
Schematic diagram of jumping leg structure
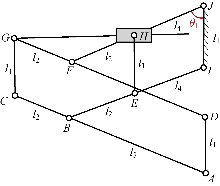
Fig.3
Schematic diagram of straightline jumping leg mechanism
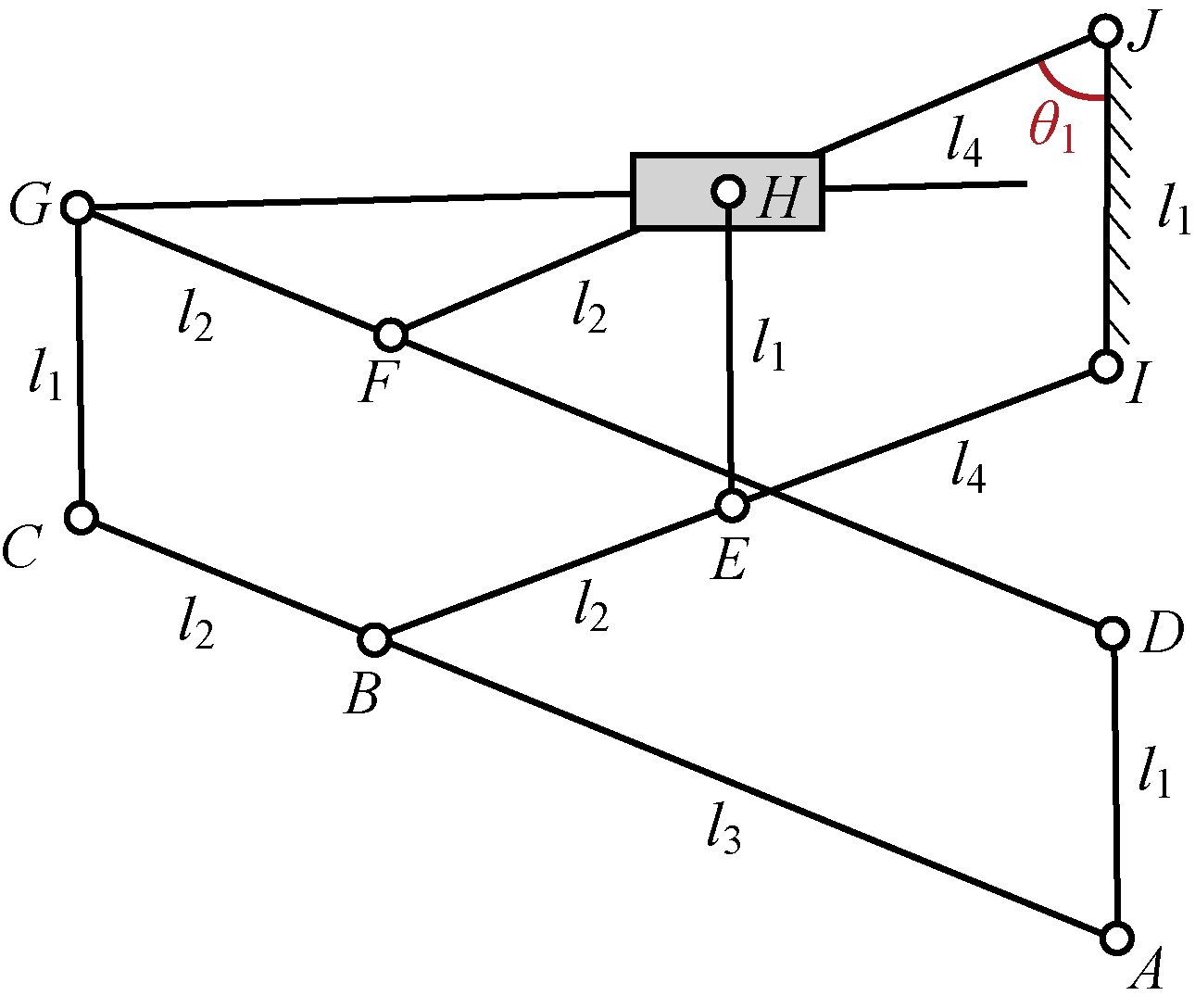
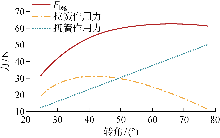
Fig.4
Relationship between Fleg and the force of the torsion springs and tension springs
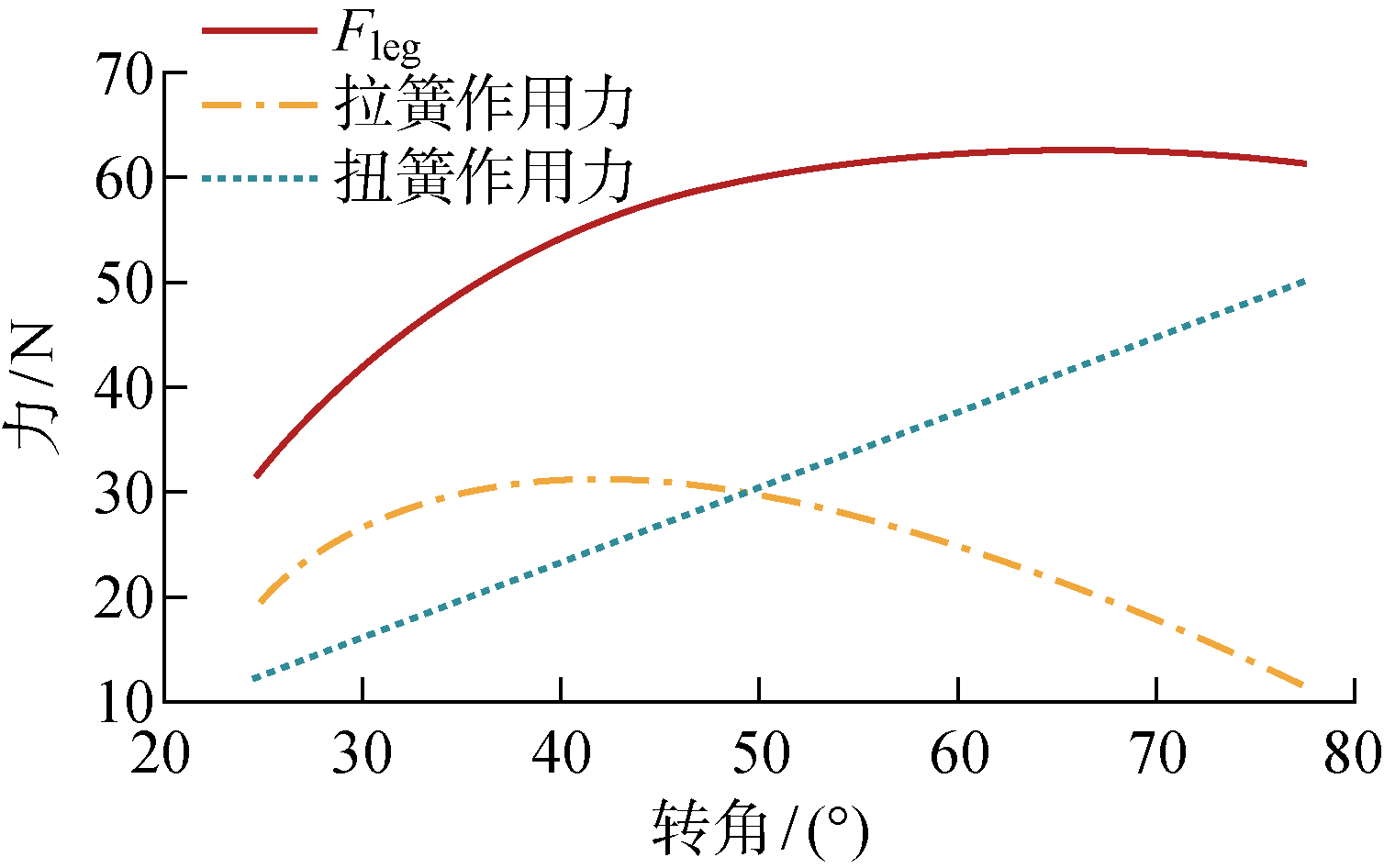
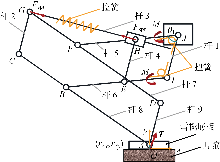
Fig.5
Schematic diagram of the lunar take-off dynamic model
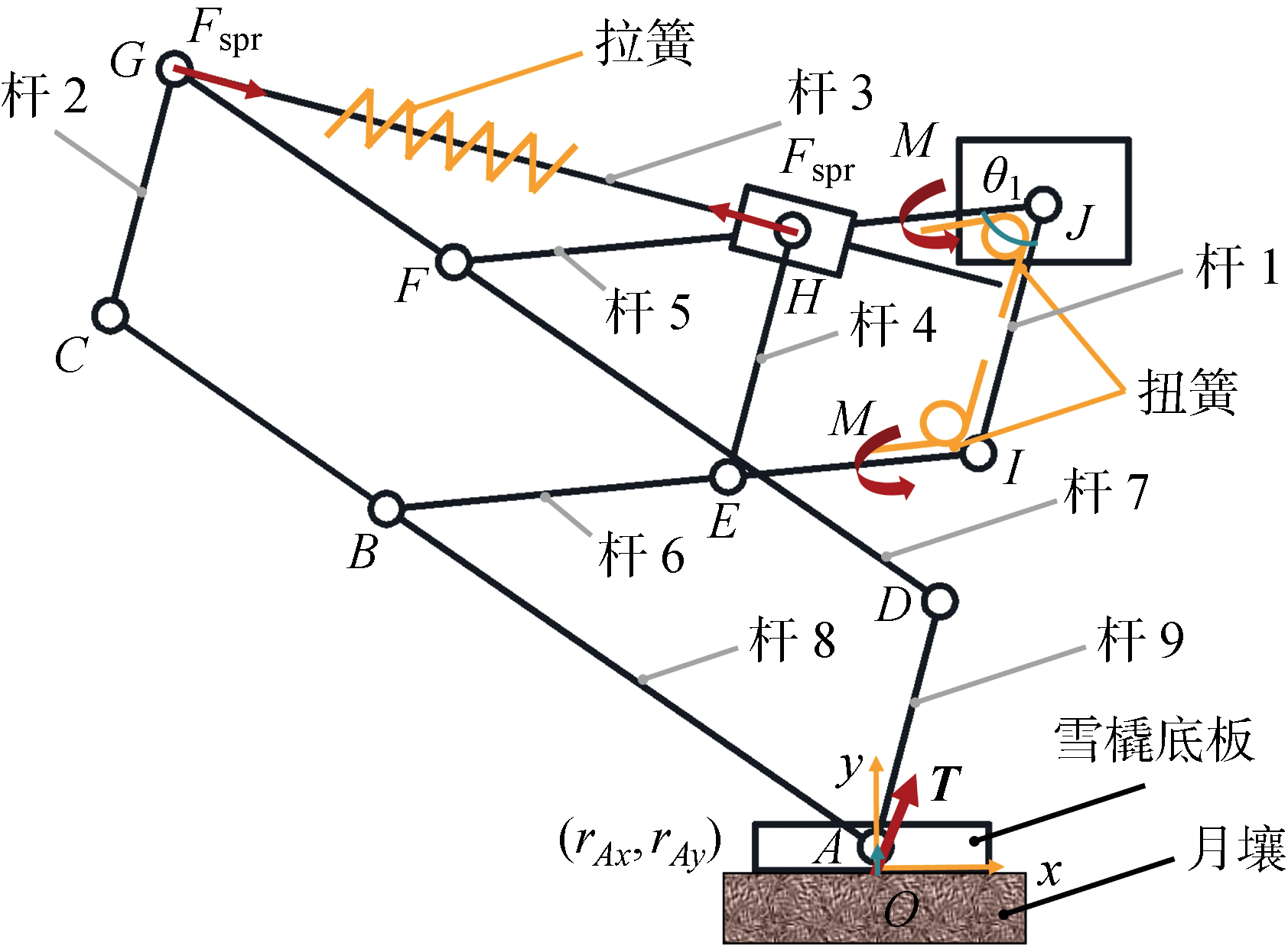
Fig.6
Discrete element model
Tab.1
Comparison of shear parameters of granular bed and real lunar soil
| 材质 | k/mm | c/Pa | θ/(°) |
|---|---|---|---|
| 离散元颗粒床 | 2.912 | 189.4 | 26.89 |
| 真实月壤 | 无 | 260~1 800 | 25~40 |
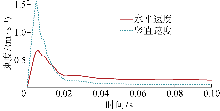
Fig.7
Speed curves of the bottom plate in the take-off process
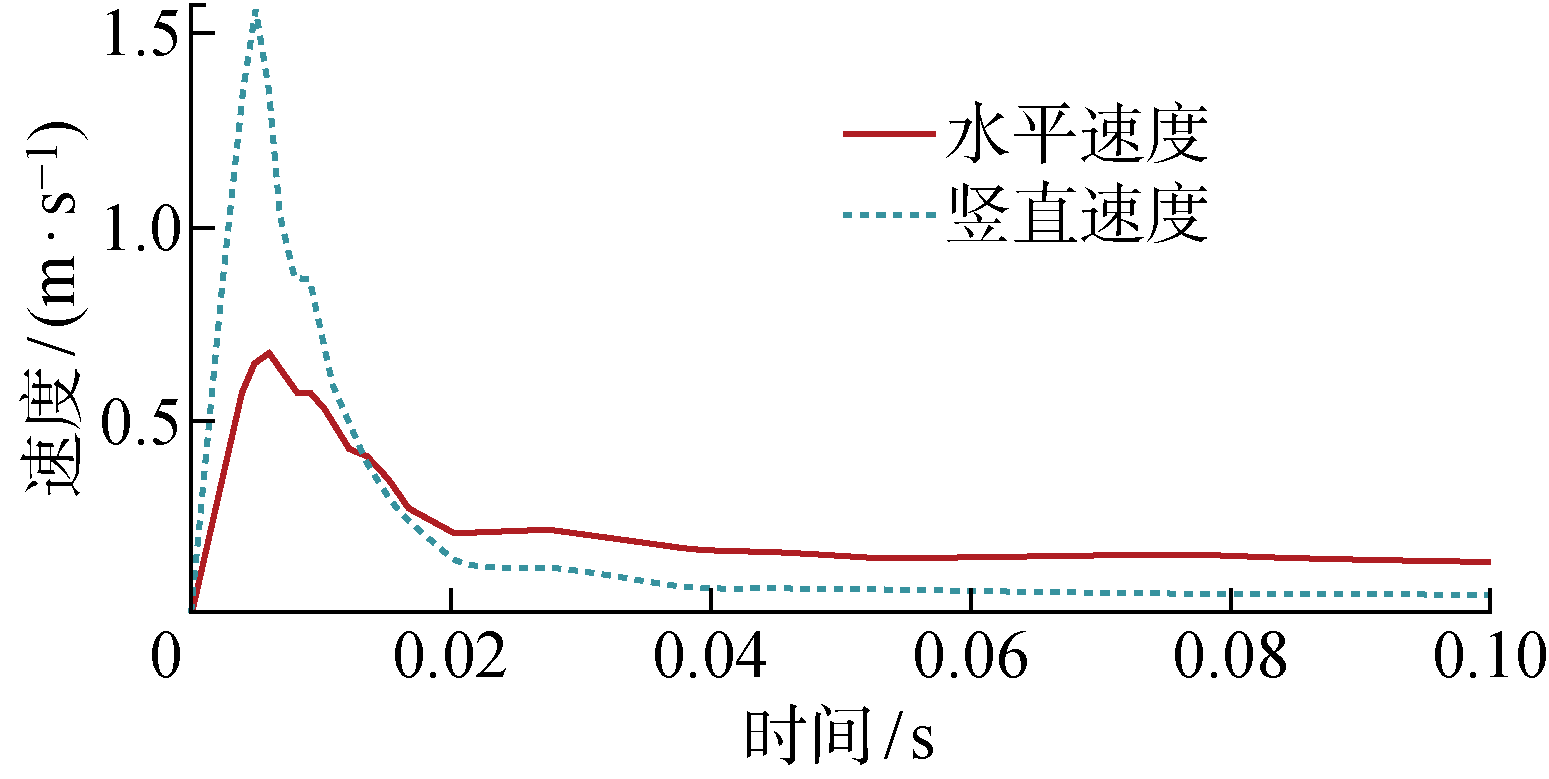
Fig.8
Schematic diagram of discrete element simulation experiment
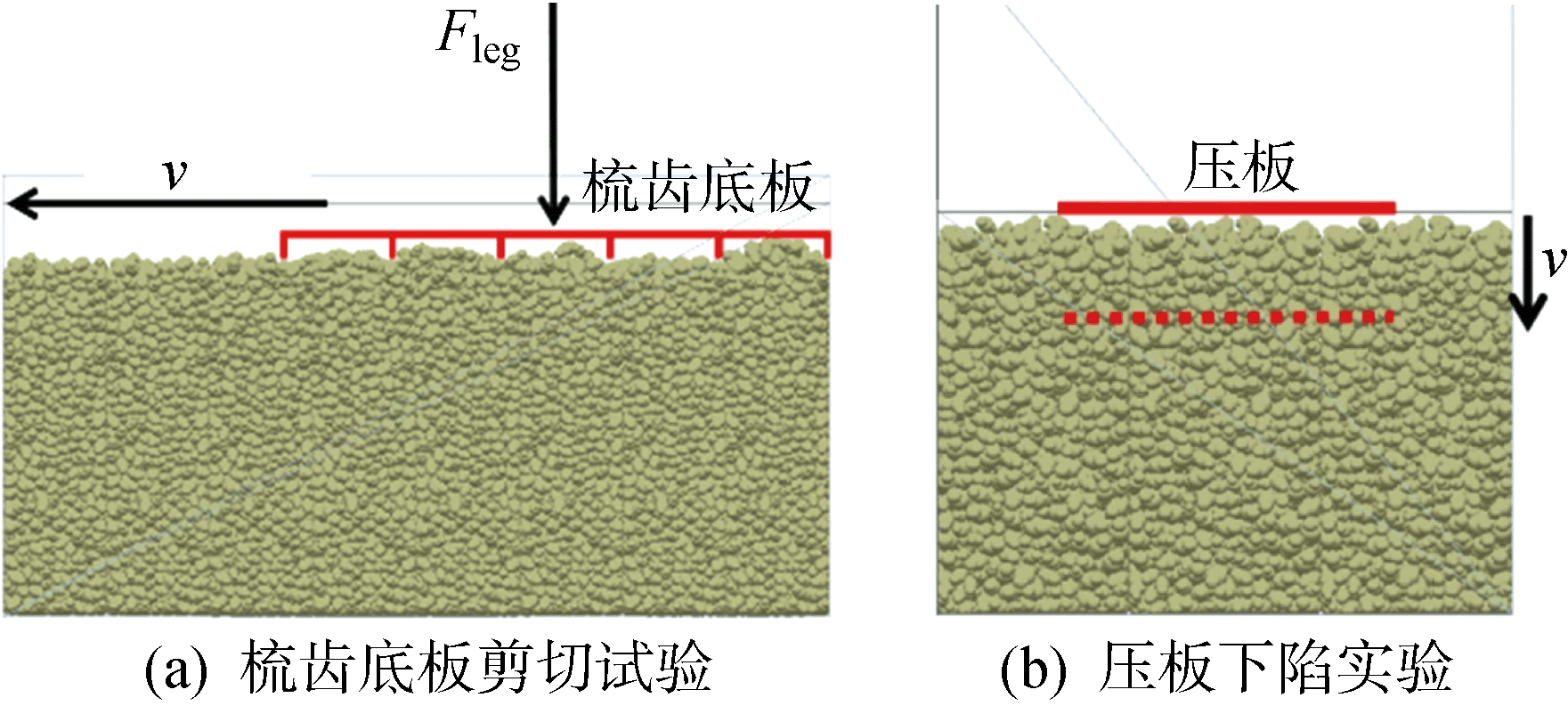
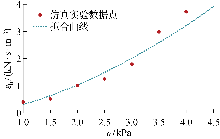
Fig.9
Fitting results of shear simulation experiments
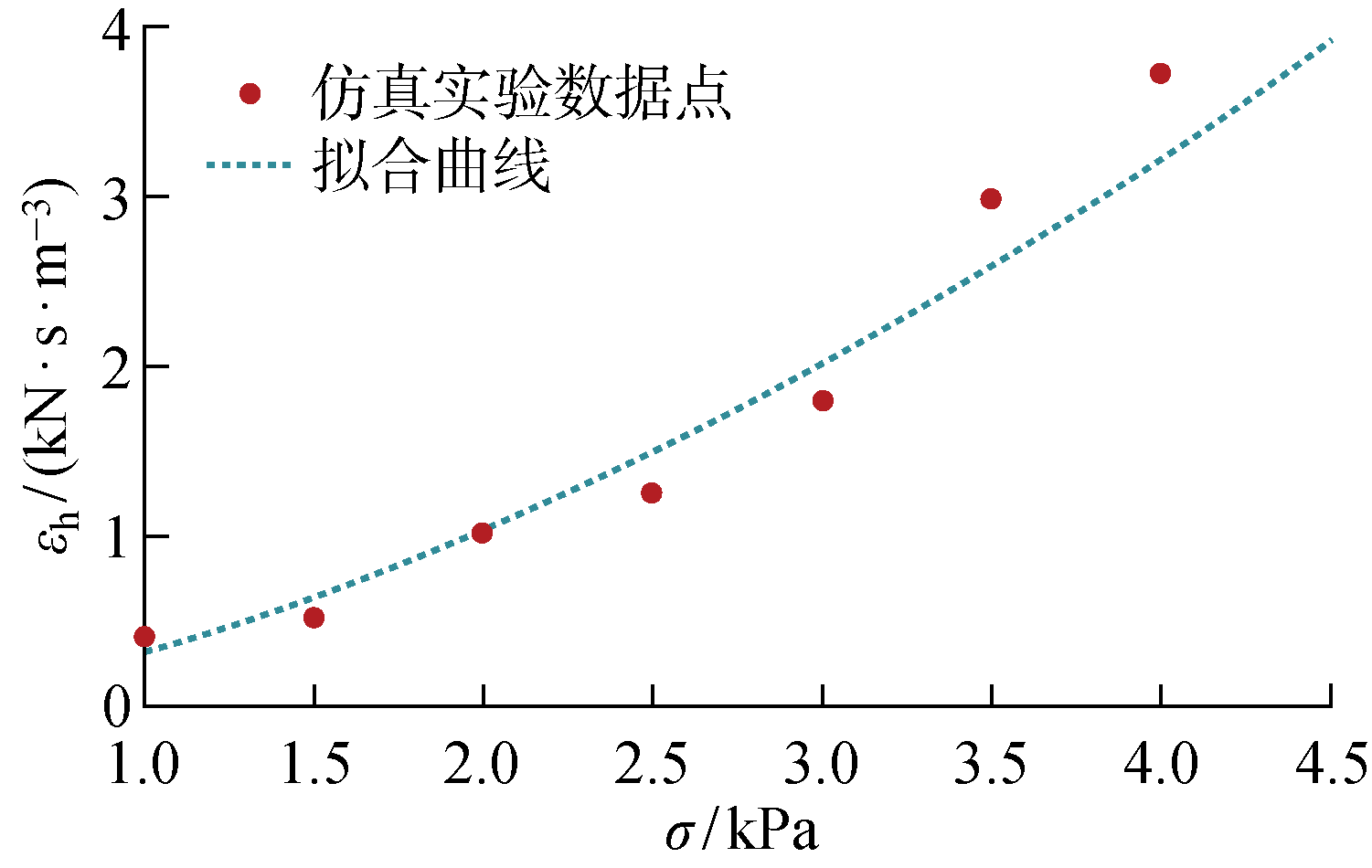
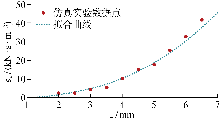
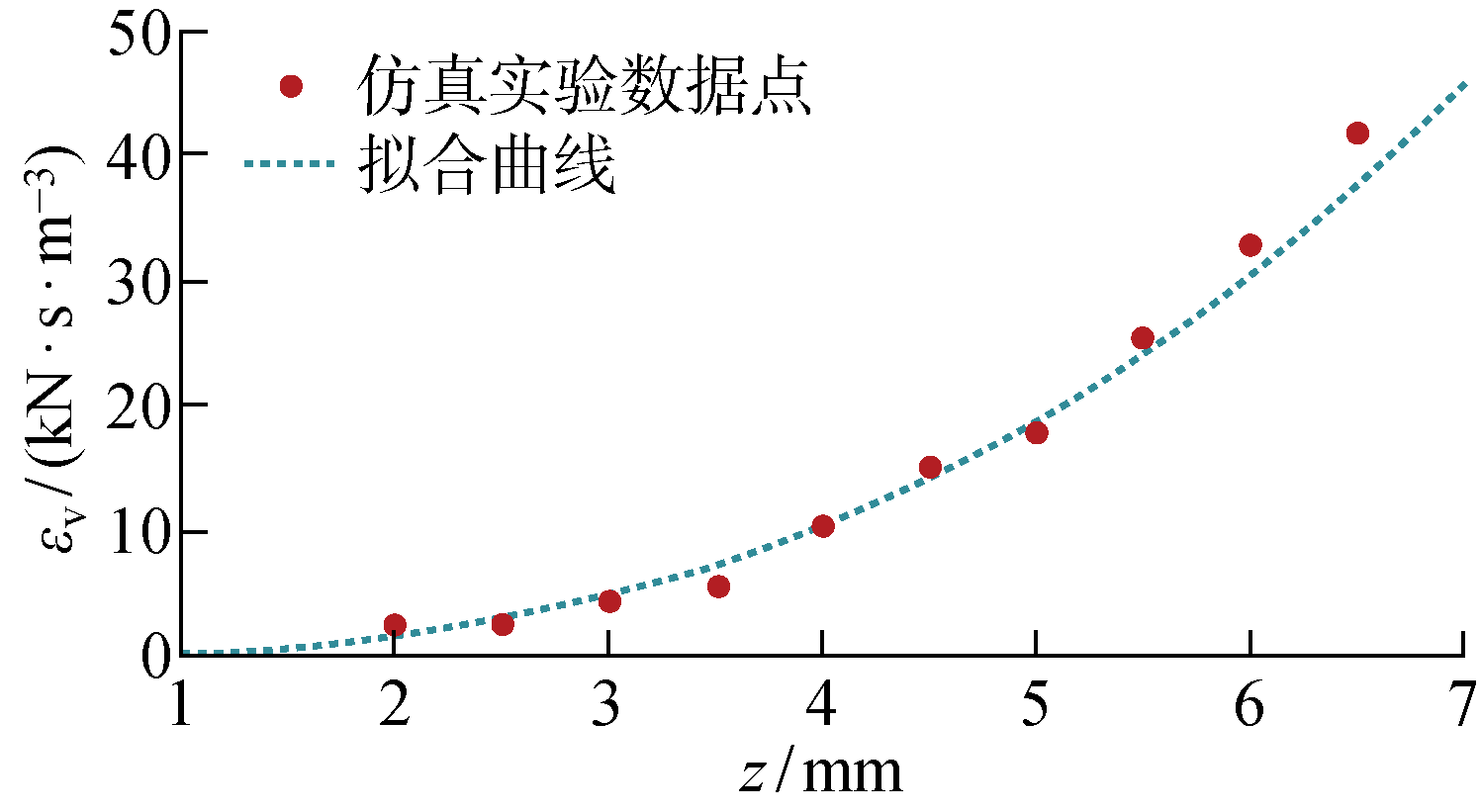
Fig.10
Fitting results of bearing simulation experiments
Tab.2
Mechanical properties of discrete elemental lunar soil
| 参数 | 取值 |
|---|---|
| k/mm | 2.912 |
| c/Pa | 189.4 |
| θ/(°) | 26.89 |
| K/[MN·m-(2+n)] | 599.7 |
| n | 2.513 4 |
| Ah/[{N}^{1+mh}·s·{m}^{-(3+mh)}] | 4.615 2×10-3 |
| mh | 1.622 5 |
| Av/[GN·s·{m}^{-(3+mv)}] | 23.353 |
| mv | 2.648 9 |
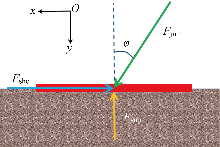
Fig.11
Contact model of the bottom plate and lunar soil
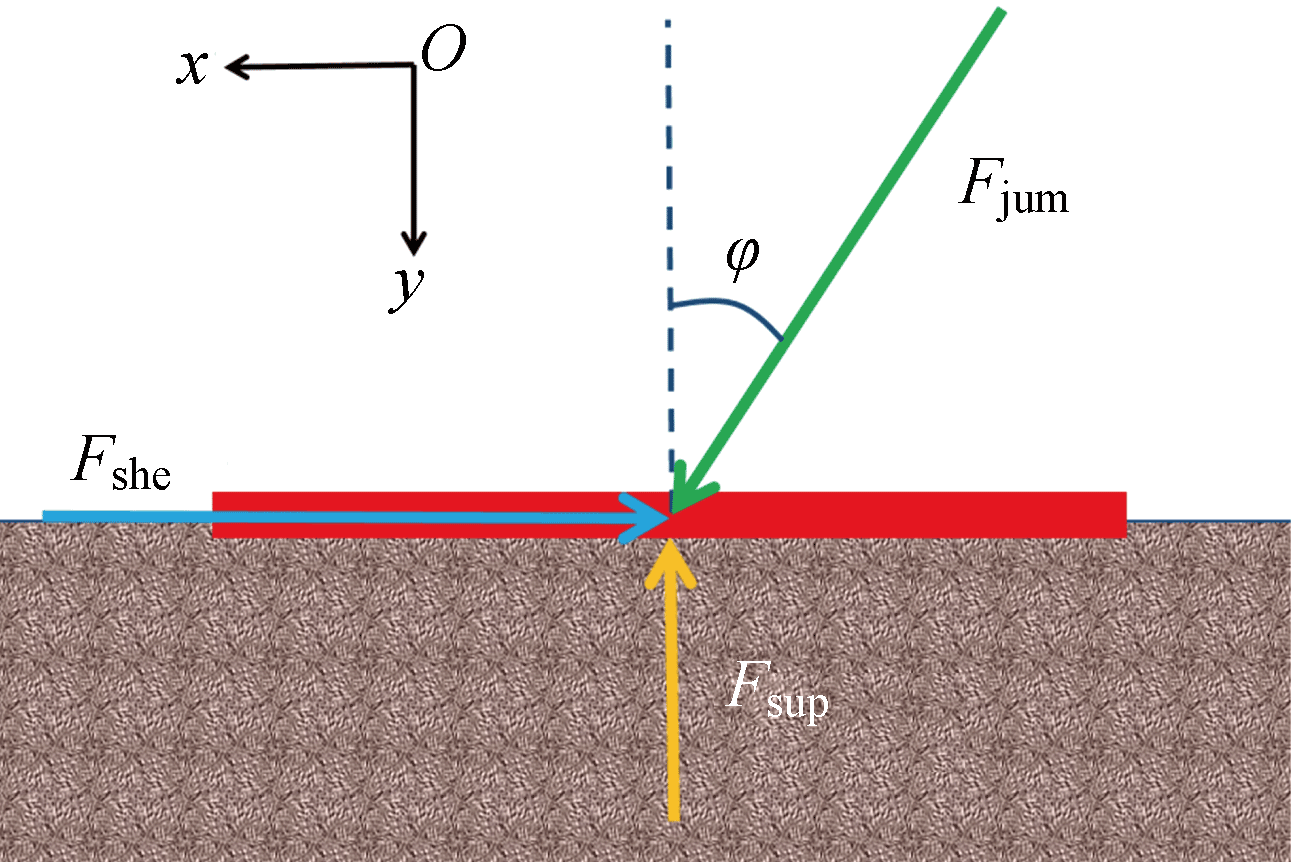
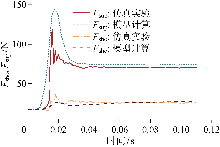
Fig.12
Comparison of the model calculation results and simulation results
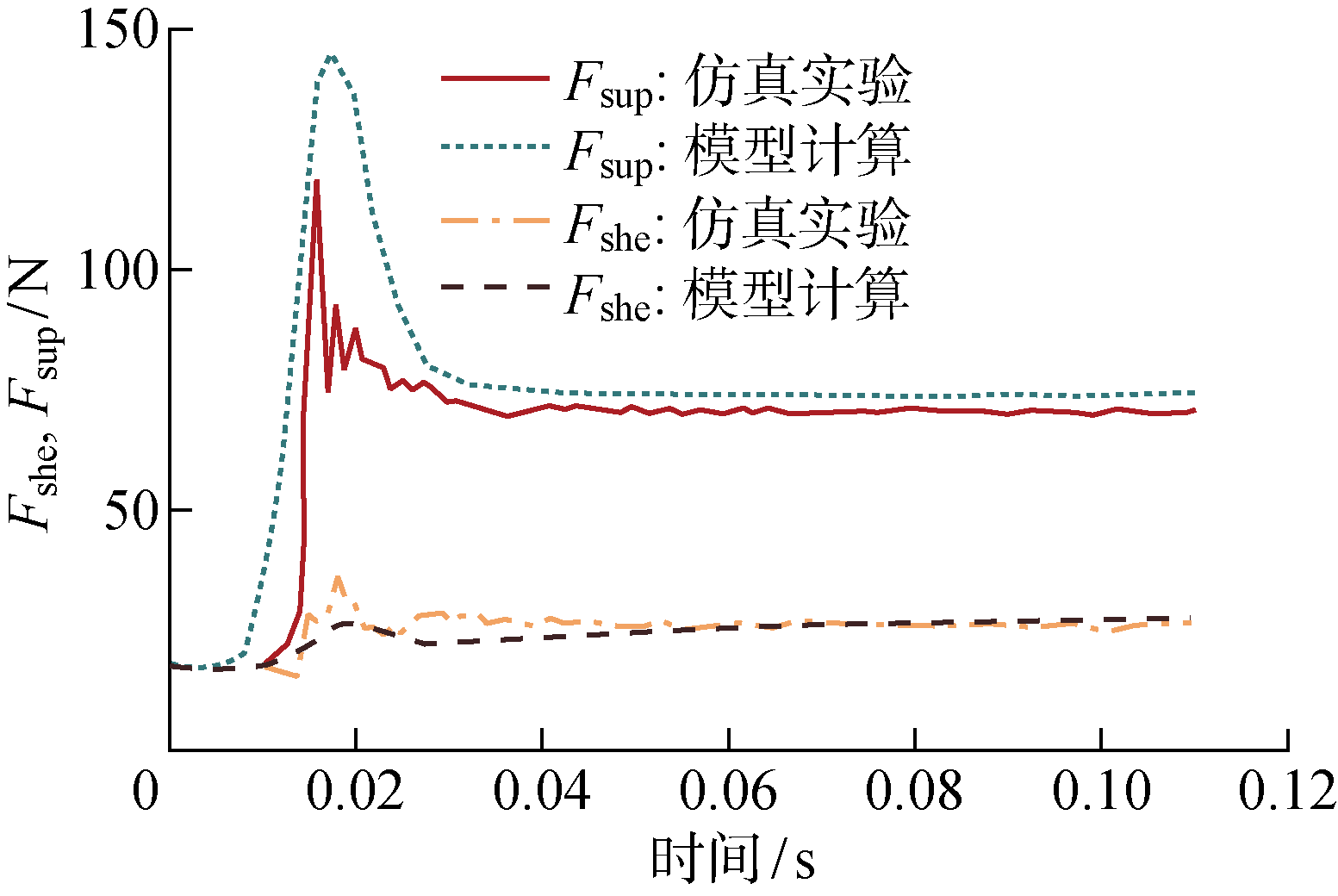
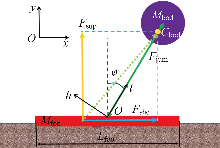
Fig.13
Dynamic model of the abstract robot

Fig.14
Coupling simulation of the robot take-off process

Fig.15
Comparison between the calculation results and the coupled simulation results of the dynamic model in the take-off process

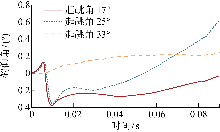
Fig.16
Variation of the robot pitch angle in the take-off process
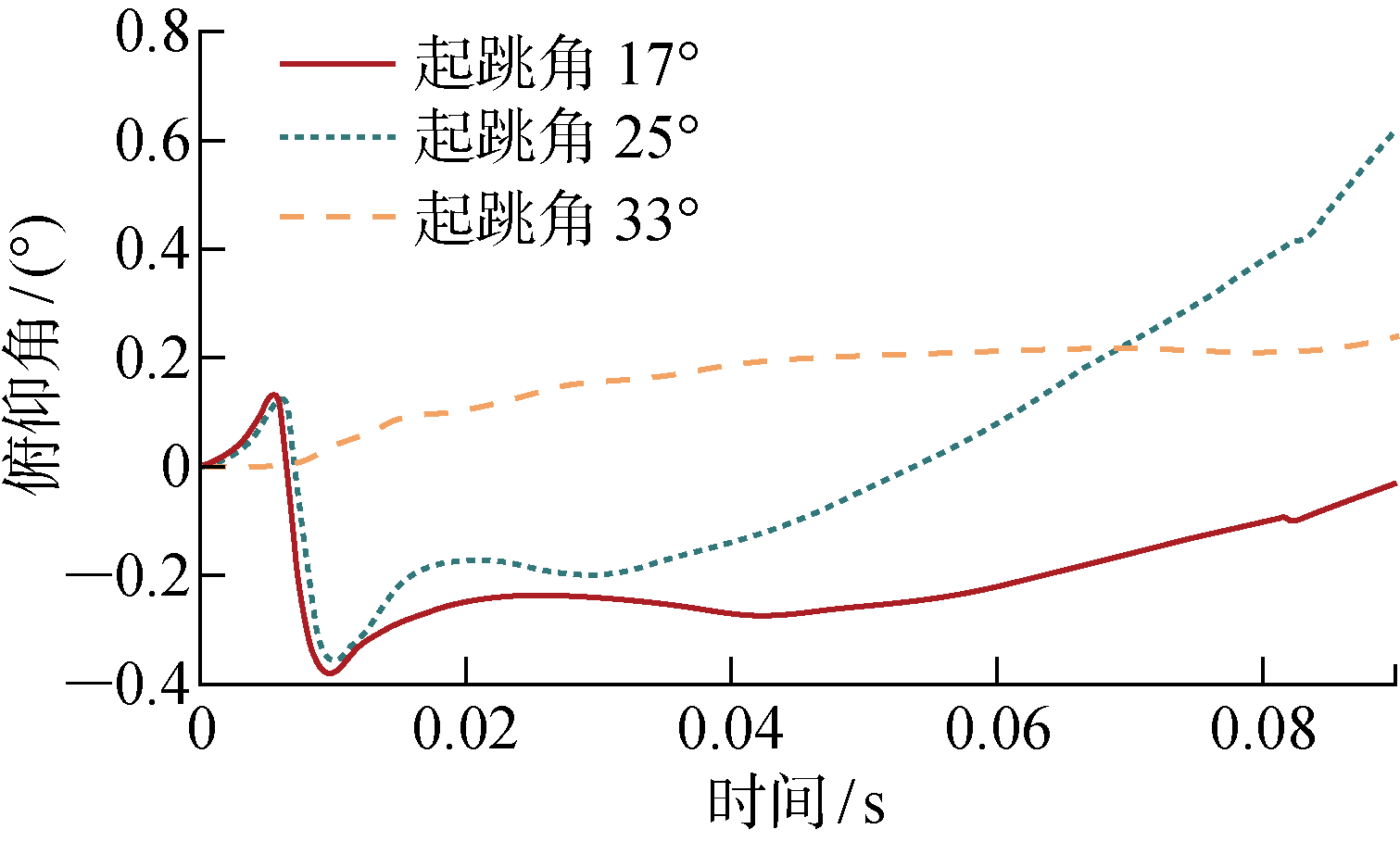

Fig.17
Optimization process of the energy storage solution
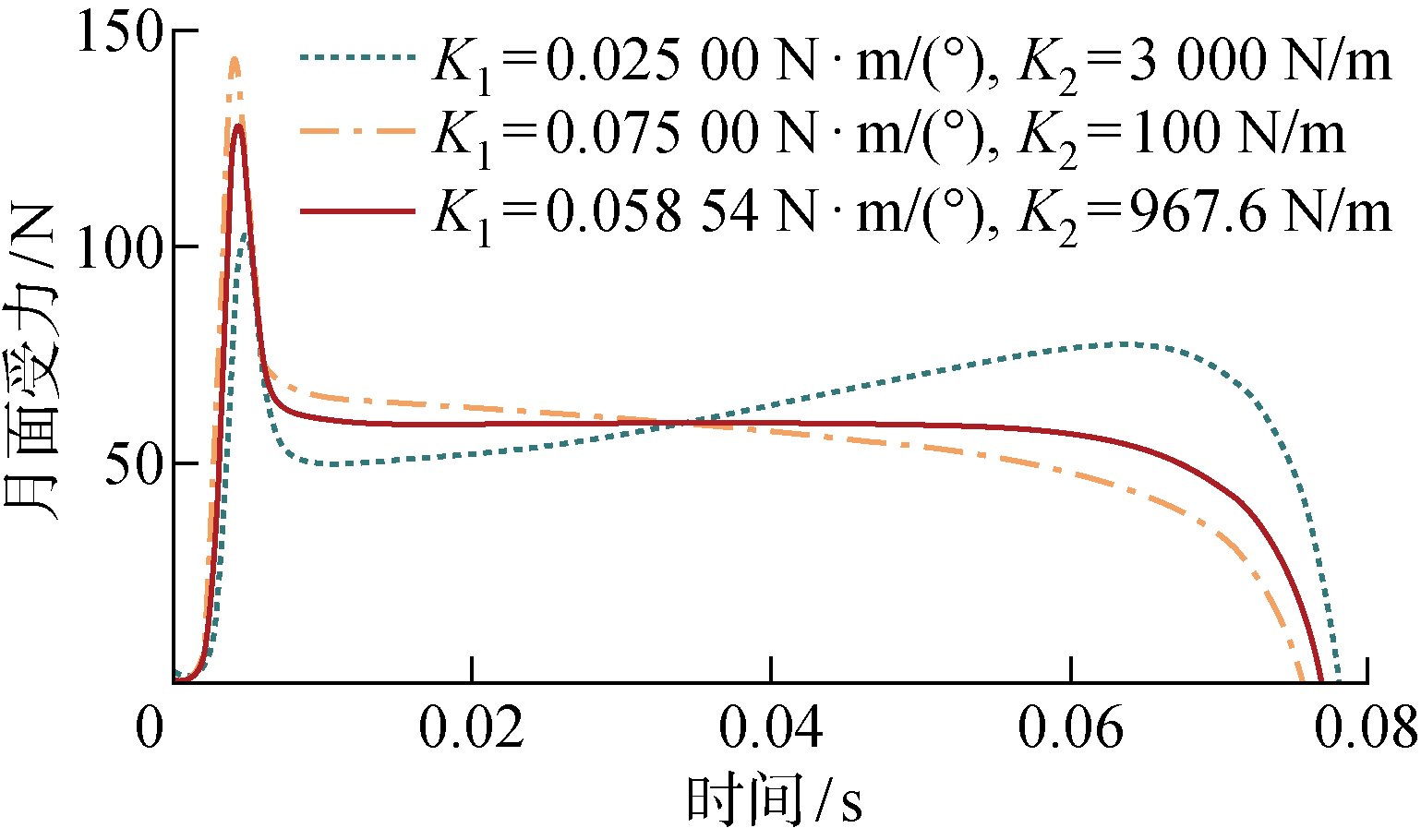
Fig.18
Comparison of theoretical results and simulation results of the robot’s lunar take-off dynamics
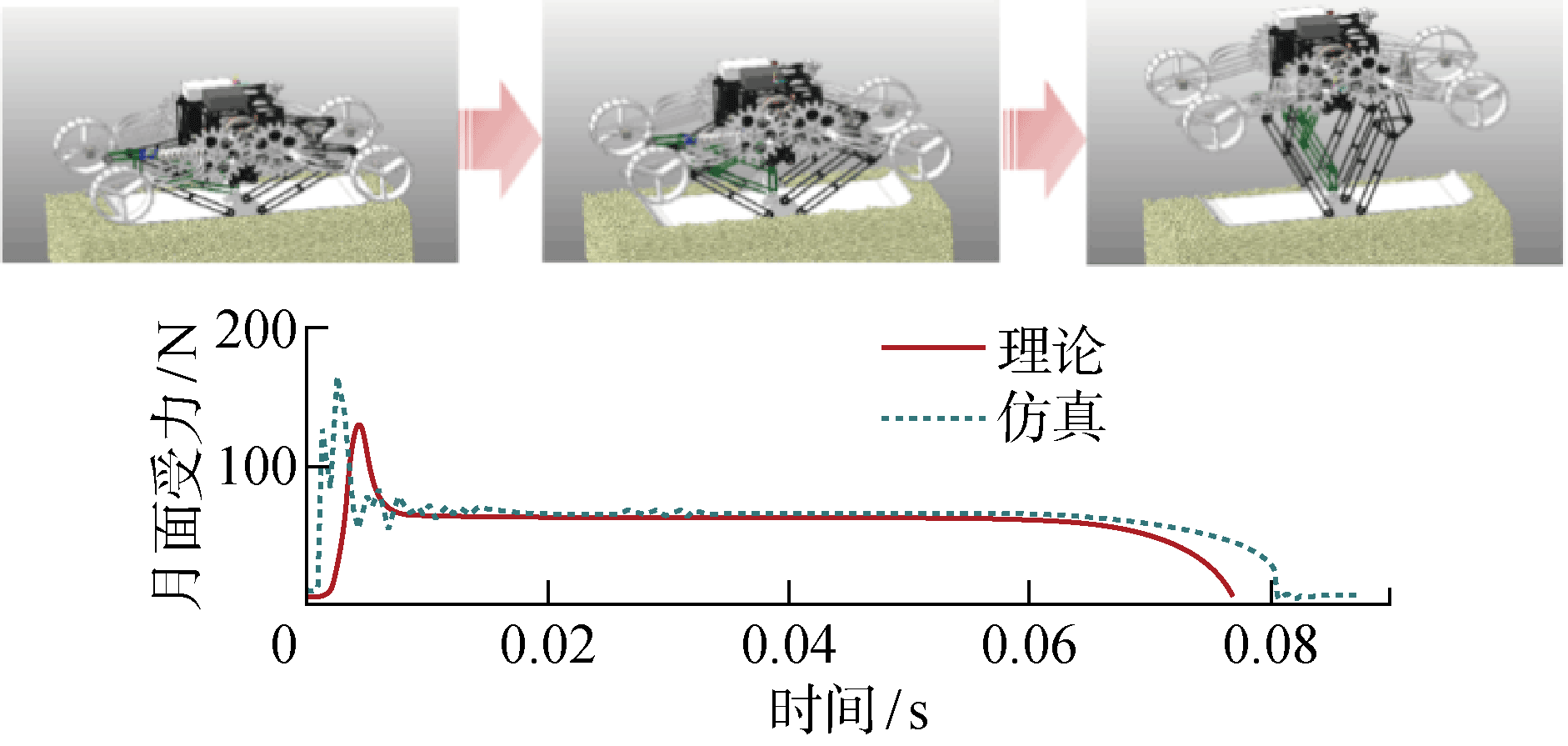
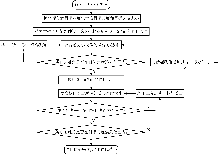
Fig.19
Flow chart of the motion planning algorithm for accurate jumping to the point
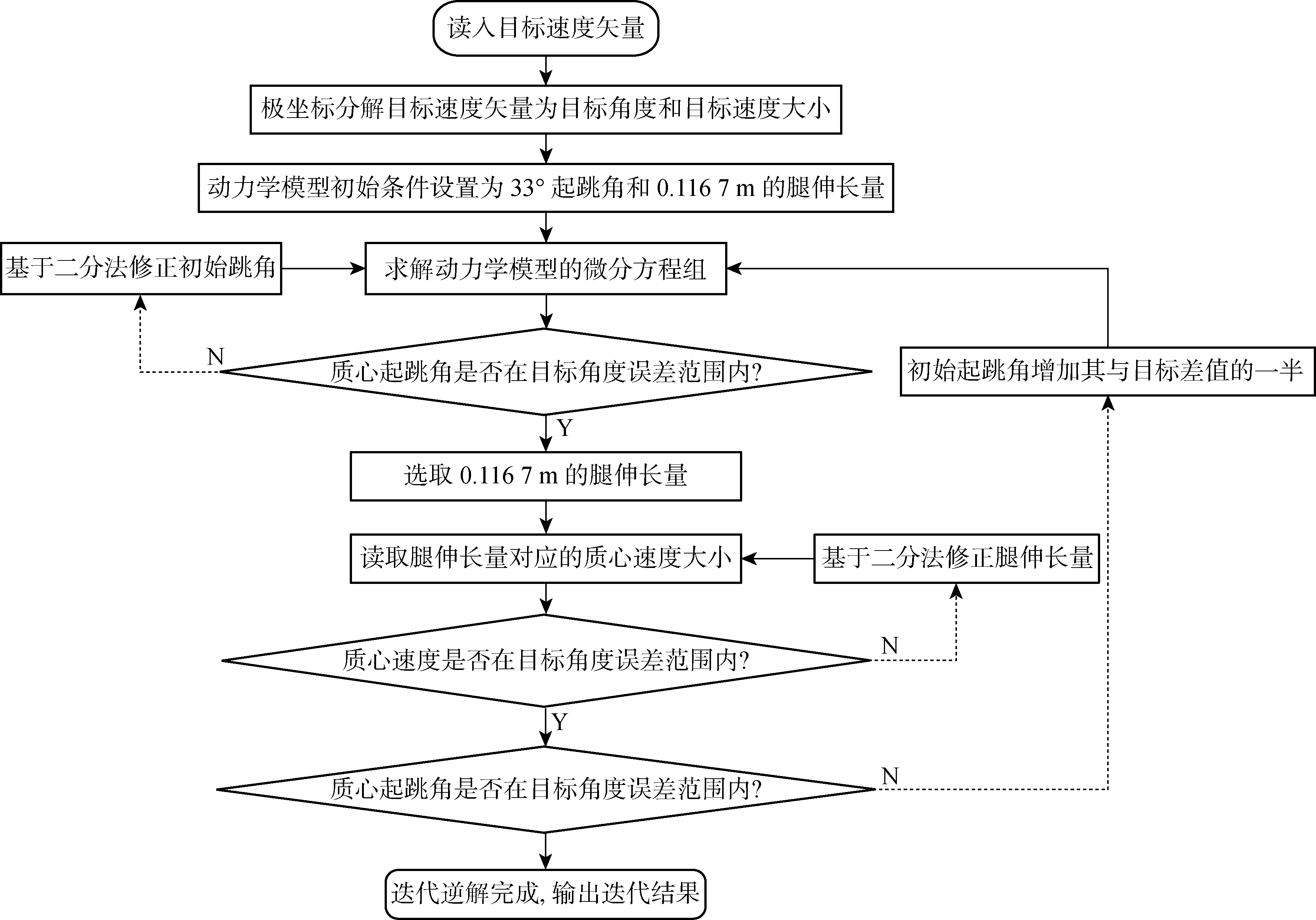
Fig.20
Flow chart of the motion planning algorithm for active buffering on the ground
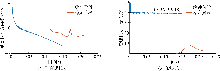
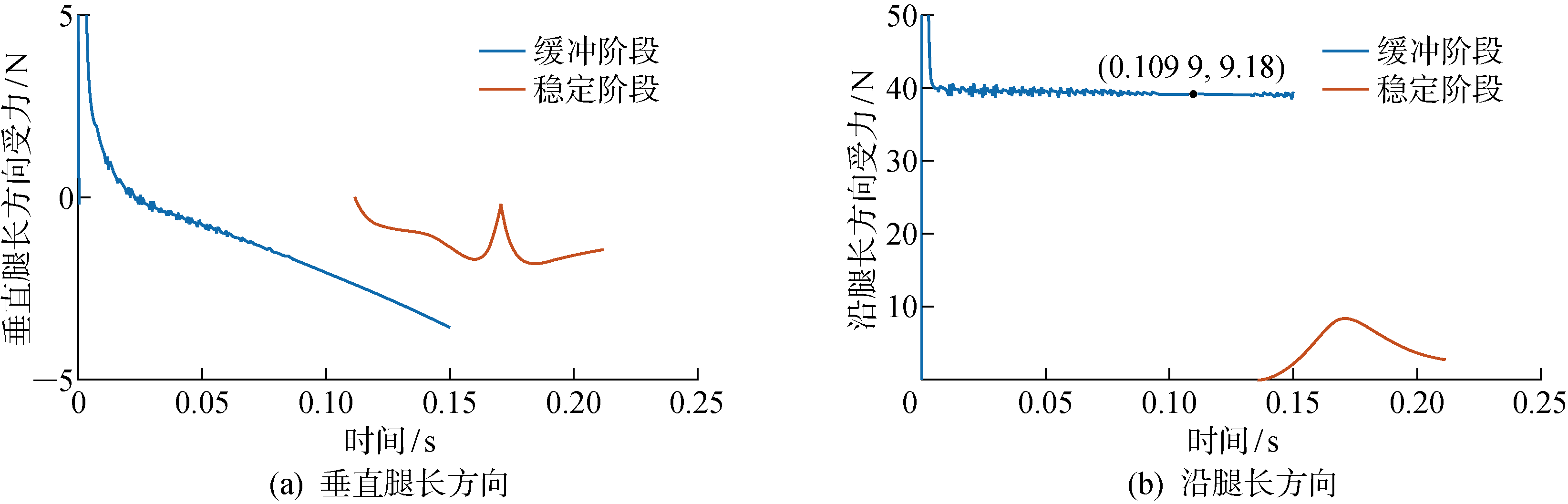
Fig.21
Results of external forces during active buffering of jumping robots
| [1] | 肖福根, 庞贺伟. 月球地质形貌及其环境概述[J]. 航天器环境工程, 2003(2): 5-14. |
| XIAO Fugen, PANG Hewei. An overview of lunar geological features and their environment[J]. Spacecraft Environmental Engineering, 2003(2): 5-14. | |
| [2] | 叶培建, 肖福根. 月球探测工程中的月球环境问题[J]. 航天器环境工程, 2006(1): 1-11. |
| YE Peijian, XIAO Fugen. Lunar environment problems in lunar exploration project[J]. Spacecraft Environmental Engineering, 2006(1): 1-11. | |
| [3] | 李贺, 王禹, 杜小振, 等. 一种可跳跃的月面移动机器人系统设计[J]. 深空探测学报(中英文), 2020, 7(3): 304-310. |
|
LI He, WANG Yu, DU Xiaozhen, et al. Design of a lunar mobile robot with jumping ability[J]. Journal of Deep Space Exploration, 2020, 7(3): 304-310.
doi: 10.15982/j.issn.2095-7777.2020.20191011011 |
|
| [4] | YOSHIKAWA K, OTSUKI M, KUBOTA T, et al. A new mechanism of smart jumping robot for lunar or planetary satellites exploration[C]// 2017 IEEE Aerospace Conference. Washington, D. C.,USA: IEEE, 2017: 1-7. |
| [5] | ACKERMAN E. Boston dynamics sand flea robot demonstrates astonishing jumping skills[J]. IEEE Spectrum Robotics Blog, 2012, 2(1): 1. |
| [6] | LI F, LIU W, FU X. Jumping like an insect:Design and dynamic optimization of a jumping mini robot based on bio-mimetic inspiration[J]. Mechatronics, 2012, 22(2): 167-176. |
| [7] | HALDANE D W, PLECNIK M M, YIM J K, et al. Robotic vertical jumping agility via series-elastic power modulation[J]. Science Robotics, 2016, 1(1): eaag2048. |
| [8] |
陈子明, 卢杰, 邓朋, 等. 基于弹尾虫运动机制的平衡轮式跳跃机器人的设计[J]. 机械工程学报, 2020, 56(17): 20-28.
doi: 10.3901/JME.2020.17.020 |
| CHEN Ziming, LU Jie, DENG Peng, et al. Design of balanced wheeled jumping robot based on the motion mechanism of springtail[J]. Chinese Journal of Mechanical Engineering, 2020, 56(17): 20-28. | |
| [9] | BOSWORTH W, WHITNEY J, KIM S, et al. Robot locomotion on hard and soft ground:Measuring stabili两个方向的位移,具有两个自由度.故定ty and ground properties in-situ[C]// International Conference on Robotics and Automation (ICRA). Washington, D. C., USA: IEEE, 2016: 3582-3589. |
| [10] | 马传帅, 文桂林, 周景宇, 等. 月球车沙地行驶动力学建模与仿真[J]. 机械工程学报, 2011, 47(23): 97-103. |
| MA Chuanshuai, WEN Guilin, ZHOU Jingyu, et al. Whole-vehicle dynamical model and simulation for lunar rover traveling on the loose soil[J]. Chinese Journal of Mechanical Engineering, 2011, 47(23): 97-103. | |
| [11] |
梁忠超, 王永富, 高海波, 等. 基于应力修正的载人月球车车轮侧向力模型研究[J]. 机械工程学报, 2017, 53(9): 14-21.
doi: 10.3901/JME.2017.09.014 |
| LIANG Zhongchao, WANG Yongfu, GAO Haibo, et al. Lateral force model of lunar roving vehicle’s wheel based on pressure modifying[J]. Chinese Journal of Mechanical Engineering, 2017, 53(9): 14-21. | |
| [12] | BEKKER M G. Theory of land locomotion: The mechanics of vehicle mobility[M]. Ann Arbor,USA: University of Michigan Press, 1956: 45-50. |
| [13] | 张宇, 陈善雄, 余飞, 等. 低应力水平下 CAS-1 模拟月壤力学特性试验研究[J]. 岩石力学与工程学报, 2015, 34(1): 174-181. |
| ZHANG Yu, CHEN Shanxiong, YU Fei, et al. Experimental study on mechanical properties of CAS-1 lunar soil under low stress[J]. Chinese Journal of Rock Mechanics and Engineering, 2015, 34(1): 174-181. | |
| [14] | 张宇, 余飞, 陈善雄, 等. CAS-1 模拟月壤动剪切模量与阻尼比的试验研究[J]. 岩土力学, 2014, 35(1): 74-82. |
| ZHANG Yu, YU Fei, CHEN Shanxiong, et al. Experimental study of dynamic shear modulus and damping ratio of CAS-1 lunar soil simulant[J]. Rock and Soil Mechanics, 2014, 35(1): 74-82. | |
| [15] | 黄晗, 吴宝广, 许述财, 等. 高密实度模拟月壤力学特性试验研究[J]. 农业工程学报, 2019, 35(1): 31-38. |
| HUANG Han, WU Baoguang, XU Shucai, et al. Test study on mechanical properties of lunar soil simulant under high compactness condition[J]. Transactions of the Chinese Society of Agricultural Engineering, 2019, 35(1): 31-38. | |
| [16] | 王康, 姚猛, 李立犇, 等. 基于月面表取采样触月压痕的月壤力学状态分析[J]. 吉林大学学报(工学版), 2021, 51(3): 1146-1152. |
| WANG Kang, YAO Meng, LI Liben, et al. Mechanical performance identification for lunar soil in lunar surface sampling[J]. Journal of Jilin University (Engineering and Technology Edition), 2021, 51(3): 1146-1152. | |
| [17] | 田野, 李晨昊, 李楠楠, 等. 基于应力波反射法的模拟月壤特性研究[J]. 机械制造, 2021, 59(11): 1-3. |
| TIAN Ye, LI Chenhao, LI Nannan, et al. Study on characteristics of simulated lunar soil based on stress wave reflection method[J]. Machinery, 2021, 59(11): 1-3. | |
| [18] | 邹猛, 李建桥, 贾阳, 等. 月壤静力学特性的离散元模拟[J]. 吉林大学学报(工学版), 2008(2): 383-387. |
| ZOU Meng, LI Jianqiao, JIA Yang, et al. Statics characteristics of lunar soil by DEM simulation[J]. Journal of Jilin University (Engineering and Technology Edition), 2008(2): 383-387. | |
| [19] |
林呈祥, 钟世英, 凌道盛. 模拟月壤颗粒形状特征及其对抗剪强度影响分析[J]. 东北大学学报(自然科学版), 2016, 37(11): 1640-1644.
doi: 10.12068/j.issn.1005-3026.2016.11.025 |
| LIN Chengxiang, ZHONG Shiying, LING Daosheng. Analysis of particle shape characteristics of lunar soil simulant and its effect on shear strength[J]. Journal of Northeastern University (Natural Science), 2016, 37(11): 1640-1644. | |
| [20] | 林云成, 李立犇, 赵振家, 等. 着陆器足垫冲击月壤动态行为离散元仿真分析[J]. 深空探测学报, 2020, 7(2): 171-177. |
|
LIN Yuncheng, LI Liben, ZHAO Zhenjia, et al. Simulation analysis of dynamic behavior of lander footpad impact on lunar regolith[J]. Journal of Deep Space Exploration, 2020, 7(2): 171-177.
doi: 10.15982/j.issn.2095-7777.2020.20190313002 |
|
| [21] | 黄雨, 蒋馥鸿. 月壤工程地质特性综述[J]. 同济大学学报(自然科学版), 2013, 41(9): 1281-1285. |
| HUANG Yu, JIANG Fuhong. Review of engineer geological characteristics of lunar regolith[J]. Journal of Tongji University (Natural Science), 2013, 41(9): 1281-1285. | |
| [22] | 郑永春, 欧阳自远, 王世杰, 等. 月壤的物理和机械性质[J]. 矿物岩石, 2004(4): 14-19. |
| ZHENG Yongchun, OUYANG Ziyuan, WANG Shijie, et al. Physical and mechanical properties of lunar regolith[J]. Mineralogy and Petrology, 2004(4): 14-19. |
| [1] | XIAO Jiaguangyi, XIAO Zhicheng, TANG Xu, ZHANG Yukun, GUO Shuyu. A Fan Blade-Flexible Casing Rubbing Dynamic Model and Its Application [J]. Journal of Shanghai Jiao Tong University, 2026, 60(3): 499-510. |
| [2] | TANG Jianguo1, 2, MAO Jinghang1, 2, LIU Mingyue1, 2. Design and Hierarchical Sliding Mode Path Tracking of Deep-Sea Lander with Rudder [J]. Ocean Engineering Equipment and Technology, 2025, 12(1): 106-118. |
| [3] | SUN Jian, PENG Bin, ZHU Bingguo. Numerical Simulation and Experimental Study of Oil-Free Double-Warp Air Scroll Compressor [J]. Journal of Shanghai Jiao Tong University, 2022, 56(5): 611-621. |
| [4] | JIANG Junhao, CHEN Gang. Dynamic Model Predictive Control Method for Steering Control of Driving Robot [J]. Journal of Shanghai Jiao Tong University, 2022, 56(5): 594-603. |
| [5] | LI Yanbiao∗ (李研彪), CHEN Ke (陈 科), SUN Peng (孙 鹏), WANG Zesheng (王泽胜). Dynamic Modeling and Performance Evaluation of a Novel Humanoid Ankle Joint [J]. J Shanghai Jiaotong Univ Sci, 2022, 27(4): 570-578. |
| [6] | WANG Kefan, QIU Xiaoqi, GAO Changsheng, JING Wuxing. A Lateral⁃Directional Moving-Mass Control Technology for Near Space Solar-Powered UAV [J]. Air & Space Defense, 2021, 4(4): 29-36. |
| [7] | KANG Youwei, WANG Feng, CHEN Dongfang, SHEN Li. Dynamic Modeling and Analysis of Gyro-stabilized Seeker [J]. Air & Space Defense, 2019, 2(3): 59-65. |
| [8] | ZHENG Yuxin,XI Ying,YUAN Lang,BU Wanghui. Elastodynamics Analysis of Pure Torsional Model of Spur Gear [J]. Journal of Shanghai Jiaotong University, 2019, 53(3): 285-296. |
| [9] | LI Lina,YU Haidonga,b,TAO Jianfenga,LIU Chenglianga. Vibration Performance Analysis for the Gripper Cylinder of Tunnel Boring Machine with Variable Stiffness [J]. Journal of Shanghai Jiao Tong University, 2017, 51(9): 1058-1064. |
| [10] |
XIAO Yao,RUAN Xiaogang,WEI Ruoyan.
An Optimal Fuel Guidance Law for Lunar SoftLanding Based on ThreeDimensional Dynamic Model [J]. Journal of Shanghai Jiao Tong University, 2017, 51(6): 734-740. |
| [11] | Liu P.; Guo S.; Cai G.. Dynamic modeling and active control of a strap-on launch vehicle [J]. J Shanghai Jiaotong Univ Sci, 2016, 21(4): 385-394. |
| [12] | YANG Ke (杨柯), WANG Xu-yang* (王旭阳), GE Tong (葛彤), WU Chao (吴超). Simulation Platform for the Underwater Snake-Like Robot Swimming Based on Kane’s Dynamic Model and Central Pattern Generator [J]. Journal of shanghai Jiaotong University (Science), 2014, 19(3): 294-301. |
| [13] | YANG Ke (杨 柯), WANG Xu-yang* (王旭阳), GE Tong (葛 彤), WU Chao (吴 超). A Dynamic Model of an Underwater Quadruped Walking Robot Using Kane’s Method [J]. Journal of shanghai Jiaotong University (Science), 2014, 19(2): 160-168. |
| [14] | YANG Ke (杨 柯), WANG Xu-yang* (王旭阳), GE Tong (葛 彤), WU Chao (吴 超). Dynamic Model of Underwater Snake-Like Robot Using Kane’s Method [J]. Journal of shanghai Jiaotong University (Science), 2014, 19(2): 146-154. |
| [15] | WANG Xuyang,GE Tong,YANG Ke,WU Chao. Dynamic Modeling of Underwater Self-Reconfigurable Robot with Kane’s Method [J]. Journal of Shanghai Jiaotong University, 2013, 47(12): 1874-1880. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||