Journal of Shanghai Jiao Tong University ›› 2023, Vol. 57 ›› Issue (8): 972-980.doi: 10.16183/j.cnki.jsjtu.2022.076
• Naval Architecture, Ocean and Civil Engineering • Previous Articles Next Articles
CAO Tian, ZHANG Xianku( )
)
Received:2022-03-22
Revised:2022-07-23
Accepted:2022-07-27
Online:2023-08-28
Published:2023-08-31
CLC Number:
CAO Tian, ZHANG Xianku. Nonlinear Feedback Control of MIMO Unstable System for Ship Longitudinal Motion[J]. Journal of Shanghai Jiao Tong University, 2023, 57(8): 972-980.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2022.076

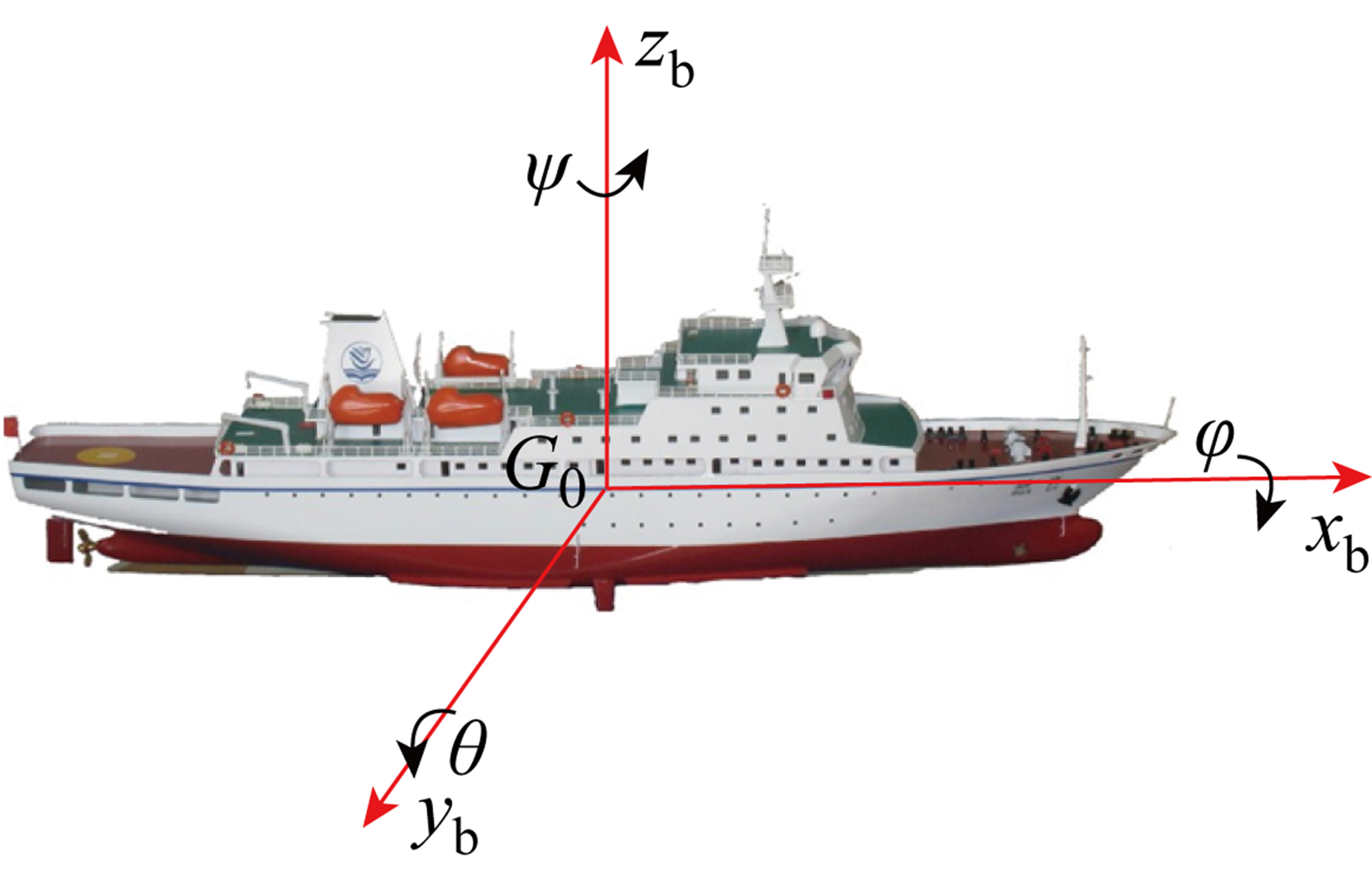
Fig.1
Motion coordinate system of “YUKUN” ship
Tab.1
Parameters of “YUKUN” ship
| 参数 | 满载取值 | 参数 | 满载取值 |
|---|---|---|---|
| 两柱间长L/m | 105 | 航速v/kn | 16.7 |
| 船宽B/m | 18 | 排水体积Δ/m3 | 5735.5 |
| 重心距船舯距离xc | -0.51 | 船舯吃水dM/m | 5.2 |
| 舵叶面积AR/m2 | 11.46 | 方形系数Cb | 0.5595 |
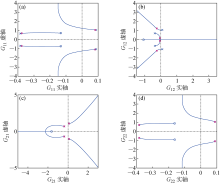
Fig.2
Root trajectories of open-loop transfer functions of the system
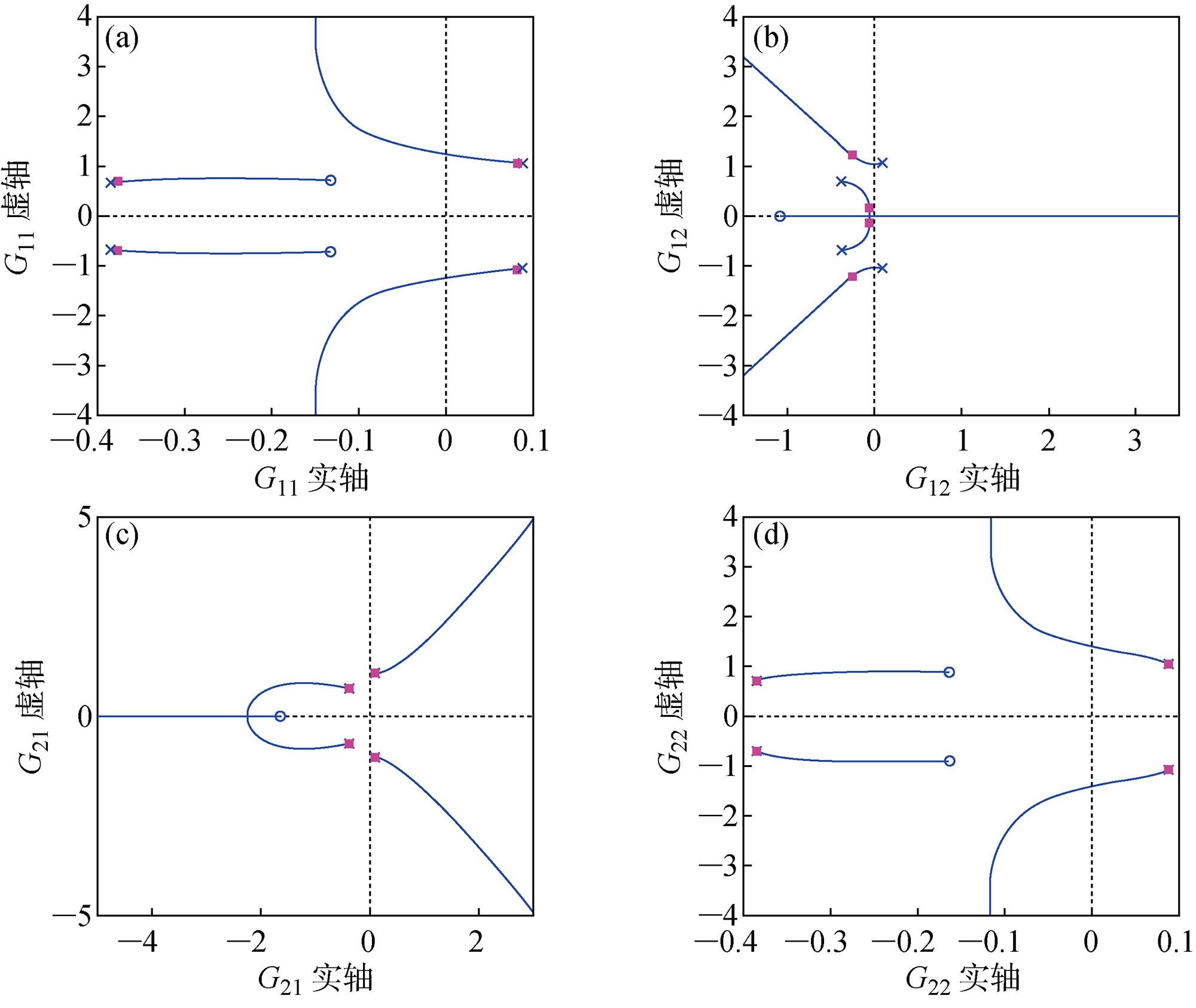

Fig.3
Root locus diagram of generalized controlled plant after forming
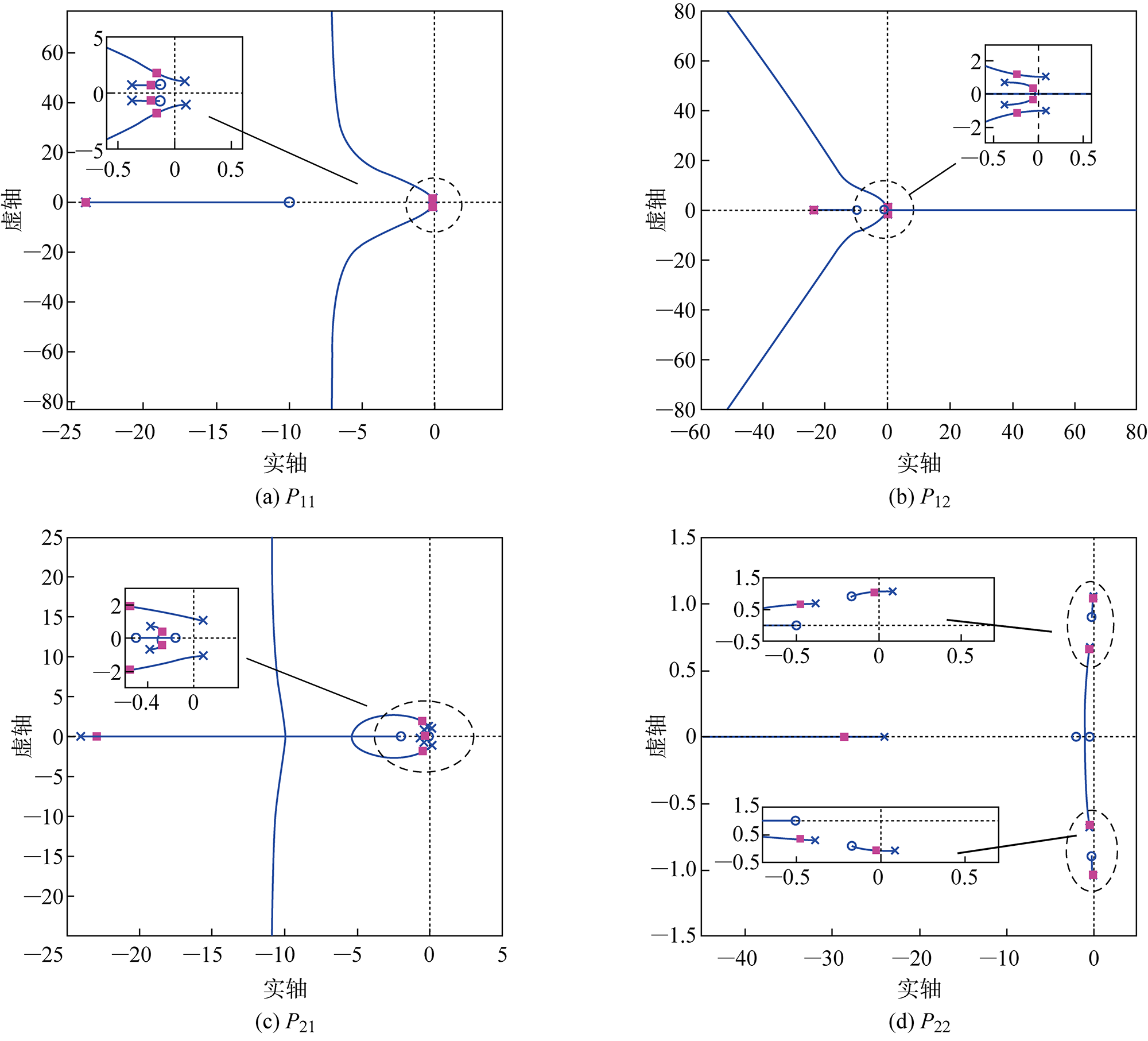

Fig.4
Design diagram of a concise robust controller
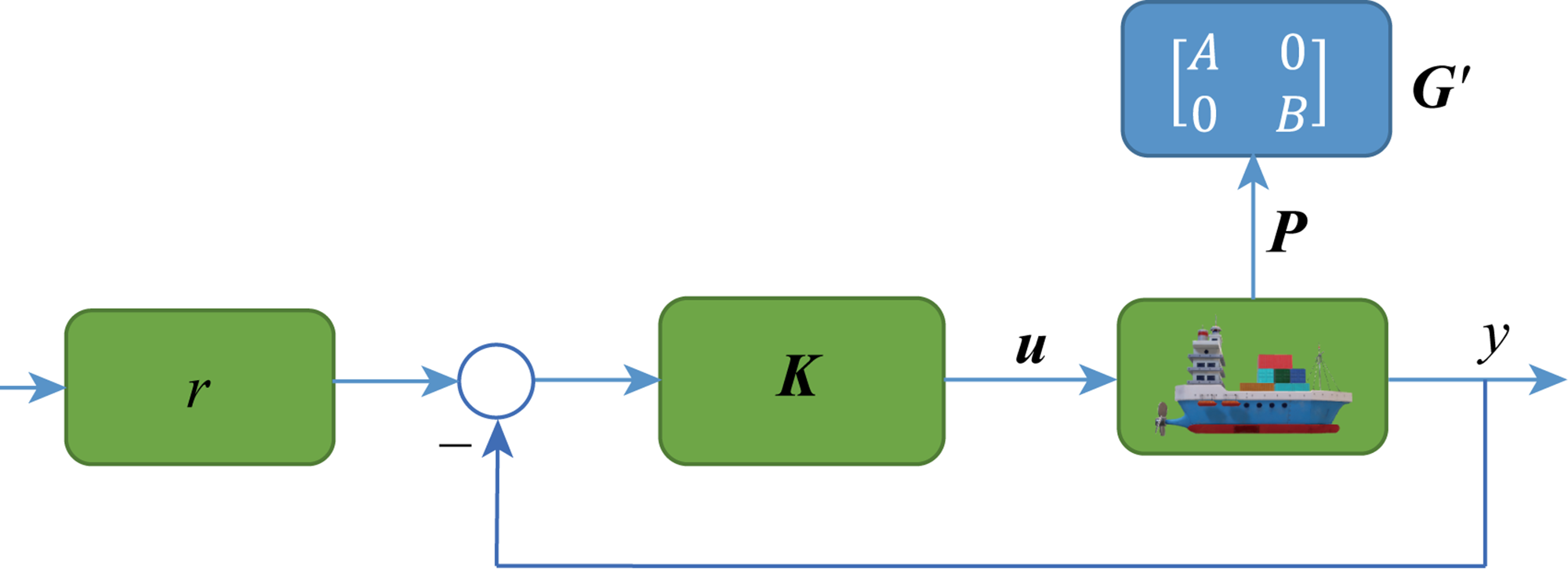

Fig.5
Nonlinear feedback structure driven by bipolar S-function


Fig.6
Verification of model stability

Fig.7
Simulink validation
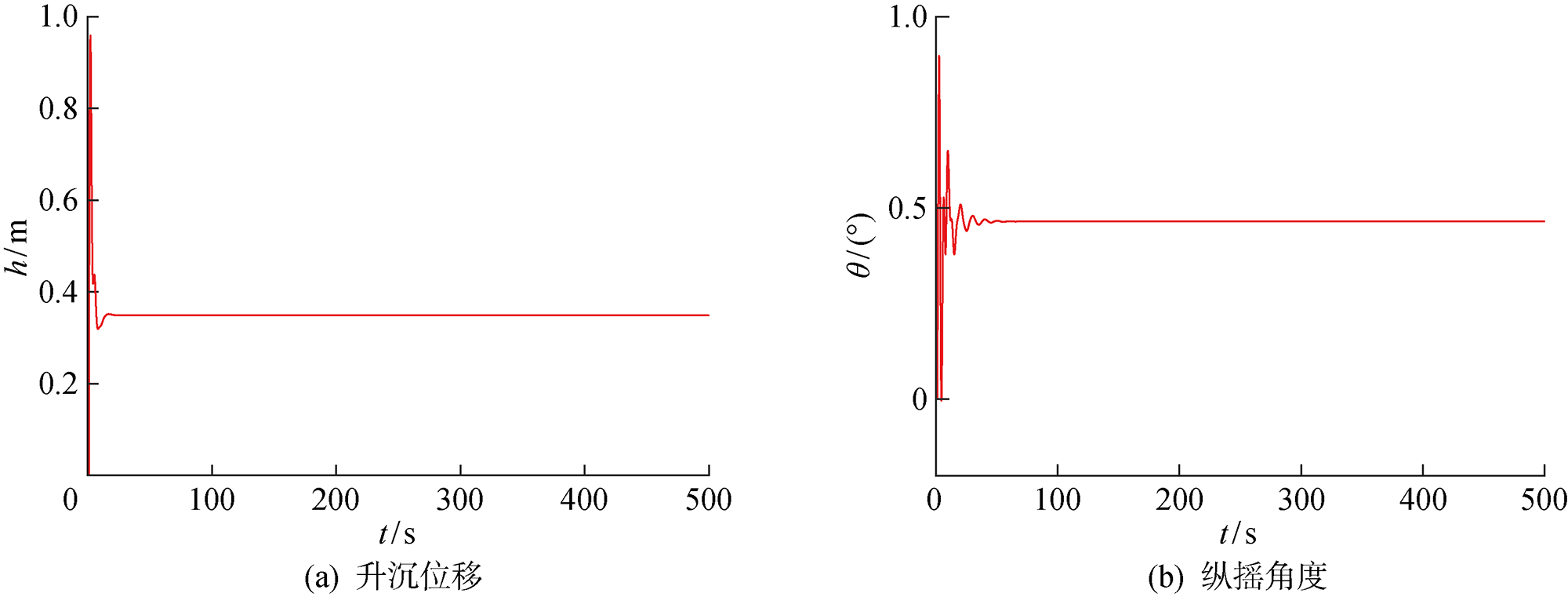

Fig.8
Comparison control effect without adding nonlinear feedback function
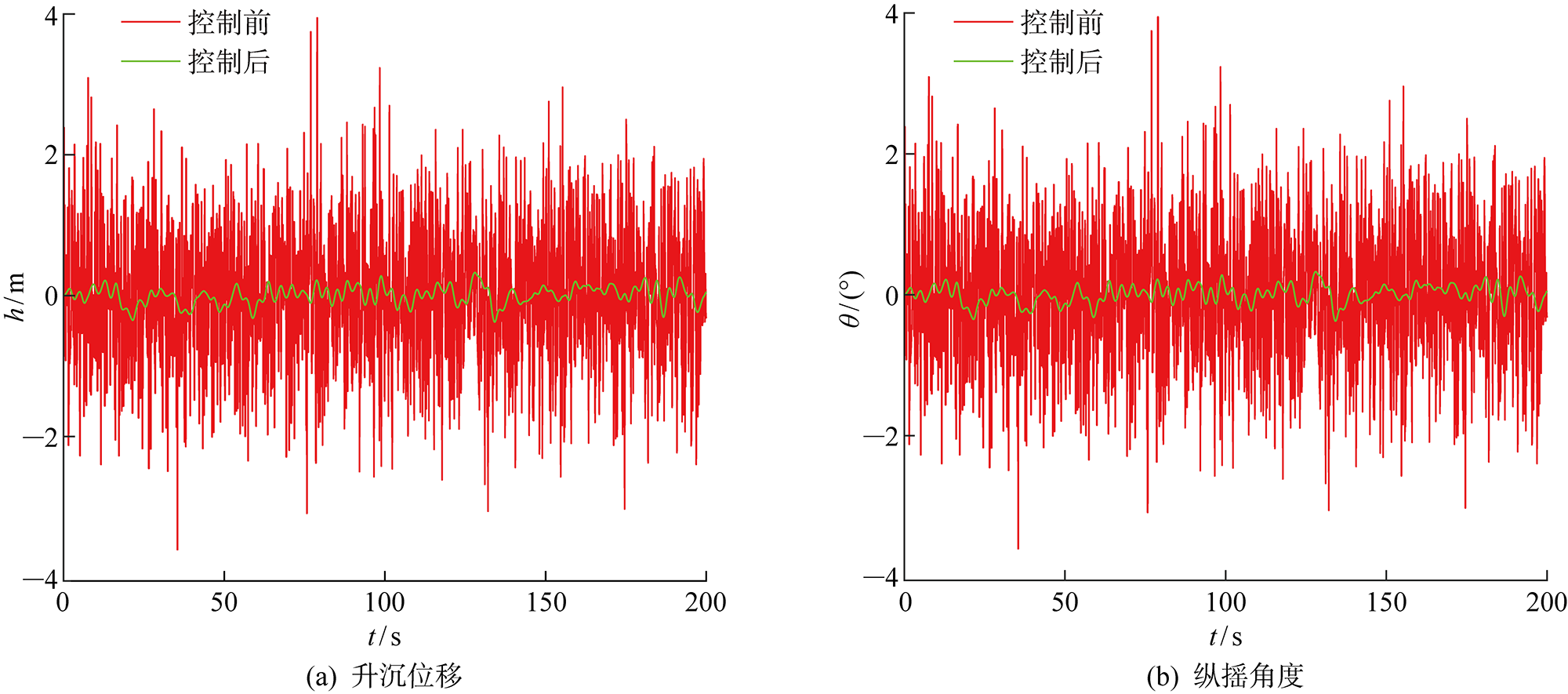

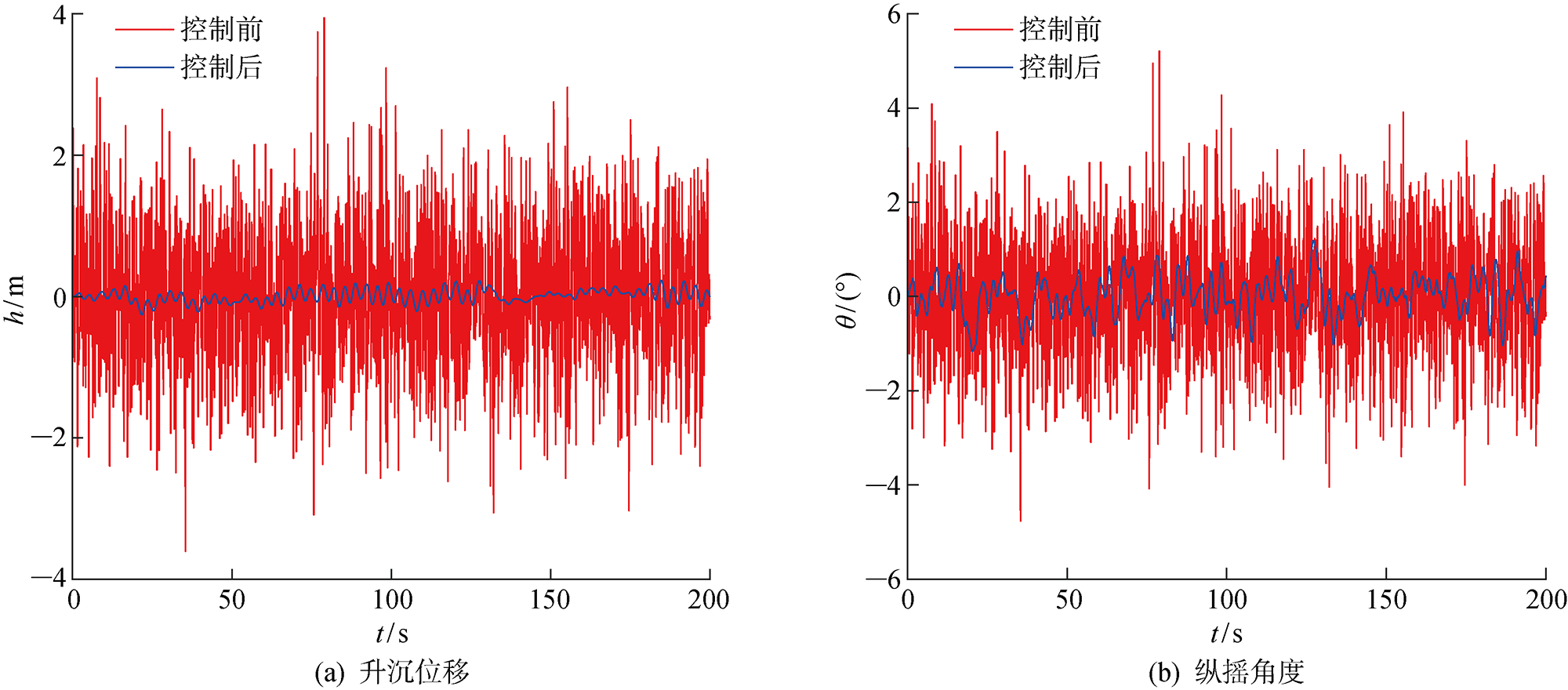
Fig.9
Comparison control effect of adding nonlinear feedback function
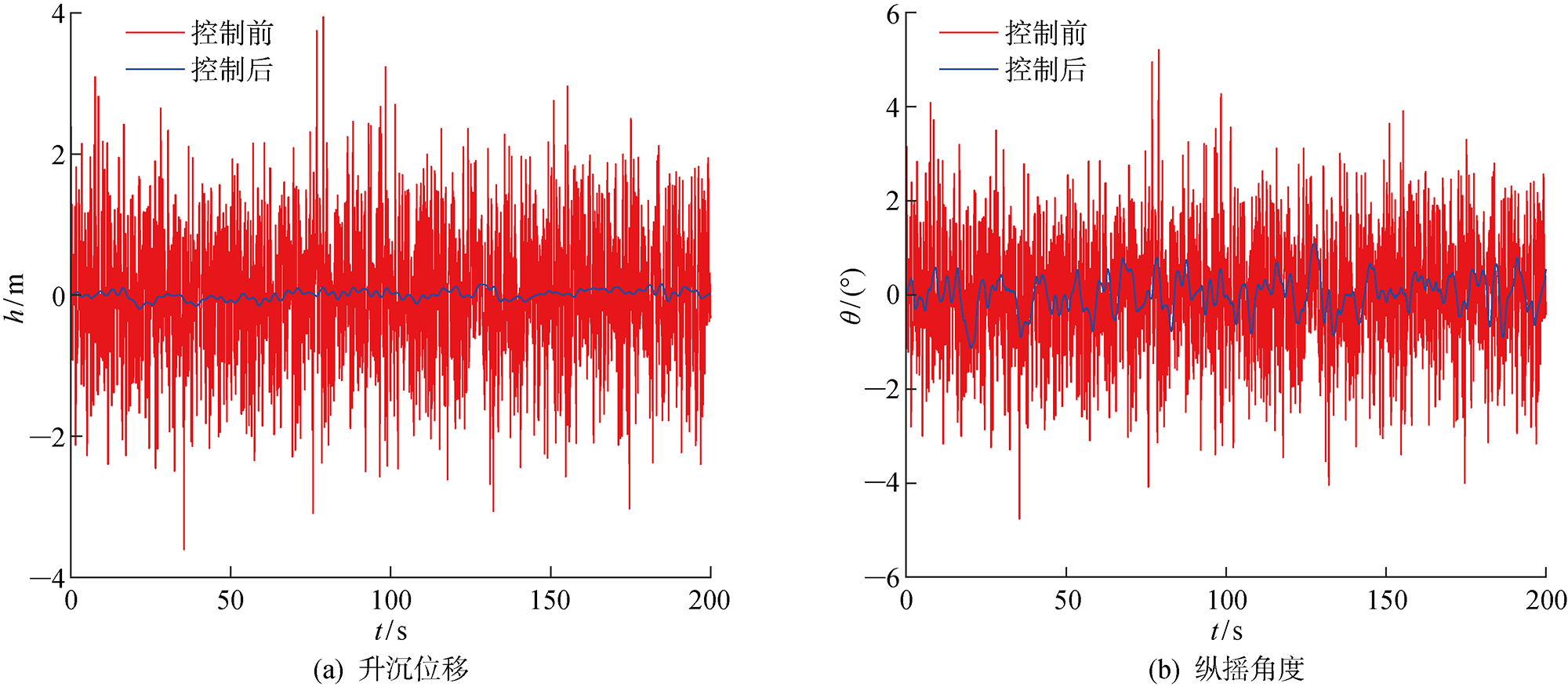
Tab.2
Performance comparison of closed-loop
| 控制方法 | θmax/(°) | hmax/m | eTDDE | eTPAE |
|---|---|---|---|---|
| 被控之前 | 5.21 | 3.94 | 11.72 | 15.48 |
| 加入鲁棒控制器 | 2.43 | 0.33 | 1.44 | 9.73 |
| 非线性反馈改进 鲁棒控制器 | 1.09 | 0.16 | 0.78 | 4.35 |

Fig.10
Simulation results when the model generates perturbations
| [1] | 张显库, 韩旭. 大型油轮艏摇混沌现象的仿真与滑模控制[J]. 上海交通大学学报, 2021, 55(1): 40-47. |
| ZHANG Xianku, HAN Xu. Modeling and sliding mode control for chaotic yawing phenomenon of large oil tanker[J]. Journal of Shanghai Jiao Tong University, 2021, 55(1), 40-47. | |
| [2] |
ISLAM M M, SIFFAT S A, AHMAD I. Robust integral backstepping and terminal synergetic control of course keeping for ships[J]. Ocean Engineering, 2021, 221: 108532.
doi: 10.1016/j.oceaneng.2020.108532 URL |
| [3] |
DO K D. Global robust adaptive path-tracking control of underactuated ships under stochastic disturbances[J]. Ocean Engineering, 2016, 111: 267-278.
doi: 10.1016/j.oceaneng.2015.10.038 URL |
| [4] | 涂建军, 何汉林. 反步鲁棒镇定及其在舵减横摇中的应用[J]. 华中科技大学学报, 2012, 40(7): 19-23. |
| TU Jianjun, HE Hanlin. Back-steeping robust stabilization and its application in rudder roll stabilization[J]. Journal of Huazhong University of Science and Technology, 2012, 40(7): 19-23. | |
| [5] | 胡波, 沈继红, 李大龙, 等. 船舶纵摇-升沉运动系统的解耦[J]. 华中科技大学学报, 2011, 39(11): 19-23. |
| HU Bo, SHEN Jihong, LI Dalong, et al. The decoupling of ship pitching and heaving motion[J]. Journal of Huazhong University of Science and Technology, 2011, 39(11): 19-23. | |
| [6] | 孙一方, 宗智, 姜宜辰. 船舶在波浪上纵向运动与控制研究综述[J]. 中国舰船研究, 2020, 15(1): 1-12. |
| SUN Yifang, ZONG Zhi, JIANG Yichen. Review of longitudinal motion and control of ships on waves[J]. Chinese Journal of Ship Research, 2020, 15(1): 1-12. | |
| [7] |
VAZQUEZ-GUERRA R J, MARQUEZ-RUBIO J F, NOVELLA-RODRÍGUEZ D F. Control of unstable delayed recycling systems[J]. Asia-Pacific Journal of Chemical Engineering, 2019, 14(2): e2290.
doi: 10.1002/apj.v14.2 URL |
| [8] | 蒋起峰. 结构不稳定系统的智能控制方法及其应用[J]. 农业装备与车辆工程, 2021, 59(1): 72-75. |
| JIANG Qifeng. Intelligient control method of structurally unstable system and its application[J]. Agricultural Equipment & Vehicle Engineering. 2021, 59(1): 72-75. | |
| [9] | CAO J, ZHANG X, YANG G. Robust control of pressure for LNG carrier cargo handling system via mirror-mapping approach[J]. Complexity, 2018, 2018: 1-11. |
| [10] |
ZHANG X, HAN X, GUAN W. Improvement of integrator backstepping control for ships with concise robust control and nonlinear decoration[J]. Ocean Engineering, 2019, 189: 106349.
doi: 10.1016/j.oceaneng.2019.106349 URL |
| [11] |
MIN B, ZHANG X, WANG Q. Energy saving of course keeping for ships using CGSA and nonlinear decoration[J]. IEEE Access, 2020, 8: 141622-141631.
doi: 10.1109/Access.6287639 URL |
| [12] | 张显库. 基于非线性反馈的水翼艇纵向运动鲁棒控制[J]. 中国航海, 2016, 39(1): 60-63. |
| ZHANG Xianku. Robust control of longitudinal motion for hydrofoils based on nonlinear feedback[J]. Navigation of China. 2016, 39(1): 60-63. | |
| [13] |
WANG H D, QIAN P, LIANG X F. Vertical plane motion control of an S-SWATH vehicle with flapping foil stabilisers sailing in waves[J]. Ocean Engineering, 2016, 121: 184-195.
doi: 10.1016/j.oceaneng.2016.05.004 URL |
| [14] | 张显库. 船舶运动简捷鲁棒控制[M]. 北京: 科学出版社, 2012. |
| ZHANG Xianku. Simple and robust control of ship motion[M]. Beijing: Science Press, 2012. | |
| [15] |
ZHANG X K, ZHANG Q, REN H X. Linear reduction of backstepping algorithm based on nonlinear decoration for ship course-keeping control system[J]. Ocean Engineering, 2018, 147: 1-8.
doi: 10.1016/j.oceaneng.2017.10.017 URL |
| [16] | 张显库, 杨光平, 张强. 一种双极性S函数修饰的非线性船舶航向保持算法[J]. 大连海事大学学报, 2016, 42(3): 15-19. |
| ZHANG Xianku, YANG Guangping, ZHANG Qiang. A kind of bipolar sigmoid function decorated nonlinear ship course keeping algorithm[J]. Journal of Dalian Maritime University, 2016, 42(3): 15-19. |
| [1] | WANG Jian, ZHAO Hongyu, ZHONG Jihong, WANG Mengyu, CAI Zhijun. Robust Controller Design for Near Space Vehicle [J]. Air & Space Defense, 2019, 2(3): 53-58. |
| [2] | CHEN Tao-1, YANG Xuan-2, DAI Zi-Bin-1, LI Wei-1, CHEN Xun-1. Design of a Reconfigurable Parallel Nonlinear Feedback Shift Register Structure Targeted at Stream Cipher [J]. Journal of Shanghai Jiaotong University, 2013, 47(01): 28-32. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||