Journal of Shanghai Jiao Tong University ›› 2023, Vol. 57 ›› Issue (10): 1261-1272.doi: 10.16183/j.cnki.jsjtu.2022.501
Special Issue: 《上海交通大学学报》2023年“交通运输工程”专题
• Transportation Engineering • Previous Articles Next Articles
FAN Houming, MA Xiaobin, PENG Wenhao, YUE Lijun( ), MA Mengzhi
), MA Mengzhi
Received:2022-12-07
Revised:2023-01-24
Accepted:2023-02-21
Online:2023-10-28
Published:2023-10-31
Contact:
YUE Lijun
E-mail:yuelj11@163.com
CLC Number:
FAN Houming, MA Xiaobin, PENG Wenhao, YUE Lijun, MA Mengzhi. Container Allocation in Multi-Blocks and Optimization of Yard Crane Dispatching in Non-Engagement of Container Delivery Truck[J]. Journal of Shanghai Jiao Tong University, 2023, 57(10): 1261-1272.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2022.501

Fig.1
Optimization diagram of non-engagement block location
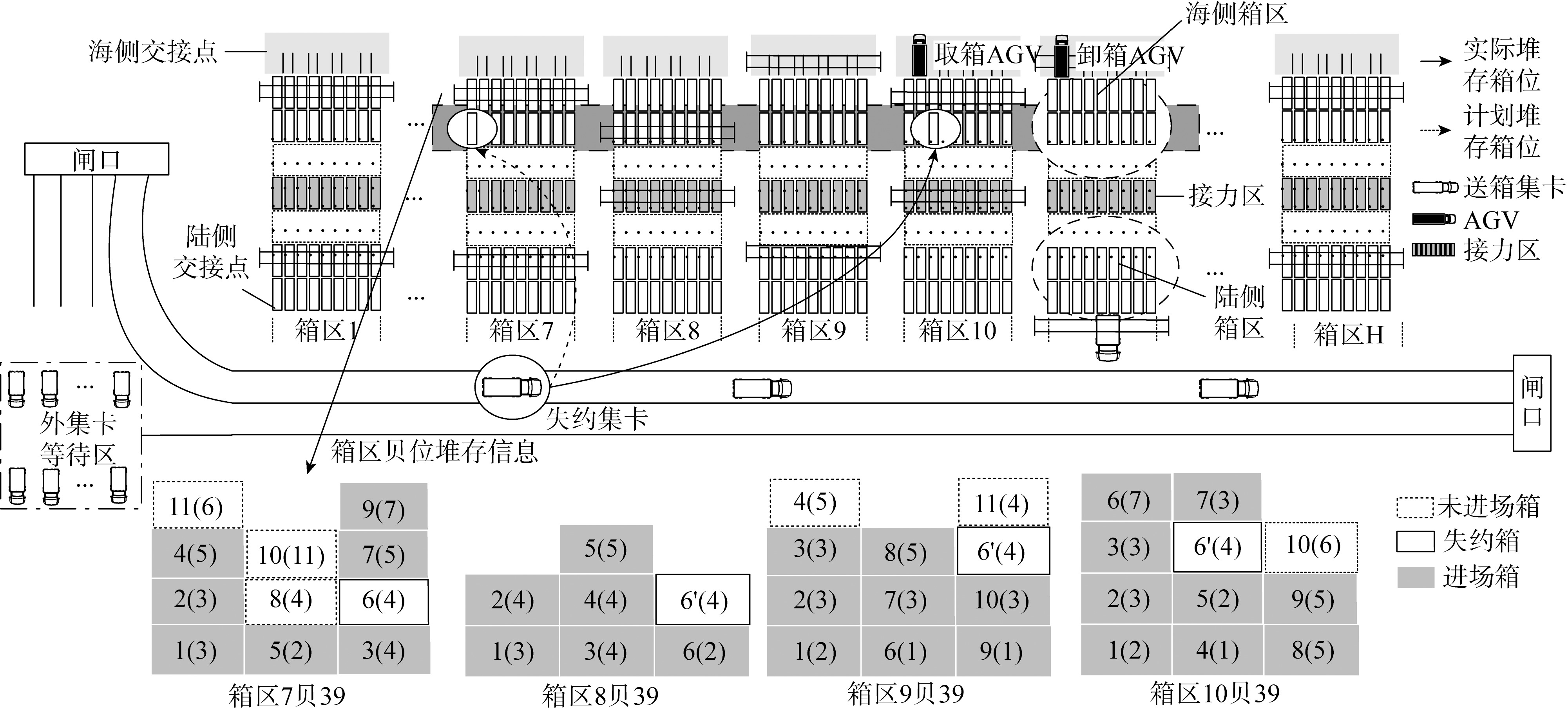

Fig.2
Relationship between double ASCs operation task and export container flow


Fig.3
Hybrid genetic variable neighborhood search algorithm


Fig.4
Chromosome structure


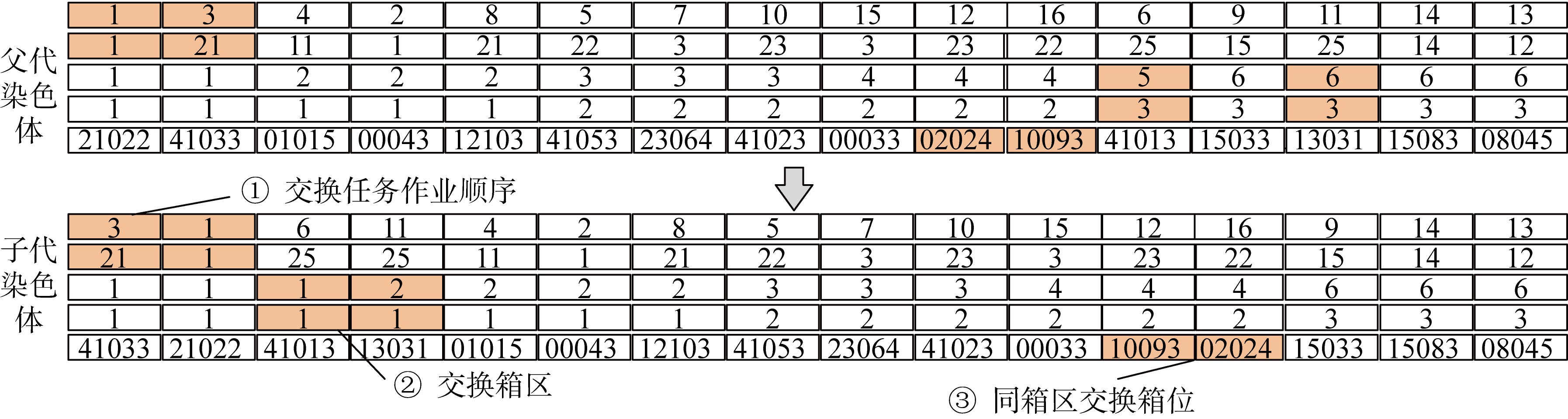
Fig.5
Crossover


Fig.6
Variable neighborhood search
Tab.1
Initial storage of shells in each box area
| 箱区1 | 箱区2 | 箱区3 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 贝位 | 存量 | 贝位 | 存量 | 贝位 | 存量 | 贝位 | 存量 | 贝位 | 存量 | 贝位 | 存量 |
| 1 | 37 | 21 | 30 | 1 | 42 | 21 | 42 | 1 | 42 | 21 | 38 |
| 2 | 32 | 22 | 32 | 2 | 34 | 22 | 22 | 2 | 41 | 22 | 39 |
| 3 | 40 | 23 | 43 | 3 | 41 | 23 | 37 | 3 | 33 | 23 | 40 |
| 4 | 38 | 24 | 41 | 4 | 36 | 24 | 35 | 4 | 33 | 24 | 33 |
| 5 | 40 | 25 | 29 | 5 | 37 | 25 | 32 | 5 | 31 | 25 | 23 |
| 6 | 40 | 26 | 28 | 6 | 40 | 26 | 40 | 6 | 45 | 26 | 36 |
| 7 | 34 | 27 | 37 | 7 | 34 | 27 | 35 | 7 | 34 | 27 | 40 |
| 8 | 35 | 28 | 39 | 8 | 36 | 28 | 36 | 8 | 38 | 28 | 38 |
| 9 | 38 | 29 | 29 | 9 | 33 | 29 | 37 | 9 | 36 | 29 | 39 |
| 10 | 39 | 30 | 35 | 10 | 40 | 30 | 42 | 10 | 37 | 30 | 31 |
| 11 | 45 | 31 | 37 | 11 | 36 | 31 | 43 | 11 | 43 | 31 | 35 |
| 12 | 30 | 32 | 37 | 12 | 36 | 32 | 41 | 12 | 37 | 32 | 36 |
| 13 | 33 | 33 | 37 | 13 | 36 | 33 | 42 | 13 | 40 | 33 | 36 |
| 14 | 42 | 34 | 44 | 14 | 39 | 34 | 28 | 14 | 32 | 34 | 33 |
| 15 | 36 | 35 | 36 | 15 | 43 | 35 | 40 | 15 | 38 | 35 | 45 |
| 16 | 36 | 36 | 29 | 16 | 39 | 36 | 36 | 16 | 42 | 36 | 43 |
| 17 | 36 | 37 | 33 | 17 | 33 | 37 | 37 | 17 | 36 | 37 | 28 |
| 18 | 38 | 38 | 43 | 18 | 42 | 38 | 35 | 18 | 40 | 38 | 32 |
| 19 | 39 | 39 | 45 | 19 | 30 | 39 | 42 | 19 | 37 | 39 | 41 |
| 20 | 0 | 40 | 35 | 20 | 0 | 40 | 32 | 20 | 0 | 40 | 45 |
Tab.2
Comparison of CPLEX solving pre optimization model and HGAVNS algorithm
| 序号 | 箱区规模 | 箱量 | CPLEX | HGAVNS算法 | ||||
|---|---|---|---|---|---|---|---|---|
| f1/min | 计算时间/s | f2/min | 计算时间/s | |||||
| 1 | 1×40×10×5 | 16 | 12.62 | 3.58 | 12.62 | 6.85 | 0 | |
| 2 | 1×40×10×5 | 21 | 17.26 | 9.31 | 17.26 | 10.45 | 0 | |
| 3 | 3×40×10×5 | 16 | 10.65 | 45.16 | 10.65 | 60.03 | 0 | |
| 4 | 3×40×10×5 | 21 | 14.64 | 149.15 | 15.14 | 78.93 | 3.4 | |
| 5 | 3×40×10×5 | 30 | 17.64 | 323.00 | 18.22 | 126.22 | 3.28 | |
| 6 | 3×40×10×5 | 36 | 26.42 | 1 452.31 | 27.36 | 150.42 | 3.55 | |
| 7 | 3×40×10×5 | 42 | 28.64 | 3 485.68 | 29.58 | 164.20 | 3.28 | |
| 8 | 3×40×10×5 | 52 | 35.64 | 8 468.24 | 36.83 | 186.72 | 3.33 | |
| 9 | 3×40×10×5 | 60 | — | >10 000 | 37.09 | 270.25 | — | |
Tab.3
Distribution results of port container of different sizes in multiple container sections
| 序号 | 总箱量 | 先到先 服务策略 f1 /min | 本文策略 | ||
|---|---|---|---|---|---|
| f2 /min | 计算时间/s | ||||
| 1 | 30 | 26.58 | 19.60 | 138.59 | 26.26 |
| 2 | 60 | 43.66 | 37.09 | 270.25 | 17.71 |
| 3 | 90 | 66.14 | 54.33 | 488.99 | 17.86 |
| 4 | 120 | 84.76 | 68.84 | 662.68 | 18.78 |
| 5 | 150 | 107.33 | 88.08 | 961.50 | 17.94 |
| 6 | 180 | 129.00 | 101.31 | 1 396.32 | 21.47 |
| 7 | 210 | 142.40 | 121.03 | 1 834.14 | 15.01 |
| 8 | 240 | 162.08 | 139.64 | 2 402.24 | 13.85 |
| 9 | 270 | 183.48 | 153.76 | 3 132.09 | 16.20 |
| 10 | 300 | 201.77 | 170.46 | 3 587.80 | 15.52 |
Tab.4
Comparison of experimental results of deviation from appointment period
| 偏离程度 | 失约数量 | 完工时间/min | 外集卡等待时间/min | 计算时间/s | |||||
|---|---|---|---|---|---|---|---|---|---|
| 策略1 | 策略2 | 本文策略 | 策略1 | 策略2 | 本文策略 | ||||
| T0n±σn | 5 | 156.59 | 158.88 | 153.85 | 13.67 | 12.99 | 9.04 | 336.21 | |
| 10 | 157.20 | 159.29 | 157.54 | 14.42 | 14.08 | 9.86 | 614.74 | ||
| 20 | 159.40 | 160.24 | 157.71 | 16.09 | 14.81 | 6.53 | 1 152.57 | ||
| 30 | 159.82 | 158.78 | 160.97 | 15.37 | 15.41 | 5.24 | 1 727.04 | ||
| 40 | 160.39 | 162.89 | 162.45 | 15.62 | 16.82 | 3.66 | 1 853.59 | ||
| T0n±2σn | 5 | 161.14 | 159.22 | 151.80 | 15.29 | 12.85 | 8.22 | 334.60 | |
| 10 | 164.79 | 162.96 | 156.78 | 15.23 | 12.58 | 9.38 | 635.42 | ||
| 20 | 165.62 | 163.29 | 159.91 | 18.40 | 13.87 | 8.06 | 1 140.15 | ||
| 30 | 171.53 | 167.22 | 163.83 | 20.60 | 18.30 | 5.67 | 1 692.83 | ||
| 40 | 173.85 | 170.80 | 163.82 | 20.60 | 18.33 | 3.47 | 2 243.80 | ||
| T0n±3σn | 5 | 177.21 | 167.87 | 159.38 | 18.96 | 14.21 | 11.20 | 330.19 | |
| 10 | 179.28 | 172.64 | 160.48 | 24.62 | 18.08 | 9.78 | 704.33 | ||
| 20 | 181.22 | 173.25 | 163.59 | 25.46 | 20.43 | 8.39 | 1 293.72 | ||
| 30 | 182.15 | 176.47 | 164.86 | 26.36 | 23.15 | 6.41 | 1 721.61 | ||
| 40 | 187.13 | 178.63 | 163.63 | 28.49 | 25.16 | 3.58 | 2 436.29 | ||
| T0n±4σn | 5 | 186.08 | 175.85 | 150.93 | 22.54 | 16.57 | 8.92 | 348.53 | |
| 10 | 191.05 | 178.33 | 166.04 | 22.64 | 16.04 | 11.05 | 706.58 | ||
| 20 | 185.06 | 173.14 | 164.33 | 26.49 | 20.87 | 8.93 | 1 236.50 | ||
| 30 | 192.48 | 179.29 | 162.61 | 32.44 | 25.81 | 5.65 | 1 783.83 | ||
| 40 | 193.81 | 182.98 | 158.98 | 34.00 | 30.34 | 3.74 | 2 386.66 | ||
| T0n±5σn | 5 | 218.94 | 205.25 | 163.78 | 27.15 | 17.22 | 9.87 | 290.43 | |
| 10 | 220.90 | 212.09 | 167.85 | 30.12 | 20.45 | 7.30 | 710.48 | ||
| 20 | 240.24 | 222.44 | 160.29 | 36.14 | 25.06 | 5.54 | 1 185.01 | ||
| 30 | 248.41 | 230.48 | 170.39 | 39.14 | 30.21 | 4.93 | 1 895.23 | ||
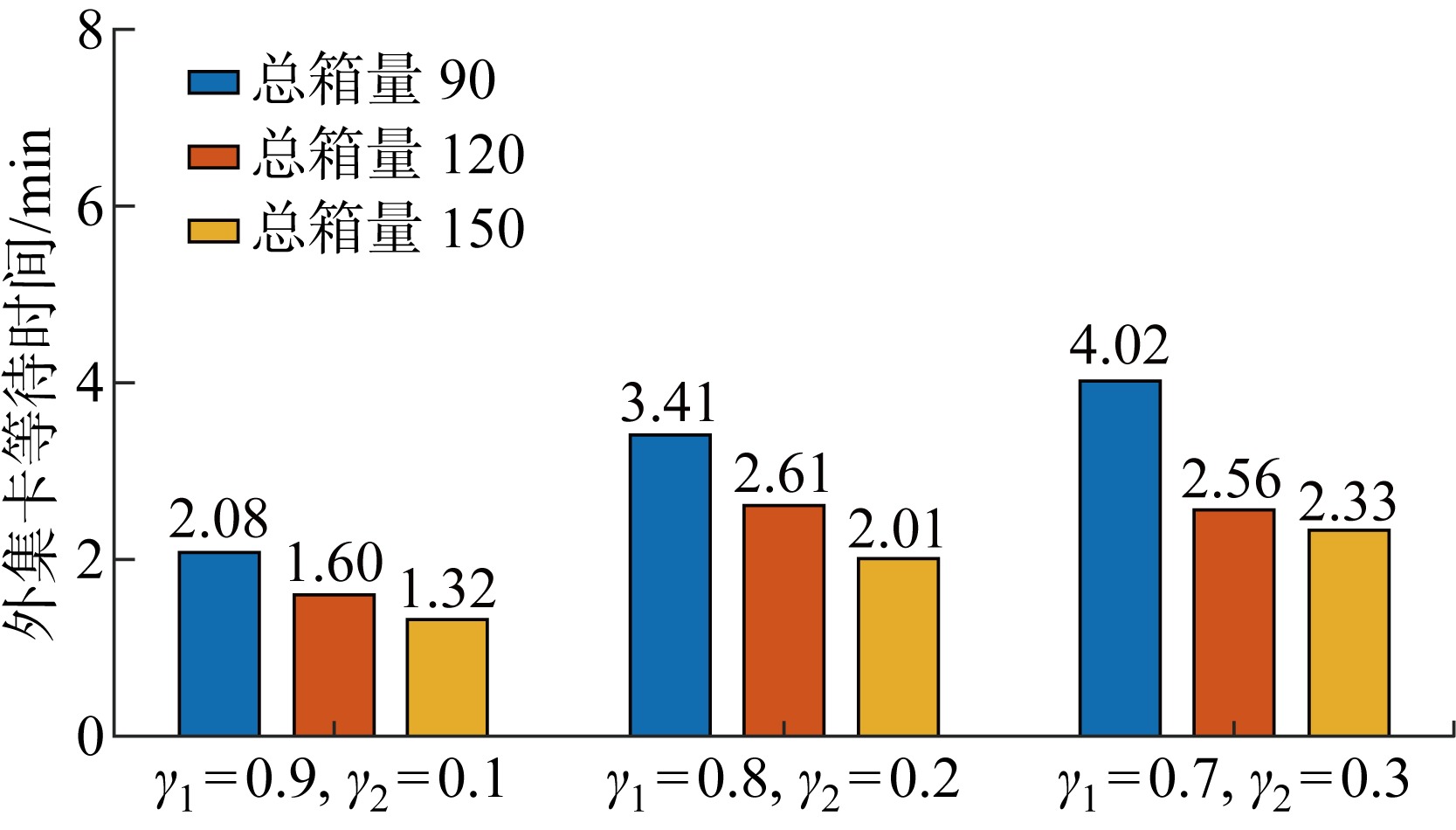
| 40 | 259.18 | 227.71 | 172.75 | 43.09 | 36.33 | 4.02 | 2 277.01 | ||
Fig.7
Comparison of f1 with 150 containers
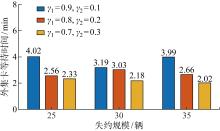
Fig.8
Comparison of f2 with 150 containers
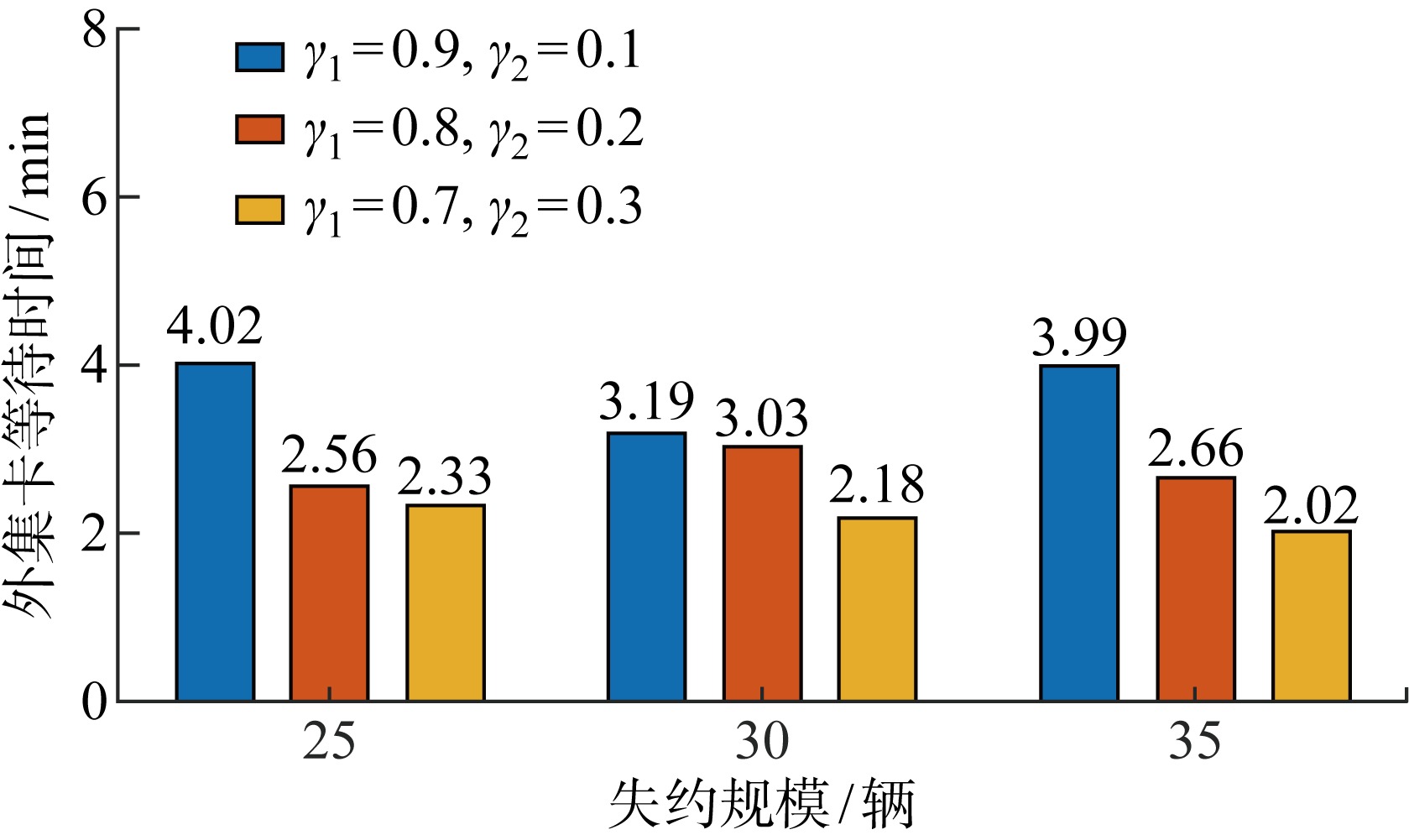
Fig.9
Comparison of f1 under the same weight
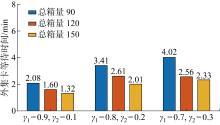
Fig.10
Comparison of f2 under the same weight
| [1] | 马梦知, 范厚明, 计明军, 等. 集装箱码头送箱集卡预约与场桥调度协同优化[J]. 交通运输系统工程与信息, 2018, 18(3): 202-209. |
| MA Mengzhi, FAN Houming, JI Mingjun, et al. Integrated optimization of truck appointment for export containers and crane deployment in a container terminal[J]. Journal of Transportation Systems Engineering and Information Technology, 2018, 18(3): 202-209. | |
| [2] |
GHAREHGOZLI A, ZAERPOUR N. Stacking outbound barge containers in an automated deep-sea terminal[J]. European Journal of Operational Research, 2018, 267(3): 977-995.
doi: 10.1016/j.ejor.2017.12.040 URL |
| [3] | YU H, NING J Z, WANG Y, et al. Flexible yard management in container terminals for uncertain retrieving sequence[J]. Ocean & Coastal Management, 2021, 212: 105794. |
| [4] |
GALLE V, BARNHART C, JAILLET P. Yard Crane Scheduling for container storage, retrieval, and relocation[J]. European Journal of Operational Research, 2018, 271(1): 288-316.
doi: 10.1016/j.ejor.2018.05.007 URL |
| [5] |
TORKJAZI M, HUYNH N, SHIRI S. Truck appointment systems considering impact to drayage truck tours[J]. Transportation Research Part E: Logistics and Transportation Review, 2018, 116: 208-228.
doi: 10.1016/j.tre.2018.06.003 URL |
| [6] | 尹延冬, 靳志宏. 集装箱码头失约集卡出口箱落箱位选择优化[J]. 科学技术与工程, 2021, 21(25): 10956-10966. |
| YIN Yandong, JIN Zhihong. Optimization of slot selection of export containers under truck no-showing situation in a container terminal[J]. Science Technology and Engineering, 2021, 21(25): 10956-10966. | |
| [7] |
SHA M, ZHANG T, LAN Y, et al. Scheduling optimization of yard cranes with minimal energy consumption at container terminals[J]. Computers & Industrial Engineering, 2017, 113: 704-713.
doi: 10.1016/j.cie.2016.03.022 URL |
| [8] |
MALDONADO S, GONZÁLEZ-RAMÍREZ R G, QUIJADA F, et al. Analytics meets port logistics: A decision support system for container stacking operations[J]. Decision Support Systems, 2019, 121: 84-93.
doi: 10.1016/j.dss.2019.04.006 URL |
| [9] |
DE MELO DA SILVA M, ERDOĞAN G, BATTARRA M, et al. The block retrieval problem[J]. European Journal of Operational Research, 2018, 265(3): 931-950.
doi: 10.1016/j.ejor.2017.08.048 URL |
| [10] |
范厚明, 孔靓, 岳丽君. 考虑出口箱进出场及预翻箱的箱位分配与场桥调度协同优化[J]. 运筹与管理, 2021, 30(6): 26-34.
doi: 10.12005/orms.2021.0176 |
|
FAN Houming, KONG Liang, YUE Lijun. Yard crane scheduling and storage space allocation considering container storage, retrieval, and pre-marshalling[J]. Operations Research and Management Science, 2021, 30(6): 26-34.
doi: 10.12005/orms.2021.0176 |
|
| [11] | 陈超, 台伟力, 杨逸蓝, 等. 出口箱随机入港下的箱区选择与箱位分配协调调度[J]. 上海交通大学学报, 2014, 48(4): 544-550. |
| CHEN Chao, TAI Weili, YANG Yilan, et al. Coordinated scheduling problem for block choice and slot arrangement under outbound container random arrival[J]. Journal of Shanghai Jiao Tong University, 2014, 48(4): 544-550. | |
| [12] |
KRESS D, DORNSEIFER J, JAEHN F. An exact solution approach for scheduling cooperative gantry cranes[J]. European Journal of Operational Research, 2019, 273(1): 82-101.
doi: 10.1016/j.ejor.2018.07.043 |
| [1] | YANG Bo, ZENG Chunyuan, CHEN Yijun, SHU Hongchun, CAO Pulin. Extreme Learning Machine and Its Application in Parameter Identification of Proton Exchange Membrane Fuel Cell [J]. Journal of Shanghai Jiao Tong University, 2023, 57(4): 482-494. |
| [2] | MENG Lingtong,JIANG Zuhua,TAO Ningrong,LIU Jianfeng,LI Baihe. Combined Assembly Block Scheduling in Storage Yard of Shipbuilding [J]. Journal of Shanghai Jiaotong University, 2019, 53(7): 780-788. |
| [3] | LI Tantan,LEI Ming. Heuristic Algorithm-Based Initiation Method of Probability Hypothesis Density Filter for Target Tracking [J]. Journal of Shanghai Jiao Tong University, 2018, 52(1): 63-69. |
| [4] | FAN Houming,MA Mengzhi,Yao Xi,GUO Zhenfeng. Integrated Optimization of Storage Space Allocation and Multiple Yard Cranes Scheduling in a Container Terminal Yard [J]. Journal of Shanghai Jiao Tong University, 2017, 51(11): 1367-1373. |
| [5] | ZHANG Bowen1,LU Zhiqiang1,ZHANG Yuejun2. An Integrated Model of Production Planning and Preventive Maintenance for Parallel Systems [J]. Journal of Shanghai Jiaotong University, 2015, 49(04): 564-571. |
| [6] | BIAN Zhan1,XU Qi1,JIN Zhihong1,LI Xiangjun2. Optimization of Yard Crane Scheduling with Consideration of Export Container Relocation [J]. Journal of Shanghai Jiaotong University, 2014, 48(1): 146-153. |
| [7] | LI Xiang,CAO Yuanguo,ZHANG Zhinan,XIE Youbai. An Automated Planning-Based Conceptual Design Synthesis Approach [J]. Journal of Shanghai Jiaotong University, 2014, 48(08): 1134-1141. |
| [8] | HE Jun-liang1,2* (何军良), ZHANG Wei-min1 (张为民), HUANG You-fang2 (黄有方), YAN Wei2 (严 伟). An Efficient Approach for Solving Yard Crane Scheduling in a Container Terminal [J]. Journal of shanghai Jiaotong University (Science), 2013, 18(5): 606-619. |
| [9] | BI Ya-1, LI Wen-Feng-2. Research on the Location-Allocation System with Constraints Based on Covering Location Problem [J]. Journal of Shanghai Jiaotong University, 2013, 47(03): 495-499. |
| [10] | ZHU Wei-a, XU Ke-Lin-a, ZHOU Bing-Hai-a, XU Jin-Chao-b. Study on Multistage Multiobjective Network Location Problem Based on Greedy Heuristic Algorithm [J]. Journal of Shanghai Jiaotong University, 2012, 46(02): 269-275. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||