Journal of Shanghai Jiao Tong University ›› 2024, Vol. 58 ›› Issue (11): 1762-1771.doi: 10.16183/j.cnki.jsjtu.2024.208
• Guidance, Navigation and Control • Previous Articles Next Articles
HAN Yifan1,2, CHEN Boyi1,2( ), LIU Yanbin1,2, CHEN Jinbao1,2
), LIU Yanbin1,2, CHEN Jinbao1,2
Received:2024-06-06
Revised:2024-07-03
Accepted:2024-07-08
Online:2024-11-28
Published:2024-12-02
Fig.1
Structure of variable-configuration aircraft
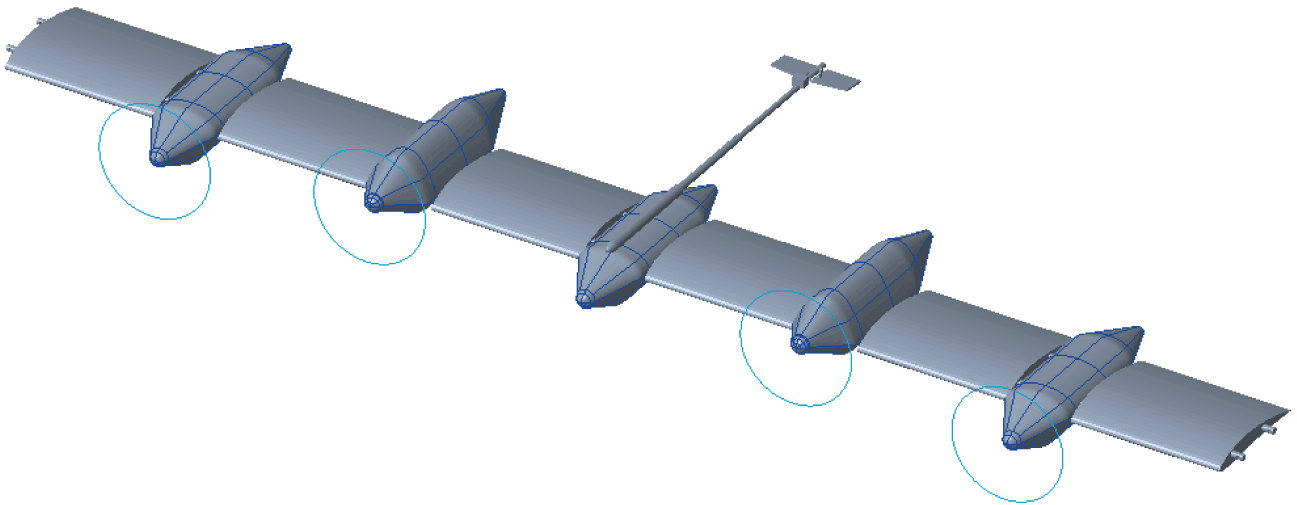
Fig.2
Diagram of multi-body folding wing
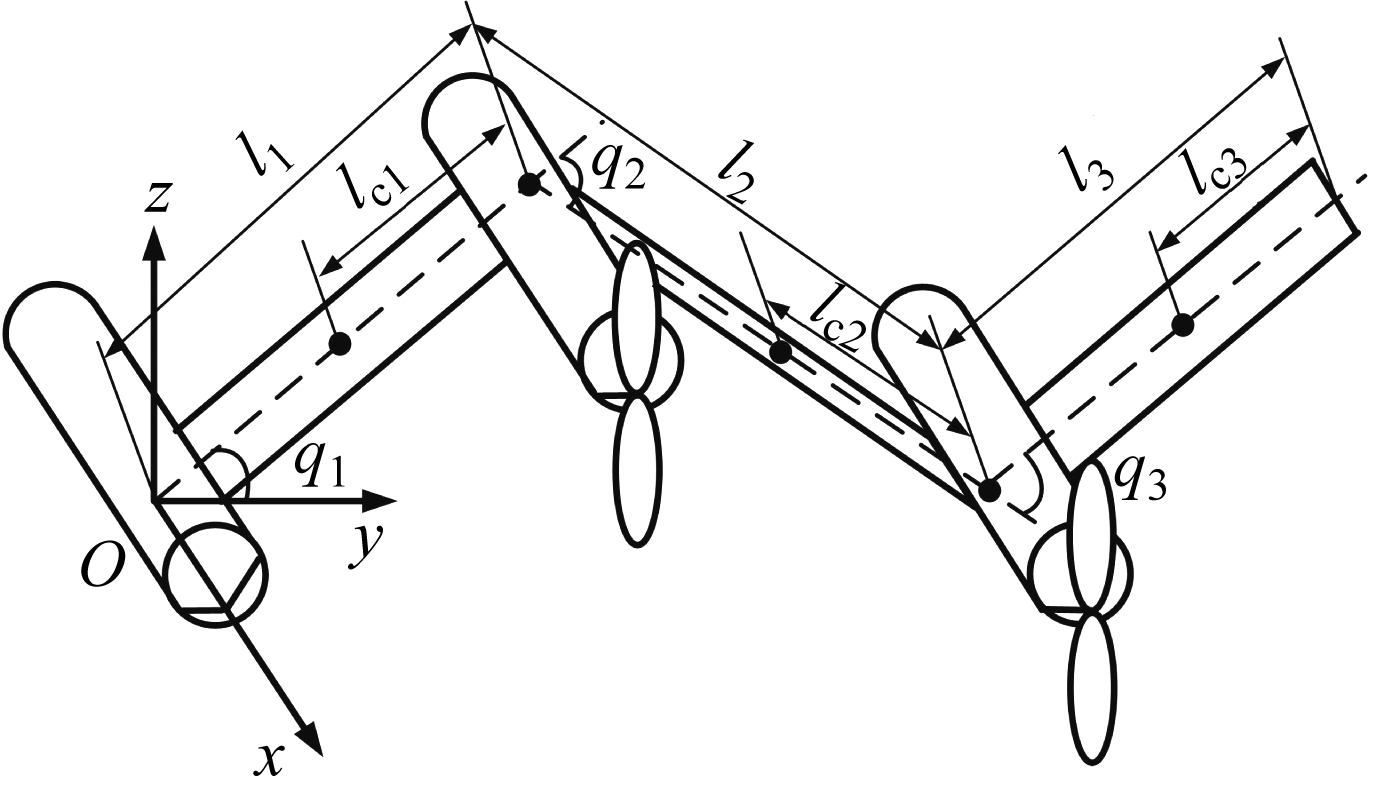
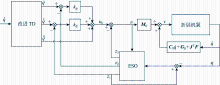
Fig.3
Controller structure diagram
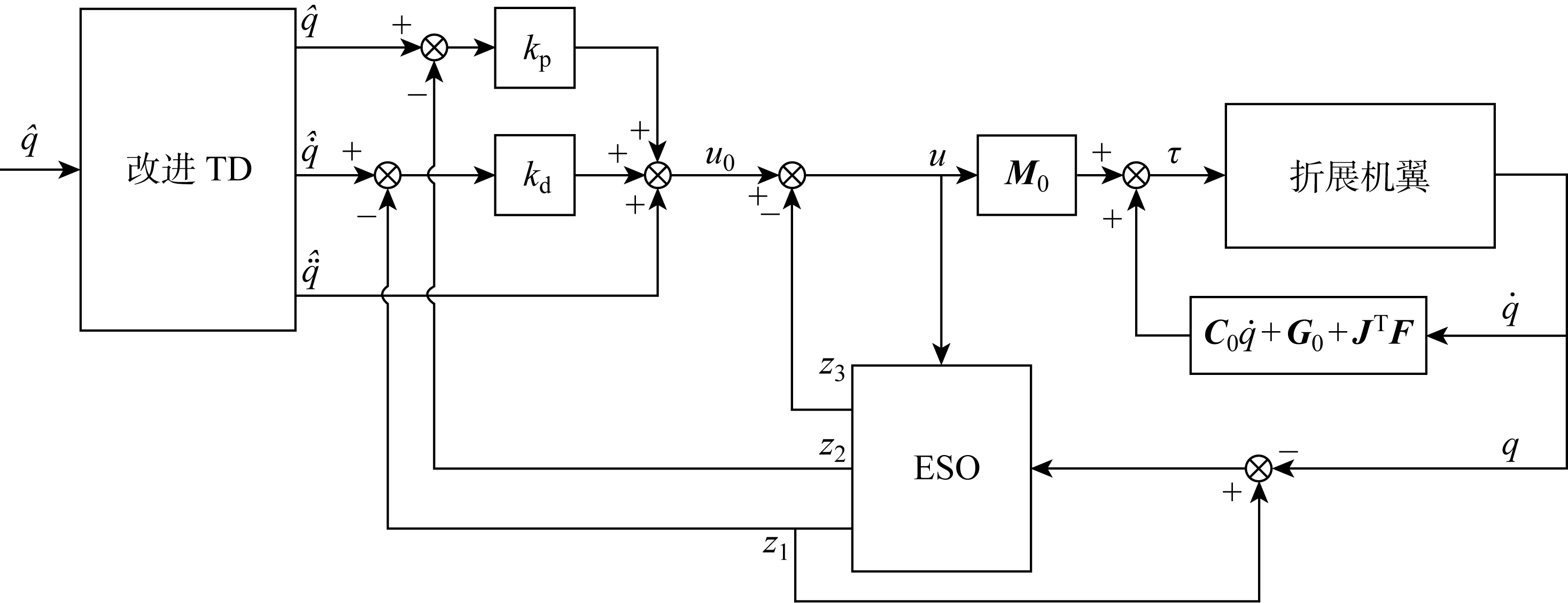
Fig.4
Trajectory tracking curves under fixed load and variable load conditions
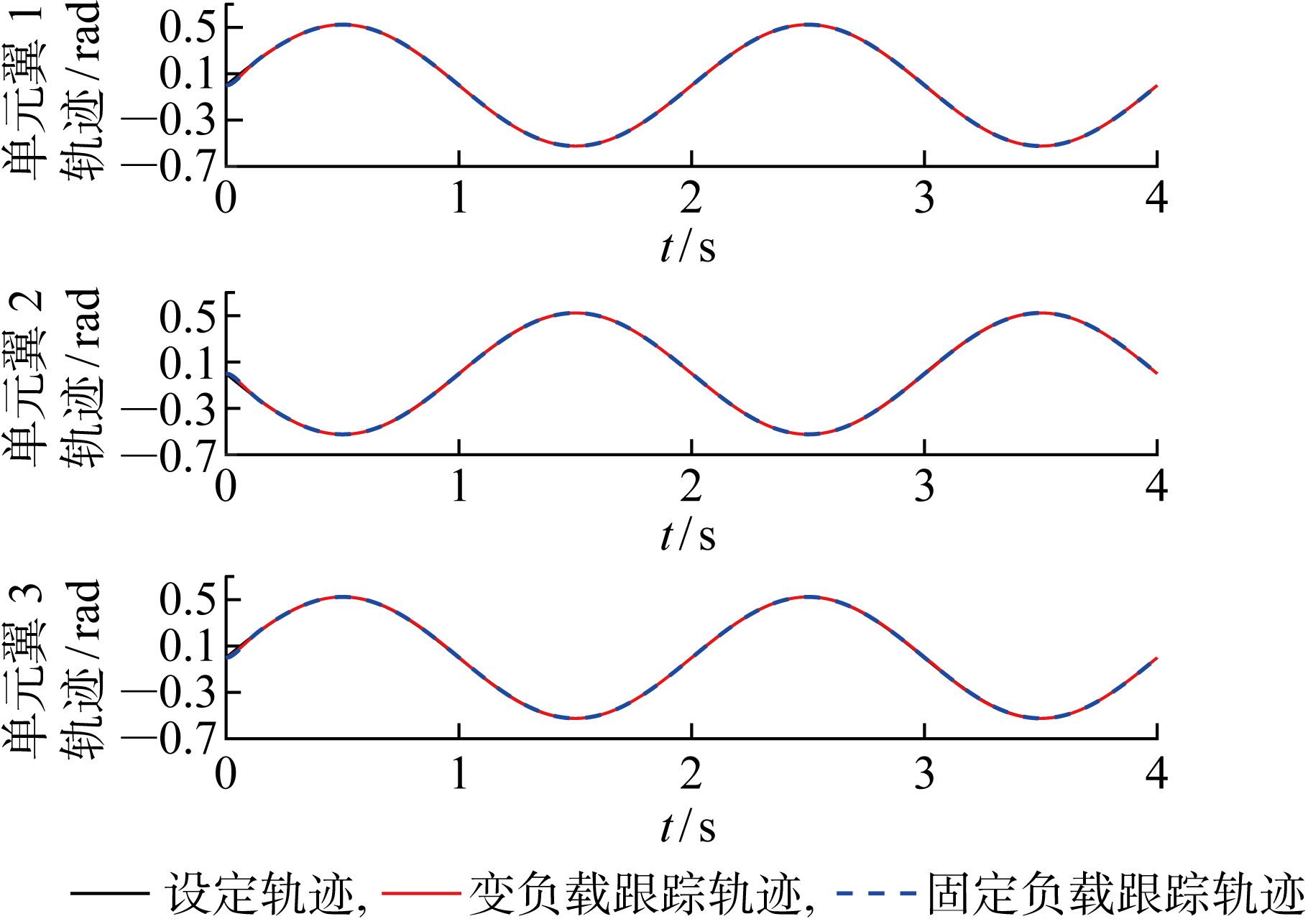
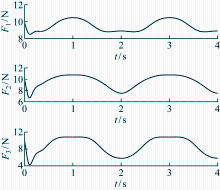
Fig.5
Aerodynamic load curves of folding wing
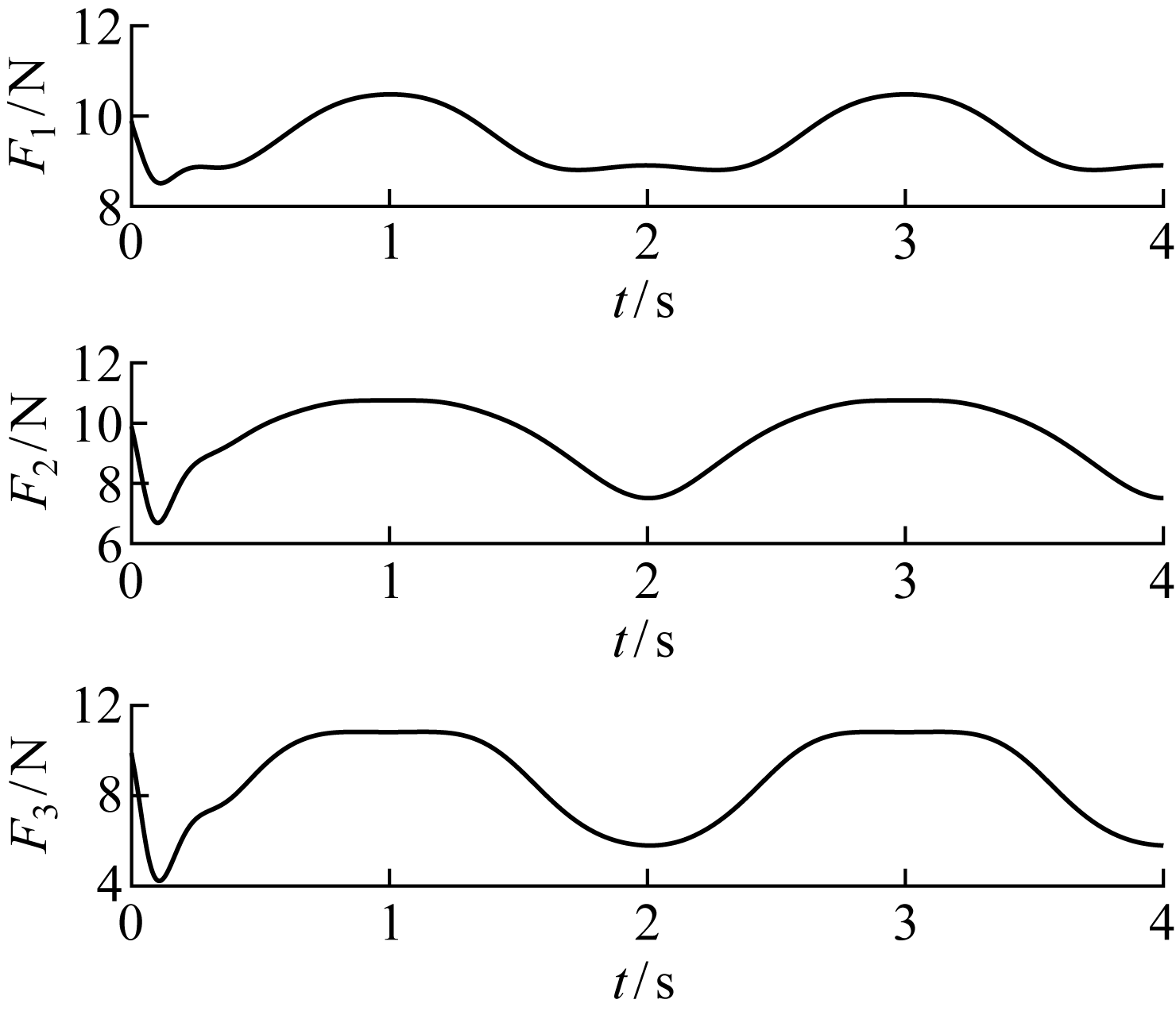
Fig.6
Error curves of position tracking under variable load and fixed load conditions
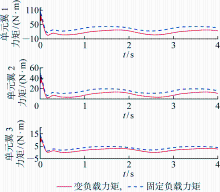
Fig.7
Torque curves under variable load and fixed load conditions
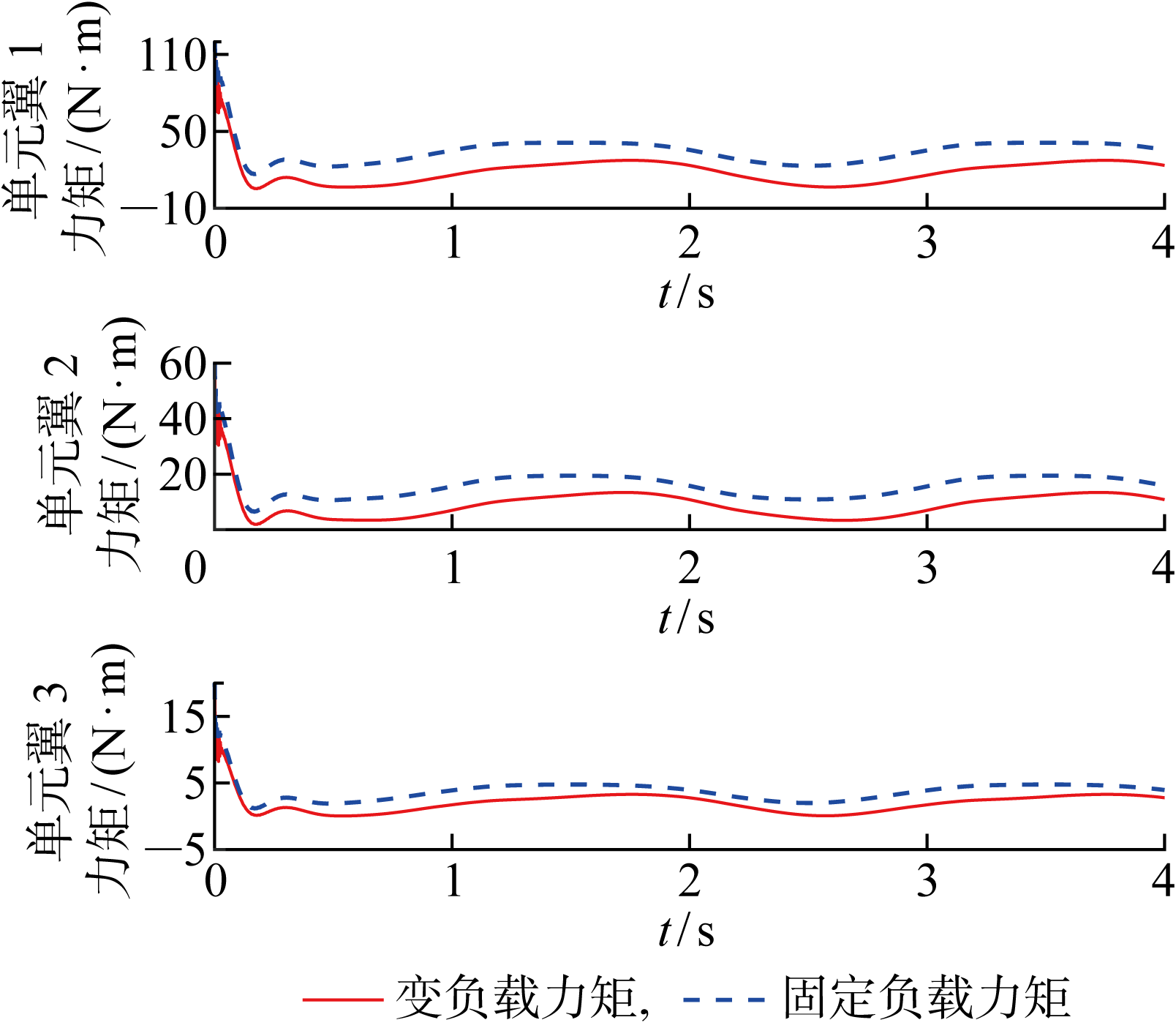
Fig.8
Aerodynamic load with disturbance
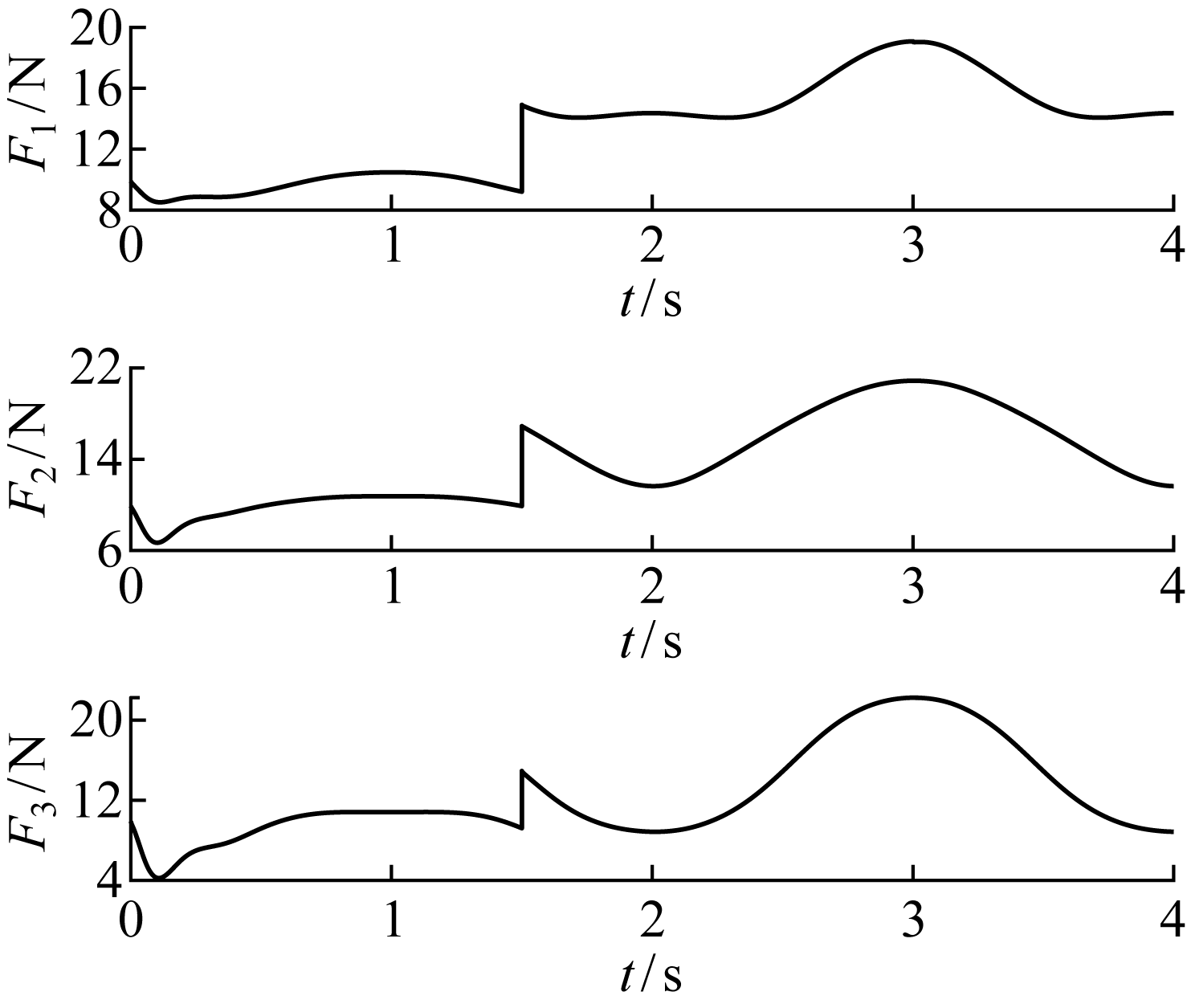
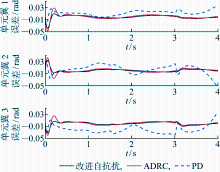
Fig.9
Error curves of position tracking under disturbed condition
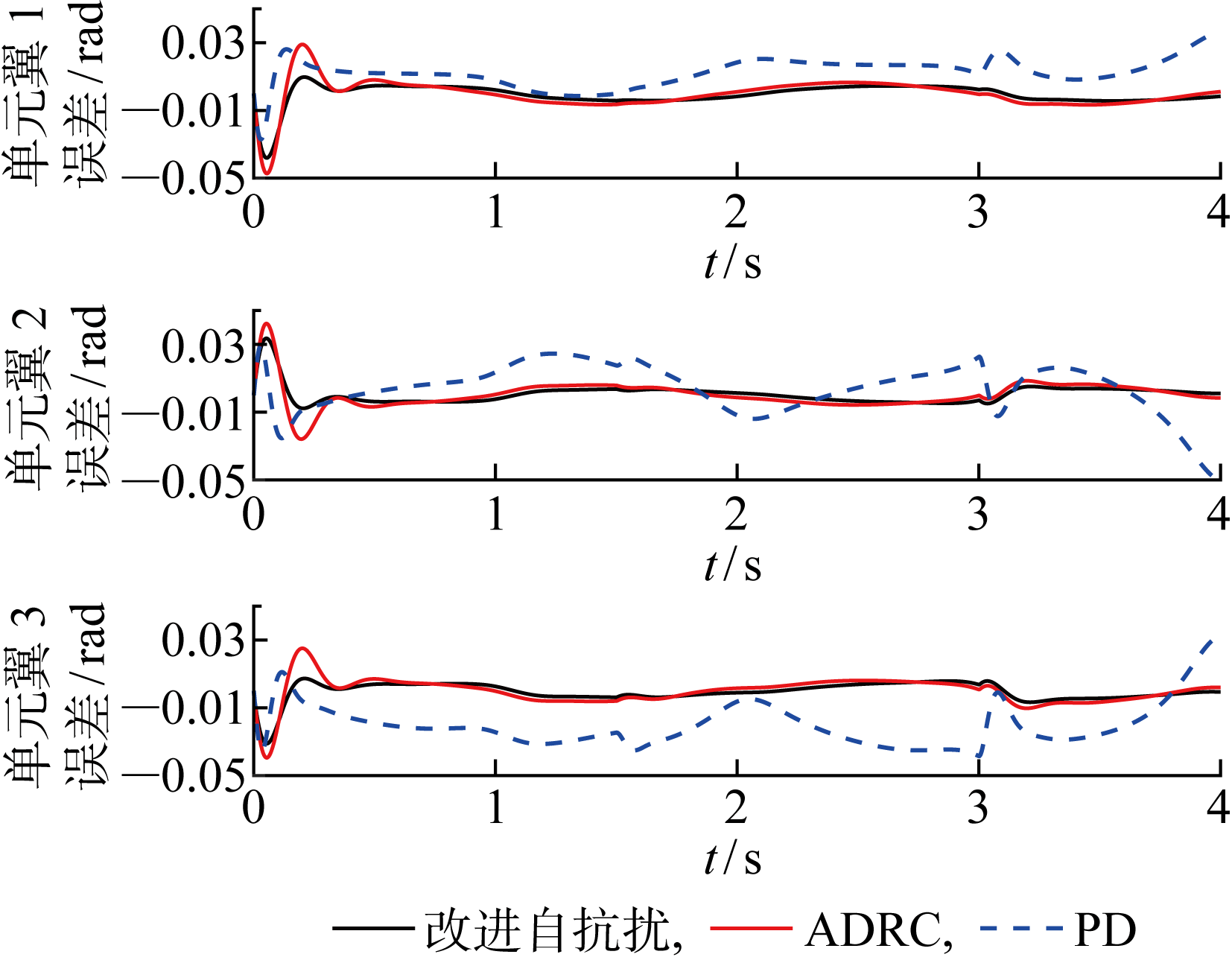
Fig.10
Torque curves under disturbed condition

| [1] |
冷劲松, 孙健, 刘彦菊. 智能材料和结构在变体飞行器上的应用现状与前景展望[J]. 航空学报, 2014, 35(1): 29-45.
doi: 10.7527/S1000-6893.2013.0265 |
|
LENG Jinsong, SUN Jian, LIU Yanju. Application status and future prospect of smart materials and structures in morphing aircraft[J]. Acta Aeronautica et Astronautica Sinica, 2014, 35(1): 29-45.
doi: 10.7527/S1000-6893.2013.0265 |
|
| [2] | BOWMAN J, SANDERS B, CANNON B, et al. Development of next generation morphing aircraft structures[C]//48th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference. Waikiki, Hawaii, USA: 2007: 1730. |
| [3] | ÖZEL C, ÖZBEK E, EKICI S. A review on applications and effects of morphing wing technology on UAVs[J]. International Journal of Aviation Science and Technology, 2020, 1(1): 30-40. |
| [4] | KUDVA J N. Overview of the DARPA smart wing project[J]. Journal of Intelligent Material Systems and Structures, 2004, 15(4): 261-267. |
| [5] | WLEZIEN R W, HORNER G C, MCGOWAN A M R, et al. Aircraft morphing program[C]//Smart Structures and Materials 1998:Industrial and Commercial Applications of Smart Structures Technologies. San Diego, California, USA: SPIE, 1998, 3326: 176-187. |
| [6] | XIAO K, CHEN Y, JIANG W, et al. Modeling, simulation and implementation of a bird-inspired morphing wing aircraft[C]//2019 3rd International Conference on Robotics and Automation Sciences. Wuhan, China: IEEE, 2019: 238-243. |
| [7] | RYU S W, LEE J G, KIM H J. Design, fabrication, and analysis of flapping and folding wing mechanism for a robotic bird[J]. Journal of Bionic Engineering, 2020, 17: 229-240. |
| [8] | WANG I. Aeroelastic and flight dynamics analysis of folding wing systems[D]. Durham, USA: Duke University, 2013. |
| [9] | 赵亚鲁. 折叠机翼的刚柔气动耦合动力学研究[D]. 天津: 天津理工大学, 2021. |
| ZHAO Yalu. The rigid-flexible aerodynamic coupling dynamics of folding wing[D]. Tianjin: Tianjin University of Technology, 2021. | |
| [10] | 郭秋亭, 张来平, 常兴华, 等. 变形飞机动态气动特性数值模拟研究[J]. 空气动力学学报, 2011, 29(6): 744-750. |
| GUO Qiuting, ZHANG Laiping, CHANG Xinghua, et al. Numerical simulation of dynamic aerodynamic characteristics of a morphing aircraft[J]. Acta Aerodynamica Sinica, 2011, 29(6): 744-750. | |
| [11] | HU W, YANG Z, GU Y. Aeroelastic study for folding wing during the morphing process[J]. Journal of Sound and Vibration, 2016, 365: 216-229. |
| [12] | MENG Q, LAI X, YAN Z, et al. Motion planning and adaptive neural tracking control of an uncertain two-link rigid-flexible manipulator with vibration amplitude constraint[J]. IEEE Transactions on Neural Networks and Learning Systems, 2021, 33(8): 3814-3828. |
| [13] | KIANG C T, SPOWAGE A, YOONG C K. Review of control and sensor system of flexible manipulator[J]. Journal of Intelligent & Robotic Systems, 2015, 77: 187-213. |
| [14] | MORALES R, FELIU V, JARAMILLO V. Position control of very lightweight single-link flexible arms with large payload variations by using disturbance observers[J]. Robotics and Autonomous Systems, 2012, 60(4): 532-547. |
| [15] | LEE J, CHANG P H, YU B, et al. An adaptive PID control for robot manipulators under substantial payload variations[J]. IEEE Access, 2020, 8: 162261-162270. |
| [16] | 刘志豪, 闵荣, 方成. 多飞行模式垂直起降无人机过渡飞行控制策略[J]. 上海交通大学学报, 2019, 53(10): 1173-1181. |
| LIU Zhihao, MIN Rong, FANG Cheng. Transition flight control strategy of multiple flight mode vertical take-off and landing unmanned aerial vehicle[J]. Journal of Shanghai Jiao Tong University, 2019, 53(10): 1173-1181. | |
| [17] | 陶晓荣, 陆宇平, 殷明. 展向变形飞行器机翼扭转时的鲁棒飞行控制与分析[J]. 电子设计工程, 2014, 22(10): 159-162. |
| TAO Xiaorong, LU Yuping, YIN Ming. Robust flight control and analysis of aircraft with spanwise morphing[J]. Electronic Design Engineering, 2014, 22(10): 159-162. | |
| [18] |
宋慧心, 金磊. 折叠翼飞行器的动力学建模与稳定控制[J]. 力学学报, 2020, 52(6): 1548-1559.
doi: 10.6052/0459-1879-20-115 |
|
SONG Huixin, JIN Lei. Dynamic modeling and stability control of folding wing aircraft[J]. Chinese Journal of Theoretical and Applied Mechanics, 2020, 52(6): 1548-1559.
doi: 10.6052/0459-1879-20-115 |
|
| [19] | 周林阳, 王生捷. 基于反正切非线性函数的自抗扰控制[J]. 上海交通大学学报, 2013, 47(7): 1043-1048. |
| ZHOU Linyang, WANG Shengjie. An improved ADRC based on nonlinear arctangent function[J]. Journal of Shanghai Jiao Tong University, 2013, 47(7): 1043-1048. | |
| [20] | 张镇. 欠驱动三连杆机器人控制策略研究[D]. 长沙: 中南大学, 2011. |
| ZHANG Zhen. Research on control strategy of three-link underactuated robot[D]. Changsha: Central South University, 2011. | |
| [21] | 马鲁邯. 多关节折叠机械臂动力学建模及运动特性研究[D]. 北京: 中国矿业大学(北京), 2022. |
| MA Luhan. Dynamic modeling and motion characteristic research of the multi-joint foldable manipulator[D]. Beijing: China University of Mining and Technology-Beijing, 2022. | |
| [22] | 刘延芳, 刘宏, 孟瑶. 负载不确定的柔性机械臂自适应自抗扰控制[J]. 哈尔滨工业大学学报, 2017, 49(7): 12-19. |
| LIU Yanfang, LIU Hong, MENG Yao. Adaptive active disturbance rejection control of flexible manipulators with uncertain payload[J]. Journal of Harbin Institute of Technology, 2017, 49(7): 12-19. | |
| [23] | 陈志环, 戴雪刚, 董加顺. 双连杆柔性关节机械臂分数阶线性自抗扰控制[J]. 组合机床与自动化加工技术, 2023(7): 147-151. |
| CHEN Zhihuan, DAI Xuegang, DONG Jiashun. Fractional-order liner active disturbance rejection control of dual linkage flexible joint manipulator[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2023(7): 147-151. | |
| [24] | 葛倩, 傅海伦, 胡明涛. 一种基于有限时间收敛微分器的NDO设计[J]. 火力与指挥控制, 2020, 45(11): 178-182. |
| GE Qian, FU Hailun, HU Mingtao. A nonlinear disturbance observer design based on finite-time convergent differentiator[J]. Fire Control & Command Control, 2020, 45(11): 178-182. | |
| [25] | 周浩, 暴小鹏, 张洪刚. UAV自抗扰控制的调相补偿改进设计与抑扰实现[J/OL]. 兵工学报. http://kns.cnki.net/kcms/detail/11.2176.TJ.20240219.1333.004.html. |
| ZHOU Hao, BAO Xiaopeng, ZHANG Honggang. Improved design of phase modulation compensation and analysis of disturbance suppression for UAV active disturbance rejection control[J/OL]. Acta Armamentarii. http://kns.cnki.net/kcms/detail/11.2176.TJ.20240219.1333.004.html. |
| [1] | ZHENG Tianhai, FENG Zhengping, ZHAO Shuo, PAN Wanjun. Active Disturbance Rejection Controller Based Heading Control of Underwater Flight Vehicles [J]. Journal of Shanghai Jiao Tong University(Science), 2020, 25(4): 441-446. |
| [2] | ZHU Mixin, GE Yaxiong, ZHOU Xiaojun. Preventive Maintenance Strategy for Multi-Stage Flexible Manufacturing System with Dynamic Production Planning [J]. Journal of Shanghai Jiaotong University, 2020, 54(11): 1124-1133. |
| [3] | WAN Lei1,ZHANG Yinghao1,SUN Yushan1,LI Yueming1,HE Bin1. ADRC Path-Following Control of Underactuated AUVs [J]. Journal of Shanghai Jiaotong University, 2014, 48(12): 1727-1731. |
| [4] |
LIU Xuefeng,LIU Jinping,CHEN Xinglong,LUO Wenhai.
Static Stability Analysis of Air-Conditioning Chilled Water System for Variable Differential Pressure Control Considering Bypass Loop Regulation Characteristics
|
| [5] | HUA Hai-de1* (华海德), MA Ning1 (马 宁), MA Jie1 (马 捷), ZHU Xing-yu2 (朱星宇). Robust Intelligent Control Design for Marine Diesel Engine [J]. Journal of shanghai Jiaotong University (Science), 2013, 18(6): 660-666. |
| Viewed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
Full text 119
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
Abstract 116
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||