Journal of Shanghai Jiao Tong University ›› 2024, Vol. 58 ›› Issue (11): 1644-1653.doi: 10.16183/j.cnki.jsjtu.2023.121
• Naval Architecture, Ocean and Civil Engineering • Previous Articles Next Articles
HE Yu1, OUYANG Zilu1, ZOU Lu1,2( ), CHEN Weimin3, ZOU Zaojian1,2
), CHEN Weimin3, ZOU Zaojian1,2
Received:2023-04-03
Revised:2023-05-29
Accepted:2023-07-03
Online:2024-11-28
Published:2024-12-02
CLC Number:
HE Yu, OUYANG Zilu, ZOU Lu, CHEN Weimin, ZOU Zaojian. Ship Path Following and Collision Avoidance Based on Vector Field Guidance Law and Model Predictive Control[J]. Journal of Shanghai Jiao Tong University, 2024, 58(11): 1644-1653.
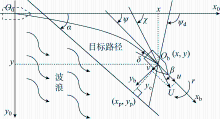
Fig.1
Ship planar position and motion parameters
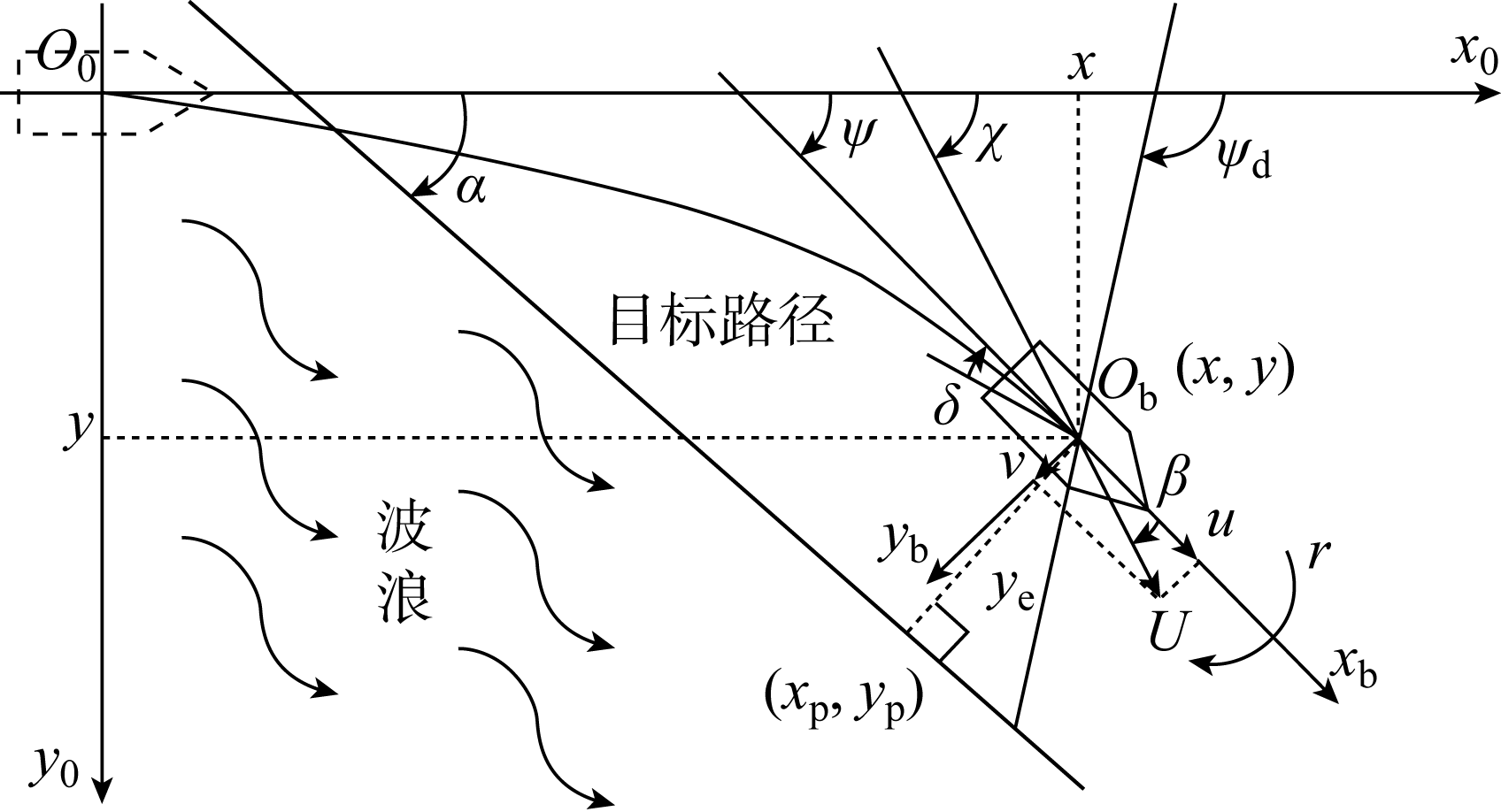
Fig.2
Vector field around target path (red line)
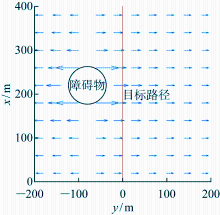
Fig.3
Vector field generated by the obstacle
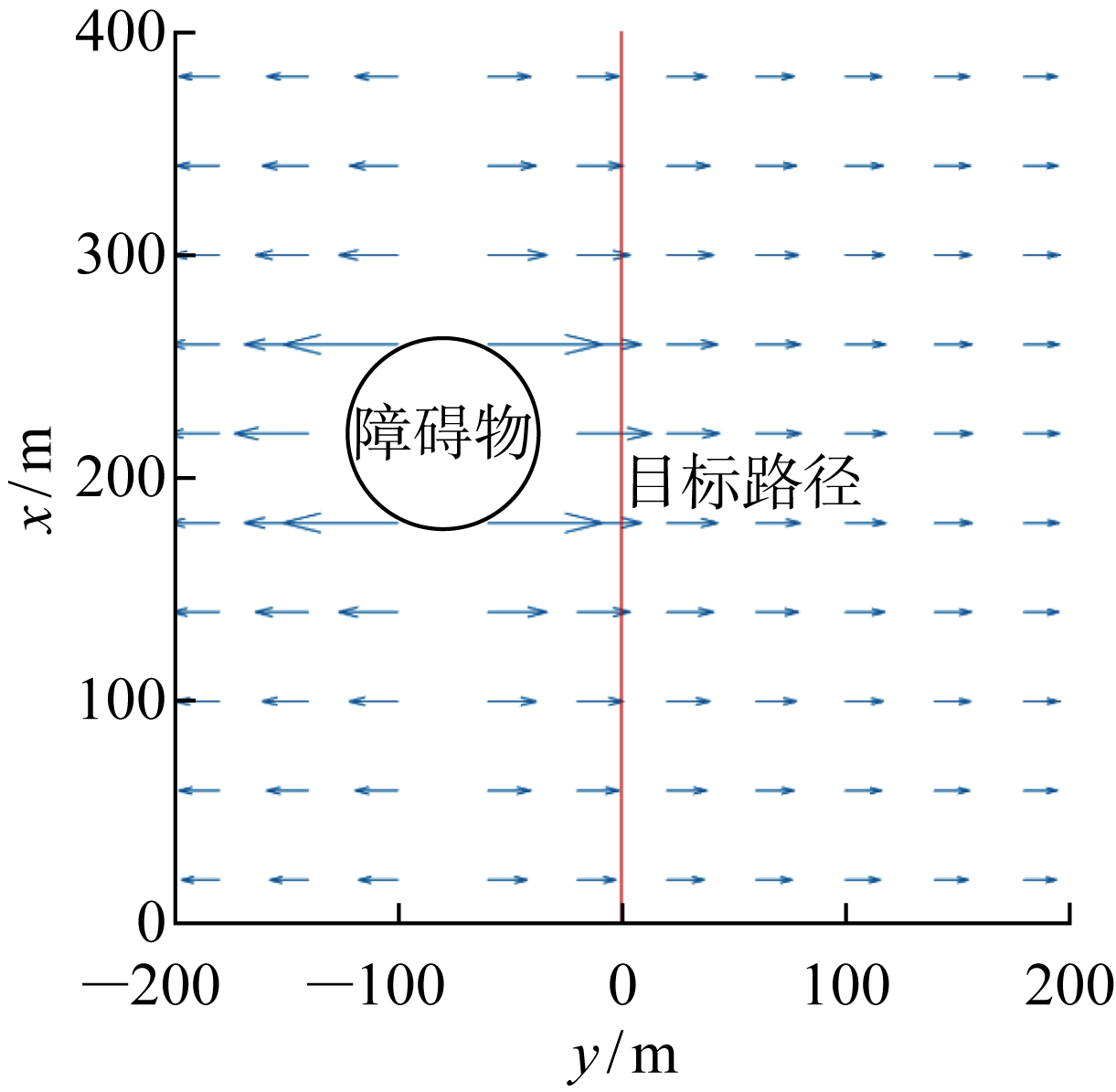
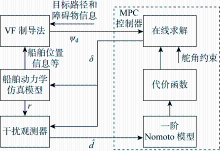
Fig.4
Structure of controller
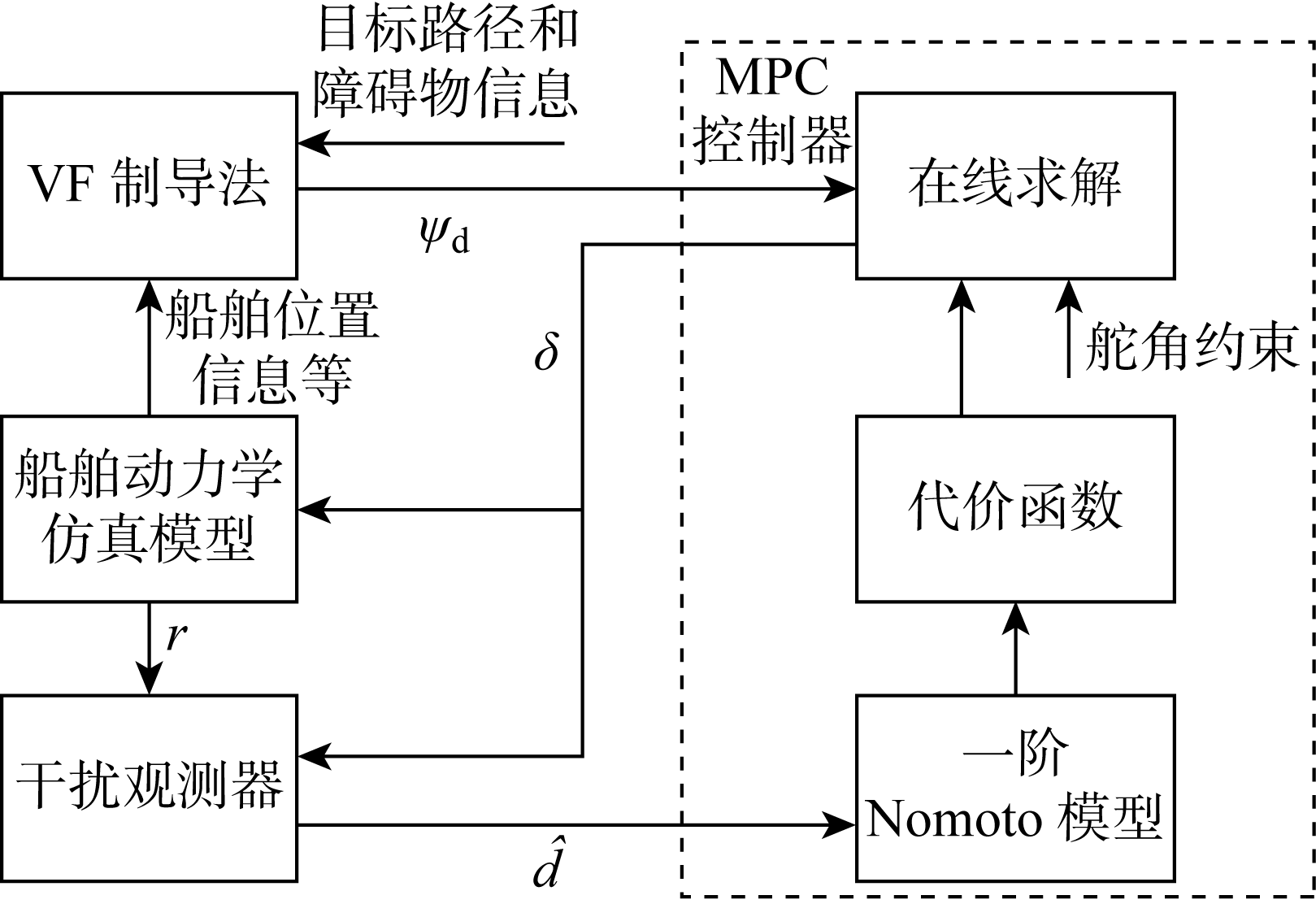
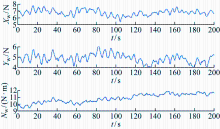
Fig.5
Wave force (moment) on the ship
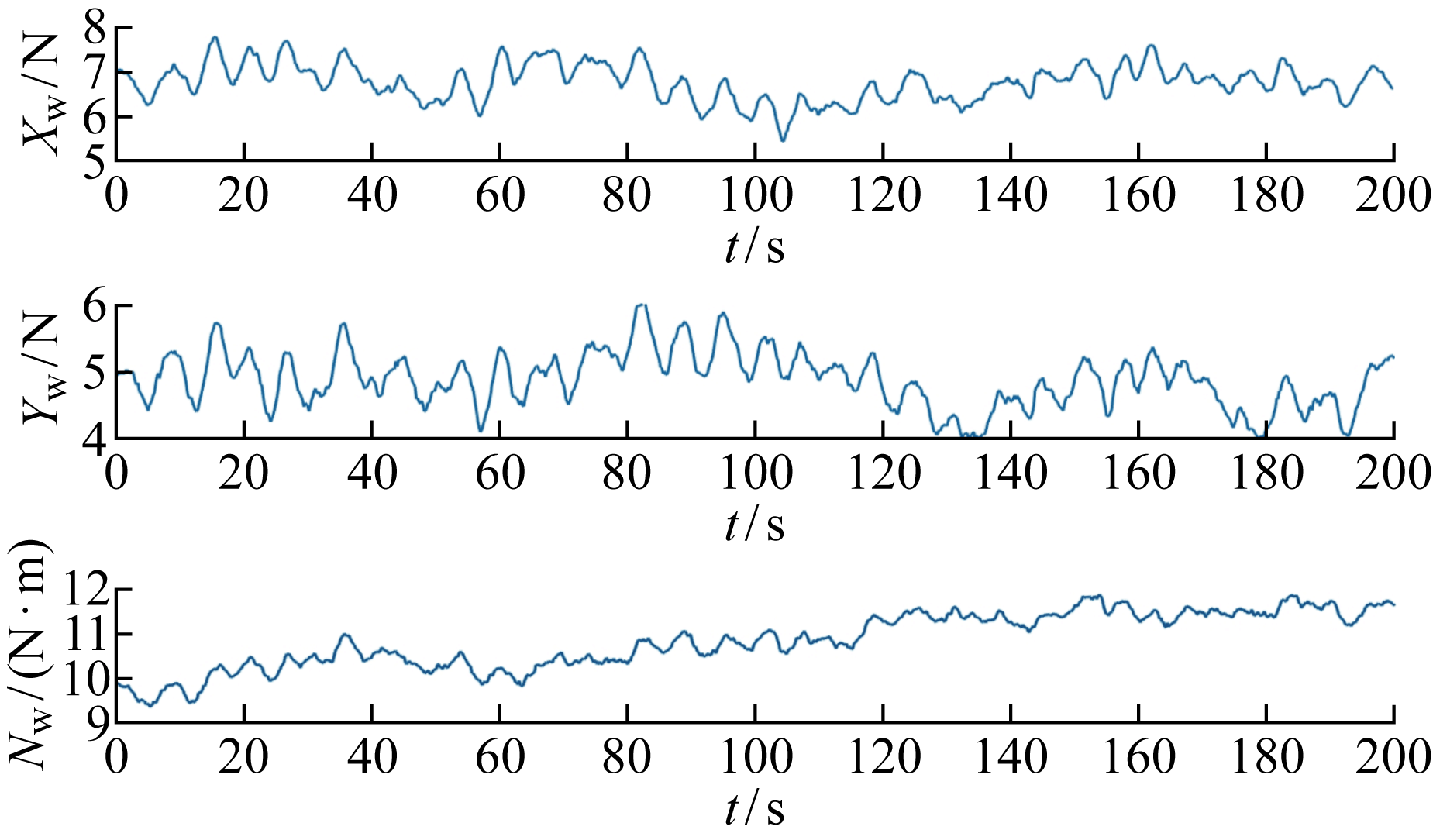
Fig.6
Simulation results of ship course control
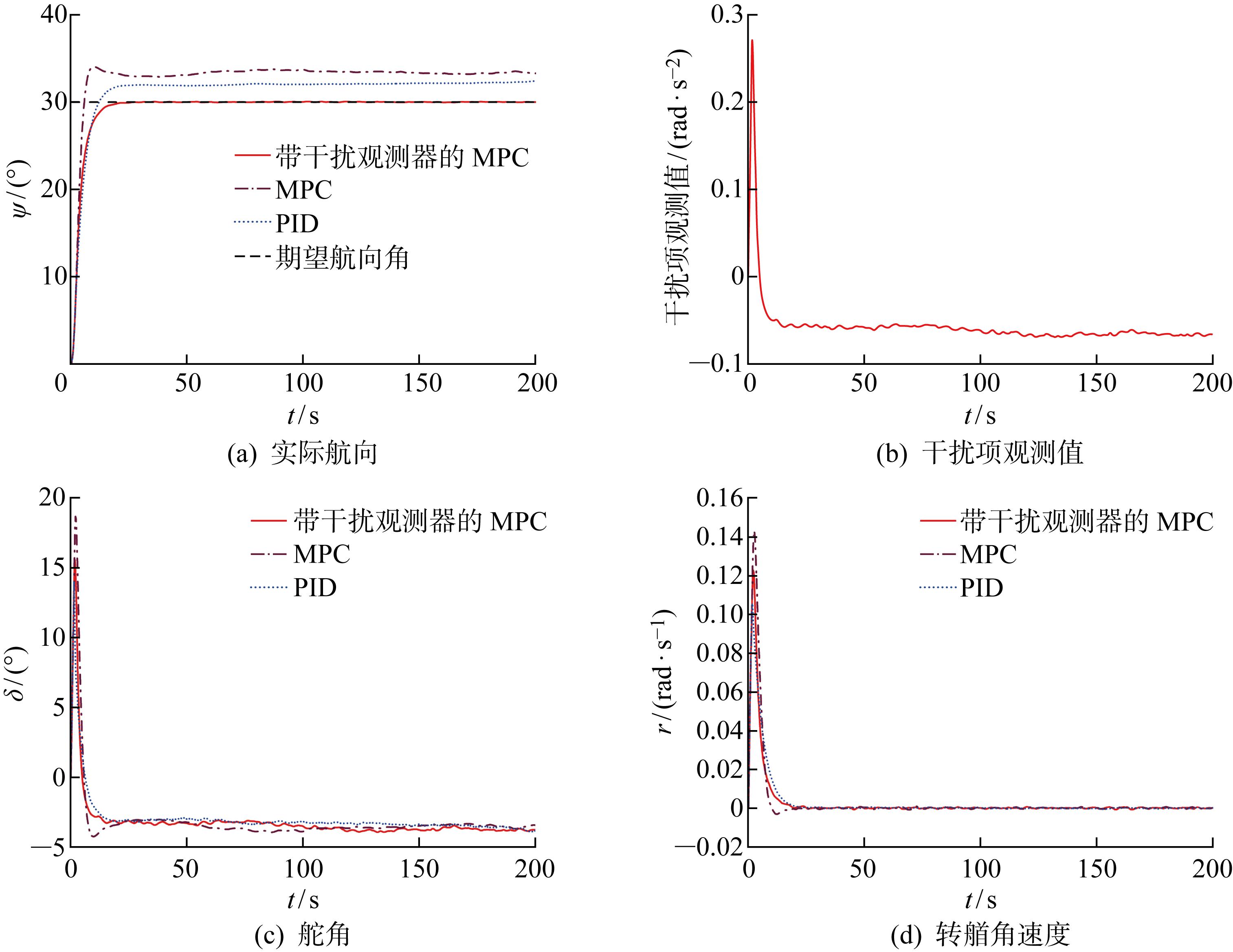
Tab.1
Comparison of course-control simulation results
| 控制方法 | 航向角的 RMSE/(°) | 航向角 稳态误差/(°) |
|---|---|---|
| 带干扰观测器的MPC | 0.61 | 0 |
| MPC | 2.84 | 3.44 |
| PID | 1.28 | 2.10 |
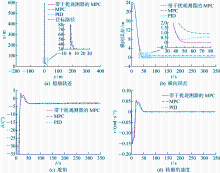
Fig.7
Simulation results of ship path following
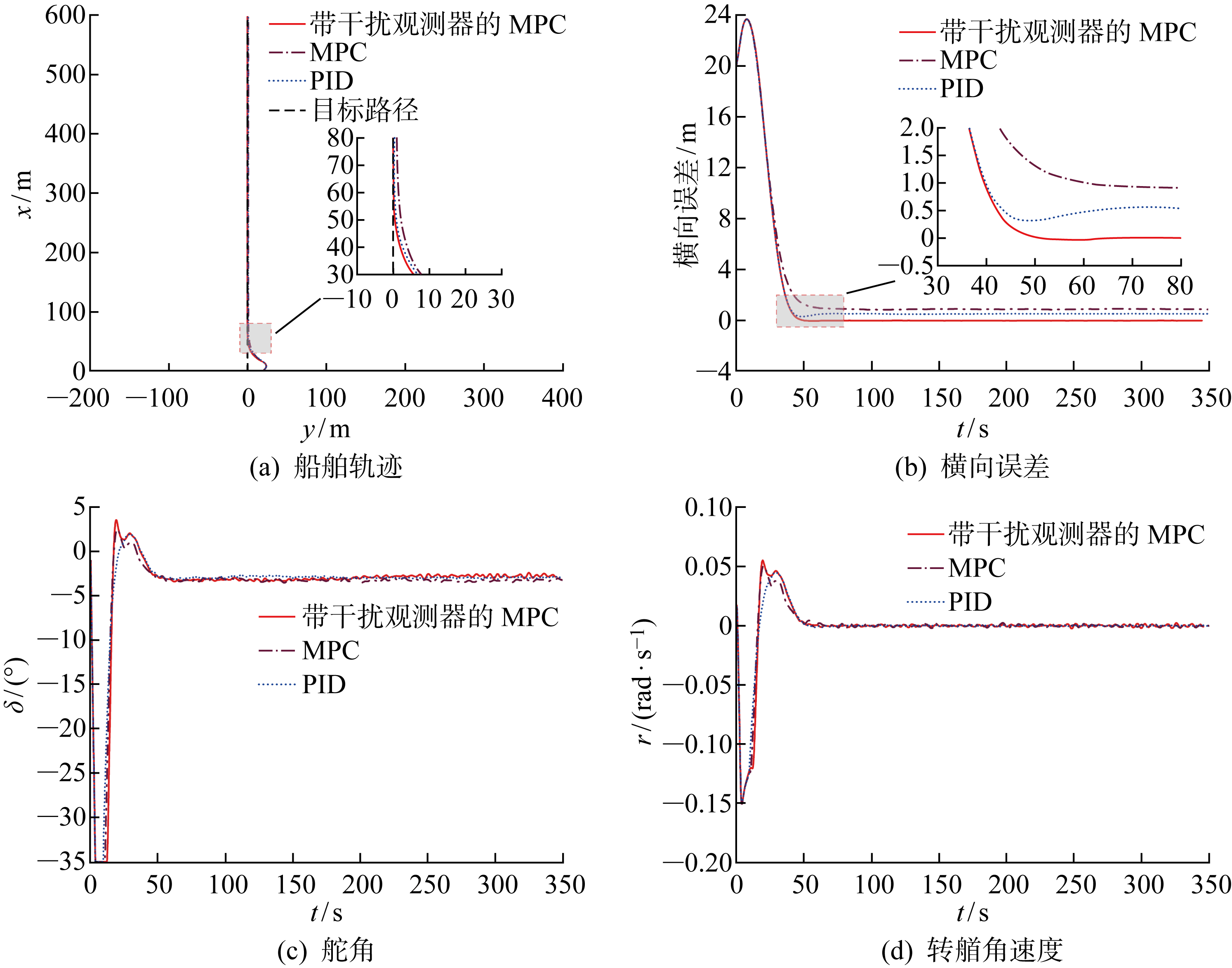
Fig.8
Simulation results of ship collision avoidance
| [1] | MOREIRA L, FOSSEN T I, GUEDES SOARES C. Path following control system for a tanker ship model[J]. Ocean Engineering, 2007, 34(14): 2074-2085. |
| [2] | BORHAUG E, PAVLOV A, PETTERSEN K Y. Integral LOS control for path following of underactuated marine surface vessels in the presence of constant ocean currents[C]//IEEE Conference on Decision and Control. Cancun, Mexico: IEEE, 2008: 4984-4991. |
| [3] | FOSSEN T I, PETTERSEN K Y, GALEAZZI R. Line-of-sight path following for Dubins paths with adaptive sideslip compensation of drift forces[J]. IEEE Transactions on Control Systems Technology, 2015, 23(2): 820-827. |
| [4] |
NIE J, LIN X. Improved adaptive integral line-of-sight guidance law and adaptive fuzzy path following control for underactuated MSV[J]. ISA Transactions, 2019, 94: 151-163.
doi: S0019-0578(19)30184-3 pmid: 31053360 |
| [5] | NELSON D R, BARBER D B, MCLAIN T W, et al. Vector field path following for small unmanned air vehicles[C] //2006 American Control Conference. Minneapolis, USA: IEEE, 2006: 7. |
| [6] | NELSON D R, BARBER D B, MCLAIN T W, et al. Vector field path following for miniature air vehicles[J]. IEEE Transactions on Robotics, 2017, 23(3): 519-529. |
| [7] | XU H T, FOSSEN T I, GUEDES SOARES C. Uniformly semiglobally exponential stability of vector field guidance law and autopilot for path-following[J]. European Journal of Control, 2020, 53: 88-97. |
| [8] | XU H T, HINOSTROZA M A, GUEDES SOARES C. Modified vector field path-following control system for an underactuated autonomous surface ship model in the presence of static obstacles[J]. Journal of Marine Science and Engineering, 2021, 9(6): 652. |
| [9] | SMIERZCHALSKI R. Evolutionary trajectory planning of ships in navigation traffic areas[J]. Journal Marine Science and Technology, 1999, 4(1): 1-6. |
| [10] | 周凤杰. 船舶避碰的粒子群-遗传(PSO-GA)的混合优化算法研究[J]. 船舶力学, 2021, 25(7): 909-916. |
| ZHOU Fengjie. Research on hybrid optimization algorithm of particle swarm-genetic (PSO-GA) for ship collision avoidance[J]. Journal of Ship Mechanics, 2021, 25(7): 909-916. | |
| [11] | ABDELAAL M, FRANZLR M, HAHN A. Nonlinear model predictive control for trajectory tracking and collision avoidance of underactuated vessels with disturbances[J]. Ocean Engineering, 2018, 160: 168-180. |
| [12] | LIU Z L, SONG S M, YUAN S Z, et al. ALOS-based USV path-following control with obstacle avoidance strategy[J]. Journal of Marine Science and Engineering, 2022, 10(9): 1203. |
| [13] | 陆潇杨, 刘志全, 高迪驹, 等. 带漂角和输入饱和的水面船舶航向控制[J]. 中国舰船研究, 2021, 16(2): 194-202. |
| LU Xiaoyang, LIU Zhiquan, GAO Diju, et al. Surface ship heading control with sideslip angle and input saturation[J]. Chinese Journal of Ship Research, 2021, 16(2): 194-202. | |
| [14] | QIU B, WANG G, FAN Y, et al. Adaptive sliding mode trajectory tracking control for unmanned surface vehicle with modeling uncertainties and input saturation[J]. Applied Sciences, 2019, 9(6): 1240. |
| [15] | 柳晨光, 初秀民, 王乐, 等. 欠驱动水面船舶的轨迹跟踪模型预测控制器[J]. 上海交通大学学报, 2015, 49(12): 1842-1854. |
| LIU Chenguang, CHU Xiumin, WANG Le, et al. Trajectory tracking controller for underactuated surface vessels based on model predictive control[J]. Journal of Shanghai Jiao Tong University, 2015, 49(12): 1842-1854. | |
| [16] | WANG L, LI S J, LIU J L, et al. Data-driven model identification and predictive control for path-following of underactuated ships with unknown dynamics[J]. International Journal of Naval Architecture and Ocean Engineering, 2022, 14: 100445. |
| [17] | ZHANG H G, ZHANG X K, BU R X. Active disturbance rejection control of ship course keeping based on nonlinear feedback and ZOH component[J]. Ocean Engineering, 2021, 233: 109136. |
| [18] | YANG H L, DENG F, HE Y, et al. Robust nonlinear model predictive control for reference tracking of dynamic positioning ships based on nonlinear disturbance observer[J]. Ocean Engineering, 2020, 215: 107885. |
| [19] |
贺宏伟, 邹早建, 曾智华. 欠驱动水面船舶的自适应神经网络-滑模路径跟随控制[J]. 上海交通大学学报, 2020, 54(9): 890-897.
doi: 10.16183/j.cnki.jsjtu.2019.122 |
| HE Hongwei, ZOU Zaojian, ZENG Zhihua. Adaptive NN-SM control for path following of underactuated surface vessel[J]. Journal of Shanghai Jiao Tong University, 2020, 54(9): 890-897. | |
| [20] | DU J, HU X, KRSTIĆ M, et al. Robust dynamic positioning of ships with disturbances under input saturation[J]. Automatica, 2016, 73: 207-214. |
| [21] | MAYNE D Q, RAWLINGS J B, RAO C V, et al. Constrained model predictive control: Stability and optimality[J]. Automatica, 2000, 36(6): 789-814. |
| [22] | ZENG Z H, ZOU Z J, WANG Z H, et al. Path following of underactuated marine vehicles based on model predictive control[J]. International Journal of Offshore and Polar Engineering, 2020, 30(4): 463-470. |
| [23] | LI Z X, LI R H, BU R X. Path following of under-actuated ships based on model predictive control with state observer[J]. Journal of Marine Science and Technology, 2021, 26(2): 408-418. |
| [24] | FOSSEN T I. Handbook of marine craft hydrodynamics and motion control[M]. New York, USA: John Wiley & Sons, 2011. |
| [25] | NMRI. Tokyo 2015: A workshop on CFD in ship hydrodynamics[DB/OL]. (2015-12-02)[2023-04-02]. https://t2015.nmri.go.jp/onrt_gc.html. |
| [26] | GUO H P, ZOU Z J. System-based investigation on 4-DOF ship maneuvering with hydrodynamic derivatives determined by RANS simulation of captive model tests[J]. Applied Ocean Research, 2017, 68: 11-25. |
| [1] | LIU Yuesheng (刘月笙), HE Ning∗ (贺宁), HE Lile (贺利乐),ZHANG Yiwen (张译文), XI Kun (习坤), ZHANG Mengrui (张梦芮). Self-Tuning of MPC Controller for Mobile Robot Path Tracking Based on Machine Learning [J]. J Shanghai Jiaotong Univ Sci, 2024, 29(6): 1028-1036. |
| [2] | ZHANG Xiaotian1(张啸天), HE Defeng1* (何德峰), LIAO Fei2 (廖飞). Iterative Model Predictive Control for Automatic Carrier Landing of Carrier-Based Aircrafts Under Complex Surroundings and Constraints [J]. J Shanghai Jiaotong Univ Sci, 2024, 29(4): 712-724. |
| [3] | MU Jianbin∗ (穆建彬), YANG Haili (杨海丽), HE Defeng (何德峰). CBF-Based Distributed Model Predictive Control for Safe Formation of Autonomous Mobile Robots [J]. J Shanghai Jiaotong Univ Sci, 2024, 29(4): 678-688. |
| [4] | JIN Feiyu (金飞宇), CHEN Longsheng∗ (陈龙胜), LI Tongshuai (李统帅), SHI Tongxin (石童昕). Distributed Cooperative Anti-Disturbance Control for High-Order MIMO Nonlinear Multi-Agent Systems [J]. J Shanghai Jiaotong Univ Sci, 2024, 29(4): 656-666. |
| [5] | LIU Chuanbin, JIAO Wenshu, WU Qiuwei, CHEN Jian, ZHOU Qian. Strategy of Wind-Storage Combined System Participating in Power System Secondary Frequency Regulation Based on Model Predictive Control [J]. Journal of Shanghai Jiao Tong University, 2024, 58(1): 91-101. |
| [6] | YU Te, LIU Jiapeng, WU Chao, ZHOU Chang, ZHOU Shengzeng, WANG Lei. USV and AUV Cooperative Control Strategy Based on Nonlinear Disturbance Observer [J]. Journal of Shanghai Jiao Tong University, 2023, 57(S1): 114-123. |
| [7] | JIANG Enyu, CHEN Yu, SHI Zhengjing, WU Zhecheng, LIN Shunfu, LI Dongdong. A Microgrid Energy Management Strategy Considering Carbon Quota Guided Demand Response [J]. Journal of Shanghai Jiao Tong University, 2023, 57(9): 1126-1136. |
| [8] | ZHANG Chenyu, MENG Shuai. Simulation Study of Reentry Dynamics of a Deep-Water Drilling Riser System Based on Model Predictive Control [J]. Journal of Shanghai Jiao Tong University, 2023, 57(11): 1389-1399. |
| [9] | YAO Laipeng (姚来鹏), HOU Baolin ∗(侯保林), LIU Xi (刘曦). Fast Smooth Second-Order Sliding Mode Control with Disturbance Observer for Automatic Shell Magazine [J]. J Shanghai Jiaotong Univ Sci, 2021, 26(6): 847-856. |
| [10] | WANG Jiaqi, GUO Jianguo, GUO Zongyi, ZHAO Bin. Sliding Mode Control of High Mach Number Aircraft Based on Disturbance Observer [J]. Air & Space Defense, 2021, 4(3): 85-91. |
| [11] | GONG Zhenghua, SONG Chenwei, LI Gangqiang, CHEN Jianping, XU Zijing, YUAN Jingqi . Model Predictive Control for Steering System of Water-Jet Propulsion [J]. Journal of Shanghai Jiao Tong University (Science), 2020, 25(3): 299-303. |
| [12] | ZHANG Xiaoyu, ZHANG Peng, ZHENG Xin, NI Yuanhua. Terminal Angle Constraint Sliding Mode Guidance Law Design Based on Fixed-time Convergence [J]. Air & Space Defense, 2020, 3(3): 9-15. |
| [13] | MA Changpu,ZHOU Binghai. Scheduling of Multi-Load Rail Guided Vehicles in AS/RS with Collision Avoidance Constrains [J]. Journal of Shanghai Jiaotong University, 2020, 54(2): 126-134. |
| [14] | ZHUANG Peng,FENG Zhengping,BI Anyuan,ZHENG Tianhai,PAN Wanjun,ZHAO Shuo. Depth Composite Control of Low Speed Underwater Vehicle Near Surface [J]. Journal of Shanghai Jiaotong University, 2019, 53(9): 1084-1090. |
| [15] | LI Donghui,GAO Feng. Improved Smith Predictive Decoupling Control Based on Disturbance Observer for Compression Refrigeration System [J]. Journal of Shanghai Jiaotong University, 2019, 53(5): 593-599. |
| Viewed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
Full text |
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
Abstract 403
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||