Journal of Shanghai Jiao Tong University ›› 2023, Vol. 57 ›› Issue (5): 545-551.doi: 10.16183/j.cnki.jsjtu.2021.356
Special Issue: 《上海交通大学学报》2023年“生物医学工程”专题
• Biomedical Engineering • Previous Articles Next Articles
ZHUANG Haoyu1, YAN Guozheng1( ), FEI Qian1, WANG Wei1, ZHAO Kai1
), FEI Qian1, WANG Wei1, ZHAO Kai1
Received:2021-09-13
Revised:2022-09-30
Accepted:2021-11-10
Online:2023-05-28
Published:2023-06-02
Contact:
YAN Guozheng
E-mail:gzhyan@sjtu.edu.cn.
CLC Number:
ZHUANG Haoyu, YAN Guozheng, FEI Qian, WANG Wei, ZHAO Kai. Characteristics of a Hybrid Three-Dimensional Transmitting Coil for Wireless Power Transmission of Intestinal Robot[J]. Journal of Shanghai Jiao Tong University, 2023, 57(5): 545-551.
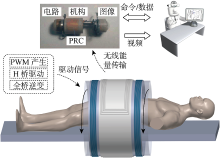
Fig.1
Application scenario of designed WPT system for CR
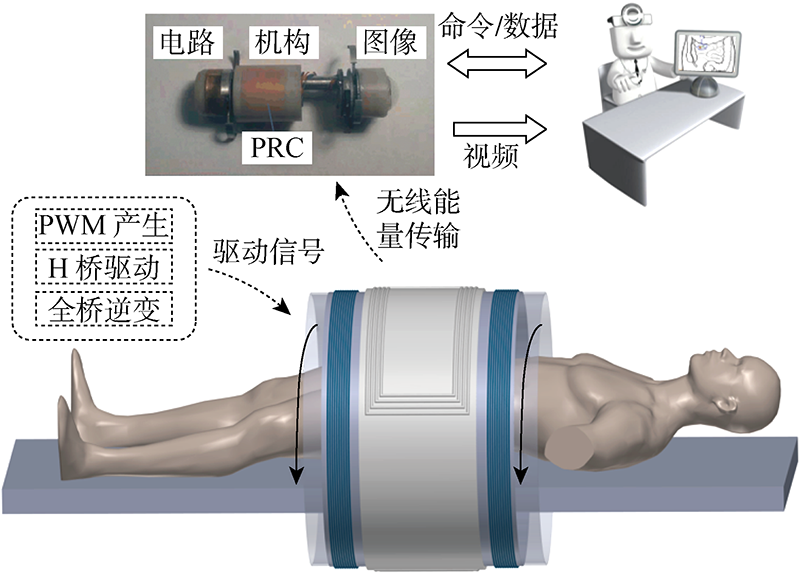
Fig.2
Typical equivalent circuit model of WPT system for CR

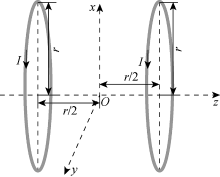
Fig.3
Schematic of HCP

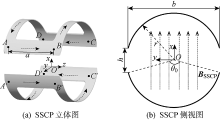
Fig.4
Schematic of SSCP


Fig.5
Non-uniformity simulation results of SSCP in the test area

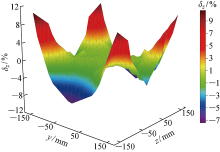
Fig.6
Non-uniformity simulation results of HCP in the test area

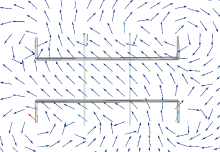
Fig.7
Synthetic magnetic field at the same excitation
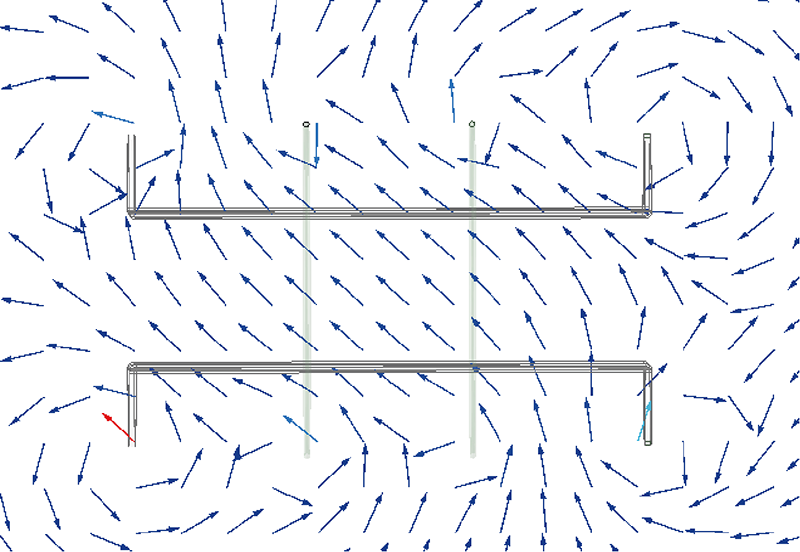

Fig.8
Magnetic induction intensities along coordinate axis at different rotation angles

Fig.9
Implemented prototype and experimental setup
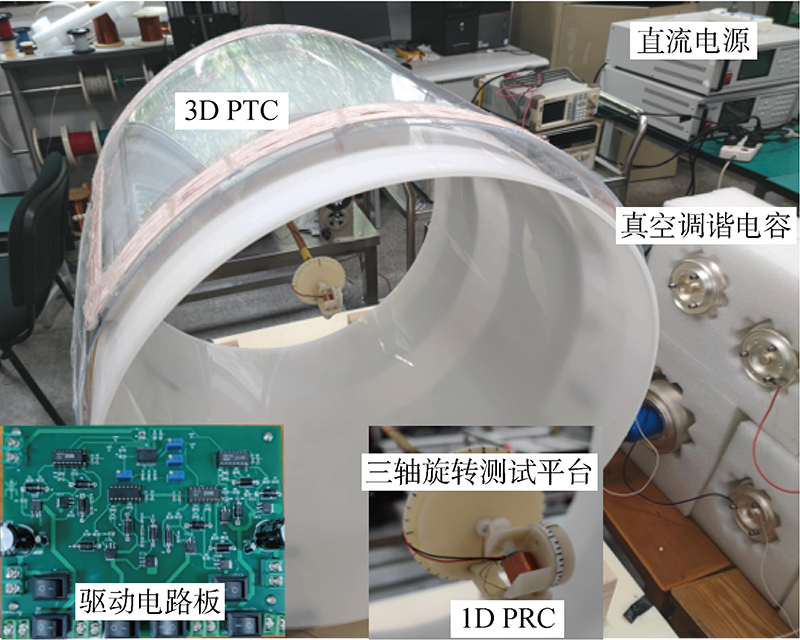
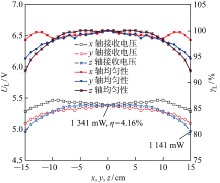
Fig.10
Receiving voltage and positional uniformity test for HCP


Fig.11
Receiving voltage and positional uniformity test for SSCP


Fig.12
Receiving voltage with different angular offsets

| [1] |
WANG W, YAN G Z, HAN D, et al. Design and testing of a novel gastrointestinal microrobot[J]. Biomedical Microdevices, 2020, 22(4): 1-11.
doi: 10.1007/s10544-019-0454-1 |
| [2] |
WANG W, YAN G Z, WANG Z W, et al. A novel expanding mechanism of gastrointestinal microrobot: Design, analysis and optimization[J]. Micromachines, 2019, 10(11): 724.
doi: 10.3390/mi10110724 URL |
| [3] | 蒲鹏先, 颜国正, 王志武, 等. 微型肠道机器人扩张机构与能量接收线圈的设计与实验[J]. 上海交通大学学报, 2019, 53(10): 1143-1150. |
| PU Pengxian, YAN Guozheng, WANG Zhiwu, et al. Design and experiment of expanding mechanism and power receiving coil for micro intestinal robot[J]. Journal of Shanghai Jiao Tong University, 2019, 53(10): 1143-1150. | |
| [4] |
GAO J Y, YAN G Z, WANG Z W, et al. Design and testing of a motor-based capsule robot powered by wireless power transmission[J]. IEEE/ASME Transactions on Mechatronics, 2016, 21(2): 683-693.
doi: 10.1109/TMECH.2015.2497083 URL |
| [5] |
BASAR M, AHMAD M, CHO J, et al. Application of wireless power transmission systems in wireless capsule endoscopy: An overview[J]. Sensors, 2014, 14(6): 10929-10951.
doi: 10.3390/s140610929 pmid: 24949645 |
| [6] |
KIM H J, HIRAYAMA H, KIM S, et al. Review of near-field wireless power and communication for biomedical applications[J]. IEEE Access, 2017, 5: 21264-21285.
doi: 10.1109/Access.6287639 URL |
| [7] |
CAMPI T, CRUCIANI S, DE SANTIS V, et al. Near field wireless powering of deep medical implants[J]. Energies, 2019, 12(14): 2720.
doi: 10.3390/en12142720 URL |
| [8] |
NG W M, ZHANG C, LIN D Y, et al. Two-and three-dimensional omnidirectional wireless power transfer[J]. IEEE Transactions on Power Electronics, 2014, 29(9): 4470-4474.
doi: 10.1109/TPEL.2014.2300866 URL |
| [9] |
HA-VAN N, SEO C. Analytical and experimental investigations of omnidirectional wireless power transfer using a cubic transmitter[J]. IEEE Transactions on Industrial Electronics, 2018, 65(2): 1358-1366.
doi: 10.1109/TIE.2017.2733470 URL |
| [10] |
KHAN S R, PAVULURI S K, CUMMINS G, et al. Miniaturized 3-D cross-type receiver for wirelessly powered capsule endoscopy[J]. IEEE Transactions on Microwave Theory and Techniques, 2019, 67(5): 1985-1993.
doi: 10.1109/TMTT.22 URL |
| [11] | RYU M, KIM J D, CHIN H U, et al. Three-dimensional power receiver for in vivo robotic capsules[J]. Medical & Biological Engineering & Computing, 2007, 45(10): 997-1002. |
| [12] | 温桠妮, 颜国正, 王志武, 等. 肠道机器人三维接收线圈的设计与优化[J]. 上海交通大学学报, 2020, 54(11): 1117-1123. |
| WEN Yani, YAN Guozheng, WANG Zhiwu, et al. Design and optimization of three-dimensional receiving coils for intestinal robots[J]. Journal of Shanghai Jiao Tong University, 2020, 54(11): 1117-1123. | |
| [13] |
MA G Y, YAN G Z, HE X. Power transmission for gastrointestinal microsystems using inductive coupling[J]. Physiological Measurement, 2007, 28(3): 9-18.
pmid: 17322587 |
| [14] |
BEIRANVAND R. Analyzing the uniformity of the generated magnetic field by a practical one-dimensional Helmholtz coils system[J]. Review of Scientific Instruments, 2013, 84(7): 075109.
doi: 10.1063/1.4813275 URL |
| [15] |
WU W F, ZHOU B Q, LIU G, et al. Novel nested saddle coils used in miniature atomic sensors[J]. AIP Advances, 2018, 8(7): 075126.
doi: 10.1063/1.5036605 URL |
| [16] |
KE Q, LUO W J, YAN G Z, et al. Analytical model and optimized design of power transmitting coil for inductively coupled endoscope robot[J]. IEEE Transactions on Biomedical Engineering, 2016, 63(4): 694-706.
doi: 10.1109/TBME.2015.2469137 URL |
| [17] |
GAO J Y, YAN G Z, WANG Z W, et al. A capsule robot powered by wireless power transmission: Design of its receiving coil[J]. Sensors and Actuators A: Physical, 2015, 234: 133-142.
doi: 10.1016/j.sna.2015.08.021 URL |
| [18] | 庄浩宇, 颜国正, 赵凯, 等. 用于肠道机器人的螺旋式平板发射线圈对设计[J]. 光学精密工程, 2021, 29(1): 84-90. |
|
ZHUANG Haoyu, YAN Guozheng, ZHAO Kai, et al. Design of spiral flat transmitting coil pair for intestinal robot[J]. Optics and Precision Engineering, 2021, 29(1): 84-90.
doi: 10.37188/OPE.20212901.0084 URL |
|
| [19] |
CHEN W W, YAN G Z, WANG Z W, et al. A wireless capsule robot with spiral legs for human intestine[J]. The International Journal of Medical Robotics and Computer Assisted Surgery, 2014, 10(2): 147-161.
doi: 10.1002/rcs.1520 pmid: 23843276 |
| [1] | LIU Dasheng∗ (刘大生), YAN Guozheng (颜国正). Biomechanical Analysis of a Radial Expansion Mechanism of Intestinal Robot Coupling with Hyperelastic Intestinal Wall [J]. J Shanghai Jiaotong Univ Sci, 2022, 27(4): 552-560. |
| [2] | XUE Rongrong, WANG Zhiwu, YAN Guozheng, ZHUANG Haoyu. Noise Reduction Method for Intestinal Image Acquired by Intestinal Robot [J]. Journal of Shanghai Jiao Tong University, 2021, 55(10): 1303-1309. |
| [3] | WEN Yani, YAN Guozheng, WANG Zhiwu, JIANG Pingping, XUE Rongrong, WANG Yiyun. Design and Optimization of Three-Dimensional Receiving Coils for Intestinal Robots [J]. Journal of Shanghai Jiaotong University, 2020, 54(11): 1117-1123. |
| [4] | PU Pengxian,YAN Guozheng,WANG Zhiwu,HAN Ding. Design and Experiment of Expanding Mechanism and Power Receiving Coil for Micro Intestinal Robot [J]. Journal of Shanghai Jiaotong University, 2019, 53(10): 1143-1150. |
| [5] | LI Dawei,JIANG Pingping,KE Quan,YAN Guozheng. Optimal Design of Wireless Power Transfer System for Gastrointestinal Robots [J]. Journal of Shanghai Jiaotong University, 2018, 52(9): 1031-1037. |
| [6] | SHEN Yue1,JIANG Zhihua2,YAN Guozheng1,KE Quan1,WANG Yongbing1. Optimization and Realization of Wireless Capsule Robot [J]. Journal of Shanghai Jiaotong University, 2018, 52(1): 39-44. |
| [7] | LIN Wei, YAN Guo-Zheng. The Critical Stroke Model of Anchoring-Extending Gastrointestinal Micro Robot and Its Experimental Study [J]. Journal of Shanghai Jiaotong University, 2013, 47(04): 656-662. |
| Viewed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
Full text 281
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
Abstract 307
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||