Journal of Shanghai Jiaotong University ›› 2020, Vol. 54 ›› Issue (9): 943-952.doi: 10.16183/j.cnki.jsjtu.2020.99.008
Previous Articles Next Articles
QI Jiyan, JIN Jiaqi, FU Jingshun( )
)
Received:2019-09-12
Online:2020-09-28
Published:2020-10-10
Contact:
FU Jingshun
E-mail:fujingshun@sut.edu.cn
CLC Number:
QI Jiyan, JIN Jiaqi, FU Jingshun. Yaw Stability Control of Carrier-Based Aircraft Towbarless Tractor Carrier[J]. Journal of Shanghai Jiaotong University, 2020, 54(9): 943-952.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2020.99.008
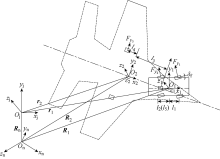
Fig.1
Carrier-based aircraft tractor traction system model

Fig.2
Δkξ output surface on fuzzy domain
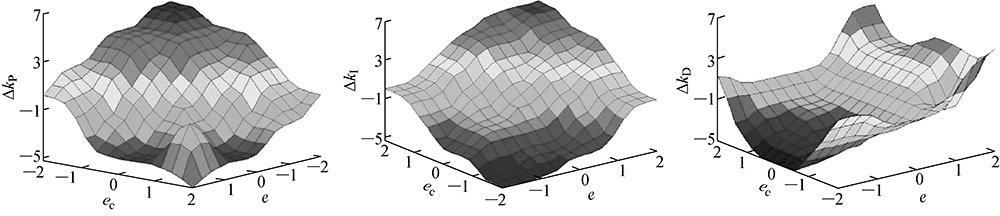

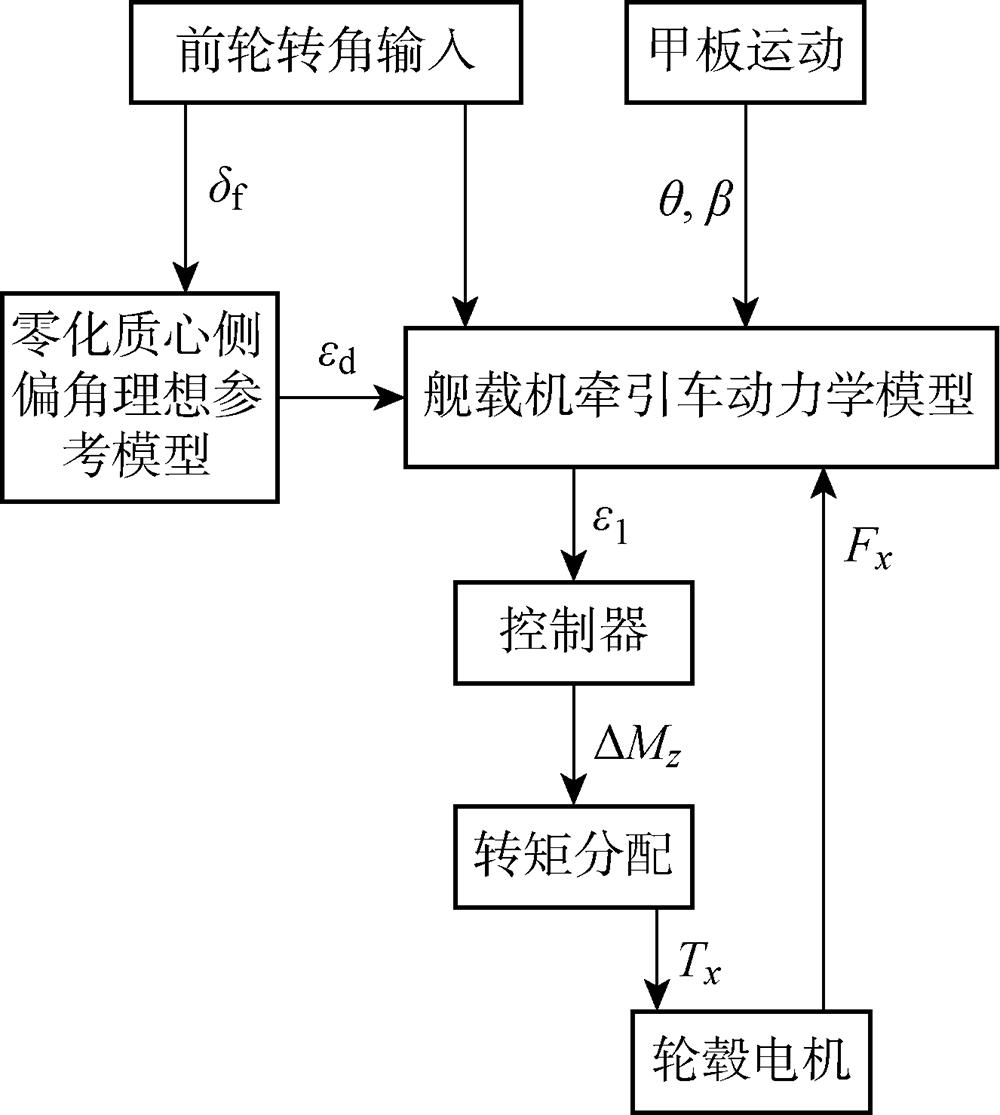
Fig.3
Simulation model of target tractor control
Tab.1
Structural parameters of target tractor
| 参数 | 取值 |
|---|---|
| m1/kg | 1000 |
| uc/(km·h-1) | 5.5 |
| h1/m | 0.3 |
| l1/m | 0.576 |
| l2/m | 1.153 |
| l5/m | 1.153 |
| Iz1/(kg·m-2) | 385.09 |
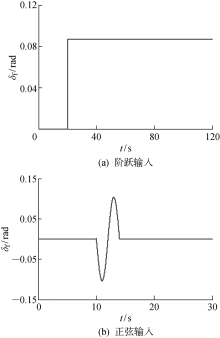
Fig.4
Input of front wheel angle
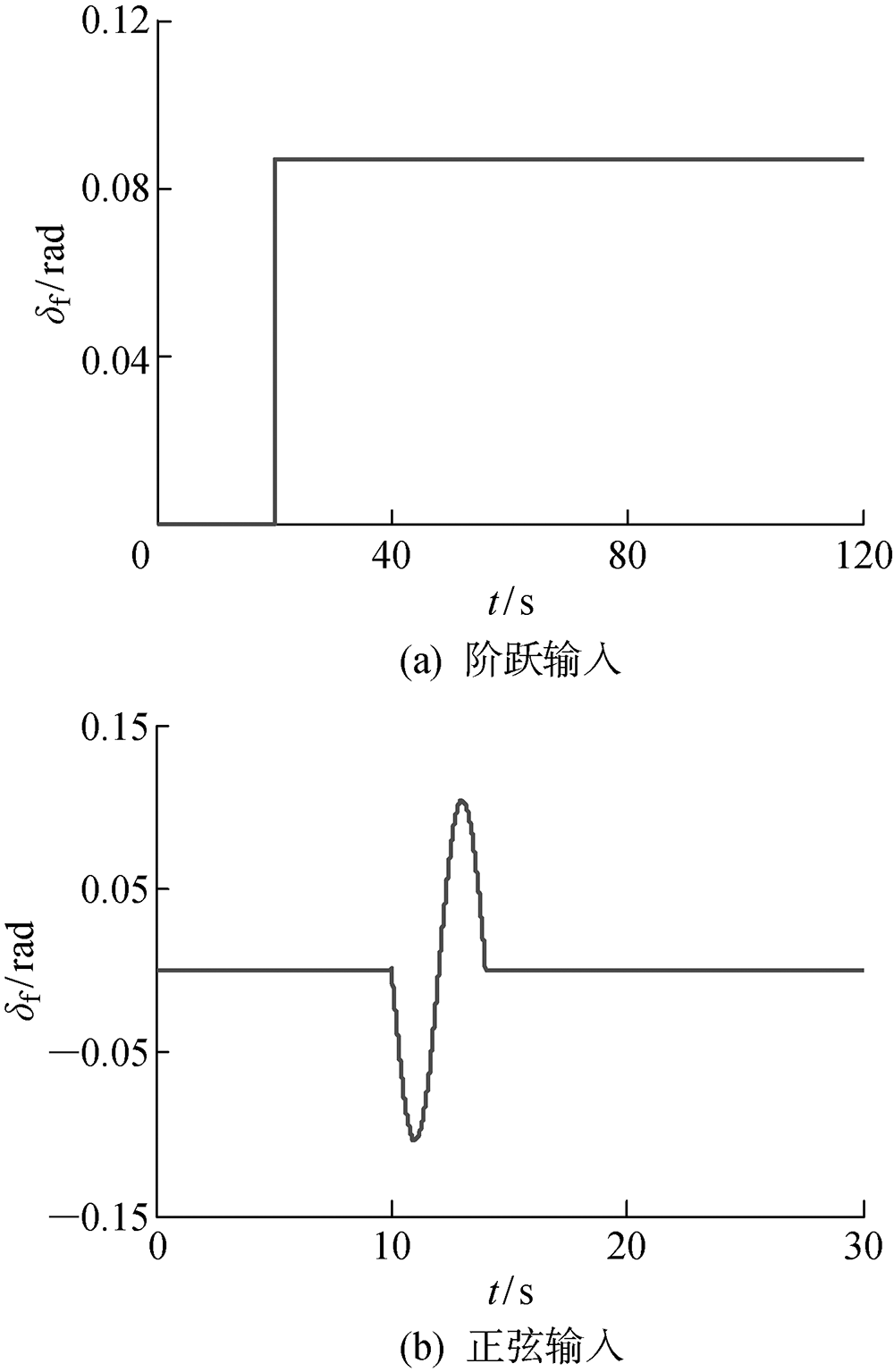

Fig.5
Comparison of yaw angular velocity simulation results
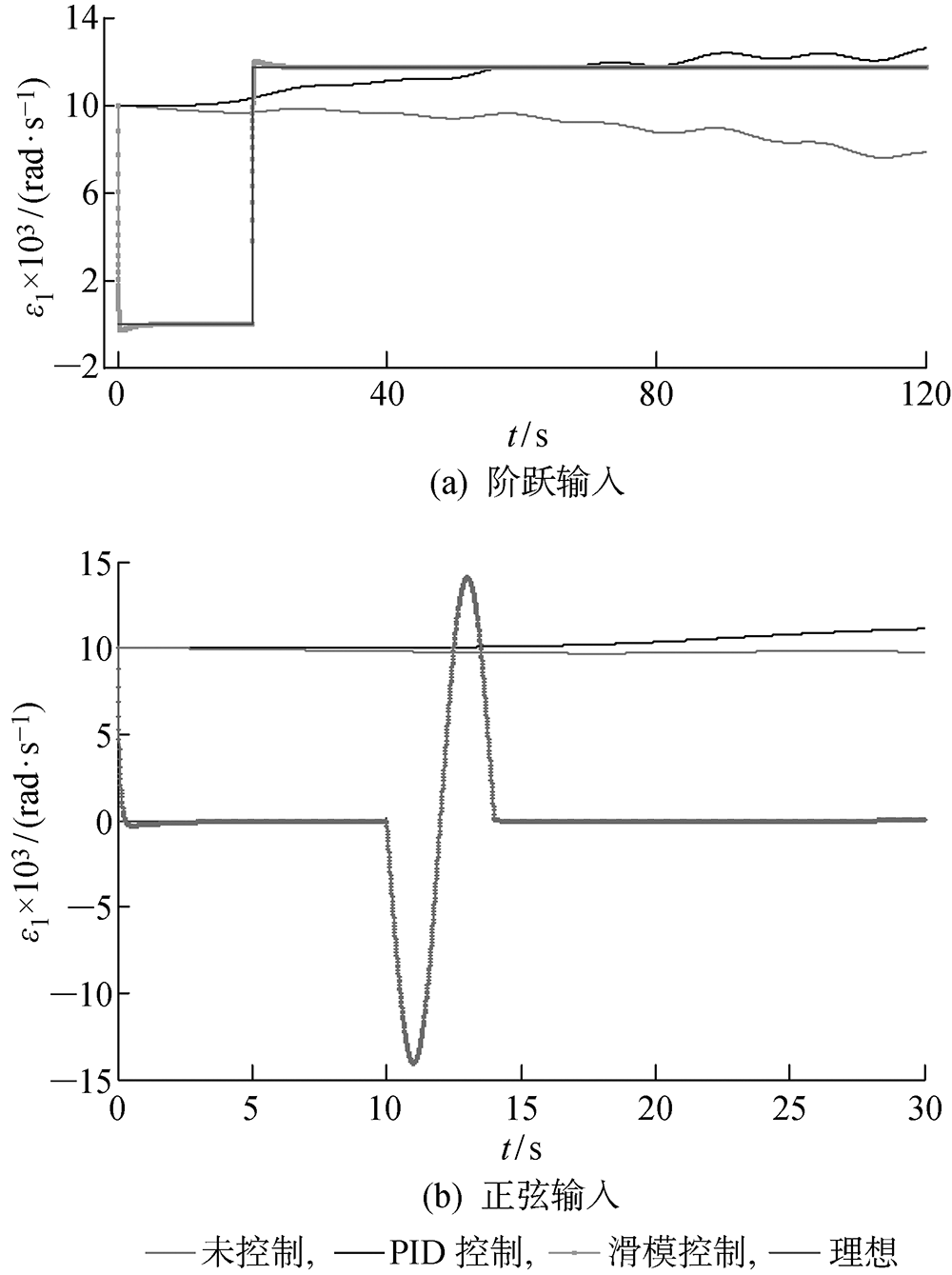

Fig.6
Comparison of yaw rate with step inputs
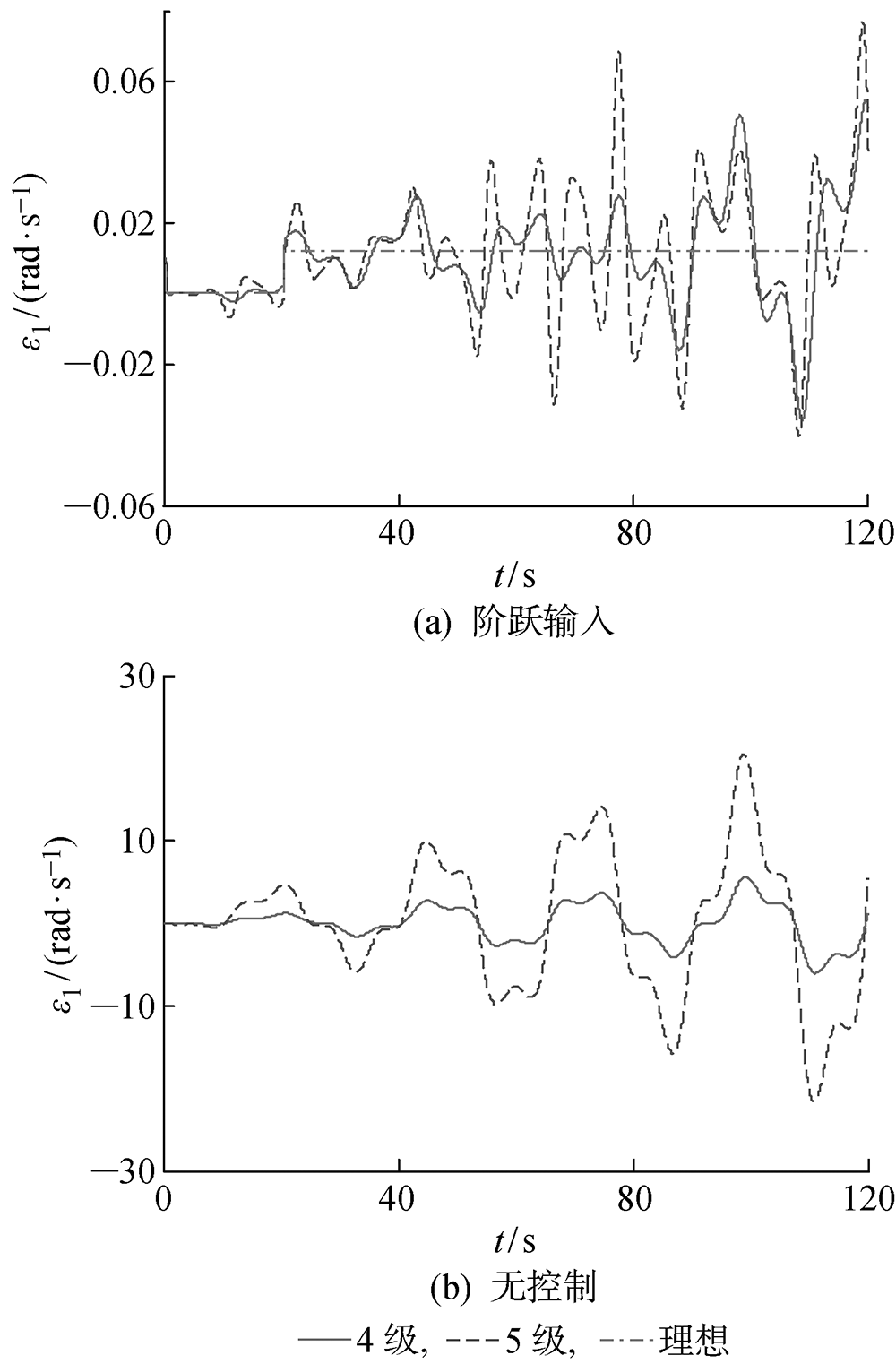

Fig.7
Comparison of yaw rates with sine inputs
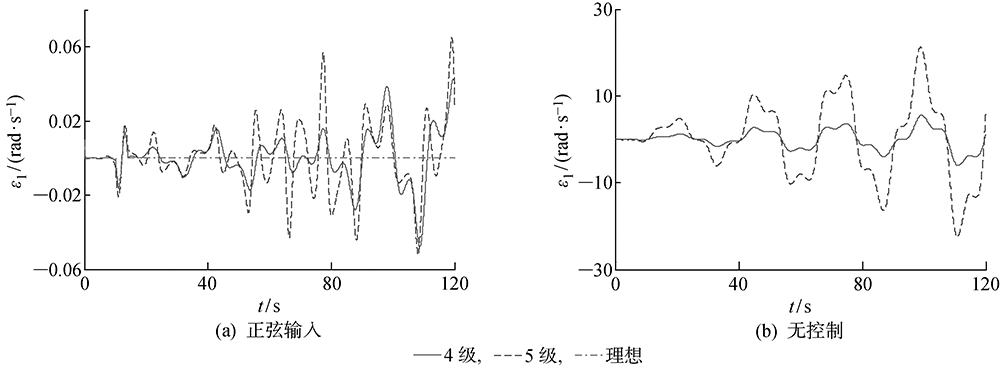

Fig.8
Comparison of yaw rates at sea level 6

Tab.2
Statistics of yaw rates in different sea states (rad/s)
| 输入类型 | 海况等级 | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 4级 | 5级 | 6级 | 理想值 | |||||||||||
| ε1,max | ε1,min | ε1,max | ε1,min | ε1,max | ε1,min | ε1,max | ε1,min | |||||||
| 阶跃 | 0.14440 | -0.11820 | 0.04024 | -0.07695 | 1.736 | -2.107 | 0.01176 | 0 | ||||||
| 正弦 | 0.04285 | -0.04772 | 0.06519 | -0.05200 | 1.724 | -2.119 | 0.01406 | -0.01406 | ||||||
| [1] | 王能建, 周丽杰, 刘红博. 甲板上牵引车-直升机系统的稳定性控制[J]. 上海交通大学学报, 2012,46(7):1146-1152. |
| WANG Nengjian, ZHOU Lijie, LIU Hongbo. Study on stability control for tractor-helicopter system on deck[J]. Journal of Shanghai Jiao Tong University, 2012,46(7):1146-1152. | |
| [2] | 刘洁, 韩维, 徐卫国, 等. 基于滚动时域的舰载机甲板运动轨迹跟踪最优控制[J]. 航空学报, 2019,40(8):180-205. |
| LIU Jie, HAN Wei, XU Weiguo, et al. Optimal path tracking control of carrier-based aircraft on the deck based on RHC[J]. Acta Aeronautica et Astronautica Sinica, 2019,40(8):180-205. | |
| [3] | 张竞, 吴宇, 屈香菊. 舰载机牵引系统路径规划方法[J]. 北京航空航天大学学报, 2018,44(10):2125-2133. |
| ZHANG Jing, WU Yu, QU Xiangju. Path planning method for traction system on carrier aircraft[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018,44(10):2125-2133. | |
| [4] | 解本铭, 赵宏伟, 王伟, 等. 遥控无杆飞机牵引车牵引转弯的运动学研究[J]. 机械设计与制造, 2018(7):127-129. |
| XIE Benming, ZHAO Hongwei, WANG Wei, et al. Kinematics research on towing turning of remote control towbarless aircraft tractor[J]. Machinery Design & Manufacture, 2018(7):127-129. | |
| [5] | 王能建, 刘红博, 周丽杰. 甲板上舰载机牵引系统的行驶特性分析[J]. 中南大学学报(自然科学版), 2013,44(6):2304-2310. |
| WANG Nengjian, LIU Hongbo, ZHOU Lijie. Moving characteristics analysis of carrier-based aircraft traction system on deck[J]. Journal of Central South University (Science and Technology), 2013,44(6):2304-2310. | |
| [6] | 王正, 黄葵, 范加利. 基于无杆牵引车的舰载机路径跟踪控制[J]. 计算机测量与控制, 2017,25(5):99-100. |
| WANG Zheng, HUANG Kui, FAN Jiali. Path tracking control for carrier aircraft handled by tractor without bar[J]. Computer Measurement & Control, 2017,25(5):99-100. | |
| [7] | WANG N J, LIU H B, YANG W H. Path-tracking control of a tractor-aircraft system[J]. Journal of Marine Science and Application, 2012,11(4):512-517. |
| [8] | ASIABAR A N, KAZEMI R. A direct yaw moment controller for a four in-wheel motor drive electric vehicle using adaptive sliding mode control[J]. Proceedings of the Institution of Mechanical Engineers, Part K: Journal of Multi-Body Dynamics, 2019,233(3):549-567. |
| [9] | 车竞, 和争春. 舰载机弹射起飞的动力学建模与相关问题研究[J]. 飞行力学, 2014,32(6):485-488. |
| CHE Jing, HE Zhengchun. Research on dynamic modeling and correlative problems of catapult launch for carrier-based airplane[J]. Flight Dynamics, 2014,32(6):485-488. | |
| [10] | 胡伟, 傅军. 用于舰艇运动条件下姿态测量补偿的坐标变换算法[J]. 舰船电子工程, 2018,38(2):39-41. |
| HU Wei, FU Jun. Research on algorithm of coordinate transformation using for attitude determination compensation under dynamic circumstances[J]. Ship Electronic Engineering, 2018,38(2):39-41. | |
| [11] | RAO S S. Mechanical vibrations[M]. 5th ed. London, England: Pearson Education, Inc., 2011: 494-503. |
| [12] | 刘金琨. 滑模变结构控制MATLAB仿真[M].第3版. 北京: 清华大学出版社, 2015: 22-44. |
| LIU Jinkun. Sliding mode control design and MATLAB simulation[M]. 3rd ed. Beijing: Tsinghua University Press, 2015: 22-44. | |
| [13] | 何永勃, 夏文卿, 董玉珊. 基于模糊自适应算法的异步电机矢量控制系统[J]. 中国民航大学学报, 2017,35(1):47-51. |
| HE Yongbo, XIA Wenqing, DONG Yushan. Asynchronous motor vector control system based on fuzzy adaptive algorithm[J]. Journal of Civil Aviation University of China, 2017,35(1):47-51. | |
| [14] | XIONG L, YU Z P, WANG Y, et al. Vehicle dynamics control of four in-wheel motor drive electric vehicle using gain scheduling based on tyre cornering stiffness estimation[J]. Vehicle System Dynamics, 2012,50(6):831-846. |
| [15] | 刘秋生, 徐延海, 陈启, 等. 4WID轮毂电机式电动汽车横摆稳定性滑模控制研究[J]. 广西大学学报(自然科学版), 2015,40(5):1080-1091. |
| LIU Qiusheng, XU Yanhai, CHEN Qi, et al. Study on sliding mode control for the yaw stability of 4WID wheel motor electric vehicle[J]. Journal of Guangxi University (Natural Science Edition), 2015,40(5):1080-1091. | |
| [16] | 戚基艳, 金嘉琦, 邹姗姗. 舰载机无杆式牵引车纵向动力学分析[J]. 兵器装备工程学报, 2020,41(1):193-199. |
| QI Jiyan, JIN Jiaqi, ZOU Shanshan. Longitudinal dynamics analysis of carrier-based towbarless aircraft tractor[J]. Journal of Ordnance Equipment Engineering, 2020,41(1):193-199. | |
| [17] | 白冰. 全挂汽车列车横向操纵稳定性研究[D]. 长春: 吉林大学, 2007. |
| BAI Bing. Study on lateral controllability and stability of tractor trailer[D]. Changchun: Jilin University, 2007. | |
| [18] | HAYHOE G F. Braking performance of towbarless towing vehicles during maintenance tows [C]//First Congress of Transportation and Development Institute. Chicago, Illinois, USA: TDI, 2011: 310-319. |
| [19] | 李福海. 飞机地面牵引移动与停放安全技术研究[D]. 南京: 南京航空航天大学, 2016. |
| LI Fuhai. Research on aircraft’s towing and parking safety technology[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2016. | |
| [20] | 洪伟宏. 国外航母甲板防滑涂料技术现状及发展趋势[J]. 舰船科学技术, 2015,37(12):166-169. |
| HONG Weihong. Situation and development trend of foreign aircraft carrier deck anti-slip coating technology[J]. Ship Science and Technology, 2015,37(12):166-169. | |
| [21] | 胡孟权, 白双刚, 陈怡然. 舰载机弹射起飞六自由度动力学建模与仿真[J]. 飞行力学, 2013,31(2):97-100. |
| HU Mengquan, BAI Shuanggang, CHEN Yiran. Modeling and simulation for carrier-based aircraft catapult launch with six degrees of freedom[J]. Flight Dynamics, 2013,31(2):97-100. | |
| [22] | 朱梦臣. 大型舰船甲板车行驶动力学研究[D]. 南京: 南京理工大学, 2013. |
| ZHU Mengchen. Research on driving dynamics of vehicle on the ship`s deck[D]. Nanjing: Nanjing University of Science and Technology, 2013. | |
| [23] | 桑德一, 赵建军, 杨利斌. 航母运动对着舰引导雷达精度的影响[J]. 中国舰船研究, 2014,9(6):8-13. |
| SANG Deyi, ZHAO Jianjun, YANG Libin. The impact on landing guidance radar precision caused by the movement of aircraft carriers[J]. Chinese Journal of Ship Research, 2014,9(6):8-13. |
| [1] | YAO Maohong, CHEN Tielin, FAN Rong, YANG Zili, SHI Ye. Slope Stability Considering the Effects of Air Pressure and Seepage Under Heavy Rainfall Conditions [J]. Journal of Shanghai Jiao Tong University, 2022, 56(6): 739-745. |
| [2] | CHEN Yihua1 (陈熠画), CHEN Xinquan1∗ (陈新权), YANG Qi1,2 (杨 启), OUYANG Yiping1 (欧阳义平). Dynamic Stability Analysis of Backhoe Dredger Based on Time Domain Method [J]. J Shanghai Jiaotong Univ Sci, 2022, 27(3): 339-345. |
| [3] | BI Anyuana (毕安元), FENG Zhengpinga,b∗ (冯正平), ZHU Yuchena (朱昱琛), DENG Xua (邓 旭). Two-Stage Scheme for Disturbance Rejection Hovering Control of Underwater Vehicles [J]. J Shanghai Jiaotong Univ Sci, 2022, 27(3): 375-382. |
| [4] | WAN Hui, QI Xiaohui, LI Jie. Linear Matrix Inequality Based Stability Analysis of Linear/Nonlinear Switching Active Disturbance Rejection Control System [J]. Journal of Shanghai Jiao Tong University, 2022, 56(11): 1491-1501. |
| [5] | WANGHuifeng, ZHANGQingying, JIANGLiqun. Research and Application of Towing Scheme Before and After Integration of Semi-Submersible Platforms [J]. Ocean Engineering Equipment and Technology, 2022, 9(1): 8-14. |
| [6] | ZHANGKai, ZHANGShousen, QIDelu. Design and Research of the Ballastand De-Ballast Systemof Semi-Submersible Production and Storage Platforms [J]. Ocean Engineering Equipment and Technology, 2022, 9(1): 15-20. |
| [7] | WU Xin, SUN Hui, WANG Jin. Electronic Management Technology and Application of Structured Intelligent Stability Limit [J]. Journal of Shanghai Jiao Tong University, 2021, 55(S2): 31-36. |
| [8] | XIONG Guojun, WANG Jianhua, CHEN Jinjian. Stability Analysis and Support Suggestions of Pile Hole Based on Mud Pressure Balance Earth Pressure [J]. Journal of Shanghai Jiao Tong University, 2021, 55(9): 1108-1115. |
| [9] | GUO Zhiyuan, YU Peixiang, OUYANG Hua. Shear Layer Instability of Flow Around a Circular Cylinder Based on Large Eddy Simulation [J]. Journal of Shanghai Jiao Tong University, 2021, 55(8): 924-933. |
| [10] | WANG Weiyang (王维旸), CUI Ke (崔 科), GU Lizhong(顾立忠), LU¨ Xinjun (吕新军). Cooperative Adaptive Cruise Control Using Delay-Based Spacing Policy: A Robust Adaptive Non-Singular Terminal Sliding Mode Approach [J]. J Shanghai Jiaotong Univ Sci, 2021, 26(5): 634-646. |
| [11] | WANG Yu, YU Yuefeng, ZHU Xiaolei, ZHANG Zhongxiao. Gas-Fired Flame Stability Based on Optical Flow Method and Deep Learning [J]. Journal of Shanghai Jiao Tong University, 2021, 55(4): 462-470. |
| [12] | YAN Xiongwei, DU Bo, LI Shaolong, ZHANG Luhua, LI Keyong. Impact of Thrust Variation on Dynamic Stability of Spinning Missiles [J]. Air & Space Defense, 2021, 4(4): 57-60. |
| [13] | WANG Jiaqi, GUO Jianguo, GUO Zongyi, ZHAO Bin. Sliding Mode Control of High Mach Number Aircraft Based on Disturbance Observer [J]. Air & Space Defense, 2021, 4(3): 85-91. |
| [14] | CAO Yu, HAN Zhaolong, ZHOU Dai, LEI Hang. Aerodynamic Performance of Counter-Rotating Vertical Axis Wind Turbine [J]. Journal of Shanghai Jiao Tong University, 2021, 55(2): 141-148. |
| [15] | LI Shaoyong (李绍勇), WANG Duo (王铎), HAN Xilian (韩喜莲), CHENG Kang (程康), ZHAO Chunrun (赵春润). Auto-Tuning Parameters of Fractional PID Controller Design for Air-Conditioning Fan Coil Unit [J]. J Shanghai Jiaotong Univ Sci, 2021, 26(2): 186-192. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||