上海交通大学学报 ›› 2020, Vol. 54 ›› Issue (8): 849-855.doi: 10.16183/j.cnki.jsjtu.2019.084
夏国清, 刘彩云, 陈兴华( )
)
收稿日期:2019-03-23
出版日期:2020-08-28
发布日期:2020-08-18
通讯作者:
陈兴华
E-mail:chenxinghua@hrbeu.edu.cn
作者简介:夏国清(1962-),男,黑龙江省哈尔滨市人,教授,博士生导师,主要从事船舶运动控制研究
基金资助:
XIA Guoqing, LIU Caiyun, CHEN Xinghua()
Received:2019-03-23
Online:2020-08-28
Published:2020-08-18
Contact:
CHEN Xinghua
E-mail:chenxinghua@hrbeu.edu.cn
摘要:
针对船舶动力定位辅助锚泊定位(DPM)系统中速度不可测和外部扰动不确定的问题,基于传统的状态观测器的设计了一种有限时间状态观测器(FTSO),所提观测器可以同时对船舶速度和外部扰动进行估计.在船舶的建模过程中考虑了系统中的未建模动态项,并根据建立的数学模型给出了所提观测器的数学表达式.利用矩阵不等式、齐次理论和Lyapunov稳定性理论等证明了该有限时间观测器是半全局有限时间稳定的.对所提观测器进行了仿真验证,并与传统的状态观测器进行了对比实验,仿真结果表明所提观测器具有更快的收敛速度和更好的抗干扰性.
中图分类号:
夏国清, 刘彩云, 陈兴华. 动力定位辅助锚泊定位船有限时间观测器设计[J]. 上海交通大学学报, 2020, 54(8): 849-855.
XIA Guoqing, LIU Caiyun, CHEN Xinghua. Finite-Time Observer Design for Dynamic Positioning Assisted Mooring Positioning Ship[J]. Journal of Shanghai Jiaotong University, 2020, 54(8): 849-855.
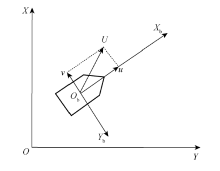
图1
坐标系定义
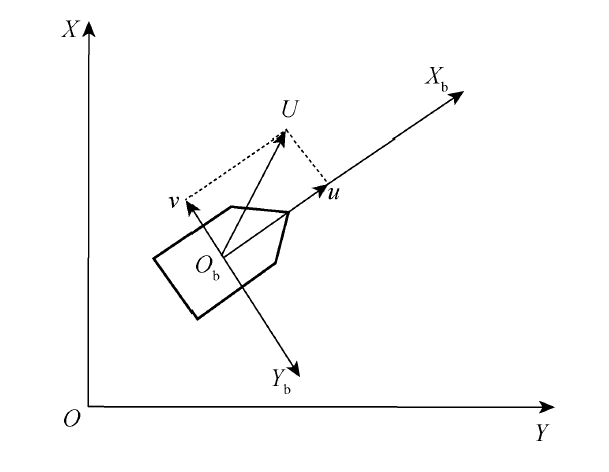
图2
‖e1‖和‖e2‖的响应曲线
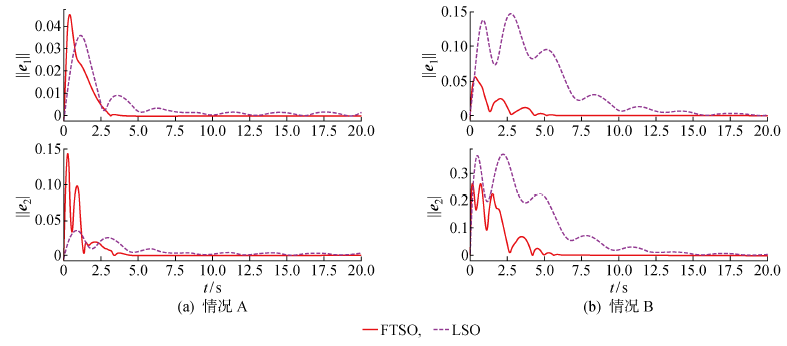

图3
北向位置、东向位置和艏向的估计误差

图4
纵荡速度、横荡速度和回转率的估计误差

| [1] | REN Z, SKJETNE R, HASSANI V . Supervisory control of line breakage for thruster-assisted position mooring system[J]. IFAC-PapersOnLine, 2015,48(16):235-240. |
| [2] | 雷正玲, 郭晨, 刘正江 . 船舶锚泊辅助动力定位的抗扰控制[J]. 哈尔滨工程大学学报, 2015,1(36):24-28. |
| LEI Zhengling, GUO Chen, LIU Zhengjiang . Disturbance rejection control over ship thruster-assisted mooring positioning[J]. Journal of Harbin Engineering University, 2015,1(36):24-28. | |
| [3] |
JAYASIRI A, NANDAN A, IMTIAZ S , et al. Dynamic positioning of vessels using a UKF-based observer and an NMPC-based controller[J]. IEEE Transactions on Automation Science and Engineering, 2017,14(4):1778-1785.
doi: 10.1109/TASE.2017.2698923 URL |
| [4] | DING H, FENG H, XU H . An adaptive unscented Kalman filter for tracking sudden environmental forces changes in dynamic positioning system[J]. Journal of Ship Mechanics, 2017,21(6):711-721. |
| [5] | 苏义鑫, 赵俊, 张华军 . 带有UKBF的船舶动力定位预测控制器设计[J]. 西南交通大学学报, 2018,53(3):589-594. |
| SU Yixin, ZHAO Jun, ZHANG Huajun . Predictive controller with UKBF for marine dynamic positioning system[J]. Journal of Southwest Jiaotong University, 2018,53(3):589-594. | |
| [6] |
WANG Y, TUO Y, YANG S X , et al. Reliability-based robust dynamic positioning for a turret-moored floating production storage and offloading vessel with unknown time-varying disturbances and input saturation.[J]. Isa Transactions, 2018,78:66-79.
doi: 10.1016/j.isatra.2017.12.023 URL pmid: 29370899 |
| [7] | 黄成, 王岩 . 交会对接模拟系统姿态跟踪有限时间抗干扰控制[J]. 控制与决策, 2017,32(7):1189-1195. |
| HUANG Cheng, WANG Yan . Finite-time active disturbance rejection attitude tracking control for rendezvous and docking simulator[J]. Control and Decision, 2017,32(7):1189-1195. | |
| [8] |
XIA G, SUN C, ZHAO B , et al. Cooperative control of multiple dynamic positioning vessels with input saturation based on finite-time disturbance observer[J]. International Journal of Control, Automation and Systems, 2019,17(2):370-379.
doi: 10.1007/s12555-018-0383-4 URL |
| [9] |
SU Y, ZHENG C . Robust finite-time output feedback control of perturbed double integrator[J]. Automatica, 2015,60:86-91.
doi: 10.1016/j.automatica.2015.07.008 URL |
| [10] |
ZOU A M, DE RUITER A H J, KUMAR K D. Distributed finite-time velocity-free attitude coordination control for spacecraft formations[J]. Automatica, 2016,67:46-53.
doi: 10.1016/j.automatica.2015.12.029 URL |
| [11] |
KUMAR P R, BEHERA A K, BANDYOPADHYAY B . Robust finite-time tracking of stewart platform: A super-twisting like observer-based forward kinematics solution[J]. IEEE Transactions on Industrial Electronics, 2017,64(5):3776-3785.
doi: 10.1109/TIE.2017.2652341 URL |
| [12] | HARDY G, LITTLEWOOD J, POLYA G. Inequalities[M]. Cambridge, U.K.: Cambridge Univ. Press, 1952. |
| [13] | BHAT S P, BERNSTEIN D S . Geometric homogeneity with applications to finite-time stability[J]. Mathematics of Control Signals & Systems, 2005,17(2):101-127. |
| [14] |
ZOU A . Finite-time output feedback attitude tracking control for rigid spacecraft[J]. IEEE Transactions on Control Systems Technology, 2014,22(1):338-345.
doi: 10.1109/TCST.2013.2246836 URL |
| [15] | 付明玉, 张爱华, 徐金龙 . 船舶轨迹跟踪半全局一致指数稳定观测控制器[J]. 控制与决策, 2013,28(6):920-924. |
| FU Mingyu, ZHANG Aihua, XU Jinlong . Semi-global uniform exponential stable observer-controller for trajectory tracking of ships[J]. Control and Decision, 2013,28(6):920-924. | |
| [16] |
FU M, YU L . Finite-time extended state observer-based distributed formation control for marine surface vehicles with input saturation and disturbances[J]. Ocean Engineering, 2018,159:219-227.
doi: 10.1016/j.oceaneng.2018.04.016 URL |
| [1] | . 类间隙滞后非线性系统复合双通道干扰估计自适应控制器设计[J]. J Shanghai Jiaotong Univ Sci, 2026, 31(1): 106-116. |
| [2] | 李冬辉,郑宏宇,姚乐乐. 三相并网逆变器的混杂自动机模型分析[J]. 上海交通大学学报(自然版), 2019, 53(3): 348-354. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||