上海交通大学学报 ›› 2024, Vol. 58 ›› Issue (4): 468-480.doi: 10.16183/j.cnki.jsjtu.2022.314
郝亮, 黄颖浩, 姚莉秀, 蔡云泽( )
)
收稿日期:2022-08-15
修回日期:2022-09-28
接受日期:2022-10-17
出版日期:2024-04-28
发布日期:2024-04-30
通讯作者:
蔡云泽,研究员,博士生导师;E-mail:yzcai@sjtu.edu.cn.
作者简介:郝 亮(1999-),硕士生,从事目标跟踪与协同定位研究.
基金资助:
HAO Liang, HUANG Yinghao, YAO Lixiu, CAI Yunze()
Received:2022-08-15
Revised:2022-09-28
Accepted:2022-10-17
Online:2024-04-28
Published:2024-04-30
摘要:
针对变结构多模型算法在机动目标跟踪中对目标机动不确定性、量测不确定性自适应能力不足的问题,提出一种基于模糊推理的机动自适应目标跟踪算法.设计一种基于模糊推理的双级机动判别模型,利用模型概率信息和主模型滤波残差加权范数进行主模型可信度和机动判别推理;并将双级机动判别引入基于可能模型集的期望模式扩增方法(EMA-LMS)框架,提出一种模糊推理EMA-LMS算法,实现对模型集自适应的参数和策略的在线调节,从而生成更加接近目标真实运动模式的期望模型,并更好地对模型进行取舍.仿真结果表明,本文算法能够有效增强算法对目标机动和量测不确定的自适应性,提高跟踪精度.
中图分类号:
郝亮, 黄颖浩, 姚莉秀, 蔡云泽. 一类基于模糊推理的具有机动自适应的目标跟踪算法[J]. 上海交通大学学报, 2024, 58(4): 468-480.
HAO Liang, HUANG Yinghao, YAO Lixiu, CAI Yunze. An Adaptive Maneuvering Target Tracking Algorithm Based on Fuzzy Inference[J]. Journal of Shanghai Jiao Tong University, 2024, 58(4): 468-480.
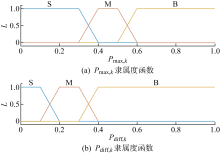
图1
主模型可信度推理输入变量隶属度函数

表1
主模型可信度推理规则
| n | Pmax,k | Pdiff,k | |
|---|---|---|---|
| 1 | S | S | 0.3Pmax,k |
| 2 | S | M | 0.3Pmax,k |
| 3 | S | B | 0.5Pmax,k+0.2Pdiff,k+0.3 |
| 4 | M | S | 0.5Pmax,k+0.2Pdiff,k+0.3 |
| 5 | M | M | 0.5Pmax,k+0.2Pdiff,k+0.3 |
| 6 | M | B | 0.5Pmax,k+0.2Pdiff,k+0.3 |
| 7 | B | S | 0.5Pmax,k+0.2Pdiff,k+0.3 |
| 8 | B | M | 0.3Pmax,k+0.5 |
| 9 | B | B | 0.3Pmax,k+0.5 |
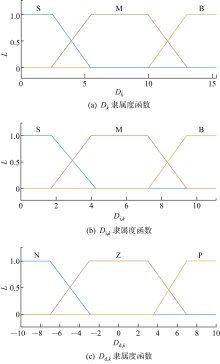
图2
机动判别推理输入变量隶属度函数
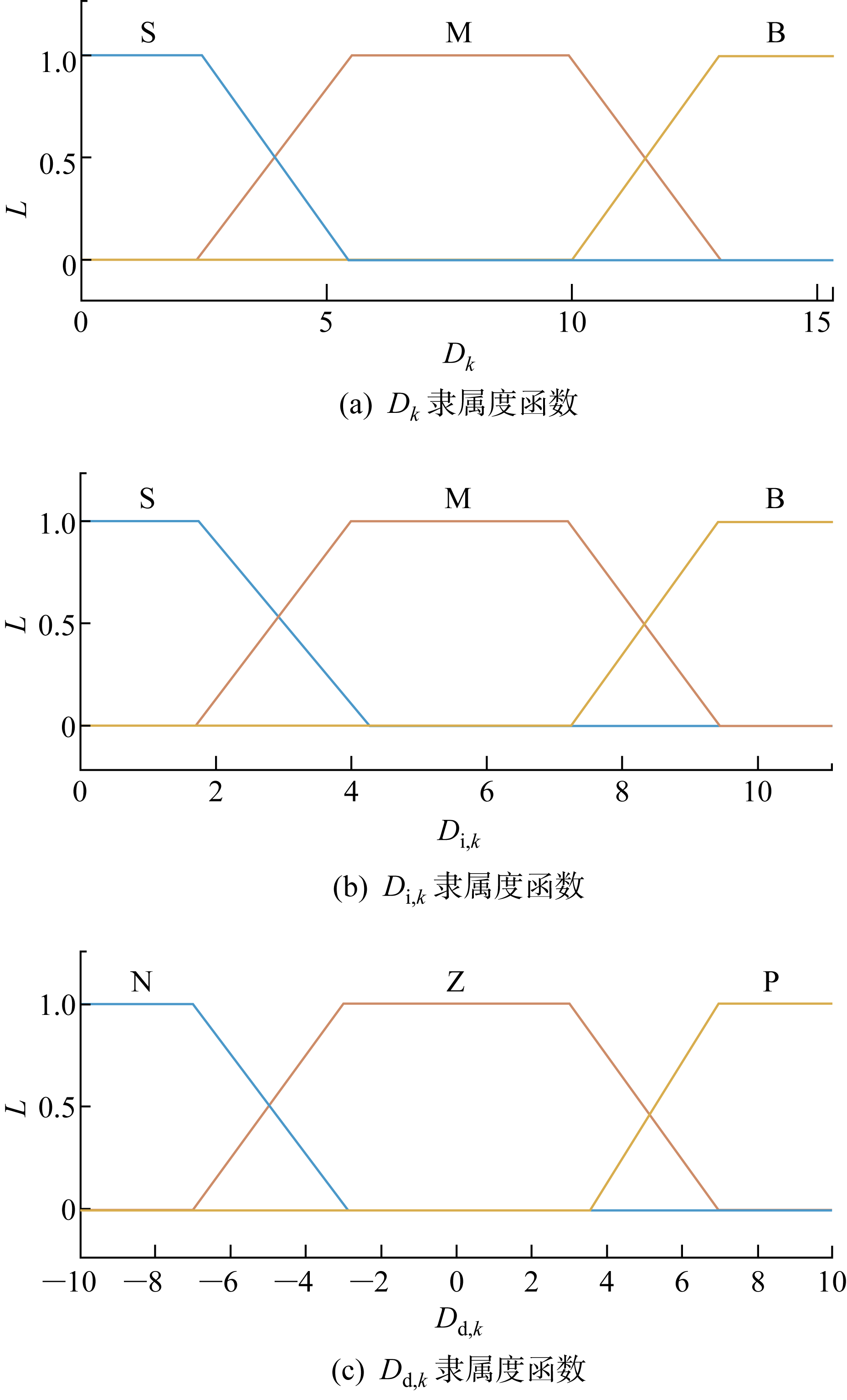

图3
模糊推理EMA-LMS算法流程图
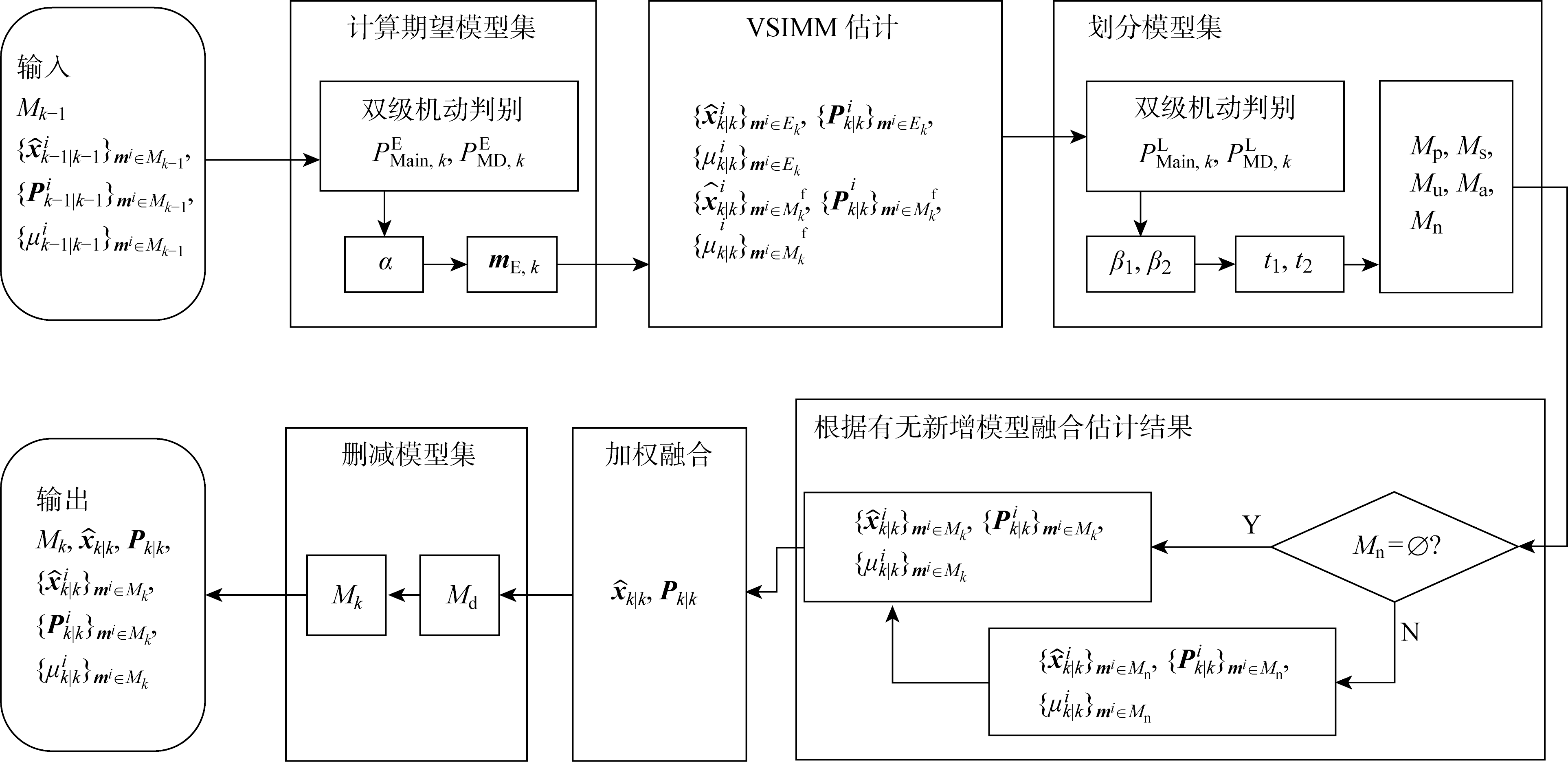
表2
两种场景下目标加速度变化
| k/s | 场景1 | 场景2 | |||
|---|---|---|---|---|---|
| ax/(m·s-2) | ay/(m·s-2) | ax/(m·s-2) | ay/(m·s-2) | ||
| 1~50 | 0 | 0 | 0 | 0 | |
| 51~100 | 60 | 60 | 30 | -20 | |
| 101~150 | 100 | 0 | 20 | -30 | |
| 151~200 | -30 | 30 | -20 | -20 | |
| 201~250 | -30 | -45 | -30 | 15 | |
| 251~300 | 25 | 40 | -45 | 30 | |
| 301~350 | 35 | -50 | -60 | 60 | |
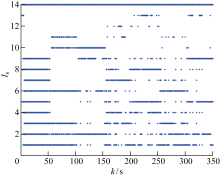
图4
模糊推理EMA-LMS算法模型选择结果(场景1)
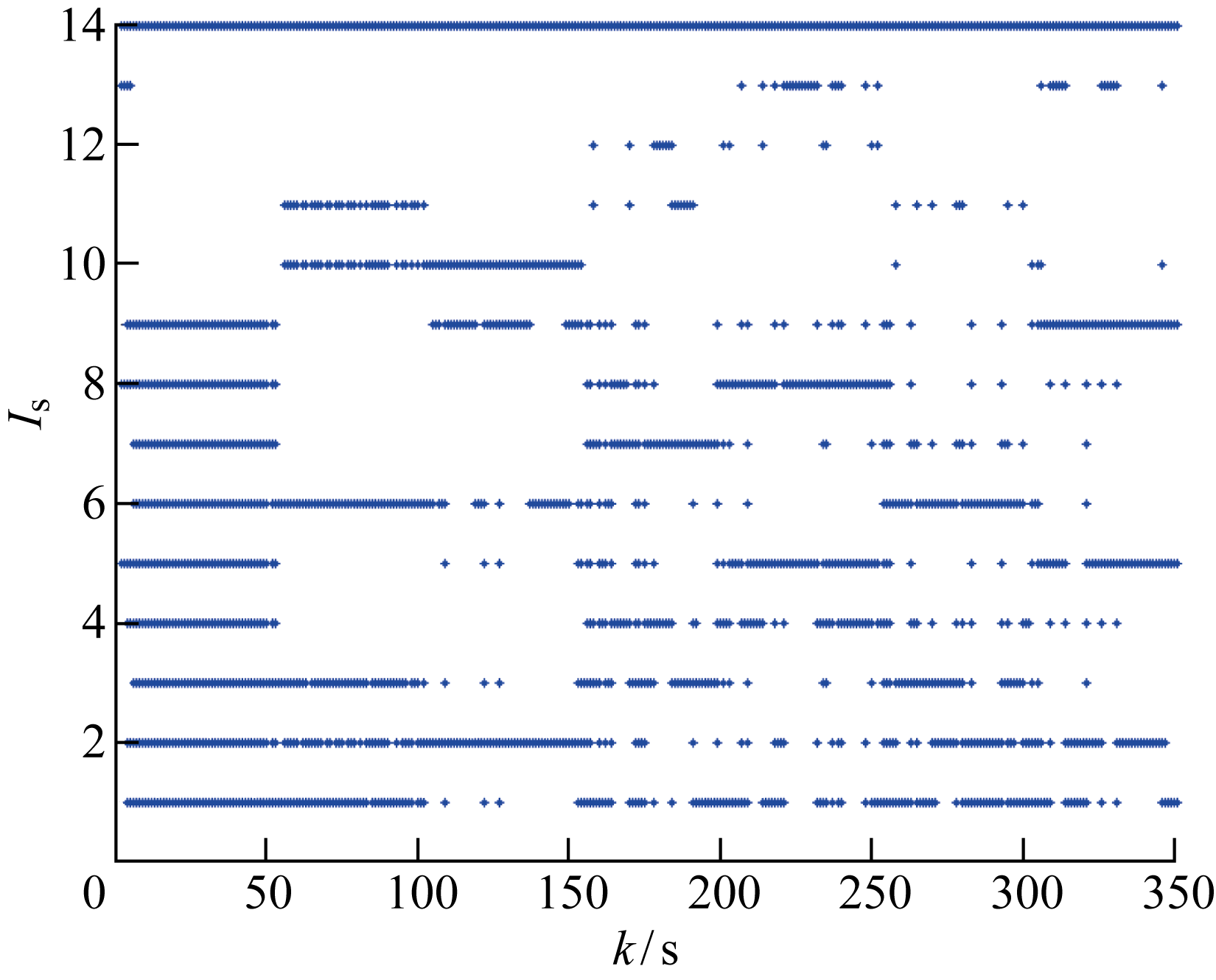
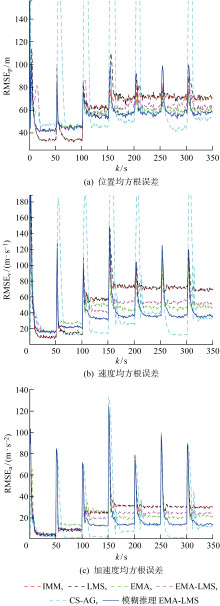
图5
各算法跟踪指标对比(场景1)
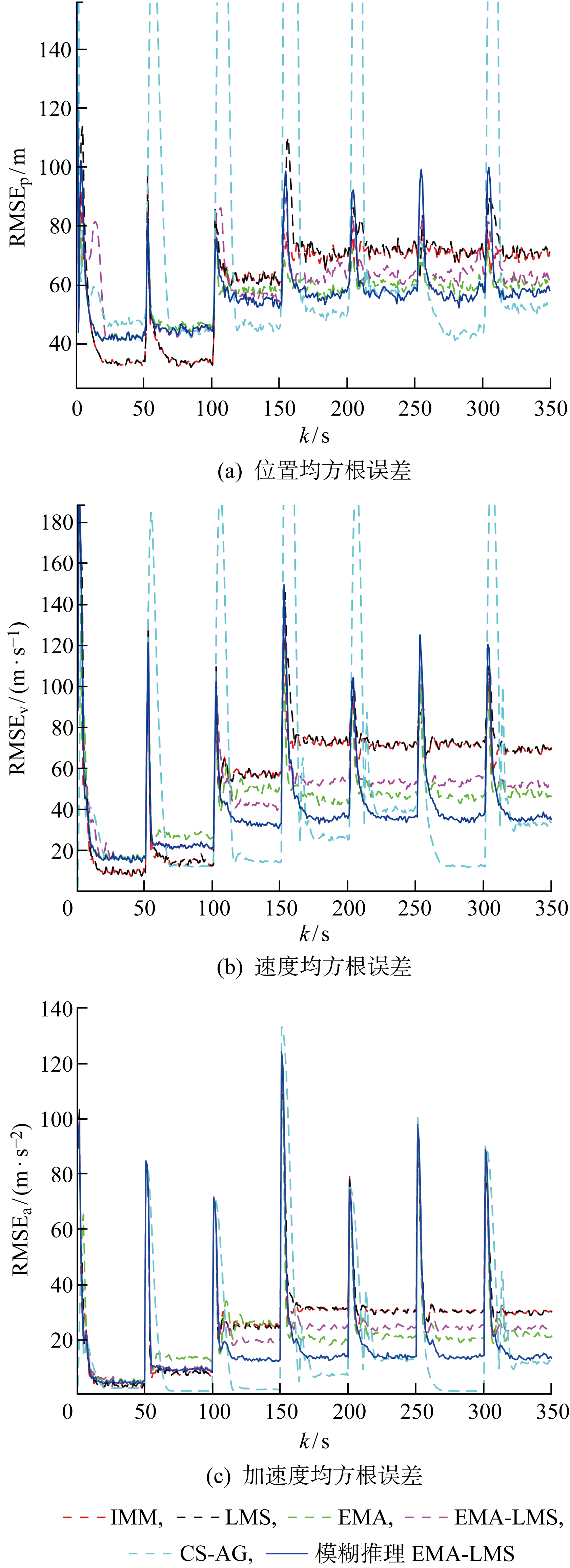
表3
各算法跟踪指标平均值(场景1)
| 算法 | 匹配阶段 | 不匹配阶段 | |||||
|---|---|---|---|---|---|---|---|
| ARMSEp/m | ARMSEv/(m·s-1) | ARMSEa/(m·s-2) | ARMSEp/m | ARMSEv/(m·s-1) | ARMSEa/(m·s-2) | ||
| IMM | 40.46 | 22.10 | 11.71 | 69.00 | 69.63 | 32.69 | |
| LMS | 41.55 | 23.44 | 12.01 | 71.20 | 71.53 | 33.11 | |
| EMA | 48.38 | 31.18 | 15.78 | 60.16 | 50.49 | 25.97 | |
| EMA-LMS | 51.36 | 29.75 | 13.24 | 64.09 | 55.39 | 27.78 | |
| CS-AG | 63.54 | 33.77 | 10.13 | 85.08 | 55.91 | 19.68 | |
| 模糊推理 EMA-LMS | 48.24 | 28.59 | 12.73 | 59.58 | 43.20 | 20.05 | |
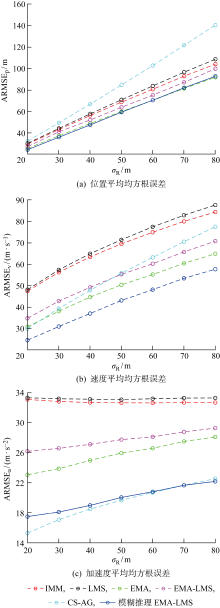
图6
不同量测噪声下各算法跟踪指标对比(场景1)


图7
模糊推理EMA-LMS模型选择结果(场景2)
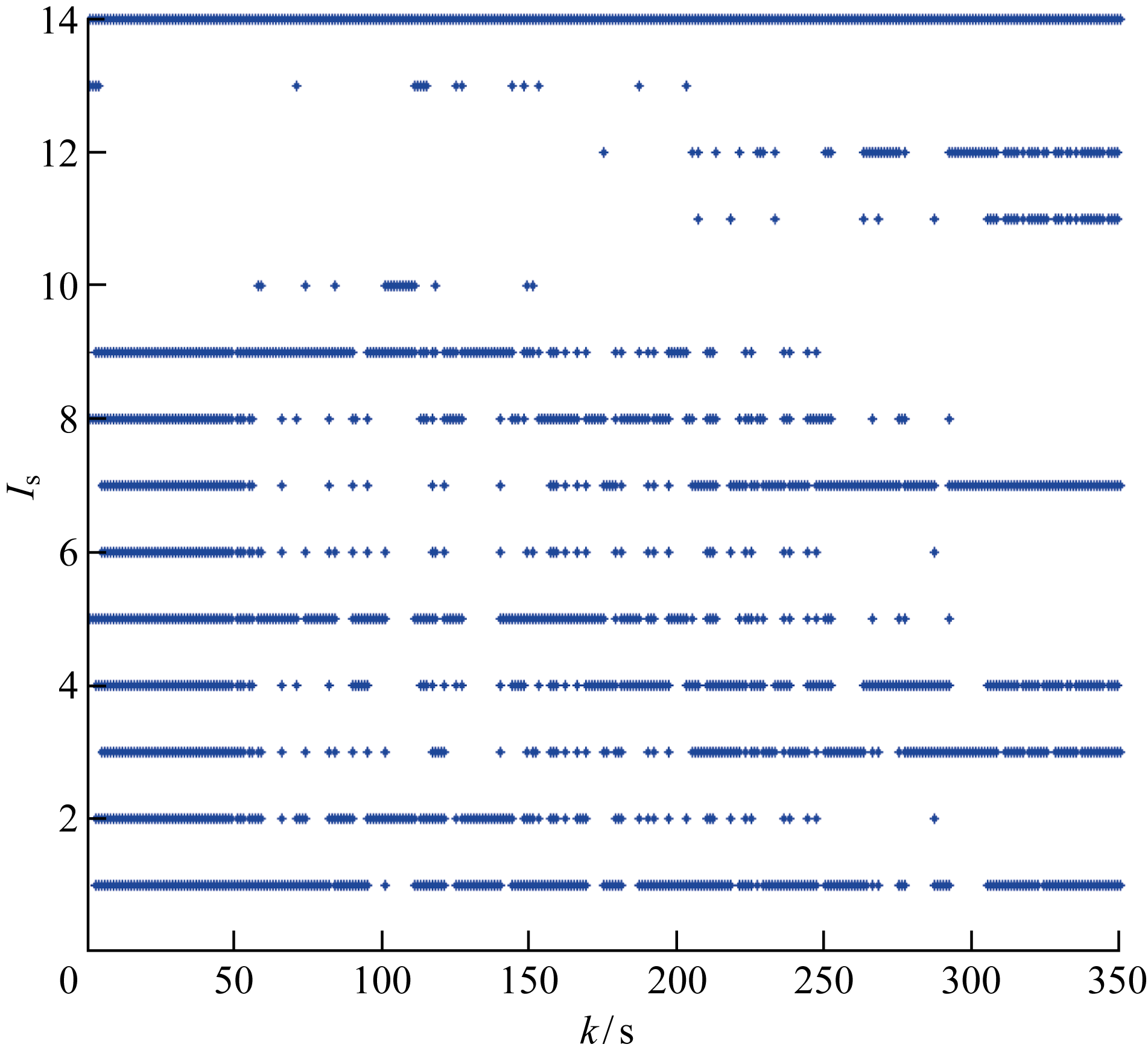
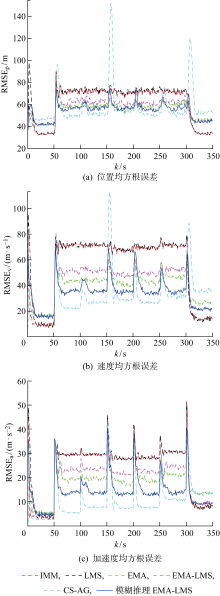
图8
各算法跟踪指标对比(场景2)

表4
各算法跟踪指标平均值(场景2)
| 算法 | 匹配阶段 | 不匹配阶段 | |||||
|---|---|---|---|---|---|---|---|
| ARMSEp/m | ARMSEv/(m·s-1) | ARMSEa(m·s-2) | ARMSEp/m | ARMSEv/(m·s-1) | ARMSEa/(m·s-2) | ||
| IMM | 37.84 | 16.85 | 8.42 | 71.25 | 69.90 | 29.60 | |
| LMS | 40.29 | 20.27 | 9.96 | 72.08 | 70.46 | 29.64 | |
| EMA | 46.09 | 25.37 | 11.55 | 58.91 | 45.08 | 20.55 | |
| EMA-LMS | 45.93 | 24.01 | 10.08 | 61.95 | 51.26 | 23.78 | |
| CS-AG | 55.42 | 30.71 | 9.82 | 56.95 | 32.87 | 10.40 | |
| 模糊推理 EMA-LMS | 46.34 | 24.09 | 9.81 | 57.67 | 38.53 | 15.69 | |

图9
不同量测噪声下各算法跟踪指标对比(场景2)

| [1] |
陈晓, 李亚安, 李余兴, 等. 基于距离加权的概率数据关联机动目标跟踪算法[J]. 上海交通大学学报, 2018, 52(4): 474-479.
doi: 10.16183/j.cnki.jsjtu.2018.04.013 |
| CHEN Xiao, LI Ya’an, LI Yuxing, et al. Maneuvering target tracking algorithm based on weighted distance of probability data association[J]. Journal of Shanghai Jiao Tong University, 2018, 52(4): 474-479. | |
| [2] |
LI X R, ZHANG Y. Multiple-model estimation with variable structure. V. Likely-model set algorithm[J]. IEEE Transactions on Aerospace and Electronic Systems, 2000, 36(2): 448-466.
doi: 10.1109/7.845222 URL |
| [3] |
LI X R, ZHI X, ZHANG Y. Multiple-model estimation with variable structure. III. Model-group switching algorithm[J]. IEEE Transactions on Aerospace and Electronic Systems, 1999, 35(1): 225-241.
doi: 10.1109/7.745694 URL |
| [4] |
LI X R, JILKOV V P, RU J. Multiple-model estimation with variable structure—Part VI: Expected-mode augmentation[J]. IEEE Transactions on Aerospace and Electronic Systems, 2005, 41(3): 853-867.
doi: 10.1109/TAES.2005.1541435 URL |
| [5] |
JILKOV V P, ANGELOVA D S, SEMERDJIEV T Z A. Design and comparison of mode-set adaptive IMM algorithms for maneuvering target tracking[J]. IEEE Transactions on Aerospace and Electronic Systems, 1999, 35(1): 343-350.
doi: 10.1109/7.745704 URL |
| [6] | 王昱淇, 卢宙, 蔡云泽. 基于一致性的分布式变结构多模型方法[J]. 自动化学报, 2021, 47(7): 1548-1557. |
| WANG Yuqi, LU Zhou, CAI Yunze. Consensus-based distributed variable structure multiple model[J]. Acta Automatica Sinica, 2021, 47(7): 1548-1557. | |
| [7] | 郭志, 董春云, 蔡远利, 等. 时变转移概率IMM-SRCKF机动目标跟踪算法[J]. 系统工程与电子技术, 2015, 37(1): 24-30. |
|
GUO Zhi, DONG Chunyun, CAI Yuanli, et al. Time-varying transition probability based IMM-SRCKF algorithm for maneuvering target tracking[J]. Systems Engineering and Electronics, 2015, 37(1): 24-30.
doi: 10.3969/j.issn.1001-506X.2015.01.05 |
|
| [8] | 游航航, 韩其松, 余敏建, 等. 基于AIGWO-IMMUKF 的目标跟踪算法[J]. 北京航空航天大学学报, 2020, 46(10): 1826-1833. |
| YOU Hanghang, HAN Qisong, YU Minjian, et al. Target tracking algorithm based on AIGWO-IMMUKF[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(10): 1826-1833. | |
| [9] |
XIE G, SUN L, WEN T, et al. Adaptive transition probability matrix-based parallel IMM algorithm[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2019, 51(5): 2980-2989.
doi: 10.1109/TSMC.2019.2922305 URL |
| [10] | 潘媚媚. 高速高机动目标自适应跟踪算法研究[D]. 西安: 西安电子科技大学, 2019. |
| PAN Meimei. Research on adaptive algorithms for highly maneuvering target tracking[D]. Xi’an: Xi-dian University, 2019. | |
| [11] | EUN Y, JEON D. Fuzzy inference-based dynamic determination of IMM mode transition probability for multi-radar tracking[C]// Proceedings of the 16th International Conference on Information Fusion. Istanbul, Turkey: IEEE, 2013: 1520-1525. |
| [12] | LI L Q, ZHAO D, LUO C D. A novel interacting TS fuzzy multiple model by using UKF for maneuvering target tracking[C]// 2019 22th International Conference on Information Fusion. Ottawa, Canada: IEEE, 2019: 1-7. |
| [13] | 邵堃, 雷迎科. 基于模糊逻辑和机动检测的AGIMM跟踪算法[J]. 空军工程大学学报(自然科学版), 2020, 21(4): 80-87. |
| SHAO Kun, LEI Yingke. AGIMM tracking algorithm based on fuzzy logic and maneuvering detection[J]. Journal of Air Force Engineering University (Natural Science Edition), 2020, 21(4): 80-87. | |
| [14] |
CHANG C W, TAO C W. A novel approach to implement Takagi-Sugeno fuzzy models[J]. IEEE Transactions on Cybernetics, 2017, 47(9): 2353-2361.
doi: 10.1109/TCYB.2017.2701900 URL |
| [15] | 雷英杰, 路艳丽, 王毅, 等. 模糊逻辑与智能系统[M]. 西安: 西安电子科技大学出版社, 2016. |
| LEI Yingjie, LU Yanli, WANG Yi, et al. Fuzzy logic with intelligent systems[M]. Xi’an: Xidian University Press, 2016. | |
| [16] | 罗晓勇. 无线传感网络中基于交互式多模型目标跟踪算法研究[D]. 重庆: 重庆邮电大学, 2020. |
| LUO Xiaoyong. Research on target tracking algorithm based on interaction multiple model in wireless sensor networks[D]. Chongqing: Chongqing University of Posts and Telecommunications, 2020. | |
| [17] | 傅虹景, 于守江, 吉峰, 等. 基于“当前”统计模型的变结构交互多模型算法[J]. 无线电工程, 2020, 50(4): 318-322. |
| FU Hongjing, YU Shoujiang, JI Feng, et al. Variable structure interactive multiple model algorithm based on current statistical model[J]. Radio Engineering, 2020, 50(4): 318-322. |
| [1] | 张建军,刘卫东,李乐,程瑞锋,郑海峰. 未知环境下水下机械手智能抓取的自适应阻抗控制[J]. 上海交通大学学报(自然版), 2019, 53(3): 341-347. |
| [2] | 陈晓,李亚安,李余兴,蔚婧. 基于距离加权的概率数据关联机动目标跟踪算法[J]. 上海交通大学学报(自然版), 2018, 52(4): 474-479. |
| [3] | 沙建军, 潘尔顺. 基于改进自适应神经模糊推理模型的 回流焊参数设定方法[J]. 上海交通大学学报(自然版), 2011, 45(12): 1741-1746. |
| [4] | 郝燕玲,孟凡彬,王素鑫,孙枫. 一种新的多机动目标跟踪的GMPHD滤波算法[J]. 上海交通大学学报(自然版), 2010, 44(07): 873-0877. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||