上海交通大学学报 ›› 2024, Vol. 58 ›› Issue (11): 1805-1815.doi: 10.16183/j.cnki.jsjtu.2024.221
所属专题: 制导、导航与控制
刘宇, 文利燕( ), 姜斌, 马亚杰, 崔玉康
), 姜斌, 马亚杰, 崔玉康
收稿日期:2024-06-13
修回日期:2024-07-02
接受日期:2024-07-15
出版日期:2024-11-28
发布日期:2024-12-02
通讯作者:
文利燕,副教授,博士生导师;E-mail:作者简介:刘 宇(1999—),硕士生,从事多智能体自适应协同控制研究.
基金资助:
LIU Yu, WEN Liyan(), JIANG Bin, MA Yajie, CUI Yukang
Received:2024-06-13
Revised:2024-07-02
Accepted:2024-07-15
Online:2024-11-28
Published:2024-12-02
摘要:
针对通信拓扑突变的不确定异构多智能体系统,将拓扑突变等效为切换拓扑问题,进而设计一种基于领导者-模型-跟随者匹配的分布式自适应协同控制方法,实现领导者-跟随者输出一致性.首先,提出局部输出跟踪误差概念,将领导者-跟随者输出一致性问题转化为相邻智能体局部输出一致性问题;然后,针对系统参数已知的情况,进行分布式标称协同控制器设计,实现参考模型-领导者匹配和跟随者-参考模型匹配,以保证通信拓扑突变下领导者-跟随者输出一致性;进而,针对系统参数未知的情况,进行分布式自适应协同控制器设计,实现通信拓扑突变下跟随者输出对领导者输出的渐近跟踪.所设计的控制方法不依靠全局信息即可保证所有智能体系统闭环稳定及跟随者对领导者的输出一致性.最后,通过一个仿真案例验证了所设计的控制方案的有效性.
中图分类号:
刘宇, 文利燕, 姜斌, 马亚杰, 崔玉康. 切换拓扑下异构多智能体系统自适应输出一致性[J]. 上海交通大学学报, 2024, 58(11): 1805-1815.
LIU Yu, WEN Liyan, JIANG Bin, MA Yajie, CUI Yukang. Adaptive Output Consensus of Heterogeneous Multi-Agent System with Switching Topology[J]. Journal of Shanghai Jiao Tong University, 2024, 58(11): 1805-1815.
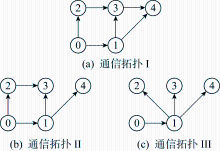
图1
通信链接改变导致的拓扑结构突变
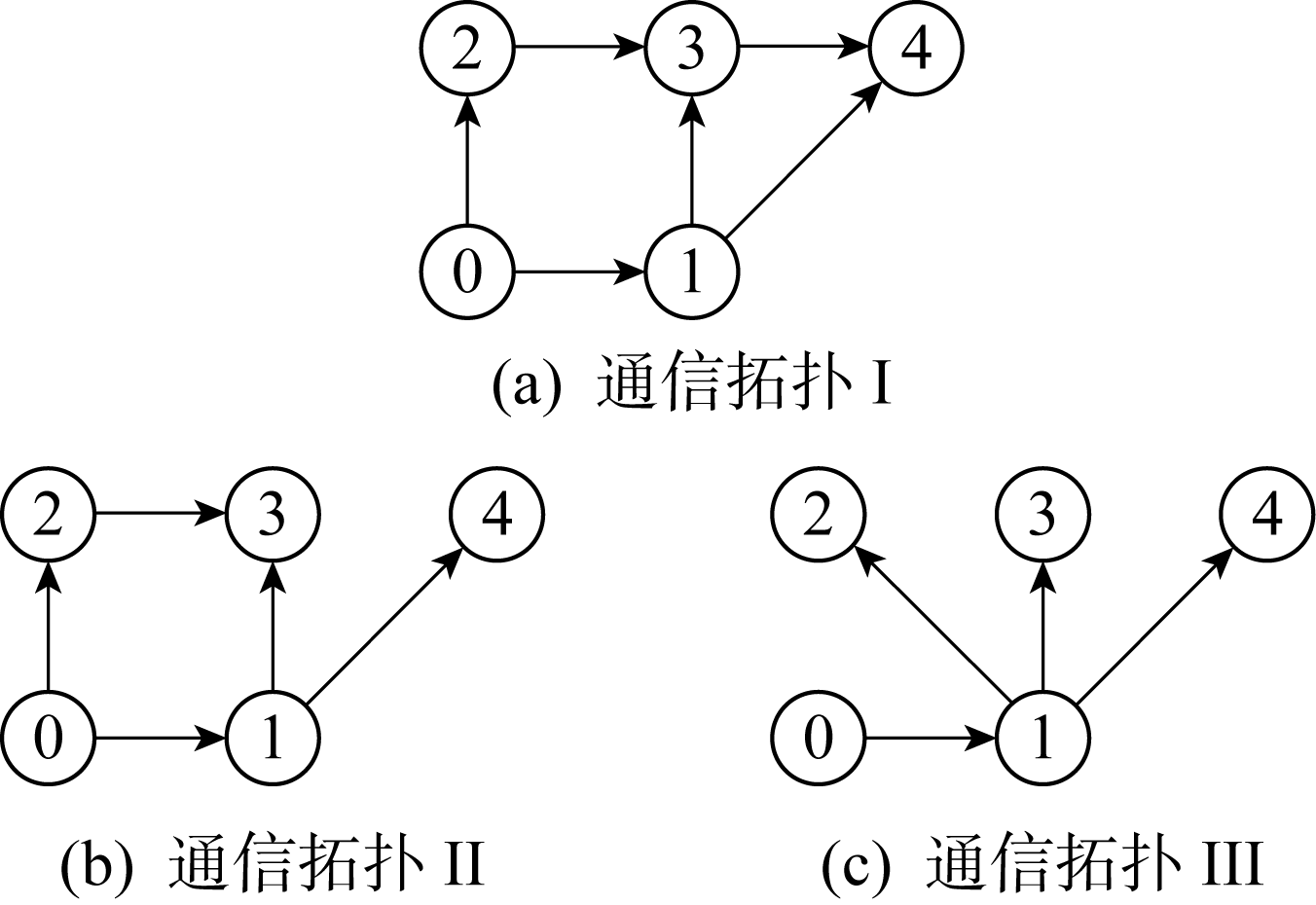
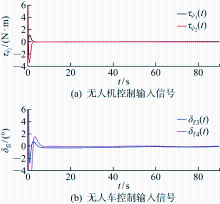
图2
跟随者控制输入信号
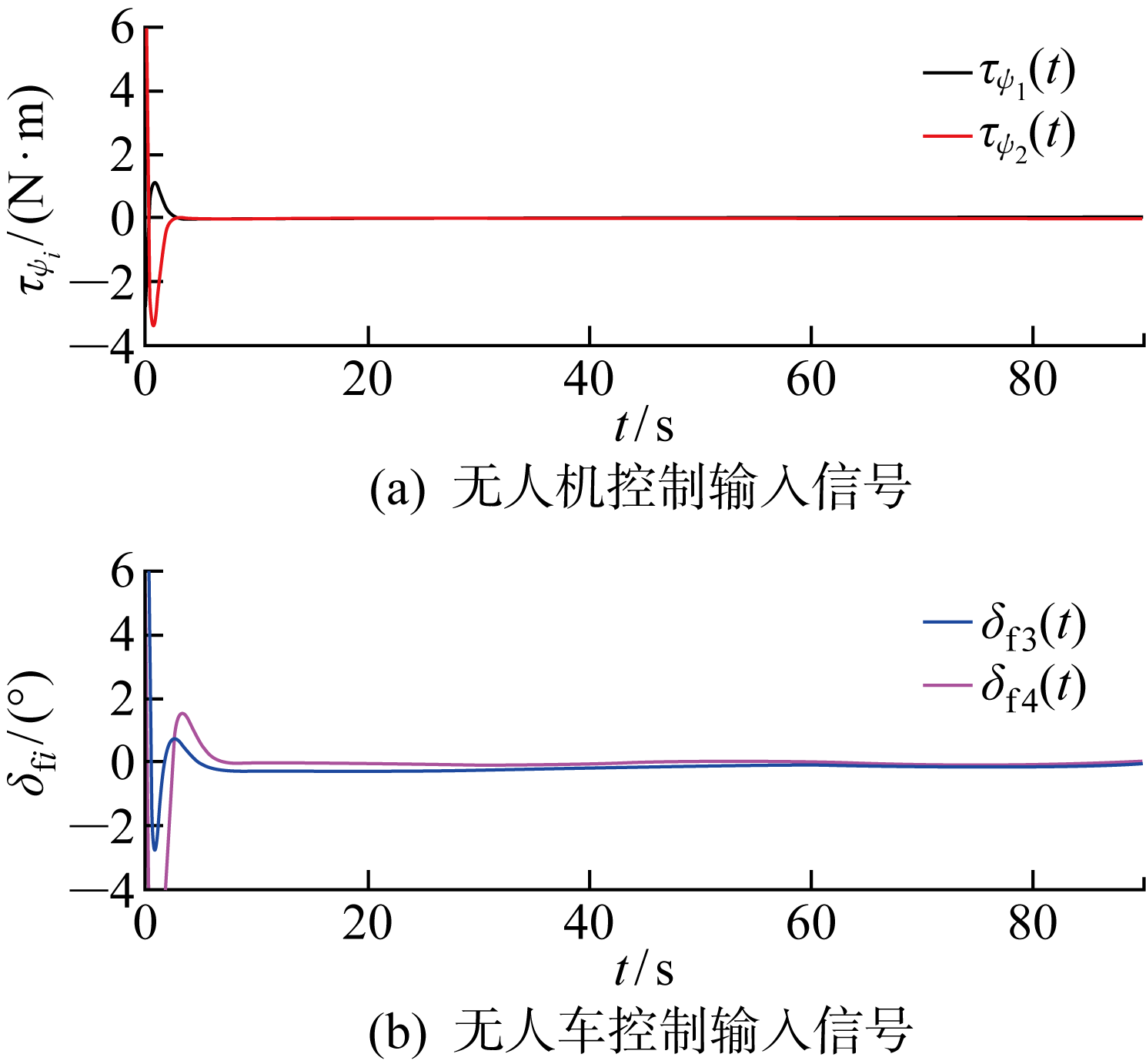
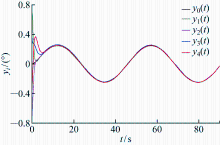
图3
领导者-跟随者系统输出信号
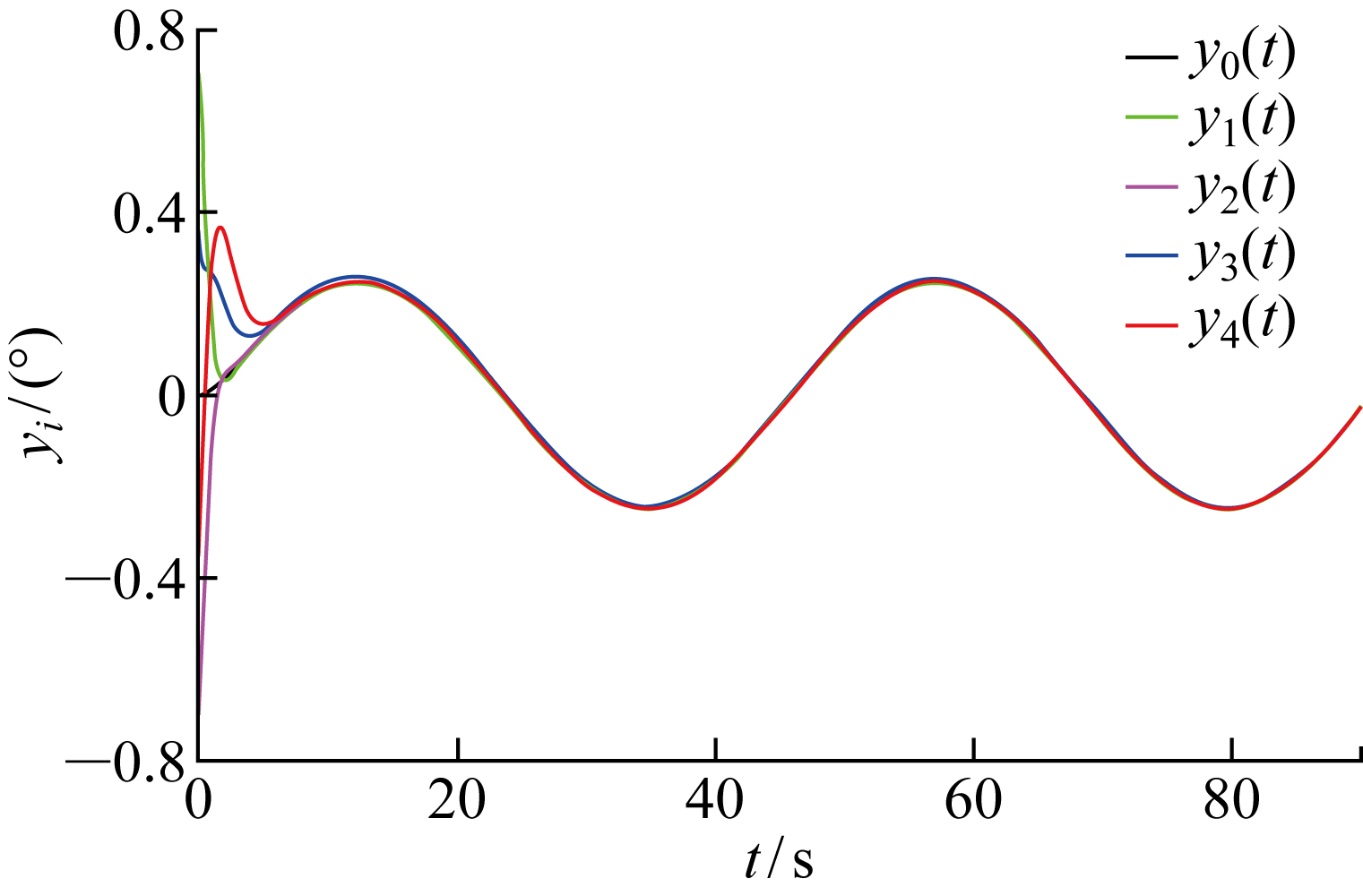
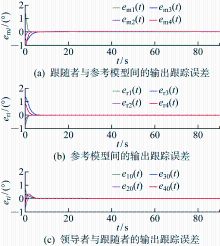
图4
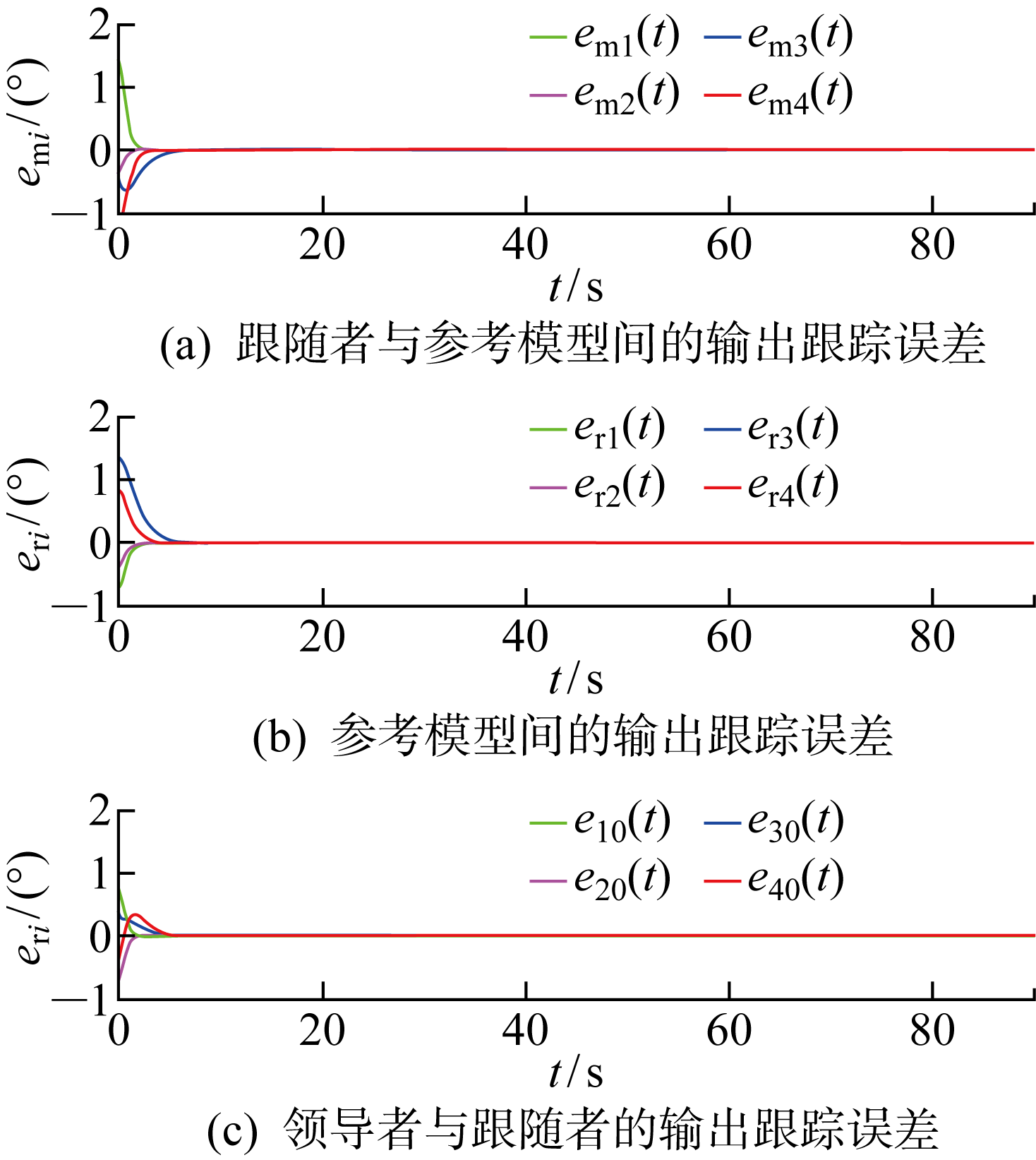
领导者-跟随者系统输出跟踪误差
| [1] | GONG J, JIANG B, MA Y. Adaptive fault tolerant supervisory consensus control for nonlinear strict-feedback multiagent systems[C]//International Conference on Guidance, Navigation and Control. Singapore, Singapore: Springer, 2022: 1603-1703. |
| [2] | CHU H, CAI Y, ZHANG W. Consensus tracking for multi-agent systems with directed graph via distributed adaptive protocol[J]. Neurocomputing, 2015, 166: 8-13. |
| [3] | BAO G, MA L, YI X. Recent advances on cooperative control of heterogeneous multi-agent systems subject to constraints: A survey[J]. Systems Science & Control Engineering, 2022, 10(1): 539-551. |
| [4] | CANESE L, CARDARILLI G C, DI N L, et al. Multi-agent reinforcement learning: A review of challenges and applications[J]. Applied Sciences, 2021, 11(11): 1-25. |
| [5] | AMIRKHANI A, BARSHOOI A H. Consensus in multi-agent systems: A review[J]. Artificial Intelligence Review, 2022, 55(5): 3897-3935. |
| [6] | SKEIK O, LANZON A. Robust output consensus of homogeneous multi-agent systems with negative imaginary dynamics[J]. Automatica, 2020, 113: 108799. |
| [7] | BHATTACHARYYA S, PATRA S. Positive consensus of multi-agent systems with hierarchical control protocol[J]. Automatica, 2022, 139: 110191. |
| [8] | YU P, LIU K, LIU X, et al. Robust consensus tracking control of uncertain multi-agent systems with local disturbance rejection[J]. IEEE/CAA Journal of Automatica Sinica, 2023, 10(2): 427-438. |
| [9] | 沈林成, 牛轶峰, 朱华勇. 多无人机自主协同控制理论与方法[M]. 北京: 国防工业出版社, 2013. |
| SHEN Lincheng, NIU Yifeng, ZHU Huayong. Theories and methods of autonomous cooperative control for multiple UAVs[M]. Bejing: National Defense Industry Press, 2013. | |
| [10] | HU D, VINCENT J L G, WANG T, et al. Multi-agent robotic system (MARS) for UAV-UGV path planning and automatic sensory data collection in cluttered environments[J]. Building and Environment, 2022, 221: 109349. |
| [11] | YAN B, SHI P, LIM C C. Robust formation control for nonlinear heterogeneous multiagent systems based on adaptive event-triggered strategy[J]. IEEE Transactions on Automation Science and Engineering, 2022, 19(4): 2788-2800. |
| [12] |
YAO D, LI H, LU R, et al. Distributed sliding-mode tracking control of second-order nonlinear multiagent systems: An event-triggered approach[J]. IEEE Transactions on Cybernetics, 2020, 50(9): 3892-3902.
doi: 10.1109/TCYB.2019.2963087 pmid: 31995513 |
| [13] | ZHANG J, ZHANG H, LU Y, et al. Cooperative output regulation of heterogeneous linear multi-agent systems with edge-event triggered adaptive control under time-varying topologies[J]. Neural Computing and Applications, 2020, 32(19): 15573-15584. |
| [14] | WEN L, TAO G, YANG H, et al. Adaptive actuator failure compensation for possibly nonminimum-phase systems using control separation based LQ design[J]. IEEE Transactions on Automatic Control, 2018, 64(1): 143-158. |
| [15] | WEN L, TAO G, JIANG B, et al. Adaptive LQ control using reduced hamiltonian for continuous-time systems with unmatched input disturbances[J]. SIAM Journal on Control and Optimization, 2021, 59(5): 3625-3660. |
| [16] | HAN T, GUAN Z, XIAO B, et al. Bipartite average tracking for multi-agent systems with disturbances: Finite-time and fixed-time convergence[J]. IEEE Transactions on Circuits and Systems I: Regular Papers, 2021, 68(10): 4393-4402. |
| [17] | CAO W, LIU L, FENG G. Distributed adaptive output consensus of unknown heterogeneous non-minimum phase multi-agent systems[J]. IEEE/CAA Journal of Automatica Sinica, 2023, 10(4): 997-1008. |
| [18] | YANG R, LIU L, FENG G. Cooperative output tracking of unknown heterogeneous linear systems by distributed event-triggered adaptive control[J]. IEEE Transactions on Cybernetics, 2020, 52(1): 3-15. |
| [19] | 马思迁, 董朝阳, 马鸣宇, 等. 基于自适应通信拓扑四旋翼无人机编队重构控制[J]. 北京航空航天大学学报, 2018, 44(4): 841-850. |
| MA Siqian, DONG Chaoyang, MA Mingyu, et al. Formation reconfiguration control of quadrotor UAVs based on adaptive communication topology[J]. Journal of Beijing University of Aeronautics and Astronasutics, 2018, 44(4): 841-850. | |
| [20] | BALDI S, YUAN S, PAOLO F. Output synchronization of unknown heterogeneous agents via distributed model reference adaptation[J]. IEEE Transactions on Control of Network Systems, 2018, 6(2): 515-525. |
| [21] | ROSA M R. Adaptive synchronization for heterogeneous multi-agent systems with switching topologies[J]. Machines, 2018, 6(1): 1-18. |
| [22] | SONG G, TAO G, TAN C. A distributed adaptive state feedback control scheme for output consensus of multi-agent systems[C]//Asian Control Conference. Piscataway, USA: IEEE, 2019: 1149-1154. |
| [23] | WEN L, TAO G, YANG H, et al. Aircraft turbulence compensation using adaptive multivariable disturbance rejection techniques[J]. Journal of Guidance, Control, and Dynamics, 2015, 38(5): 954-963. |
| [24] | TAO G. Adaptive control design and analysis[M]. New York, USA: John Wiley & Sons, 2003. |
| [25] | 杨浩, 姜斌, 周东华. 互联系统容错控制的研究回顾与展望[J]. 自动化学报, 2017, 43(1): 9-19. |
| YANG Hao, JIANG Bin, ZHOU Donghua. Review and perspectives on fault tolerant control for interconnected systems[J]. Acta Automatica Sinica, 2017, 43(1): 9-19. | |
| [26] | ESTEBAN R, ANTONIO L, LOANNIS S, et al. Robust consensus of high-order systems under output constraints: Application to rendezvous of underactuated UAVs[J]. IEEE Transactions on Automatic Control, 2023, 68(1): 329-342. |
| [27] | CHANG J, SHI H, ZHU S, et al. Time cost for consensus of stochastic multiagent systems with pinning control[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2023, 53(1): 94-104. |
| [28] | XU H, YU T, REN C, et al. Finite-time decentralized sliding mode control for interconnected systems and its application to electrical power systems: A GA-assisted design method[J]. IEEE Transactions on Circuits and Systems I: Regular Papers, 2024, 71(6): 2835-2847. |
| [29] | DI G S. Output stabilization of flexible spacecraft with active vibration suppression[J]. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(3): 747-759. |
| [30] | VOURNAS C D, PAPADIAS B C. Power system stabilization via parameter optimization-application to the hellenic interconnected system[J]. IEEE Transactions on Power Systems, 1987, 2(3): 615-622. |
| [31] | SONG G, TAO G. Adaptive leader-following state consensus of multiagent systems with switching topology[J]. International Journal of Adaptive Control and Signal Processing, 2018, 32(10): 1508-1528. |
| [1] | 武晓晶,曹童瑶,甄然,李志杰. 基于切换拓扑和非合作目标的无人机群系统的时变编队合围跟踪控制[J]. J Shanghai Jiaotong Univ Sci, 2024, 29(4): 689-701. |
| [2] | 耿宗盛1,赵东东1, 2,周兴文1,闫磊1, 阎石1, 2. 基于全分布式事件驱动控制的多智能体系统领导-跟随一致性研究[J]. J Shanghai Jiaotong Univ Sci, 2024, 29(4): 640-645. |
| [3] | 邢优靖1, 高金凤1, 刘小平1, 2, 吴平1. 带有时延和切换拓扑的二阶非线性多智能体系统事件触发固定时间一致性[J]. J Shanghai Jiaotong Univ Sci, 2024, 29(4): 625-639. |
| [4] | 焦聪, 许兆胜, 李威, 田道贵, 陈炼, 赵征. 针对分布式集群的空中诱骗对抗方法[J]. 空天防御, 2024, 7(4): 114-120. |
| [5] | 丁明, 孟帅, 王书恒, 夏玺. 六自由度波浪补偿平台的神经网络自适应反馈线性化控制[J]. 上海交通大学学报, 2022, 56(2): 165-172. |
| [6] | 金皓纯, 葛敏辉, 徐波. 基于极限学习机的双馈感应风力发电机综合自适应调频参数优化方法[J]. 上海交通大学学报, 2021, 55(S2): 42-50. |
| [7] | 付昊, 周波华, 马萌晨. 可规定性能的自适应滑模制导律[J]. 空天防御, 2020, 3(3): 63-70. |
| [8] | 姚来鹏, 侯保林, 刘曦. 采用摩擦补偿的弹药传输机械臂自适应终端滑模控制[J]. 上海交通大学学报, 2020, 54(2): 144-151. |
| [9] | 郭秦阳,施光林,王冬梅. 间歇激励条件下电液伺服系统的复合自适应控制[J]. 上海交通大学学报, 2019, 53(6): 639-646. |
| [10] | 薛长森, 戚志东, 单梁, 唐鹏亮. 基于超稳定性理论的分数阶MRAC设计[J]. 空天防御, 2018, 1(1): 44-49. |
| [11] | 施新华, 周芝峰. 永磁同步电动机自适应弱磁控制策略[J]. 实验室研究与探索, 2017, 36(5): 40-43. |
| [12] | 李冬冬, 许明明, 胡德金, 许黎明. 基于动态阈值的模糊自适应控制高硬度球面磨削方法[J]. 上海交通大学学报(自然版), 2011, 45(06): 895-900. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||