上海交通大学学报 ›› 2022, Vol. 56 ›› Issue (7): 868-876.doi: 10.16183/j.cnki.jsjtu.2021.186
所属专题: 《上海交通大学学报》2022年“电子信息与电气工程”专题
徐晨辉, 俞芳慧, 何德峰( )
)
收稿日期:2021-06-02
出版日期:2022-07-28
发布日期:2022-08-16
通讯作者:
何德峰
E-mail:hdfzj@zjut.edu.cn.
作者简介:徐晨辉(1996-),男,浙江省宁波市人,博士生,研究方向为鲁棒滚动时域估计.
基金资助:
XU Chenhui, YU Fanghui, HE Defeng()
Received:2021-06-02
Online:2022-07-28
Published:2022-08-16
Contact:
HE Defeng
E-mail:hdfzj@zjut.edu.cn.
摘要:
针对柔性机械臂因在实际运动过程中易发生变形而需进行状态监测的问题,提出一种基于扰动块的分布式滚动时域估计算法.在分布式一致性滚动时域估计的基础上,通过设计扰动块并将其应用于估计窗口内的过程扰动序列,减少了与优化相关的变量,从而降低了算法的计算量,实现快速性.通过分析算法在最大分块长度下的可行性与收敛性,建立了保证算法的优化问题存在等价解的假设条件,并将结果推广到了过程扰动任意分块的情况.仿真结果表明:与不加扰动块的算法相比,所提算法能在不影响估计误差的前提下有效缩短计算时间.
中图分类号:
徐晨辉, 俞芳慧, 何德峰. 基于扰动块的柔性臂分布式滚动时域估计[J]. 上海交通大学学报, 2022, 56(7): 868-876.
XU Chenhui, YU Fanghui, HE Defeng. Disturbance-Blocking-Based Distributed Receding Horizon Estimation of Flexible Joint Robots[J]. Journal of Shanghai Jiao Tong University, 2022, 56(7): 868-876.

图1
单自由度柔性机械臂
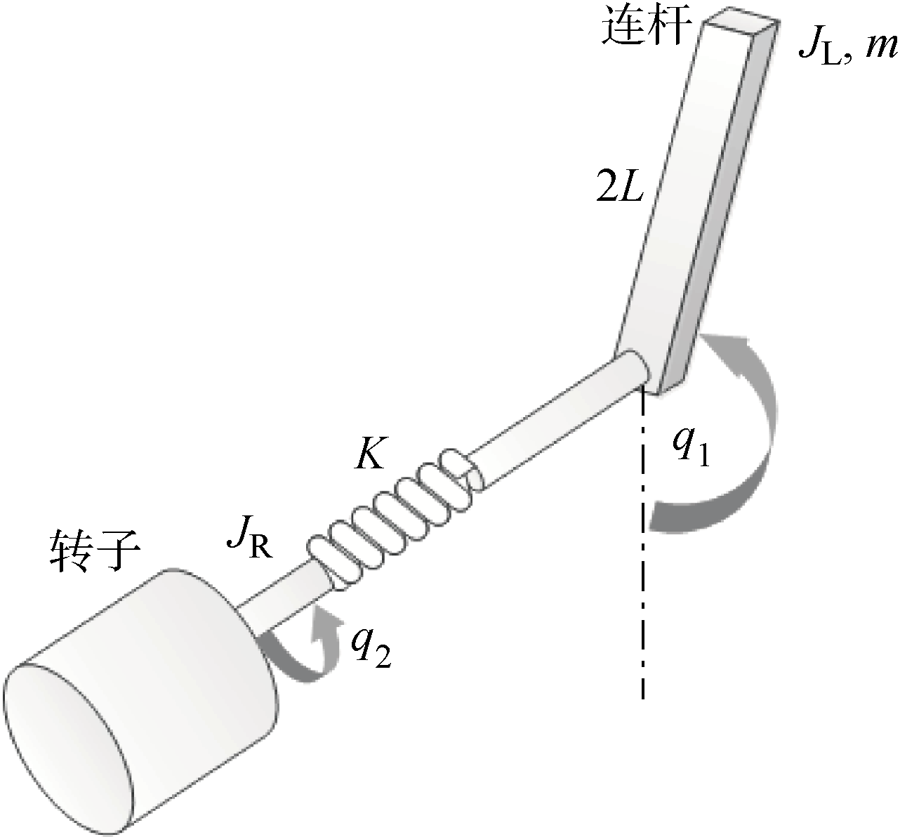
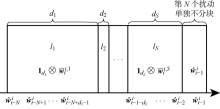
图2
基于块结构的扰动示意图
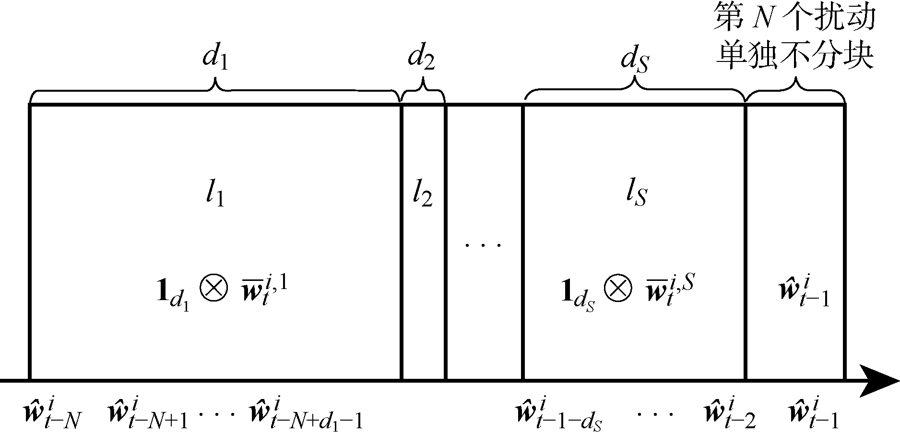
图3
基于最大分块长度块结构的扰动示意图
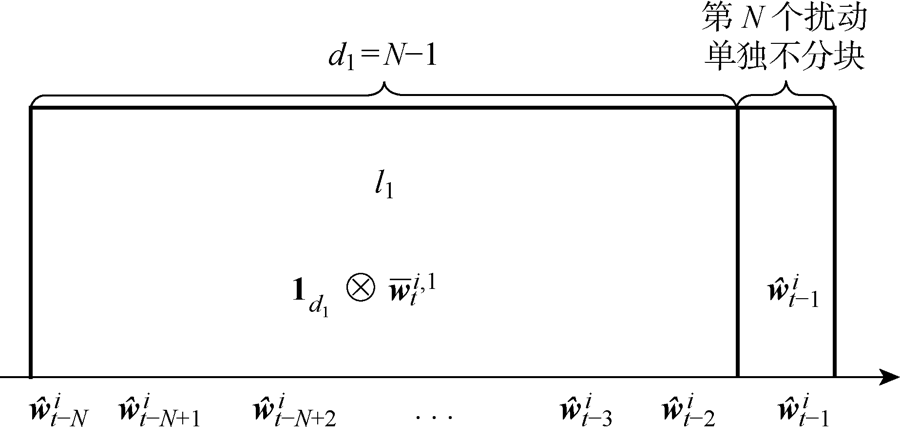
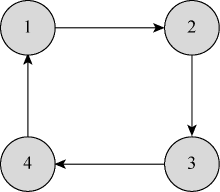
图4
传感器网络
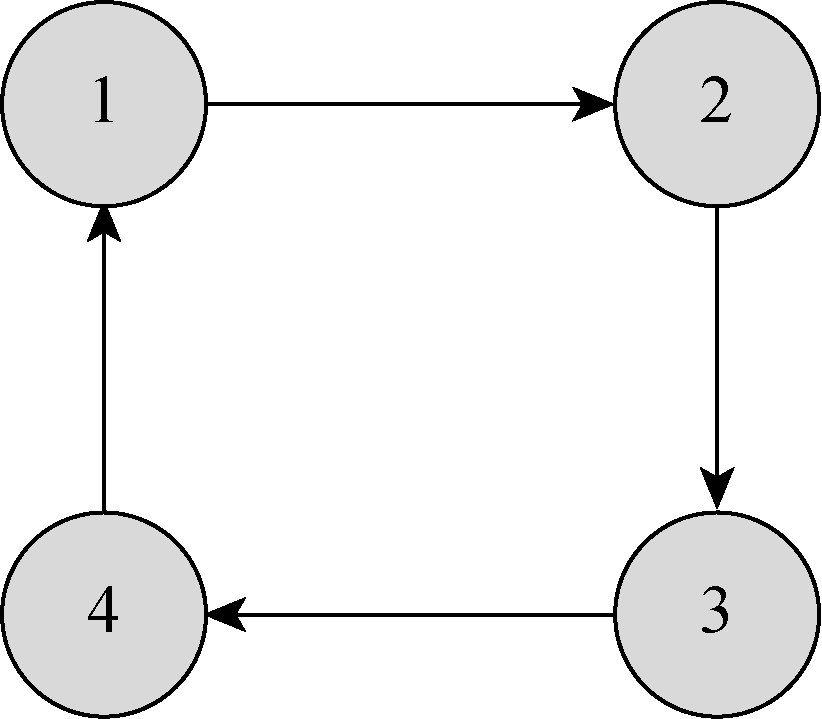
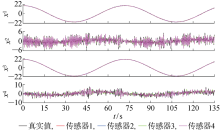
图5
状态轨迹估计

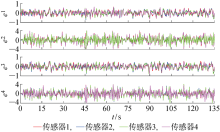
图6
估计误差

表1
基于算法Ⅲ状态分量估计的均方根误差
| 状态 分量 | 传感器1 误差 | 传感器2 误差 | 传感器3 误差 | 传感器4 误差 |
|---|---|---|---|---|
| x1 | 0.2332 | 0.2239 | 0.2266 | 0.2324 |
| x2 | 1.5689 | 1.2659 | 1.2533 | 1.5555 |
| x3 | 0.2277 | 0.2402 | 0.2441 | 0.2301 |
| x4 | 1.2241 | 1.4518 | 1.4605 | 1.2418 |
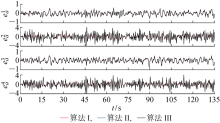
图7
不同算法下状态分量平均估计误差对比
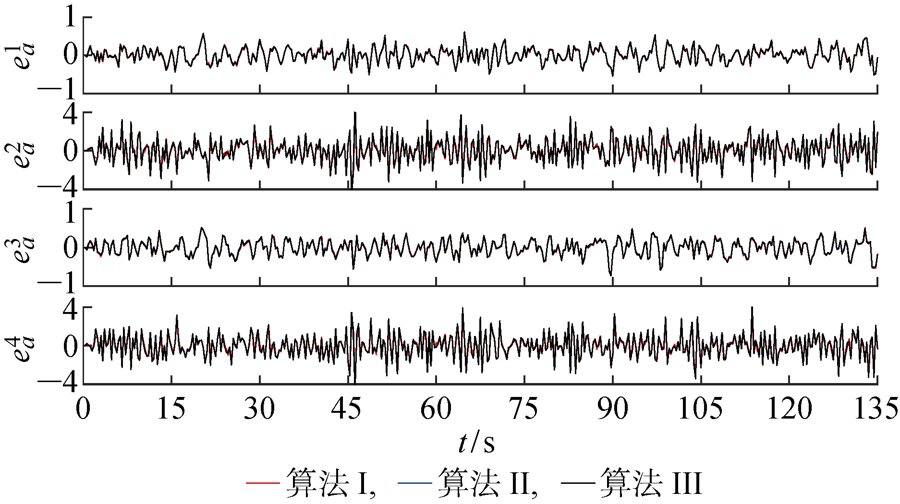
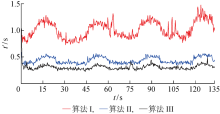
图8
不同算法平均计算时间对比
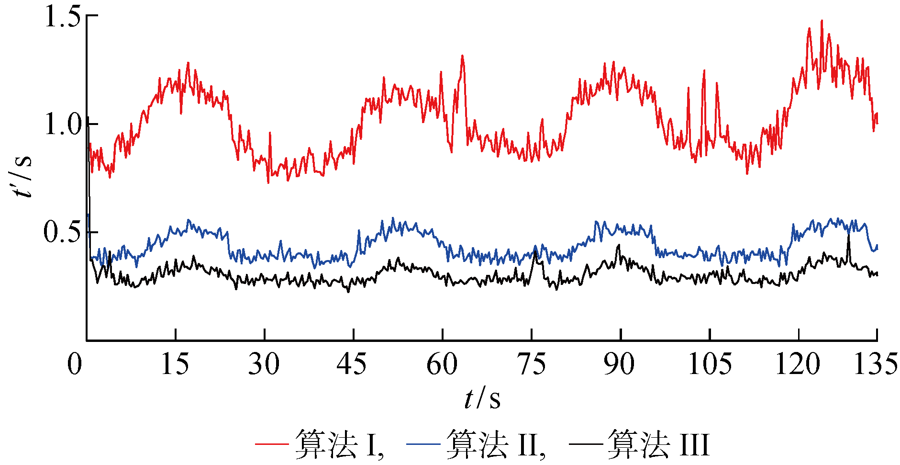
表2
不同算法平均计算时间与均方根误差对比
| 算法 | 传感器1 ACT/s | 传感器2 ACT/s | 传感器3 ACT/s | 传感器4 ACT/s | RMSE |
|---|---|---|---|---|---|
| I | 1.0101 | 1.0272 | 1.0222 | 1.0062 | 0.8318 |
| II | 0.4327 | 0.4382 | 0.4374 | 0.4373 | 0.8318 |
| III | 0.3093 | 0.3072 | 0.3051 | 0.3041 | 0.8318 |
| [1] |
SPONG M W. Modeling and control of elastic joint robots[J]. Journal of Dynamic Systems, Measurement, and Control, 1987, 109(4): 310-318.
doi: 10.1115/1.3143860 URL |
| [2] |
KIM M J, BECK F, OTT C, et al. Model-free friction observers for flexible joint robots with torque measurements[J]. IEEE Transactions on Robotics, 2019, 35(6): 1508-1515.
doi: 10.1109/TRO.2019.2926496 URL |
| [3] |
LING S, WANG H Q, LIU P X. Adaptive fuzzy tracking control of flexible-joint robots based on command filtering[J]. IEEE Transactions on Industrial Electronics, 2020, 67(5): 4046-4055.
doi: 10.1109/TIE.2019.2920599 URL |
| [4] |
KIM J, CROFT E A. Full-state tracking control for flexible joint robots with singular perturbation techniques[J]. IEEE Transactions on Control Systems Technology, 2019, 27(1): 63-73.
doi: 10.1109/TCST.2017.2756962 URL |
| [5] |
LIU X, ZHAO F, GE S S, et al. End-effector force estimation for flexible-joint robots with global friction approximation using neural networks[J]. IEEE Transactions on Industrial Informatics, 2019, 15(3): 1730-1741.
doi: 10.1109/TII.2018.2876724 URL |
| [6] | 于仕泽, 王周义, 戴振东, 等. 一种面向航天需求的仿生柔性机械臂的设计[J]. 机械制造与自动化, 2020, 49(1): 134-137. |
| YU Shize, WANG Zhouyi, DAI Zhendong, et al. Design of bionic flexible arm in aerospace demand[J]. Machine Building & Automation, 2020, 49(1): 134-137. | |
| [7] | ZOU S Z, PAN B, FU Y L, et al. Extended high-gain observer based adaptive control of flexible-joint surgical robot[C]∥2016 IEEE International Conference on Robotics and Biomimetics. Qingdao, China: IEEE, 2016: 2128-2133. |
| [8] | 陈晓云. 车载柔性机械臂系统轨迹跟踪补偿控制研究[J]. 自动化与仪器仪表, 2016(6): 90-91. |
| CHEN Xiaoyun. On-board flexible manipulator system trajectory tracking compensation control research[J]. Automation & Instrumentation, 2016(6): 90-91. | |
| [9] |
KIM M J, CHUNG W K. Disturbance-observer-based PD control of flexible joint robots for asymptotic convergence[J]. IEEE Transactions on Robotics, 2015, 31(6): 1508-1516.
doi: 10.1109/TRO.2015.2477957 URL |
| [10] |
LIU X, YANG C G, CHEN Z G, et al. Neuro-adaptive observer based control of flexible joint robot[J]. Neurocomputing, 2018, 275: 73-82.
doi: 10.1016/j.neucom.2017.05.011 URL |
| [11] |
KIM M J, BECK F, OTT C, et al. Model-free friction observers for flexible joint robots with torque measurements[J]. IEEE Transactions on Robotics, 2019, 35(6): 1508-1515.
doi: 10.1109/TRO.2019.2926496 URL |
| [12] |
ZOU L, WANG Z D, HAN Q L, et al. Moving horizon estimation for networked time-delay systems under round-robin protocol[J]. IEEE Transactions on Automatic Control, 2019, 64(12): 5191-5198.
doi: 10.1109/TAC.2019.2910167 URL |
| [13] |
LIU A D, ZHANG W A, CHEN M Z Q, et al. Moving horizon estimation for mobile robots with multirate sampling[J]. IEEE Transactions on Industrial Electronics, 2017, 64(2): 1457-1467.
doi: 10.1109/TIE.2016.2611458 URL |
| [14] |
HAN C Y, LI C C, HE F, et al. Receding horizon estimation for linear discrete-time systems with multi-channel observation delays[J]. IEEE/CAA Journal of Automatica Sinica, 2019, 6(2): 478-484.
doi: 10.1109/JAS.2018.7511261 URL |
| [15] |
XU Y, ZHOU J Y, RAO H X, et al. Reset moving horizon estimation for quantized discrete time systems[J]. IEEE Transactions on Automatic Control, 2021, 66(9): 4199-4205.
doi: 10.1109/TAC.2020.3037140 URL |
| [16] | 何德峰, 俞芳慧, 徐晨辉. 网联车辆协同巡航系统快速滚动时域状态估计[J]. 控制理论与应用, 2021, 38(4): 457-466. |
| HE Defeng, YU Fanghui, XU Chenhui. Fast receding horizon state estimation of cooperative cruise systems of connected vehicles[J]. Control Theory & Applications, 2021, 38(4): 457-466. | |
| [17] | 刘帅, 赵国荣, 曾宾, 等. 带丢包和量化的参数不确定系统滚动时域估计[J]. 系统工程与电子技术, 2020, 42(4): 912-918. |
| LIU Shuai, ZHAO Guorong, ZENG Bin, et al. Moving horizon estimation for uncertain systems with packet dropouts and quantization[J]. Systems Engineering and Electronics, 2020, 42(4): 912-918. | |
| [18] | 刘帅, 赵国荣, 曾宾, 等. 测量数据丢失的随机不确定系统滚动时域估计[J]. 控制与决策, 2021, 36(2): 450-456. |
| LIU Shuai, ZHAO Guorong, ZENG Bin, et al. Moving horizon estimation for stochastic uncertain system with missing measurements[J]. Control and Decision, 2021, 36(2): 450-456. | |
| [19] |
FARINA M, FERRARI-TRECATE G, SCATTOLINI R. Distributed moving horizon estimation for linear constrained systems[J]. IEEE Transactions on Automatic Control, 2010, 55(11): 2462-2475.
doi: 10.1109/TAC.2010.2046058 URL |
| [20] |
BATTISTELLI G. Distributed moving-horizon estimation with arrival-cost consensus[J]. IEEE Transactions on Automatic Control, 2019, 64(8): 3316-3323.
doi: 10.1109/TAC.2018.2879598 URL |
| [21] |
YIN X Y, LIU J F. Distributed moving horizon state estimation of two-time-scale nonlinear systems[J]. Automatica, 2017, 79: 152-161.
doi: 10.1016/j.automatica.2017.01.023 URL |
| [22] | LI H P, SHI Y, YAN W S. Distributed receding horizon estimation for sensor networks with improved consensus strategy[C]∥Proceedings of the 33rd Chinese Control Conference. Nanjing, China: IEEE, 2014: 316-321. |
| [23] | VENTURINO A, BERTRAND S, MANIU C S, et al. Distributed moving horizon estimation with pre-estimating observer[C]∥2020 24th International Conference on System Theory, Control and Computing. Sinaia, Romania: IEEE, 2020: 174-179. |
| [24] |
ZENG J, LIU J F. Distributed moving horizon state estimation: Simultaneously handling communication delays and data losses[J]. Systems & Control Letters, 2015, 75: 56-68.
doi: 10.1016/j.sysconle.2014.11.007 URL |
| [25] |
LEE J H, CHIKKULA Y, YU Z H, et al. Improving computational efficiency of model predictive control algorithm using wavelet transformation[J]. International Journal of Control, 1995, 61(4): 859-883.
doi: 10.1080/00207179508921935 URL |
| [26] |
CAGIENARD R, GRIEDER P, KERRIGAN E C, et al. Move blocking strategies in receding horizon control[J]. Journal of Process Control, 2007, 17(6): 563-570.
doi: 10.1016/j.jprocont.2007.01.001 URL |
| [27] |
SHEKHAR R C, MANZIE C. Optimal move blocking strategies for model predictive control[J]. Automatica, 2015, 61: 27-34.
doi: 10.1016/j.automatica.2015.07.030 URL |
| [28] |
SON S H, OH T H, KIM J W, et al. Move blocked model predictive control with improved optimality using semi-explicit approach for applying time-varying blocking structure[J]. Journal of Process Control, 2020, 92: 50-61.
doi: 10.1016/j.jprocont.2020.04.002 URL |
| [29] |
JUNG T Y, JANG H, LEE J H. Move blocking strategy applied to re-entrant manufacturing line scheduling[J]. International Journal of Control, Automation and Systems, 2015, 13(2): 410-418.
doi: 10.1007/s12555-014-0243-9 URL |
| [1] | 周添龙, 姚方競, 饶卫雄. 部分已知状态空间模型下的目标状态估计算法[J]. 空天防御, 2025, 8(3): 111-122. |
| [2] | 唐荻音, 王预夫, 郑文健, 黄旭聪, 邢雅兰. 基于等效模型的锂离子电池荷电状态估计算法综述[J]. 空天防御, 2024, 7(6): 104-111. |
| [3] | 臧红岩, 谢晓龙, 徐亚周, 陶业, 高长生. 基于循环神经网络的高超声速机动目标状态估计算法[J]. 空天防御, 2024, 7(4): 88-98. |
| [4] | 刘禹铭, 赵勇, 董正建, 王平, 姬煜琦. 基于反步法的多移载工装协同作业编队控制策略[J]. 上海交通大学学报, 2023, 57(1): 103-115. |
| [5] | 卢地华, 陈自强. 基于双充电状态的锂离子电池健康状态估计[J]. 上海交通大学学报, 2022, 56(3): 342-352. |
| [6] | 杜宇石, 琚长江, 杨根科. 基于非线性观测器的超级电容器荷电状态在线估计[J]. 上海交通大学学报, 2022, 56(12): 1630-1637. |
| [7] | 严正1,孔祥瑞1,徐潇源1,谢伟2. 微型同步相量测量单元在智能配电网运行状态估计中的应用[J]. 上海交通大学学报, 2018, 52(10): 1195-1205. |
| [8] | 李雄杰1,2,周东华2. 混杂系统故障诊断的粒子滤波器方法[J]. 上海交通大学学报(自然版), 2015, 49(06): 849-854. |
| [9] | 孔庆杰,陈宜开,刘允才. 基于证据融合的实时交通状态估计[J]. 上海交通大学学报(自然版), 2008, 42(10): 1682-1686. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||