上海交通大学学报 ›› 2021, Vol. 55 ›› Issue (8): 1035-1048.doi: 10.16183/j.cnki.jsjtu.2020.387
所属专题: 《上海交通大学学报》2021年12期专题汇总专辑; 《上海交通大学学报》2021年“自动化技术、计算机技术”专题
• 专家论坛 • 上一篇
胡益恺, 王春香( ), 杨明
), 杨明
收稿日期:2020-11-23
出版日期:2021-08-28
发布日期:2021-08-31
通讯作者:
王春香
E-mail:wangcx@sjtu.edu.cn
作者简介:胡益恺(1996-),男,安徽省合肥市人,硕士生,主要研究方向为机器人
基金资助:
HU Yikai, WANG Chunxiang(), YANG Ming
Received:2020-11-23
Online:2021-08-28
Published:2021-08-31
Contact:
WANG Chunxiang
E-mail:wangcx@sjtu.edu.cn
摘要:
结合目前国内外智能车辆决策方法的研究现状,分别从决策的输入、输出、周边环境交互方式以及算法类型4个方面对决策方法进行分类归纳、优缺点分析以及适用场景评估;总结归纳现阶段常见决策评估方法以及用于决策研究的数据集;分析现阶段决策方法所面临的技术难点以及未来发展趋势.
中图分类号:
胡益恺, 王春香, 杨明. 智能车辆决策方法研究综述[J]. 上海交通大学学报, 2021, 55(8): 1035-1048.
HU Yikai, WANG Chunxiang, YANG Ming. Decision-Making Method of Intelligent Vehicles: A Survey[J]. Journal of Shanghai Jiao Tong University, 2021, 55(8): 1035-1048.
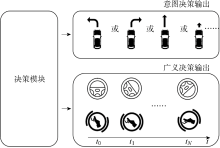
图1
决策模块输出示意图

表1
依据输入输出类型的决策方法分类
| 类别 | 优势 | 劣势 | 文献编号 |
|---|---|---|---|
| 路侧感知模块输入 | 全局可观感知信息 | 对基础设施有高要求 | [ |
| 感知计算结果输入 | 数据易处理 | 丢失丰富的感知信息 | [ |
| 车载原始信息输入 | 拥有丰富的感知信息 | 感知范围受限易遮挡 | [ |
| 意图决策输出 | 具有明确的决策意图 | 难以枚举现实场景 | [ |
| 广义决策输出 | 遍历更广的解空间 | 决策意图不明晰 | [ |
表2
依据与环境交互方式的决策方法分类
| 类别 | 优势 | 劣势 | 文献编号 |
|---|---|---|---|
| 博弈形式 | 与环境存在主动交互 | 假设全为理性决策者 | [ |
| 礼让形式 | 车辆安全性较高 | 车辆智能度偏低 | [ |
表3
依据算法类型的决策方法分类
| 类别 | 优势 | 劣势 | 文献编号 |
|---|---|---|---|
| 基于状态机 | 逻辑清晰 | 复杂场景表现不佳 | [ |
| 基于深度监督学习 | 灵活性强 | 对训练数据要求较高 | [ |
| 基于强化学习 | 运算效率高 | 局限于人工设定奖惩 | [ |
| 基于逆强化学习 | 算法生成奖励函数 | 易造成过拟合 | [ |
表4
NGSIM 数据集数据格式
| 编号 | 名称 | 描述 |
|---|---|---|
| 1 | vehicle ID | 车辆编号 |
| 2 | frame ID | 数据帧号 |
| 3 | total frames | 数据总帧 |
| 4 | global time | 标准时间 |
| 5 | local x | 坐标系x值 |
| 6 | local y | 坐标系y值 |
| 7 | global x | 标准地理坐标系x值 |
| 8 | global y | 标准地理坐标系y值 |
| 9 | vehicle length | 车辆长度 |
| 10 | vehicle width | 车辆宽度 |
| 11 | vehicle class | 车辆类型 |
| 12 | vehicle velocity | 车辆速度 |
| 13 | vehicle acceleration | 车辆加速度 |
| 14 | lane identification | 车道编号 |
| 15 | preceding vehicle | 跟驰前车编号 |
| 16 | following vehicle | 跟驰后车编号 |
| 17 | spacing | 车头间距 |
| 18 | headway | 车头时距 |
表5
High-D数据集数据格式
| 编号 | 名称 | 描述 |
|---|---|---|
| 1 | id | 记录的ID |
| 2 | frameRate | 用来录制视频的帧速率 |
| 3 | locationId | 记录位置的ID |
| 4 | speedLimit | 行驶车道的速度限制 |
| 5 | month | 录制的月份 |
| 6 | weekDay | 录制的工作日完成 |
| 7 | startTime | 录制的开始时间 |
| 8 | duration | 记录的持续时间 |
| 9 | totalDrivenDistance | 所有履带车辆的总行驶距离 |
| 10 | totalDrivenTime | 所有履带车辆的总行驶时间 |
| 11 | numVehicles | 跟踪的车辆数量,包括汽车和卡车 |
| 12 | numCars | 跟踪的汽车数量 |
| 13 | numTrucks | 跟踪的卡车数量 |
| 14 | upperLaneMarkings | 上车道标记的y位置 |
| 15 | lowerLaneMarkings | 下车道标记的y位置 |
表6
INTERACTION 数据集数据格式
| 编号 | 名称 | 描述 |
|---|---|---|
| 1 | track_id | 代表车辆的ID |
| 2 | frame_id | 车辆出现在视频中的帧 |
| 3 | timestamp_ms | 时间戳 |
| 4 | agent_type | 跟踪类型:“行人/自行车” |
| 5 | x | 每一帧的坐标x |
| 6 | y | 每一帧的坐标y |
| 7 | vx | x方向速度 |
| 8 | vy | y方向速度 |
表7
Level 5 数据集数据格式
| 编号 | 名称 | 描述 | 编号 | 名称 | 描述 |
|---|---|---|---|---|---|
| 1 | timestamp | 时间戳 | 6 | extent | 车辆尺寸 |
| 2 | agent_index_interval | 车辆ID | 7 | yaw | 车辆朝向 |
| 3 | ego_translation | 自车位置转换向量 | 8 | velocity | 车辆速度 |
| 4 | ego_rotation | 自车朝向转换向量 | 9 | track_id | 轨迹ID |
| 5 | centroid | 车辆坐标 | 10 | label_probabilities | 车辆类型置信度 |
表8
数据集总结表
| 数据集 | 场景描述 | 地点 | 时长/min | 采样率/Hz | 数据格式 | 文献编号 |
|---|---|---|---|---|---|---|
| NGSIM | 高速、城市道路 | 美国 | 90 | 10 | csv | [ |
| High-D | 高速公路 | 德国 | 690 | 25 | csv | [ |
| INTERACTION | 路口场景 | 世界 | 990. 98 | 10 | csv | [ |
| Level 5 | 城市道路 | 美国 | 1002 | 10 | zarr | [ |
| [1] | 胡兵, 杨明, 郭林栋, 等. 基于地面快速鲁棒特征的智能车全局定位方法[J]. 上海交通大学学报, 2019, 53(2):203-208. |
| HU Bing, YANG Ming, GUO Lindong, et al. Global localization for intelligent vehicles using ground SURF[J]. Journal of Shanghai Jiao Tong University, 2019, 53(2):203-208. | |
| [2] | 杜明博, 梅涛, 陈佳佳, 等. 复杂环境下基于RRT的智能车辆运动规划算法[J]. 机器人, 2015, 37(4):443-450. |
| DU Mingbo, MEI Tao, CHEN Jiajia, et al. RRT-based motion planning algorithm for intelligent vehicle in complex environments[J]. Robot, 2015, 37(4):443-450. | |
| [3] | 陈佳佳. 城市环境下无人驾驶车辆决策系统研究[D]. 合肥: 中国科学技术大学, 2014. |
| CHEN Jiajia. Research on decision making system of autonomous vehicle in urban environments[D]. Hefei: University of Science and Technology of China, 2014. | |
| [4] |
SCHWARTING W, ALONSO-MORA J, RUS D. Planning and decision-making for autonomous vehicles[J]. Annual Review of Control, Robotics, and Autonomous Systems, 2018, 1(1):187-210.
doi: 10.1146/control.2018.1.issue-1 URL |
| [5] | 熊璐, 康宇宸, 张培志, 等. 无人驾驶车辆行为决策系统研究[J]. 汽车技术, 2018(8):1-9. |
| XIONG Lu, KANG Yuchen, ZHANG Peizhi, et al. Research on behavior decision-making system for unmanned vehicle[J]. Automobile Technology, 2018(8):1-9. | |
| [6] | GONZÁLEZ D S, GARZÓN M, DIBANGOYE J S, et al. Human-like decision-making for automated driving in highways[C]//2019 IEEE Intelligent Transportation Systems Conference (ITSC). Auckland, New Zealand: IEEE, 2019: 2087-2094. |
| [7] |
NOH S, AN K. Decision-making framework for automated driving in highway environments[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(1):58-71.
doi: 10.1109/TITS.2017.2691346 URL |
| [8] | XIONG G M, KANG Z Y, LI H, et al. Decision-making of lane change behavior based on RCS for automated vehicles in the real environment[C]//2018 IEEE Intelligent Vehicles Symposium (IV). Changshu: IEEE, 2018: 1400-1405. |
| [9] |
NISHI T, DOSHI P, PROKHOROV D. Merging in congested freeway traffic using multipolicy decision making and passive actor-critic learning[J]. IEEE Transactions on Intelligent Vehicles, 2019, 4(2):287-297.
doi: 10.1109/TIV URL |
| [10] |
KANG K, RAKHA H A. A repeated game freeway lane changing model[J]. Sensors, 2020, 20(6):1554.
doi: 10.3390/s20061554 URL |
| [11] | KANG K, RAKHA H A. Game theoretical approach to model decision making for merging maneuvers at freeway on-ramps[J]. Transportation Research Record Journal of the Transportation Research Board, 2017, 2623(1):19-28. |
| [12] |
GUO J Q, CHENG S L, LIU Y. Merging and diverging impact on mixed traffic of regular and autonomous vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 22(3):1639-1649.
doi: 10.1109/TITS.6979 URL |
| [13] | HOEL C J, WOLFF K, LAINE L. Automated speed and lane change decision making using deep reinforcement learning[C]//2018 21st International Conference on Intelligent Transportation Systems (ITSC). Maui, HI, USA: IEEE, 2018: 2148-2155. |
| [14] | ALIZADEH A, MOGHADAM M, BICER Y, et al. Automated lane change decision making using deep reinforcement learning in dynamic and uncertain highway environment[C]//2019 IEEE Intelligent Transportation Systems Conference (ITSC). Auckland, New Zealand: IEEE, 2019: 1399-1404. |
| [15] | LI T T, WU J P, CHAN C Y. Evolutionary learning in decision making for tactical lane changing[C]//2019 IEEE Intelligent Transportation Systems Conference (ITSC). Auckland, New Zealand: IEEE, 2019: 19211185. |
| [16] | CODEVILLA F, MÜLLER M, LÓPEZ A, et al. End-to-end driving via conditional imitation learning[C]//2018 IEEE International Conference on Robotics and Automation (ICRA). Brisbane, QLD, Australia: IEEE, 2018: 4693-4700. |
| [17] | SANTANA E, HOTZ G. Learning a driving simulator[EB/OL]. (2016-08-01) [2020-06-14]. https://www.researchgate.net/publication/305809416_Learning_a_Driving_Simulator . |
| [18] | YUAN W, YANG M, WANG C X, et al. Longitudinal and lateral coupling model based end-to-end learning for lane keeping of self-driving cars[C]//International Conference on Cognitive Systems and Signal Processing. Beijing: ICCSIP, 2019: 425-436. |
| [19] |
YUAN W, YANG M, LI H, et al. End-to-end learning for high-precision lane keeping via multi-state model[J]. CAAI Transactions on Intelligence Technology, 2018, 3(4):185-190.
doi: 10.1049/cit2.v3.4 URL |
| [20] | YU H, YANG S, GU W H, et al. Baidu driving dataset and end-to-end reactive control model[C]//2017 IEEE Intelligent Vehicles Symposium (IV). Los Angeles, CA, USA: IEEE, 2017: 341-346. |
| [21] | BOJARSKI M, YERES P, CHOROMANSKA A, et al. Explaining how a deep neural network trained with end-to-end learning steers a car[EB/OL]. (2017-04-14) [2020-06-14]. https://www.researchgate.net/publication/316505624_Explaining_How_a_Deep_Neural_Network_Trained_with_End-to-End_Learning_Steers_a_Car . |
| [22] | IBERRAKEN D, ADOUANE L, DENIS D. Safe autonomous overtaking maneuver based on inter-vehicular distance prediction and multi-level Bayesian decision-making[C]//IEEE Conference on Intelligent Transportation Systems. Maui, HI, USA: IEEE, 2018: 18308831. |
| [23] | TRAM T, BATKOVIC I, ALI M, et al. Learning when to drive in intersections by combining reinforcement learning and model predictive control[C]//2019 IEEE Intelligent Transportation Systems Conference (ITSC). Auckland, New Zealand: IEEE, 2019: 19194092. |
| [24] | ORZECHOWSKI P F, BURGER C, LAUER M. Decision-making for automated vehicles using a hierarchical behavior-based arbitration scheme[C]//2020 IEEE Intelligent Vehicles Symposium (IV). Las Vegas, NV, USA: IEEE, 2020: 20286743. |
| [25] | WANG X, WU J Q, GU Y L, et al. Human-like maneuver decision using LSTM-CRF model for on-road self-driving[C]//2018 21st International Conference on Intelligent Transportation Systems (ITSC). Maui, HI, USA: IEEE, 2018: 210-216. |
| [26] | 成英, 高利, 陈雪梅, 等. 有人与无人驾驶车辆交叉口驾驶博弈模型[J]. 北京理工大学学报, 2019, 39(9):938-943. |
| CHENG Ying, GAO Li, CHEN Xuemei, et al. A driving game model for manned and unmanned vehicles at intersection[J]. Transactions of Beijing Institute of Technology, 2019, 39(9):938-943. | |
| [27] | CHEN Z L, HUANG X M. End-to-end learning for lane keeping of self-driving cars[C]//2017 IEEE Intelligent Vehicles Symposium (IV). Los Angeles, CA, USA: IEEE, 2017: 1856-1860. |
| [28] |
LI N, OYLER D W, ZHANG M X, et al. Game theoretic modeling of driver and vehicle interactions for verification and validation of autonomous vehicle control systems[J]. IEEE Transactions on Control Systems Technology, 2018, 26(5):1782-1797.
doi: 10.1109/TCST.87 URL |
| [29] | CUNNINGHAM A G, GALCERAN E, EUSTICE R M, et al. MPDM: Multipolicy decision-making in dynamic, uncertain environments for autonomous driving[C]//2015 IEEE International Conference on Robotics and Automation (ICRA). Seattle, WA, USA: IEEE, 2015: 1670-1677. |
| [30] | SCHWARTING W, PASCHEKA P. Recursive conflict resolution for cooperative motion planning in dynamic highway traffic[C]//17th International IEEE Conference on Intelligent Transportation Systems (ITSC). Qingdao: IEEE, 2014: 1039-1044. |
| [31] | LENZ D, KESSLER T, KNOLL A. Tactical cooperative planning for autonomous highway driving using Monte-Carlo Tree Search[C]//2016 IEEE Intelligent Vehicles Symposium (IV). Gothenburg, Sweden: IEEE, 2016: 447-453. |
| [32] | CUNNINGHAM A G, GALCERAN E, MEHTA D, et al. MPDM: Multi-policy decision-making from autonomous driving to social robot navigation[M]//WASCHL H, KOLMANOVSKY I, WILLEMS F. Control Strategies for Advanced Driver Assistance Systems and Autonomous Driving Functions. Berlin, Germany: Springer, 2019: 201-223. |
| [33] | CHEN J Y, TANG C, XIN L, et al. Continuous decision making for on-road autonomous driving under uncertain and interactive environments[C]//2018 IEEE Intelligent Vehicles Symposium (IV). Changshu: IEEE, 2018: 1651-1658. |
| [34] | WEI J Q, DOLAN J M, LITKOUHI B. Autonomous vehicle social behavior for highway entrance ramp management[C]//2013 IEEE Intelligent Vehicles Symposium (IV). Gold Coast, QLD, Australia: IEEE, 2013: 201-207. |
| [35] | HOERMANN S, STUMPER D, DIETMAYER K. Probabilistic long-term prediction for autonomous vehicles[C]//2017 IEEE Intelligent Vehicles Symposium (IV). Piscataway, NJ, USA: IEEE, 2017: 237-243. |
| [36] |
DING W C, ZHANG L, CHEN J, et al. Safe trajectory generation for complex urban environments using spatio-temporal semantic corridor[J]. IEEE Robotics and Automation Letters, 2019, 4(3):2997-3004.
doi: 10.1109/LSP.2016. URL |
| [37] | 武历颖. 无人驾驶汽车环境信息提取及运动决策方法研究[D]. 西安: 长安大学, 2016. |
| WU Liying. Research on environmental information extraction and movement decision-making method of unmanned vehicle[D]. Xi’an: Changan University, 2016. | |
| [38] | LEURENT E, MERCAT J. Social attention for autonomous decision-making in dense traffic[EB/OL]. (2019-11-27) [2020-06-14]. https://arxiv.org/abs/1911.12250 . |
| [39] | MEHTA A, SUBRAMANIAN A. Learning end-to-end autonomous driving using guided auxiliary supervision[EB/OL]. (2018-08-30) [2020-06-14]. https://www.researchgate.net/publication/327335968_Learning_End-to-end_Autonomous_Driving_using_Guided_Auxiliary_Supervision . |
| [40] | XU J X, LUO Q, XU K C, et al. An automated learning-based procedure for large-scale vehicle dynamics modeling on Baidu Apollo platform[C]//2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway, NJ, USA: IEEE, 2019: 5049-5056. |
| [41] | SUTTON R S, BARTO A G. Reinforcement learning: An introduction[J]. IEEE Transactions on Neural Networks, 1998, 9(5):1054. |
| [42] | PIETER A, ANDREW Y. Apprenticeship learning via inverse reinforcement learning[EB/OL]. (2004-09-01) [2020-06-14]. https://www.researchgate.net/publication/2947330_Apprenticeship_Learning_via_Inverse_Reinforcement_Learning . |
| [43] | BOJARSKI M, DEL TESTA D, DWORAKOWSKI D, et al. End to end learning for self-driving cars[EB/OL]. (2016-04-01)[2020-06-15]. https://www.researchgate.net/publication/301648615_End_to_End_Learning_for_Self-Driving_Cars . |
| [44] | XU H Z, GAO Y, YU F, et al. End-to-end learning of driving models from large-scale video datasets[C]//2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway, NJ, USA: IEEE, 2017: 3530-3538. |
| [45] | HECKER S, DAI D X, GOOL L. End-to-end learning of driving models with surround-view cameras and route planners[C]//European Conference on Computer Vision. Glasgow, UK: Springer, 2018: 449-468. |
| [46] | GAO Z H, SUN T J, XIAO H W. Decision-making method for vehicle longitudinal automatic driving based on reinforcement Q-learning[J]. International Journal of Advanced Robotic Systems, 2019, 16(3):172988141985318. |
| [47] |
YE Y J, ZHANG X H, SUN J. Automated vehicle’s behavior decision making using deep reinforcement learning and high-fidelity simulation environment[J]. Transportation Research Part C: Emerging Technologies, 2019, 107:155-170.
doi: 10.1016/j.trc.2019.08.011 URL |
| [48] | 郑睿. 基于增强学习的无人车辆智能决策方法研究[D]. 长沙: 国防科学技术大学, 2013. |
| ZHENG Rui. Reinforcement learning-based intelligent decision-making methods for unmanned vehicles[D]. Changsha: National University of Defense Technology, 2013. | |
| [49] | YUAN W, YANG M, HE Y S, et al. Multi-reward architecture based reinforcement learning for highway driving policies[C]//2019 IEEE Intelligent Transportation Systems Conference (ITSC). Auckland, New Zealand: IEEE, 2019: 19194107. |
| [50] | QIAO Z Q, MUELLING K, DOLAN J M, et al. Automatically generated curriculum based reinforcement learning for autonomous vehicles in urban environment[C]//2018 IEEE Intelligent Vehicles Symposium (IV). Piscataway, NJ, USA: IEEE, 2018: 1233-1238. |
| [51] | BOUTON M, NAKHAEI A, FUJIMURA K, et al. Cooperation-aware reinforcement learning for merging in dense traffic[C]//2019 IEEE Intelligent Transportation Systems Conference (ITSC). Changshu: IEEE, 2019: 3441-3447. |
| [52] | KAUSHIK M, PRASAD V, KRISHNA K M, et al. Overtaking maneuvers in simulated highway driving using deep reinforcement learning[C]//2018 IEEE Intelligent Vehicles Symposium (IV). Changshu: IEEE, 2018: 1885-1890. |
| [53] | FERDOWSI A, CHALLITA U, SAAD W, et al. Robust deep reinforcement learning for security and safety in autonomous vehicle systems[C]//2018 21st International Conference on Intelligent Transportation Systems (ITSC). Piscataway, NJ, USA: IEEE, 2018: 307-312. |
| [54] | MA X B, CAMPBELL D K, KOCHENDERFER M J. Improved robustness and safety for autonomous vehicle control with adversarial reinforcement learning[C]//2018 IEEE Intelligent Vehicles Symposium (IV). Changshu: IEEE, 2018: 18168097. |
| [55] | SHARIFZADEH S, CHIOTELLIS I, TRIEBEL R, et al. Learning to drive using inverse reinforcement learning and deep Q-networks[EB/OL]. (2016-12-12) [2020-06-14]. https://arxiv.org/abs/1612.03653 . |
| [56] | CHEN X L, MONFORT M, ZIEVART B D, et al. Adversarial inverse optimal control for general imitation learning losses and embodiment transfer[EB/OL]. (2016-06-01)[2020-06-14]. https://scholar.google.com.hk/scholar?hl=zh-CN&as_sdt=0%2C5&q=Adversarial+Inverse+Optimal+Control+for+General+Imitation+Learning+Losses+and+Embodiment+Transfer&btnG= . |
| [57] | MAJUMDAR A, SINGH S, MANDLEKAR A, et al. Risk-sensitive inverse reinforcement learning via coherent risk models[EB/OL]. [2020-06-14]. http://www.roboticsproceedings.org/rss13/p69.pdf . |
| [58] | WULFMEIER M, ONDRUSKA P, POSNER I. Maximum entropy deep inverse reinforcement learning[EB/OL]. (2015-07-17) [2020-06-14]. https://arxiv.org/abs/1507.04888 . |
| [59] | AHN H, BERNTORP K, DI CAIRANO S. Reachability-based decision making for city driving[C]//2018 Annual American Control Conference (ACC). Milwaukee, WI, USA: IEEE, 2018: 3203-3208. |
| [60] | BOUTON M, NAKHAEI A, FUJIMURA K, et al. Safe reinforcement learning with scene decomposition for navigating complex urban environments[C]//2019 IEEE Intelligent Vehicles Symposium (IV). Paris, France: IEEE, 2019: 1469-1476. |
| [61] | 陈雪梅, 田赓, 苗一松, 等. 城市环境下无人驾驶车辆驾驶规则获取及决策算法[J]. 北京理工大学学报, 2017, 37(5):491-496. |
| CHEN Xuemei, TIAN Geng, MIAO Yisong, et al. Driving rule acquisition and decision algorithm to unmanned vehicle in urban traffic[J]. Transactions of Beijing Institute of Technology, 2017, 37(5):491-496. | |
| [62] |
NISHI T, DOSHI P, PROKHOROV D. Merging in congested freeway traffic using multipolicy decision making and passive actor-critic learning[J]. IEEE Transactions on Intelligent Vehicles, 2019, 4(2):287-297.
doi: 10.1109/TIV URL |
| [63] | ALEXIADIS V, COLYAR J, HALKIAS J, et al. The next generation simulation program[J]. Institute of Transportation Engineers. ITE Journal, 2004, 74(8):22. |
| [64] | LI G, FANG S, MA J X, et al. Modeling merging acceleration and deceleration behavior based on gradient-boosting decision tree[J]. Journal of Transportation Engineering, Part A: Systems, 2020, 146(7):1-9. |
| [65] |
LI G, PAN Y Y, YANG Z, et al. Modeling vehicle merging position selection behaviors based on a finite mixture of linear regression models[J]. IEEE Access, 2019, 7:158445-158458.
doi: 10.1109/Access.6287639 URL |
| [66] | BIN AL ISLAM S M A, ABDUL AZIZ H M, HAJBABAIE A. Stochastic gradient-based optimal signal control with energy consumption bounds[EB/OL]. (2020-03-18) [2020-06-14]. https://scholar.google.com.hk/scholar?hl=zh-CN&as_sdt=0%2C5&q=Stochastic+Gradient-Based+Optimal+Signal+Control+With+Energy+Consumption+Bounds&btnG= . |
| [67] |
LI G, CHENG J. Exploring the effects of traffic density on merging behavior[J]. IEEE Access, 2019, 7:51608-51619.
doi: 10.1109/Access.6287639 URL |
| [68] | KRAJEWSKI R, BOCK J, KLOEKER L, et al. The highD dataset: A drone dataset of naturalistic vehicle trajectories on German highways for validation of highly automated driving systems[C]//2018 21st International Conference on Intelligent Transportation Systems (ITSC). Maui, HI, USA: IEEE, 2018: 18309040. |
| [69] | ZHAN W, SUN L, WANG D, et al. Interaction dataset: An international, adversarial and cooperative motion dataset in interactive driving scenarios with semantic maps[EB/OL]. (2019-09-30) [2020-06-14]. https://arxiv.org/abs/1910.03088 . |
| [70] | HOUSTON J, ZUIDHOF G, BERGAMINI L, et al. One thousand and one hours: Self-driving motion Prediction dataset[EB/OL]. (2020-06-25) [2020-08-14]. https://arxiv.org/abs/2006.14480 . |
| [71] | KIM H, KIM D, KIM G, et al. Multi-head attention based probabilistic vehicle trajectory prediction[C]//2020 IEEE Intelligent Vehicles Symposium (IV). Las Vegas, NV, USA: IEEE, 2020: 1720-1725. |
| [72] |
RUDENKO A, PALMIERI L, HERMAN M, et al. Human motion trajectory prediction: A survey[J]. The International Journal of Robotics Research, 2020, 39(8):895-935.
doi: 10.1177/0278364920917446 URL |
| [73] | ETESAMI J, GEIGER P. Causal transfer for imitation learning and decision making under sensor-shift[C]// Proceedings of the AAAI Conference on Artificial Intelligence, 2020, 34(6):10118-10125. |
| [74] | MESSAOUD K, YAHIAOUI I, VERROUST-BLONDET A, et al. Relational recurrent neural networks for vehicle trajectory prediction[C]//2019 IEEE Intelligent Transportation Systems Conference (ITSC). Auckland, New Zealand: IEEE, 2019: 19193897. |
| [75] | WANG X, NAIR S, ALTHOFF M. Falsification-based robust adversarial reinforcement learning[EB/OL]. (2020-07-01) [2020-06-14]. https://arxiv.org/abs/2007.00691 . |
| [76] | BHATTACHARYYA R P, SENANAYAKE R, BROWN K, et al. Online parameter estimation for human driver behavior prediction[C]//2020 American Control Conference (ACC). Denver, CO, USA: IEEE, 2020: 19830660. |
| [77] | QIAO Z Q, ZHAO J, ZHU J, et al. Human driver behavior prediction based on UrbanFlow[C]//2020 IEEE International Conference on Robotics and Automation (ICRA). Paris, France: IEEE, 2020: 10570-10576. |
| [78] |
MESSAOUD K, YAHIAOUI I, VERROUST-BLONDET A, et al. Attention based vehicle trajectory prediction[J]. IEEE Transactions on Intelligent Vehicles, 2021, 6(1):175-185.
doi: 10.1109/TIV URL |
| [79] | SUN L T, ZHAN W, HU Y P, et al. Interpretable modelling of driving behaviors in interactive driving scenarios based on cumulative prospect theory[C]//2019 IEEE Intelligent Transportation Systems Conference (ITSC). Auckland, New Zealand: IEEE, 2019: 4329-4335. |
| [80] | HU Y P, ZHAN W, TOMIZUKA M. Scenario-transferable semantic graph reasoning for interaction-aware probabilistic prediction[EB/OL]. (2020-04-01)[2020-06-14]. https://www.researchgate.net/publication/340500370_Scenario-Transferable_Semantic_Graph_Reasoning_for_Interaction-Aware_Probabilistic_Prediction . |
| [81] | SHU K Q, YU H L, CHEN X X, et al. Autonomous driving at intersections: A critical-turning-point approach for left turns[C]//2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC). Rhodes, Greece: IEEE, 2020: 1-6. |
| [82] | SHU K, YU H L, CHEN X X, et al. Autonomous driving at intersections: A critical-turning-point approach for left turns[C]//2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC). Rhodes, Greece: IEEE, 2020: 20303092. |
| [83] |
FENG D, HAASE-SCHÜTZ C, ROSENBAUM L, et al. Deep multi-modal object detection and semantic segmentation for autonomous driving: Datasets, methods, and challenges[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(3):1341-1360.
doi: 10.1109/TITS.6979 URL |
| [84] | CHANDRA R, GUAN T, PANUGANTI S, et al. Forecasting trajectory and behavior of road-agents using spectral clustering in graph-LSTMs[J]. IEEE Robotics and Automation Letters, 2020, 5(3):19741183. |
| [85] | SALZMANN T, IVANOVIC B, CHAKRAVARTY P, et al. Trajectron++: Dynamically-feasible trajectory forecasting with heterogeneous data[C]//European Conference on Computer Vision-ECCV 2020. Glasgow, UK: Springer, 2020: 683-700. |
| [86] | GADD M, DE MARTINI D, MARCHEGIANI L, et al. Sense-assess-eXplain (SAX): Building trust in autonomous vehicles in challenging real-world driving scenarios[C]//2020 IEEE Intelligent Vehicles Symposium (IV). Las Vegas, NV, USA: IEEE, 2020: 150-155. |
| [1] | . 合成数据驱动的无人机检测与分类多任务框架[J]. J Shanghai Jiaotong Univ Sci, 2026, 31(1): 209-220. |
| [2] | 王宝坤, 王如路, 陈锦剑, 潘越, 王鲁杰. 基于深度学习的盾构隧道表观病害自动检测方法[J]. 上海交通大学学报, 2024, 58(11): 1716-1723. |
| [3] | 赖国良, 胡钊政, 周哲, 万金杰, 任靖渊. 基于语义似然与高精度地图匹配的智能车辆同时定位与检测[J]. 上海交通大学学报, 2024, 58(10): 1618-1628. |
| [4] | 侯良生,张均东. 数据集偏差情况下滚动轴承的故障诊断[J]. J Shanghai Jiaotong Univ Sci, 2023, 28(5): 638-651. |
| [5] | 林淳, 贺越生, 方兴其, 王春香. 一种面向泊车场景智能车辆轨迹规划方法[J]. 上海交通大学学报, 2023, 57(3): 345-353. |
| [6] | 郭俊锋, 王淼生, 王智明. 基于对不平衡数据集进行二次迁移学习的滚动轴承剥落类故障诊断方法[J]. 上海交通大学学报, 2023, 57(11): 1512-1521. |
| [7] | 黄鹤, 熊武, 吴琨, 王会峰, 茹锋, 王珺. 基于记忆传递旗鱼优化的K均值混合迭代聚类[J]. 上海交通大学学报, 2022, 56(12): 1638-1648. |
| [8] | 胡益恺, 庄瀚洋, 王春香, 杨明. 基于主从博弈的智能车汇流场景决策方法[J]. 上海交通大学学报, 2021, 55(8): 1027-1034. |
| [9] | 郑德重, 杨媛媛, 谢哲, 倪扬帆, 李文涛. 基于Gaussian混合的距离度量学习数据划分方法[J]. 上海交通大学学报, 2021, 55(2): 131-140. |
| [10] | 王树凤,张钧鑫,张俊友. 基于人工势场和虚拟领航者的智能车辆编队控制[J]. 上海交通大学学报, 2020, 54(3): 305-311. |
| [11] | 伍舜喜,杨明. 基于自然柱状特征地图的智能车定位[J]. 上海交通大学学报(自然版), 2008, 42(10): 1745-1748. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||