上海交通大学学报 ›› 2021, Vol. 55 ›› Issue (8): 1027-1034.doi: 10.16183/j.cnki.jsjtu.2020.319
所属专题: 《上海交通大学学报》2021年12期专题汇总专辑; 《上海交通大学学报》2021年“自动化技术、计算机技术”专题
胡益恺a,c, 庄瀚洋b,c( ), 王春香a,c, 杨明a,b,c
), 王春香a,c, 杨明a,b,c
收稿日期:2020-10-09
出版日期:2021-08-28
发布日期:2021-08-31
通讯作者:
庄瀚洋
E-mail:zhuanghany11@sjtu.edu.cn
作者简介:胡益恺(1996-),男,安徽省合肥市人,硕士生,主要研究方向为机器人
基金资助:
HU Yikaia,c, ZHUANG Hanyangb,c(), WANG Chunxianga,c, YANG Minga,b,c
Received:2020-10-09
Online:2021-08-28
Published:2021-08-31
Contact:
ZHUANG Hanyang
E-mail:zhuanghany11@sjtu.edu.cn
摘要:
现有智能车决策方法未考虑路权信息、车辆礼貌驾驶以及车辆有限感知范围等因素,容易导致汇流时的安全隐患.针对该类问题,提出一种基于主从博弈的智能车辆决策方法.该方法通过构建结合路权的博弈模型,对汇流场景进行参数化建模,再引入合作因子等目标项设计相应的收益函数,最终设计汇流场景中的车辆决策求解框架,以达到该场景下决策收益的最大值.实验结果表明,所提方法能够提高在数据集上的车辆决策行为预测准确率,并能提高车辆在高车流密度环境中的决策稳健性.
中图分类号:
胡益恺, 庄瀚洋, 王春香, 杨明. 基于主从博弈的智能车汇流场景决策方法[J]. 上海交通大学学报, 2021, 55(8): 1027-1034.
HU Yikai, ZHUANG Hanyang, WANG Chunxiang, YANG Ming. Stackelberg-Game-Based Intelligent Vehicle Decision Method for Merging Scenarios[J]. Journal of Shanghai Jiao Tong University, 2021, 55(8): 1027-1034.
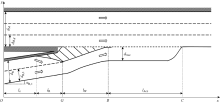
图1
汇流场景参数化建模
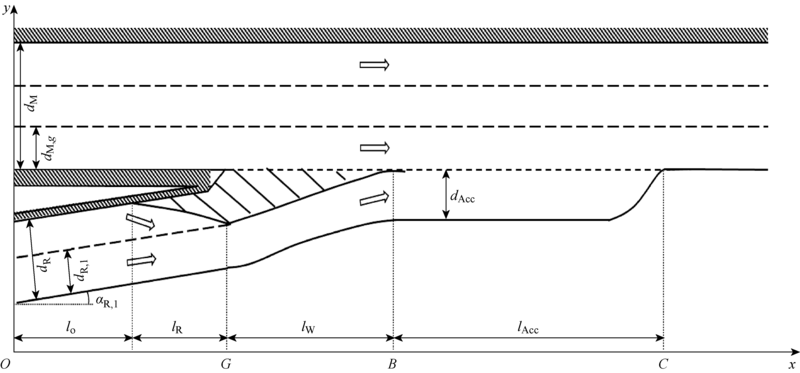

图2
汇流场景中的车辆轨迹模型
图3
车辆安全收益几何模型
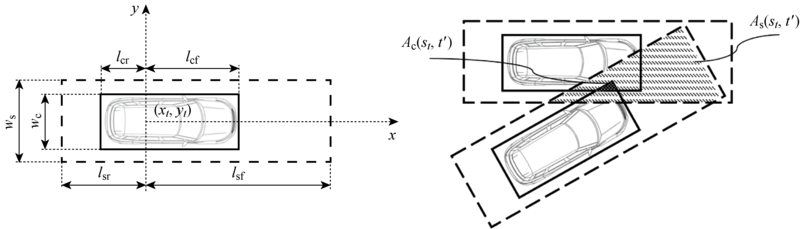
图4
面向汇流场景的决策方法流程图
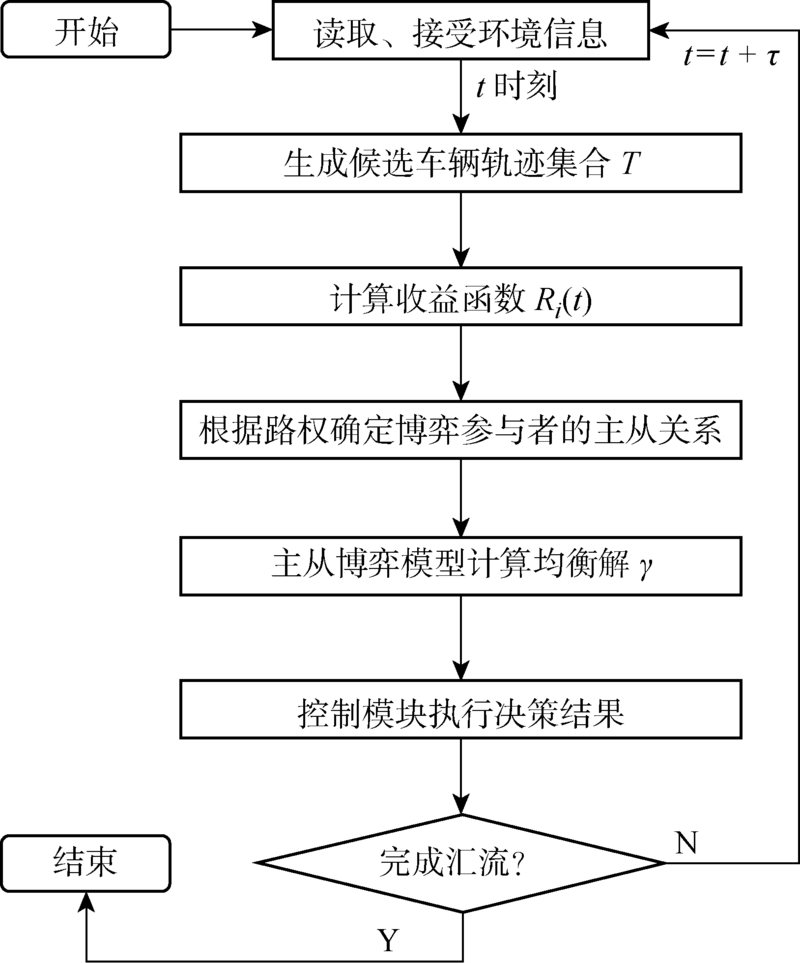
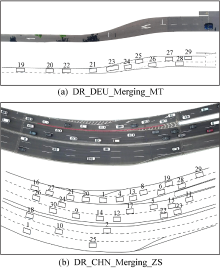
图5
INTERACTION 数据集
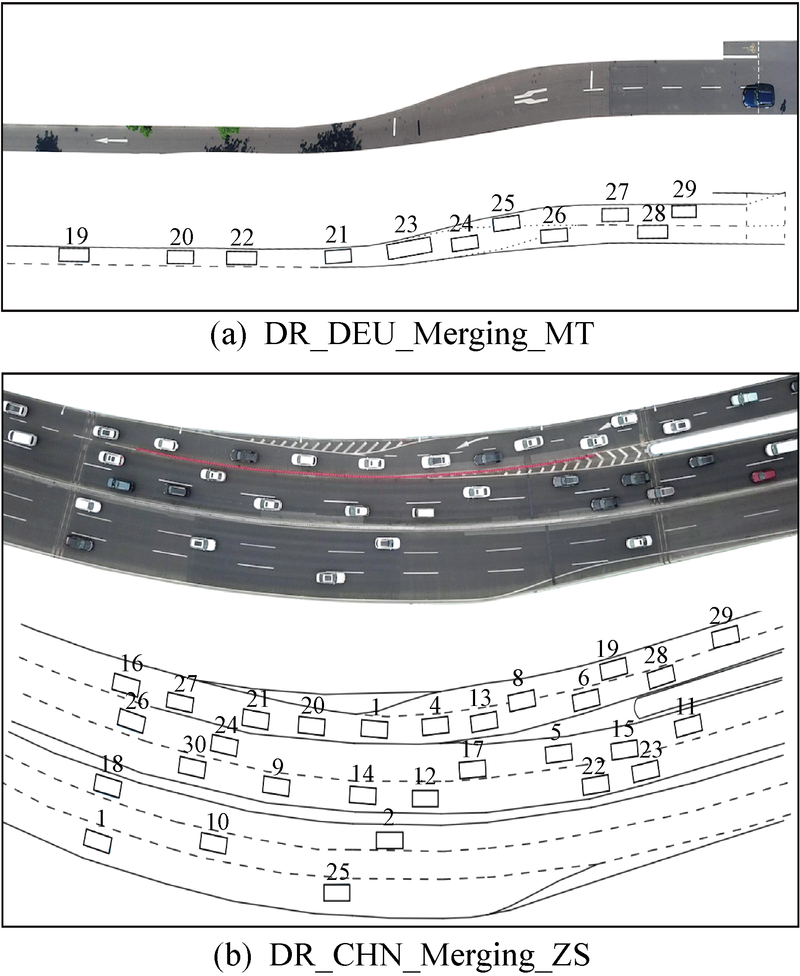
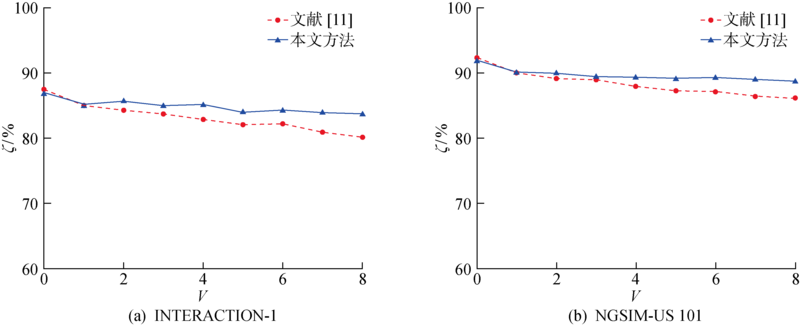
表1
决策方法行为预测准确率及其 MAE
| 数据集 | ζ/ % | MAE/(m·s-1) | |||
|---|---|---|---|---|---|
| 本文方法 | 文献[ | 本文方法 | 文献[ | ||
| INTERACTION-1 | 85.5 | 82.7 | 0.27 | 0.61 | |
| INTERACTION-2 | 84.1 | 82.4 | 0.36 | 0.75 | |
| NGSIM-US 101 | 89.2 | 89.6 | 0.50 | 0.83 | |
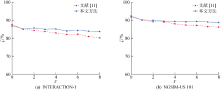
图6
行为预测准确率与车流量关系
| [1] | 胡兵, 杨明, 郭林栋, 等. 基于地面快速鲁棒特征的智能车全局定位方法[J]. 上海交通大学学报, 2019, 53(2):203-208. |
| HU Bing, YANG Ming, GUO Lindong, et al. Global localization for intelligent vehicles using ground SURF[J]. Journal of Shanghai Jiao Tong University, 2019, 53(2):203-208. | |
| [2] | DE CAMPOS G R, FALCONE P, SJÖBERG J. Autonomous cooperative driving: A velocity-based negotiation approach for intersection crossing[C]//16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013). The Hague, Netherlands: IEEE, 2013: 1456-1461. |
| [3] |
AHMANE M, ABBAS-TURKI A, PERRONNET F, et al. Modeling and controlling an isolated urban intersection based on cooperative vehicles[J]. Transportation Research Part C: Emerging Technologies, 2013, 28:44-62.
doi: 10.1016/j.trc.2012.11.004 URL |
| [4] | WANG Z R, WU G Y, BARTH M. Distributed consensus-based cooperative highway on-ramp merging using V2X communications[EB/OL]. (2018-04-03) [2020-06-14]. https://saemobilus.sae.org/content/2018-01-1177/ . |
| [5] |
WU J, ABBAS-TURKI A, EL MOUDNI A. Cooperative driving: An ant colony system for autonomous intersection management[J]. Applied Intelligence, 2012, 37(2):207-222.
doi: 10.1007/s10489-011-0322-z URL |
| [6] |
LEE J, PARK B. Development and evaluation of a cooperative vehicle intersection control algorithm under the connected vehicles environment[J]. IEEE Transactions on Intelligent Transportation Systems, 2012, 13(1):81-90.
doi: 10.1109/TITS.2011.2178836 URL |
| [7] |
ALTHOFF M, STURSBERG O, BUSS M. Model-based probabilistic collision detection in autonomous driving[J]. IEEE Transactions on Intelligent Transportation Systems, 2009, 10(2):299-310.
doi: 10.1109/TITS.2009.2018966 URL |
| [8] | YUAN W, YANG M, HE Y S, et al. Multi-reward architecture based reinforcement learning for highway driving policies[C]//2019 IEEE Intelligent Transportation Systems Conference (ITSC). Auckland, New Zealand: IEEE, 2019: 3810-3815. |
| [9] | CHEN J Y, TANG C, XIN L, et al. Continuous decision making for on-road autonomous driving under uncertain and interactive environments[C]//2018 IEEE Intelligent Vehicles Symposium (IV). Changshu: IEEE, 2018: 1651-1658. |
| [10] | LEURENT E, MERCAT J. Social attention for autonomous decision-making in dense traffic[EB/OL]. (2019-11-27) [2020-06-14]. https://arxiv.org/abs/1911.12250 . |
| [11] |
KANG K, RAKHA H A. A repeated game freeway lane changing model[J]. Sensors, 2020, 20(6):1554.
doi: 10.3390/s20061554 URL |
| [12] |
YU H T, TSENG H E, LANGARI R. A human-like game theory-based controller for automatic lane changing[J]. Transportation Research Part C: Emerging Technologies, 2018, 88:140-158.
doi: 10.1016/j.trc.2018.01.016 URL |
| [13] |
DREVES A, GERDTS M. A generalized Nash equilibrium approach for optimal control problems of autonomous cars[J]. Optimal Control Applications and Methods, 2018, 39(1):326-342.
doi: 10.1002/oca.v39.1 URL |
| [14] | 杜继永, 张凤鸣, 毛红保, 等. 多UAV协同搜索的博弈论模型及快速求解方法[J]. 上海交通大学学报, 2013, 47(4):667-673. |
| DU Jiyong, ZHANG Fengming, MAO Hongbao, et al. Game theory based multi-UAV cooperative searching model and fast solution approach[J]. Journal of Shanghai Jiao Tong University, 2013, 47(4):667-673. | |
| [15] | BAŞAR T, OLSDER G J. Dynamic noncooperative game theory[EB/OL].[2020-06-14]. https://epubs.siam.org/doi/book/10.1137/1.9781611971132 . |
| [16] | LI N, YAO Y, KOLMANOVSKY I, et al. Game-theoretic modeling of multi-vehicle interactions at uncontrolled intersections[EB/OL].[2020-06-14]. https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=9214866 . |
| [17] |
YOO J, LANGARI R. A predictive perception model and control strategy for collision-free autonomous driving[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(11):4078-4091.
doi: 10.1109/TITS.6979 URL |
| [18] | LUCA A, ORIOLO G, SAMSON C. Feedback control of a nonholonomic car-like robot[M]//LAUMOND J P. Robot Motion Planning and Control. Berlin, Germany: Springer, 1998. |
| [19] |
MURRAY R M, SASTRY S S. Nonholonomic motion planning: Steering using sinusoids[J]. IEEE Transactions on Automatic Control, 1993, 38(5):700-716.
doi: 10.1109/9.277235 URL |
| [20] | ZHAN W, SUN L T, WANG D, et al. INTERACTION dataset: An INTERnational, adversarial and cooperative moTION dataset in interactive driving scenarios with semantic maps[EB/OL]. (2019-09-01) [2020-06-14]. https://www.researchgate.net/publication/336413639_INTERACTION_Dataset_An_INTERnational_Adversarial_and_Cooperative_moTION_Dataset_in_Interactive_Driving_Scenarios_with_Semantic_Maps . |
| [21] | ALEXIADIS V, COLYAR J, HALKIAS J, et al. The next generation simulation program[J]. Institute of Transportation Engineers. ITE Journal, 2004, 74(8):22. |
| [1] | 白云洁, 谢开贵, 邵常政, 胡博. 梯级水电上下游区域风光水火联盟的博弈优化调度[J]. 上海交通大学学报, 2026, 60(2): 224-234. |
| [2] | 刘东林, 周霞, 戴剑丰, 解相朋, 汤奕, 李隽诗. 考虑虚拟储能的建筑综合能源系统双层优化调度策略[J]. 上海交通大学学报, 2026, 60(1): 61-73. |
| [3] | 胡龙, 方八零, 樊飞龙, 陈达伟, 李新喜, 曾润. 用户-基站-充电站能量互动和储能共享优化方法[J]. 上海交通大学学报, 2025, 59(7): 877-888. |
| [4] | 娄为, 胡蓉, 于谨铭, 张希鹏, 樊飞龙, 刘嵩源. 内嵌市场博弈模型的电网-抽水蓄能多主体协调调度[J]. 上海交通大学学报, 2025, 59(3): 365-375. |
| [5] | 陈子杰, 宋柄兵, 李语桐, 王利峰, 滕晓毕, 严正, 陈思捷. 面向现货市场的省间联络线功率考核机制与模型[J]. 上海交通大学学报, 2025, 59(12): 1773-1783. |
| [6] | . 《海岸工程水文学》简介[J]. 海洋工程装备与技术, 2014, 1(2): 183-183. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||