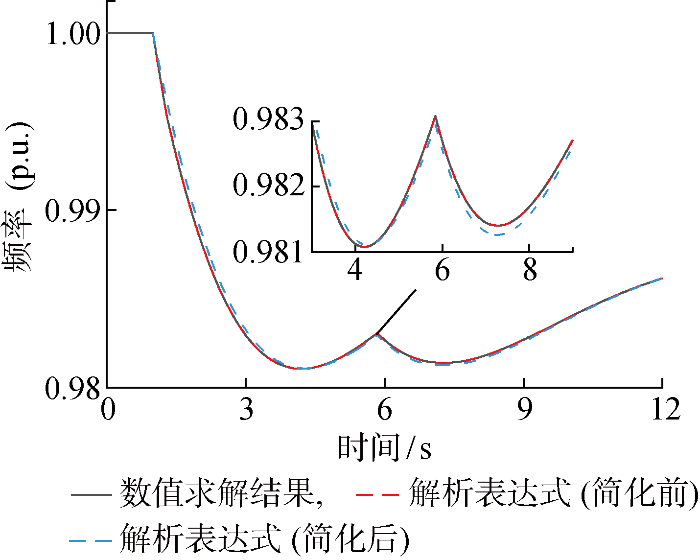
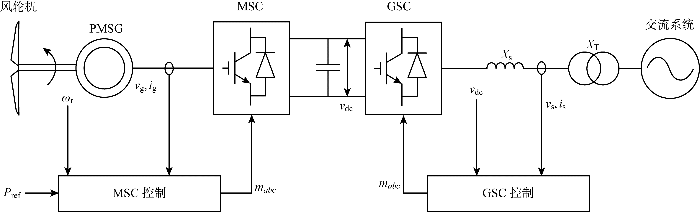
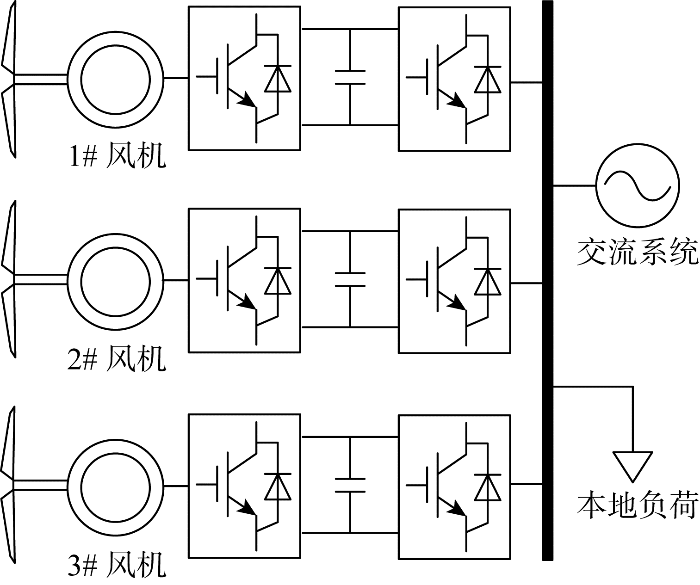
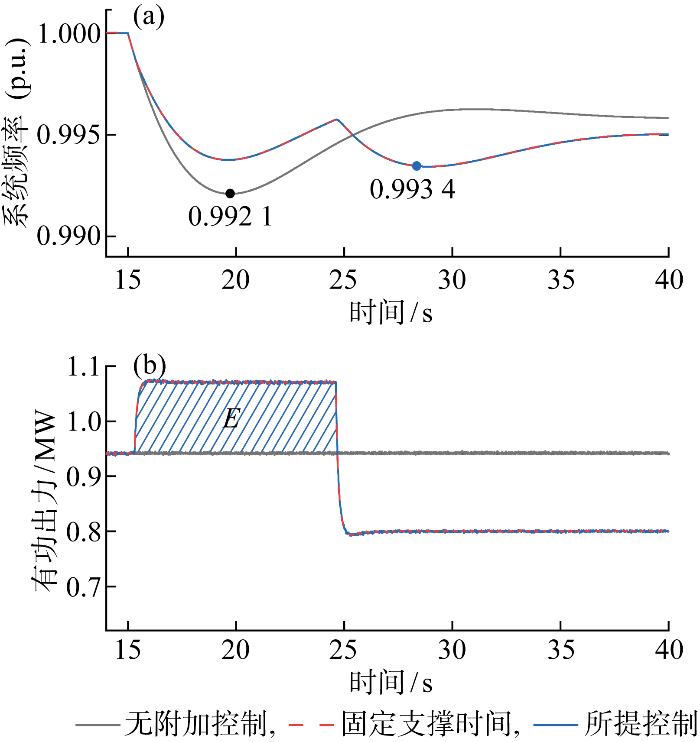
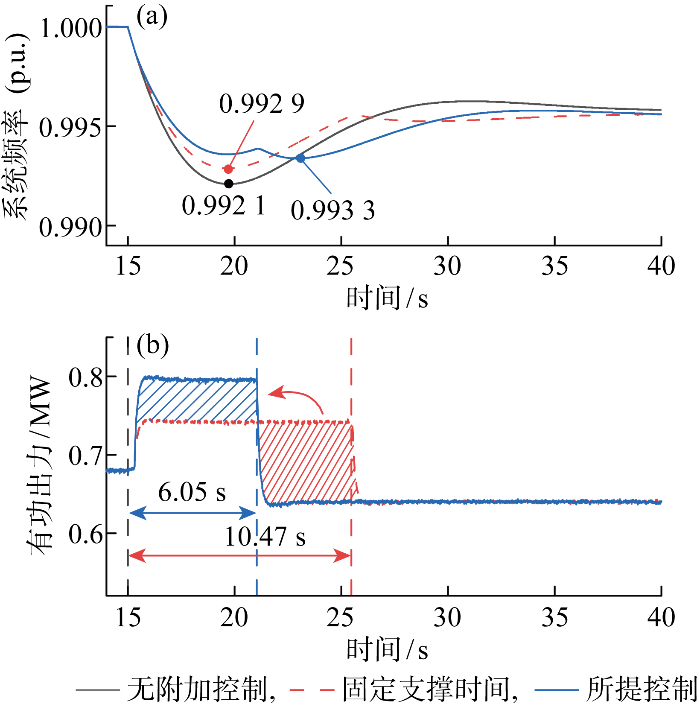
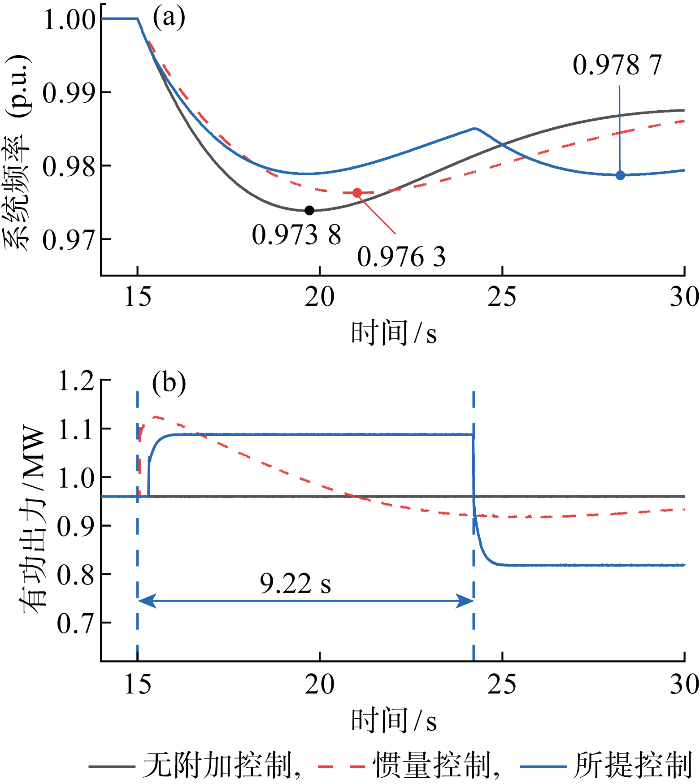
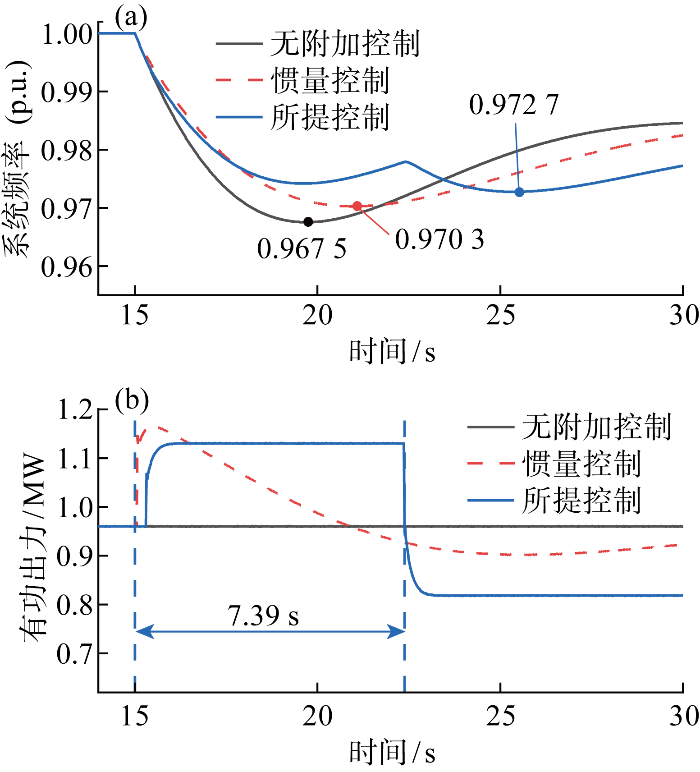
Converter interfaced power sources have the advantages of flexible and fast response, and the kinetic energy can be released to provide fast system frequency support. However, most of the existing control strategies neglect quantitative analysis of how control strategies affect the frequency nadir, and fail to effectively enhance the frequency nadir under different conditions. Aimed at improving the system frequency nadir, a frequency support strategy based on step power control is proposed. First, the system frequency response under step power control is analyzed, and analytical expressions for the two frequency nadirs following the disturbance are derived. Then, the optimal reference of power step control is determined by considering the kinetic energy which can be released by each wind turbine generator, and a coordinated distribution of the additional power is realized based on these expressions. Finally, a test system is implemented by using MATLAB/Simulink to verify the proposed strategy in numerical simulation.
Keywords:system frequency response;
permanent magnet synchronous generator (PMSG);
primary frequency regulation;
step power control
WU Shuangxi, LI Wenbo, QIN Yingjie, YAN Binjie, LI Jiapeng, LI Yujun. Quantization and Enhancement of System Frequency Nadir in Power Step Control[J]. Journal of Shanghai Jiaotong University, 2025, 59(6): 857-866 doi:10.16183/j.cnki.jsjtu.2023.363
近年来,风力发电因清洁无污染、资源丰富、利于大规模开发等优点受到广泛关注,其渗透率稳步提升[1-3].2021年,全球新增风电装机容量超过90 GW,其中,中国新增装机容量55.92 GW,位列世界第一[4].为了尽可能利用捕获的风能,风力发电机(风机)通常工作在最大功率点跟踪(maximum power point tracking, MPPT)状态,导致风机的出力与电网频率解耦,无法为交流系统提供频率和惯量支撑[5];当系统遭受严重干扰时,可能出现暂态频率越界.2015年,中国锦苏直流发生双极闭锁,在故障发生的12 s后,华东电网频率最低跌至49.56 Hz,系统频率在扰动后越限[6].大规模新能源发电接入为电力系统频率稳定带来新挑战[7].
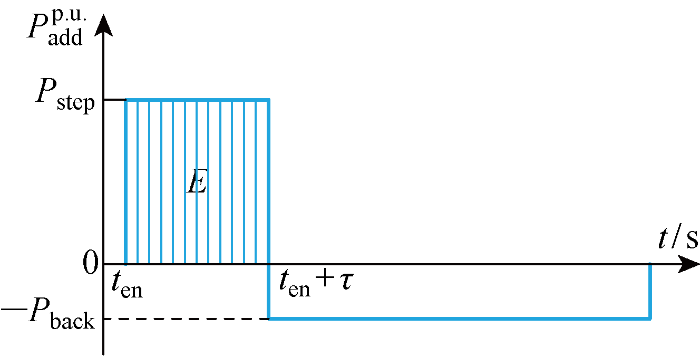
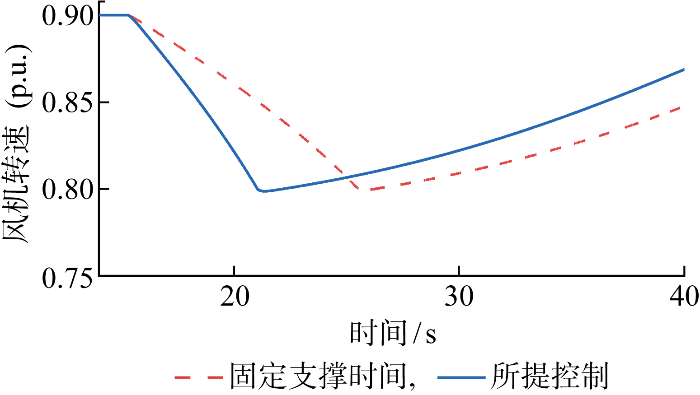
为改善系统的频率动态特性,国内外电网运行规程要求风力发电具备一定的频率支撑能力.现有方法按照调频的能量来源大体上可分为储能和转子动能两种.文献[8]中提出一种分级协调利用风轮机转子动能和机头换流器直流电容储能的惯量控制策略.类似地,文献[9]中同时利用转子动能和电容储能为岸上系统提供惯量支撑,并通过在岸上换流器上附加功率-电压辅助控制对虚拟惯量控制造成的输出功率降低进行补偿.此外,也有文献研究了风机与电池储能系统协同参与的频率控制策略[10-11].虚拟惯量控制能够有效改善系统的最大频率变化率,对系统频率最低点改善效果有限.为此,文献[12]中结合下垂和虚拟惯量控制,在抑制频率变化率的同时,有效抬升了系统的频率最低点;文献[13]中进一步结合系统频率响应模型,分析评估综合惯量控制下风机能够为系统提供的等值惯量大小.然而,惯量控制通常需要通过最大的频率扰动来选定控制参数,在一般扰动下不能充分利用调频资源.为此,文献[14]中最早提出一种固定附加功率和支撑时间的频率支撑控制,这种方法在功率扰动发生后立刻抬升风机有功出力,并维持一段时间以为系统提供频率支撑.这一方法会造成频率的二次跌落(secondary frequency drop,SFD),不恰当的参数设置可能会导致严重的二次跌落,总体的频率最低点甚至较风机不参与调频时更低.针对这一问题,文献[15]、文献[16-18]中分别通过为各风机设置不同的支撑时间、耦合附加功率参考值与风机转速来平滑风机出力变化,有效抑制了SFD.这类方法需要参数设置适当才能更好地发挥作用,但实际应用时控制参数的选择较为复杂[19].
系统频率响应(system frequency response, SFR)模型,最早由Anderson等[27]提出.该模型将多机系统频率响应聚合等效为阶数较低的单台调速器响应,从而简化系统频率分析和频率控制器设计,在电力系统频率分析中应用广泛[13,19,28-29].简化SFR模型进一步忽略两个很小的时间常数[27],在机电暂态尺度仍具有较高的计算精度,该模型的传递函数可表示为
... 近年来,风力发电因清洁无污染、资源丰富、利于大规模开发等优点受到广泛关注,其渗透率稳步提升[1-3].2021年,全球新增风电装机容量超过90 GW,其中,中国新增装机容量55.92 GW,位列世界第一[4].为了尽可能利用捕获的风能,风力发电机(风机)通常工作在最大功率点跟踪(maximum power point tracking, MPPT)状态,导致风机的出力与电网频率解耦,无法为交流系统提供频率和惯量支撑[5];当系统遭受严重干扰时,可能出现暂态频率越界.2015年,中国锦苏直流发生双极闭锁,在故障发生的12 s后,华东电网频率最低跌至49.56 Hz,系统频率在扰动后越限[6].大规模新能源发电接入为电力系统频率稳定带来新挑战[7]. ...
An overview on key technologies regarding power transmission and grid integration of large scale offshore wind power
1
2016
... 近年来,风力发电因清洁无污染、资源丰富、利于大规模开发等优点受到广泛关注,其渗透率稳步提升[1-3].2021年,全球新增风电装机容量超过90 GW,其中,中国新增装机容量55.92 GW,位列世界第一[4].为了尽可能利用捕获的风能,风力发电机(风机)通常工作在最大功率点跟踪(maximum power point tracking, MPPT)状态,导致风机的出力与电网频率解耦,无法为交流系统提供频率和惯量支撑[5];当系统遭受严重干扰时,可能出现暂态频率越界.2015年,中国锦苏直流发生双极闭锁,在故障发生的12 s后,华东电网频率最低跌至49.56 Hz,系统频率在扰动后越限[6].大规模新能源发电接入为电力系统频率稳定带来新挑战[7]. ...
计及储能调节的时滞互联电力系统频率控制
0
2022
Frequency control strategy for interconnected power systems with time delay considering optimal energy storage regulation
0
2022
含风电虚拟惯性响应的新能源电力系统惯量估计
1
2023
... 近年来,风力发电因清洁无污染、资源丰富、利于大规模开发等优点受到广泛关注,其渗透率稳步提升[1-3].2021年,全球新增风电装机容量超过90 GW,其中,中国新增装机容量55.92 GW,位列世界第一[4].为了尽可能利用捕获的风能,风力发电机(风机)通常工作在最大功率点跟踪(maximum power point tracking, MPPT)状态,导致风机的出力与电网频率解耦,无法为交流系统提供频率和惯量支撑[5];当系统遭受严重干扰时,可能出现暂态频率越界.2015年,中国锦苏直流发生双极闭锁,在故障发生的12 s后,华东电网频率最低跌至49.56 Hz,系统频率在扰动后越限[6].大规模新能源发电接入为电力系统频率稳定带来新挑战[7]. ...
Inertia estimation of new energy power system with virtual inertia response of wind power
1
2023
... 近年来,风力发电因清洁无污染、资源丰富、利于大规模开发等优点受到广泛关注,其渗透率稳步提升[1-3].2021年,全球新增风电装机容量超过90 GW,其中,中国新增装机容量55.92 GW,位列世界第一[4].为了尽可能利用捕获的风能,风力发电机(风机)通常工作在最大功率点跟踪(maximum power point tracking, MPPT)状态,导致风机的出力与电网频率解耦,无法为交流系统提供频率和惯量支撑[5];当系统遭受严重干扰时,可能出现暂态频率越界.2015年,中国锦苏直流发生双极闭锁,在故障发生的12 s后,华东电网频率最低跌至49.56 Hz,系统频率在扰动后越限[6].大规模新能源发电接入为电力系统频率稳定带来新挑战[7]. ...
2021年全球新增风电装机93.6 GW
1
2022
... 近年来,风力发电因清洁无污染、资源丰富、利于大规模开发等优点受到广泛关注,其渗透率稳步提升[1-3].2021年,全球新增风电装机容量超过90 GW,其中,中国新增装机容量55.92 GW,位列世界第一[4].为了尽可能利用捕获的风能,风力发电机(风机)通常工作在最大功率点跟踪(maximum power point tracking, MPPT)状态,导致风机的出力与电网频率解耦,无法为交流系统提供频率和惯量支撑[5];当系统遭受严重干扰时,可能出现暂态频率越界.2015年,中国锦苏直流发生双极闭锁,在故障发生的12 s后,华东电网频率最低跌至49.56 Hz,系统频率在扰动后越限[6].大规模新能源发电接入为电力系统频率稳定带来新挑战[7]. ...
In 2021, the installed capacity of new wind power in the world was 93.6 GW
1
2022
... 近年来,风力发电因清洁无污染、资源丰富、利于大规模开发等优点受到广泛关注,其渗透率稳步提升[1-3].2021年,全球新增风电装机容量超过90 GW,其中,中国新增装机容量55.92 GW,位列世界第一[4].为了尽可能利用捕获的风能,风力发电机(风机)通常工作在最大功率点跟踪(maximum power point tracking, MPPT)状态,导致风机的出力与电网频率解耦,无法为交流系统提供频率和惯量支撑[5];当系统遭受严重干扰时,可能出现暂态频率越界.2015年,中国锦苏直流发生双极闭锁,在故障发生的12 s后,华东电网频率最低跌至49.56 Hz,系统频率在扰动后越限[6].大规模新能源发电接入为电力系统频率稳定带来新挑战[7]. ...
柔性直流输电系统控制研究综述
1
2016
... 近年来,风力发电因清洁无污染、资源丰富、利于大规模开发等优点受到广泛关注,其渗透率稳步提升[1-3].2021年,全球新增风电装机容量超过90 GW,其中,中国新增装机容量55.92 GW,位列世界第一[4].为了尽可能利用捕获的风能,风力发电机(风机)通常工作在最大功率点跟踪(maximum power point tracking, MPPT)状态,导致风机的出力与电网频率解耦,无法为交流系统提供频率和惯量支撑[5];当系统遭受严重干扰时,可能出现暂态频率越界.2015年,中国锦苏直流发生双极闭锁,在故障发生的12 s后,华东电网频率最低跌至49.56 Hz,系统频率在扰动后越限[6].大规模新能源发电接入为电力系统频率稳定带来新挑战[7]. ...
Control strategies of voltage source converter based direct current transmission system
1
2016
... 近年来,风力发电因清洁无污染、资源丰富、利于大规模开发等优点受到广泛关注,其渗透率稳步提升[1-3].2021年,全球新增风电装机容量超过90 GW,其中,中国新增装机容量55.92 GW,位列世界第一[4].为了尽可能利用捕获的风能,风力发电机(风机)通常工作在最大功率点跟踪(maximum power point tracking, MPPT)状态,导致风机的出力与电网频率解耦,无法为交流系统提供频率和惯量支撑[5];当系统遭受严重干扰时,可能出现暂态频率越界.2015年,中国锦苏直流发生双极闭锁,在故障发生的12 s后,华东电网频率最低跌至49.56 Hz,系统频率在扰动后越限[6].大规模新能源发电接入为电力系统频率稳定带来新挑战[7]. ...
“9·19” 锦苏直流双极闭锁事故华东电网频率特性分析及思考
1
2017
... 近年来,风力发电因清洁无污染、资源丰富、利于大规模开发等优点受到广泛关注,其渗透率稳步提升[1-3].2021年,全球新增风电装机容量超过90 GW,其中,中国新增装机容量55.92 GW,位列世界第一[4].为了尽可能利用捕获的风能,风力发电机(风机)通常工作在最大功率点跟踪(maximum power point tracking, MPPT)状态,导致风机的出力与电网频率解耦,无法为交流系统提供频率和惯量支撑[5];当系统遭受严重干扰时,可能出现暂态频率越界.2015年,中国锦苏直流发生双极闭锁,在故障发生的12 s后,华东电网频率最低跌至49.56 Hz,系统频率在扰动后越限[6].大规模新能源发电接入为电力系统频率稳定带来新挑战[7]. ...
Analysis and reflection on frequency characteristics of East China grid after bipolar locking of “9·19” Jinping-Sunan DC transmission line
1
2017
... 近年来,风力发电因清洁无污染、资源丰富、利于大规模开发等优点受到广泛关注,其渗透率稳步提升[1-3].2021年,全球新增风电装机容量超过90 GW,其中,中国新增装机容量55.92 GW,位列世界第一[4].为了尽可能利用捕获的风能,风力发电机(风机)通常工作在最大功率点跟踪(maximum power point tracking, MPPT)状态,导致风机的出力与电网频率解耦,无法为交流系统提供频率和惯量支撑[5];当系统遭受严重干扰时,可能出现暂态频率越界.2015年,中国锦苏直流发生双极闭锁,在故障发生的12 s后,华东电网频率最低跌至49.56 Hz,系统频率在扰动后越限[6].大规模新能源发电接入为电力系统频率稳定带来新挑战[7]. ...
Primary frequency regulation by deloaded wind turbines using variable droop
1
2013
... 近年来,风力发电因清洁无污染、资源丰富、利于大规模开发等优点受到广泛关注,其渗透率稳步提升[1-3].2021年,全球新增风电装机容量超过90 GW,其中,中国新增装机容量55.92 GW,位列世界第一[4].为了尽可能利用捕获的风能,风力发电机(风机)通常工作在最大功率点跟踪(maximum power point tracking, MPPT)状态,导致风机的出力与电网频率解耦,无法为交流系统提供频率和惯量支撑[5];当系统遭受严重干扰时,可能出现暂态频率越界.2015年,中国锦苏直流发生双极闭锁,在故障发生的12 s后,华东电网频率最低跌至49.56 Hz,系统频率在扰动后越限[6].大规模新能源发电接入为电力系统频率稳定带来新挑战[7]. ...
Advanced control strategies of PMSG-based wind turbines for system inertia support
1
2017
... 为改善系统的频率动态特性,国内外电网运行规程要求风力发电具备一定的频率支撑能力.现有方法按照调频的能量来源大体上可分为储能和转子动能两种.文献[8]中提出一种分级协调利用风轮机转子动能和机头换流器直流电容储能的惯量控制策略.类似地,文献[9]中同时利用转子动能和电容储能为岸上系统提供惯量支撑,并通过在岸上换流器上附加功率-电压辅助控制对虚拟惯量控制造成的输出功率降低进行补偿.此外,也有文献研究了风机与电池储能系统协同参与的频率控制策略[10-11].虚拟惯量控制能够有效改善系统的最大频率变化率,对系统频率最低点改善效果有限.为此,文献[12]中结合下垂和虚拟惯量控制,在抑制频率变化率的同时,有效抬升了系统的频率最低点;文献[13]中进一步结合系统频率响应模型,分析评估综合惯量控制下风机能够为系统提供的等值惯量大小.然而,惯量控制通常需要通过最大的频率扰动来选定控制参数,在一般扰动下不能充分利用调频资源.为此,文献[14]中最早提出一种固定附加功率和支撑时间的频率支撑控制,这种方法在功率扰动发生后立刻抬升风机有功出力,并维持一段时间以为系统提供频率支撑.这一方法会造成频率的二次跌落(secondary frequency drop,SFD),不恰当的参数设置可能会导致严重的二次跌落,总体的频率最低点甚至较风机不参与调频时更低.针对这一问题,文献[15]、文献[16-18]中分别通过为各风机设置不同的支撑时间、耦合附加功率参考值与风机转速来平滑风机出力变化,有效抑制了SFD.这类方法需要参数设置适当才能更好地发挥作用,但实际应用时控制参数的选择较为复杂[19]. ...
海上风电经VSC-HVDC并网改进频率控制策略
1
2021
... 为改善系统的频率动态特性,国内外电网运行规程要求风力发电具备一定的频率支撑能力.现有方法按照调频的能量来源大体上可分为储能和转子动能两种.文献[8]中提出一种分级协调利用风轮机转子动能和机头换流器直流电容储能的惯量控制策略.类似地,文献[9]中同时利用转子动能和电容储能为岸上系统提供惯量支撑,并通过在岸上换流器上附加功率-电压辅助控制对虚拟惯量控制造成的输出功率降低进行补偿.此外,也有文献研究了风机与电池储能系统协同参与的频率控制策略[10-11].虚拟惯量控制能够有效改善系统的最大频率变化率,对系统频率最低点改善效果有限.为此,文献[12]中结合下垂和虚拟惯量控制,在抑制频率变化率的同时,有效抬升了系统的频率最低点;文献[13]中进一步结合系统频率响应模型,分析评估综合惯量控制下风机能够为系统提供的等值惯量大小.然而,惯量控制通常需要通过最大的频率扰动来选定控制参数,在一般扰动下不能充分利用调频资源.为此,文献[14]中最早提出一种固定附加功率和支撑时间的频率支撑控制,这种方法在功率扰动发生后立刻抬升风机有功出力,并维持一段时间以为系统提供频率支撑.这一方法会造成频率的二次跌落(secondary frequency drop,SFD),不恰当的参数设置可能会导致严重的二次跌落,总体的频率最低点甚至较风机不参与调频时更低.针对这一问题,文献[15]、文献[16-18]中分别通过为各风机设置不同的支撑时间、耦合附加功率参考值与风机转速来平滑风机出力变化,有效抑制了SFD.这类方法需要参数设置适当才能更好地发挥作用,但实际应用时控制参数的选择较为复杂[19]. ...
An improved frequency control strategy for offshore wind farm connected by VSC-HVDC
1
2021
... 为改善系统的频率动态特性,国内外电网运行规程要求风力发电具备一定的频率支撑能力.现有方法按照调频的能量来源大体上可分为储能和转子动能两种.文献[8]中提出一种分级协调利用风轮机转子动能和机头换流器直流电容储能的惯量控制策略.类似地,文献[9]中同时利用转子动能和电容储能为岸上系统提供惯量支撑,并通过在岸上换流器上附加功率-电压辅助控制对虚拟惯量控制造成的输出功率降低进行补偿.此外,也有文献研究了风机与电池储能系统协同参与的频率控制策略[10-11].虚拟惯量控制能够有效改善系统的最大频率变化率,对系统频率最低点改善效果有限.为此,文献[12]中结合下垂和虚拟惯量控制,在抑制频率变化率的同时,有效抬升了系统的频率最低点;文献[13]中进一步结合系统频率响应模型,分析评估综合惯量控制下风机能够为系统提供的等值惯量大小.然而,惯量控制通常需要通过最大的频率扰动来选定控制参数,在一般扰动下不能充分利用调频资源.为此,文献[14]中最早提出一种固定附加功率和支撑时间的频率支撑控制,这种方法在功率扰动发生后立刻抬升风机有功出力,并维持一段时间以为系统提供频率支撑.这一方法会造成频率的二次跌落(secondary frequency drop,SFD),不恰当的参数设置可能会导致严重的二次跌落,总体的频率最低点甚至较风机不参与调频时更低.针对这一问题,文献[15]、文献[16-18]中分别通过为各风机设置不同的支撑时间、耦合附加功率参考值与风机转速来平滑风机出力变化,有效抑制了SFD.这类方法需要参数设置适当才能更好地发挥作用,但实际应用时控制参数的选择较为复杂[19]. ...
A hierarchical inertial control scheme for multiple wind farms with BESSs based on ADMM
2
2021
... 为改善系统的频率动态特性,国内外电网运行规程要求风力发电具备一定的频率支撑能力.现有方法按照调频的能量来源大体上可分为储能和转子动能两种.文献[8]中提出一种分级协调利用风轮机转子动能和机头换流器直流电容储能的惯量控制策略.类似地,文献[9]中同时利用转子动能和电容储能为岸上系统提供惯量支撑,并通过在岸上换流器上附加功率-电压辅助控制对虚拟惯量控制造成的输出功率降低进行补偿.此外,也有文献研究了风机与电池储能系统协同参与的频率控制策略[10-11].虚拟惯量控制能够有效改善系统的最大频率变化率,对系统频率最低点改善效果有限.为此,文献[12]中结合下垂和虚拟惯量控制,在抑制频率变化率的同时,有效抬升了系统的频率最低点;文献[13]中进一步结合系统频率响应模型,分析评估综合惯量控制下风机能够为系统提供的等值惯量大小.然而,惯量控制通常需要通过最大的频率扰动来选定控制参数,在一般扰动下不能充分利用调频资源.为此,文献[14]中最早提出一种固定附加功率和支撑时间的频率支撑控制,这种方法在功率扰动发生后立刻抬升风机有功出力,并维持一段时间以为系统提供频率支撑.这一方法会造成频率的二次跌落(secondary frequency drop,SFD),不恰当的参数设置可能会导致严重的二次跌落,总体的频率最低点甚至较风机不参与调频时更低.针对这一问题,文献[15]、文献[16-18]中分别通过为各风机设置不同的支撑时间、耦合附加功率参考值与风机转速来平滑风机出力变化,有效抑制了SFD.这类方法需要参数设置适当才能更好地发挥作用,但实际应用时控制参数的选择较为复杂[19]. ...
... 为改善系统的频率动态特性,国内外电网运行规程要求风力发电具备一定的频率支撑能力.现有方法按照调频的能量来源大体上可分为储能和转子动能两种.文献[8]中提出一种分级协调利用风轮机转子动能和机头换流器直流电容储能的惯量控制策略.类似地,文献[9]中同时利用转子动能和电容储能为岸上系统提供惯量支撑,并通过在岸上换流器上附加功率-电压辅助控制对虚拟惯量控制造成的输出功率降低进行补偿.此外,也有文献研究了风机与电池储能系统协同参与的频率控制策略[10-11].虚拟惯量控制能够有效改善系统的最大频率变化率,对系统频率最低点改善效果有限.为此,文献[12]中结合下垂和虚拟惯量控制,在抑制频率变化率的同时,有效抬升了系统的频率最低点;文献[13]中进一步结合系统频率响应模型,分析评估综合惯量控制下风机能够为系统提供的等值惯量大小.然而,惯量控制通常需要通过最大的频率扰动来选定控制参数,在一般扰动下不能充分利用调频资源.为此,文献[14]中最早提出一种固定附加功率和支撑时间的频率支撑控制,这种方法在功率扰动发生后立刻抬升风机有功出力,并维持一段时间以为系统提供频率支撑.这一方法会造成频率的二次跌落(secondary frequency drop,SFD),不恰当的参数设置可能会导致严重的二次跌落,总体的频率最低点甚至较风机不参与调频时更低.针对这一问题,文献[15]、文献[16-18]中分别通过为各风机设置不同的支撑时间、耦合附加功率参考值与风机转速来平滑风机出力变化,有效抑制了SFD.这类方法需要参数设置适当才能更好地发挥作用,但实际应用时控制参数的选择较为复杂[19]. ...
Inertial control strategy for wind farm with distributed energy storage system based on model predictive control
1
2022
... 为改善系统的频率动态特性,国内外电网运行规程要求风力发电具备一定的频率支撑能力.现有方法按照调频的能量来源大体上可分为储能和转子动能两种.文献[8]中提出一种分级协调利用风轮机转子动能和机头换流器直流电容储能的惯量控制策略.类似地,文献[9]中同时利用转子动能和电容储能为岸上系统提供惯量支撑,并通过在岸上换流器上附加功率-电压辅助控制对虚拟惯量控制造成的输出功率降低进行补偿.此外,也有文献研究了风机与电池储能系统协同参与的频率控制策略[10-11].虚拟惯量控制能够有效改善系统的最大频率变化率,对系统频率最低点改善效果有限.为此,文献[12]中结合下垂和虚拟惯量控制,在抑制频率变化率的同时,有效抬升了系统的频率最低点;文献[13]中进一步结合系统频率响应模型,分析评估综合惯量控制下风机能够为系统提供的等值惯量大小.然而,惯量控制通常需要通过最大的频率扰动来选定控制参数,在一般扰动下不能充分利用调频资源.为此,文献[14]中最早提出一种固定附加功率和支撑时间的频率支撑控制,这种方法在功率扰动发生后立刻抬升风机有功出力,并维持一段时间以为系统提供频率支撑.这一方法会造成频率的二次跌落(secondary frequency drop,SFD),不恰当的参数设置可能会导致严重的二次跌落,总体的频率最低点甚至较风机不参与调频时更低.针对这一问题,文献[15]、文献[16-18]中分别通过为各风机设置不同的支撑时间、耦合附加功率参考值与风机转速来平滑风机出力变化,有效抑制了SFD.这类方法需要参数设置适当才能更好地发挥作用,但实际应用时控制参数的选择较为复杂[19]. ...
基于虚拟惯量和频率下垂控制的双馈风电机组一次调频策略
1
2017
... 为改善系统的频率动态特性,国内外电网运行规程要求风力发电具备一定的频率支撑能力.现有方法按照调频的能量来源大体上可分为储能和转子动能两种.文献[8]中提出一种分级协调利用风轮机转子动能和机头换流器直流电容储能的惯量控制策略.类似地,文献[9]中同时利用转子动能和电容储能为岸上系统提供惯量支撑,并通过在岸上换流器上附加功率-电压辅助控制对虚拟惯量控制造成的输出功率降低进行补偿.此外,也有文献研究了风机与电池储能系统协同参与的频率控制策略[10-11].虚拟惯量控制能够有效改善系统的最大频率变化率,对系统频率最低点改善效果有限.为此,文献[12]中结合下垂和虚拟惯量控制,在抑制频率变化率的同时,有效抬升了系统的频率最低点;文献[13]中进一步结合系统频率响应模型,分析评估综合惯量控制下风机能够为系统提供的等值惯量大小.然而,惯量控制通常需要通过最大的频率扰动来选定控制参数,在一般扰动下不能充分利用调频资源.为此,文献[14]中最早提出一种固定附加功率和支撑时间的频率支撑控制,这种方法在功率扰动发生后立刻抬升风机有功出力,并维持一段时间以为系统提供频率支撑.这一方法会造成频率的二次跌落(secondary frequency drop,SFD),不恰当的参数设置可能会导致严重的二次跌落,总体的频率最低点甚至较风机不参与调频时更低.针对这一问题,文献[15]、文献[16-18]中分别通过为各风机设置不同的支撑时间、耦合附加功率参考值与风机转速来平滑风机出力变化,有效抑制了SFD.这类方法需要参数设置适当才能更好地发挥作用,但实际应用时控制参数的选择较为复杂[19]. ...
Primary frequency regulation strategy of DFIG based on virtual inertia and frequency droop control
1
2017
... 为改善系统的频率动态特性,国内外电网运行规程要求风力发电具备一定的频率支撑能力.现有方法按照调频的能量来源大体上可分为储能和转子动能两种.文献[8]中提出一种分级协调利用风轮机转子动能和机头换流器直流电容储能的惯量控制策略.类似地,文献[9]中同时利用转子动能和电容储能为岸上系统提供惯量支撑,并通过在岸上换流器上附加功率-电压辅助控制对虚拟惯量控制造成的输出功率降低进行补偿.此外,也有文献研究了风机与电池储能系统协同参与的频率控制策略[10-11].虚拟惯量控制能够有效改善系统的最大频率变化率,对系统频率最低点改善效果有限.为此,文献[12]中结合下垂和虚拟惯量控制,在抑制频率变化率的同时,有效抬升了系统的频率最低点;文献[13]中进一步结合系统频率响应模型,分析评估综合惯量控制下风机能够为系统提供的等值惯量大小.然而,惯量控制通常需要通过最大的频率扰动来选定控制参数,在一般扰动下不能充分利用调频资源.为此,文献[14]中最早提出一种固定附加功率和支撑时间的频率支撑控制,这种方法在功率扰动发生后立刻抬升风机有功出力,并维持一段时间以为系统提供频率支撑.这一方法会造成频率的二次跌落(secondary frequency drop,SFD),不恰当的参数设置可能会导致严重的二次跌落,总体的频率最低点甚至较风机不参与调频时更低.针对这一问题,文献[15]、文献[16-18]中分别通过为各风机设置不同的支撑时间、耦合附加功率参考值与风机转速来平滑风机出力变化,有效抑制了SFD.这类方法需要参数设置适当才能更好地发挥作用,但实际应用时控制参数的选择较为复杂[19]. ...
综合惯性控制下风力机惯性支撑能力分析及等效惯量评估
2
2024
... 为改善系统的频率动态特性,国内外电网运行规程要求风力发电具备一定的频率支撑能力.现有方法按照调频的能量来源大体上可分为储能和转子动能两种.文献[8]中提出一种分级协调利用风轮机转子动能和机头换流器直流电容储能的惯量控制策略.类似地,文献[9]中同时利用转子动能和电容储能为岸上系统提供惯量支撑,并通过在岸上换流器上附加功率-电压辅助控制对虚拟惯量控制造成的输出功率降低进行补偿.此外,也有文献研究了风机与电池储能系统协同参与的频率控制策略[10-11].虚拟惯量控制能够有效改善系统的最大频率变化率,对系统频率最低点改善效果有限.为此,文献[12]中结合下垂和虚拟惯量控制,在抑制频率变化率的同时,有效抬升了系统的频率最低点;文献[13]中进一步结合系统频率响应模型,分析评估综合惯量控制下风机能够为系统提供的等值惯量大小.然而,惯量控制通常需要通过最大的频率扰动来选定控制参数,在一般扰动下不能充分利用调频资源.为此,文献[14]中最早提出一种固定附加功率和支撑时间的频率支撑控制,这种方法在功率扰动发生后立刻抬升风机有功出力,并维持一段时间以为系统提供频率支撑.这一方法会造成频率的二次跌落(secondary frequency drop,SFD),不恰当的参数设置可能会导致严重的二次跌落,总体的频率最低点甚至较风机不参与调频时更低.针对这一问题,文献[15]、文献[16-18]中分别通过为各风机设置不同的支撑时间、耦合附加功率参考值与风机转速来平滑风机出力变化,有效抑制了SFD.这类方法需要参数设置适当才能更好地发挥作用,但实际应用时控制参数的选择较为复杂[19]. ...
... 系统频率响应(system frequency response, SFR)模型,最早由Anderson等[27]提出.该模型将多机系统频率响应聚合等效为阶数较低的单台调速器响应,从而简化系统频率分析和频率控制器设计,在电力系统频率分析中应用广泛[13,19,28-29].简化SFR模型进一步忽略两个很小的时间常数[27],在机电暂态尺度仍具有较高的计算精度,该模型的传递函数可表示为 ...
Inertial support capacity analysis and equivalent inertia estimation of wind turbines in integrated inertial control
2
2024
... 为改善系统的频率动态特性,国内外电网运行规程要求风力发电具备一定的频率支撑能力.现有方法按照调频的能量来源大体上可分为储能和转子动能两种.文献[8]中提出一种分级协调利用风轮机转子动能和机头换流器直流电容储能的惯量控制策略.类似地,文献[9]中同时利用转子动能和电容储能为岸上系统提供惯量支撑,并通过在岸上换流器上附加功率-电压辅助控制对虚拟惯量控制造成的输出功率降低进行补偿.此外,也有文献研究了风机与电池储能系统协同参与的频率控制策略[10-11].虚拟惯量控制能够有效改善系统的最大频率变化率,对系统频率最低点改善效果有限.为此,文献[12]中结合下垂和虚拟惯量控制,在抑制频率变化率的同时,有效抬升了系统的频率最低点;文献[13]中进一步结合系统频率响应模型,分析评估综合惯量控制下风机能够为系统提供的等值惯量大小.然而,惯量控制通常需要通过最大的频率扰动来选定控制参数,在一般扰动下不能充分利用调频资源.为此,文献[14]中最早提出一种固定附加功率和支撑时间的频率支撑控制,这种方法在功率扰动发生后立刻抬升风机有功出力,并维持一段时间以为系统提供频率支撑.这一方法会造成频率的二次跌落(secondary frequency drop,SFD),不恰当的参数设置可能会导致严重的二次跌落,总体的频率最低点甚至较风机不参与调频时更低.针对这一问题,文献[15]、文献[16-18]中分别通过为各风机设置不同的支撑时间、耦合附加功率参考值与风机转速来平滑风机出力变化,有效抑制了SFD.这类方法需要参数设置适当才能更好地发挥作用,但实际应用时控制参数的选择较为复杂[19]. ...
... 系统频率响应(system frequency response, SFR)模型,最早由Anderson等[27]提出.该模型将多机系统频率响应聚合等效为阶数较低的单台调速器响应,从而简化系统频率分析和频率控制器设计,在电力系统频率分析中应用广泛[13,19,28-29].简化SFR模型进一步忽略两个很小的时间常数[27],在机电暂态尺度仍具有较高的计算精度,该模型的传递函数可表示为 ...
Temporary primary frequency control support by variable speed wind turbines—Potential and applications
1
2008
... 为改善系统的频率动态特性,国内外电网运行规程要求风力发电具备一定的频率支撑能力.现有方法按照调频的能量来源大体上可分为储能和转子动能两种.文献[8]中提出一种分级协调利用风轮机转子动能和机头换流器直流电容储能的惯量控制策略.类似地,文献[9]中同时利用转子动能和电容储能为岸上系统提供惯量支撑,并通过在岸上换流器上附加功率-电压辅助控制对虚拟惯量控制造成的输出功率降低进行补偿.此外,也有文献研究了风机与电池储能系统协同参与的频率控制策略[10-11].虚拟惯量控制能够有效改善系统的最大频率变化率,对系统频率最低点改善效果有限.为此,文献[12]中结合下垂和虚拟惯量控制,在抑制频率变化率的同时,有效抬升了系统的频率最低点;文献[13]中进一步结合系统频率响应模型,分析评估综合惯量控制下风机能够为系统提供的等值惯量大小.然而,惯量控制通常需要通过最大的频率扰动来选定控制参数,在一般扰动下不能充分利用调频资源.为此,文献[14]中最早提出一种固定附加功率和支撑时间的频率支撑控制,这种方法在功率扰动发生后立刻抬升风机有功出力,并维持一段时间以为系统提供频率支撑.这一方法会造成频率的二次跌落(secondary frequency drop,SFD),不恰当的参数设置可能会导致严重的二次跌落,总体的频率最低点甚至较风机不参与调频时更低.针对这一问题,文献[15]、文献[16-18]中分别通过为各风机设置不同的支撑时间、耦合附加功率参考值与风机转速来平滑风机出力变化,有效抑制了SFD.这类方法需要参数设置适当才能更好地发挥作用,但实际应用时控制参数的选择较为复杂[19]. ...
Frequency support from wind turbine generators with a time-variable droop characteristic
1
2018
... 为改善系统的频率动态特性,国内外电网运行规程要求风力发电具备一定的频率支撑能力.现有方法按照调频的能量来源大体上可分为储能和转子动能两种.文献[8]中提出一种分级协调利用风轮机转子动能和机头换流器直流电容储能的惯量控制策略.类似地,文献[9]中同时利用转子动能和电容储能为岸上系统提供惯量支撑,并通过在岸上换流器上附加功率-电压辅助控制对虚拟惯量控制造成的输出功率降低进行补偿.此外,也有文献研究了风机与电池储能系统协同参与的频率控制策略[10-11].虚拟惯量控制能够有效改善系统的最大频率变化率,对系统频率最低点改善效果有限.为此,文献[12]中结合下垂和虚拟惯量控制,在抑制频率变化率的同时,有效抬升了系统的频率最低点;文献[13]中进一步结合系统频率响应模型,分析评估综合惯量控制下风机能够为系统提供的等值惯量大小.然而,惯量控制通常需要通过最大的频率扰动来选定控制参数,在一般扰动下不能充分利用调频资源.为此,文献[14]中最早提出一种固定附加功率和支撑时间的频率支撑控制,这种方法在功率扰动发生后立刻抬升风机有功出力,并维持一段时间以为系统提供频率支撑.这一方法会造成频率的二次跌落(secondary frequency drop,SFD),不恰当的参数设置可能会导致严重的二次跌落,总体的频率最低点甚至较风机不参与调频时更低.针对这一问题,文献[15]、文献[16-18]中分别通过为各风机设置不同的支撑时间、耦合附加功率参考值与风机转速来平滑风机出力变化,有效抑制了SFD.这类方法需要参数设置适当才能更好地发挥作用,但实际应用时控制参数的选择较为复杂[19]. ...
Frequency control support of a doubly-fed induction generator based on the torque limit
1
2016
... 为改善系统的频率动态特性,国内外电网运行规程要求风力发电具备一定的频率支撑能力.现有方法按照调频的能量来源大体上可分为储能和转子动能两种.文献[8]中提出一种分级协调利用风轮机转子动能和机头换流器直流电容储能的惯量控制策略.类似地,文献[9]中同时利用转子动能和电容储能为岸上系统提供惯量支撑,并通过在岸上换流器上附加功率-电压辅助控制对虚拟惯量控制造成的输出功率降低进行补偿.此外,也有文献研究了风机与电池储能系统协同参与的频率控制策略[10-11].虚拟惯量控制能够有效改善系统的最大频率变化率,对系统频率最低点改善效果有限.为此,文献[12]中结合下垂和虚拟惯量控制,在抑制频率变化率的同时,有效抬升了系统的频率最低点;文献[13]中进一步结合系统频率响应模型,分析评估综合惯量控制下风机能够为系统提供的等值惯量大小.然而,惯量控制通常需要通过最大的频率扰动来选定控制参数,在一般扰动下不能充分利用调频资源.为此,文献[14]中最早提出一种固定附加功率和支撑时间的频率支撑控制,这种方法在功率扰动发生后立刻抬升风机有功出力,并维持一段时间以为系统提供频率支撑.这一方法会造成频率的二次跌落(secondary frequency drop,SFD),不恰当的参数设置可能会导致严重的二次跌落,总体的频率最低点甚至较风机不参与调频时更低.针对这一问题,文献[15]、文献[16-18]中分别通过为各风机设置不同的支撑时间、耦合附加功率参考值与风机转速来平滑风机出力变化,有效抑制了SFD.这类方法需要参数设置适当才能更好地发挥作用,但实际应用时控制参数的选择较为复杂[19]. ...
Temporary frequency support of a DFIG for high wind power penetration
0
2018
Gaussian distribution-based inertial control of wind turbine generators for fast frequency response in low inertia systems
1
2022
... 为改善系统的频率动态特性,国内外电网运行规程要求风力发电具备一定的频率支撑能力.现有方法按照调频的能量来源大体上可分为储能和转子动能两种.文献[8]中提出一种分级协调利用风轮机转子动能和机头换流器直流电容储能的惯量控制策略.类似地,文献[9]中同时利用转子动能和电容储能为岸上系统提供惯量支撑,并通过在岸上换流器上附加功率-电压辅助控制对虚拟惯量控制造成的输出功率降低进行补偿.此外,也有文献研究了风机与电池储能系统协同参与的频率控制策略[10-11].虚拟惯量控制能够有效改善系统的最大频率变化率,对系统频率最低点改善效果有限.为此,文献[12]中结合下垂和虚拟惯量控制,在抑制频率变化率的同时,有效抬升了系统的频率最低点;文献[13]中进一步结合系统频率响应模型,分析评估综合惯量控制下风机能够为系统提供的等值惯量大小.然而,惯量控制通常需要通过最大的频率扰动来选定控制参数,在一般扰动下不能充分利用调频资源.为此,文献[14]中最早提出一种固定附加功率和支撑时间的频率支撑控制,这种方法在功率扰动发生后立刻抬升风机有功出力,并维持一段时间以为系统提供频率支撑.这一方法会造成频率的二次跌落(secondary frequency drop,SFD),不恰当的参数设置可能会导致严重的二次跌落,总体的频率最低点甚至较风机不参与调频时更低.针对这一问题,文献[15]、文献[16-18]中分别通过为各风机设置不同的支撑时间、耦合附加功率参考值与风机转速来平滑风机出力变化,有效抑制了SFD.这类方法需要参数设置适当才能更好地发挥作用,但实际应用时控制参数的选择较为复杂[19]. ...
新能源电力系统暂态频率稳定分析与调频控制方法综述
2
2023
... 为改善系统的频率动态特性,国内外电网运行规程要求风力发电具备一定的频率支撑能力.现有方法按照调频的能量来源大体上可分为储能和转子动能两种.文献[8]中提出一种分级协调利用风轮机转子动能和机头换流器直流电容储能的惯量控制策略.类似地,文献[9]中同时利用转子动能和电容储能为岸上系统提供惯量支撑,并通过在岸上换流器上附加功率-电压辅助控制对虚拟惯量控制造成的输出功率降低进行补偿.此外,也有文献研究了风机与电池储能系统协同参与的频率控制策略[10-11].虚拟惯量控制能够有效改善系统的最大频率变化率,对系统频率最低点改善效果有限.为此,文献[12]中结合下垂和虚拟惯量控制,在抑制频率变化率的同时,有效抬升了系统的频率最低点;文献[13]中进一步结合系统频率响应模型,分析评估综合惯量控制下风机能够为系统提供的等值惯量大小.然而,惯量控制通常需要通过最大的频率扰动来选定控制参数,在一般扰动下不能充分利用调频资源.为此,文献[14]中最早提出一种固定附加功率和支撑时间的频率支撑控制,这种方法在功率扰动发生后立刻抬升风机有功出力,并维持一段时间以为系统提供频率支撑.这一方法会造成频率的二次跌落(secondary frequency drop,SFD),不恰当的参数设置可能会导致严重的二次跌落,总体的频率最低点甚至较风机不参与调频时更低.针对这一问题,文献[15]、文献[16-18]中分别通过为各风机设置不同的支撑时间、耦合附加功率参考值与风机转速来平滑风机出力变化,有效抑制了SFD.这类方法需要参数设置适当才能更好地发挥作用,但实际应用时控制参数的选择较为复杂[19]. ...
... 系统频率响应(system frequency response, SFR)模型,最早由Anderson等[27]提出.该模型将多机系统频率响应聚合等效为阶数较低的单台调速器响应,从而简化系统频率分析和频率控制器设计,在电力系统频率分析中应用广泛[13,19,28-29].简化SFR模型进一步忽略两个很小的时间常数[27],在机电暂态尺度仍具有较高的计算精度,该模型的传递函数可表示为 ...
Review of transient frequency stability analysis and frequency regulation control methods for renewable power systems
2
2023
... 为改善系统的频率动态特性,国内外电网运行规程要求风力发电具备一定的频率支撑能力.现有方法按照调频的能量来源大体上可分为储能和转子动能两种.文献[8]中提出一种分级协调利用风轮机转子动能和机头换流器直流电容储能的惯量控制策略.类似地,文献[9]中同时利用转子动能和电容储能为岸上系统提供惯量支撑,并通过在岸上换流器上附加功率-电压辅助控制对虚拟惯量控制造成的输出功率降低进行补偿.此外,也有文献研究了风机与电池储能系统协同参与的频率控制策略[10-11].虚拟惯量控制能够有效改善系统的最大频率变化率,对系统频率最低点改善效果有限.为此,文献[12]中结合下垂和虚拟惯量控制,在抑制频率变化率的同时,有效抬升了系统的频率最低点;文献[13]中进一步结合系统频率响应模型,分析评估综合惯量控制下风机能够为系统提供的等值惯量大小.然而,惯量控制通常需要通过最大的频率扰动来选定控制参数,在一般扰动下不能充分利用调频资源.为此,文献[14]中最早提出一种固定附加功率和支撑时间的频率支撑控制,这种方法在功率扰动发生后立刻抬升风机有功出力,并维持一段时间以为系统提供频率支撑.这一方法会造成频率的二次跌落(secondary frequency drop,SFD),不恰当的参数设置可能会导致严重的二次跌落,总体的频率最低点甚至较风机不参与调频时更低.针对这一问题,文献[15]、文献[16-18]中分别通过为各风机设置不同的支撑时间、耦合附加功率参考值与风机转速来平滑风机出力变化,有效抑制了SFD.这类方法需要参数设置适当才能更好地发挥作用,但实际应用时控制参数的选择较为复杂[19]. ...
... 系统频率响应(system frequency response, SFR)模型,最早由Anderson等[27]提出.该模型将多机系统频率响应聚合等效为阶数较低的单台调速器响应,从而简化系统频率分析和频率控制器设计,在电力系统频率分析中应用广泛[13,19,28-29].简化SFR模型进一步忽略两个很小的时间常数[27],在机电暂态尺度仍具有较高的计算精度,该模型的传递函数可表示为 ...
Rotor speed-free estimation of the frequency of the center of inertia




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}