In hazy weather, due to the low visibility of traffic roads, the video images collected are degraded and the image information is fuzzy. Considering the problem of low real-time processing of the traditional system, an image defogging system based on the ZYNQ platform is designed and applied to the intelligent driving recorder system. First, aiming at the problems of the traditional dark channel defogging algorithm in the sky region, a sky region segmentation strategy is proposed to correct the image restoration parameters. Then, in order to solve the problem that the pixel ordering of the whole image consumes a lot of resources when calculating the global atmospheric light value, a frame iteration method is proposed to optimize the atmospheric light value by making the advantage of the parallel operation on the FPGA platform, and at the same time, the optimization of guided filtering is realized. Finally, using dual-channel high definition multimedia interface (HDMI) resources, a real-time traffic image video processing experimental platform is established by using one channel of the dual HDMI resources as video input and the other as video processing output, and experimental simulation of the algorithm in this paper is conducted. The experimental results show that the system has a good defogging performance for the traffic video in hazy weather, especially in solving the problem of defogging distortion in the sky area. When the traffic video with a resolution of 1 280×720 is defogged, the processing speed can reach 30 frame/s meeting the real-time requirements.
HUANG He, HU Kaiyi, YANG Lan, WANG Hao, GAO Tao, WANG Huifeng. FPGA Design of Image Defogging System in Intelligent Tachograph[J]. Journal of Shanghai Jiaotong University, 2024, 58(4): 565-578 doi:10.16183/j.cnki.jsjtu.2023.026
随着城市交通系统的快速发展,交通事故的发生率也呈现攀升趋势.智能行车记录仪可以作为记录驾驶行为的工具,在事故发生后辅助交管部门做出正确决策,提高事故处理效率.雾霾、沙尘等恶劣天气情况使得道路可视性降低,成为交通事故频繁发生的重要原因[1],同时会降低行车记录仪的识别能力.因此,研究交通图像去雾系统对智能驾驶和交通检测非常重要.现阶段单幅图像去雾算法研究大多基于中央处理器(Central Processing Unit, CPU)或图形处理器(Graphics Processing Unit, GPU)的个人计算机(Personal Computer, PC),具有硬件实现成本较高、体积较大、便携性差且功耗较大等不足,不适用于实时图像处理场景[2].而现场可编程门阵列(Field Programmable Gate Array, FPGA)可以重构内部逻辑,在不同的逻辑功能间并发,设计任务流水线,具有实时性高、功耗低、便携性强等优点,适用于嵌入式图像去雾平台.基于非物理模型的图像去雾算法能明显增强图像对比度,但对雾天图像退化的根本原因缺少研究,在一定程度上导致去雾后图像失真[3];基于机器学习的图像去雾算法通过估计复原参数实现去雾[4],但硬件实现复杂度高,不利于交通流这类实时视频处理.而传统暗通道去雾算法采用全局大气光值处理整幅图像,易在天空区域产生失真和伪轮廓[5].针对以上问题,结合智能行车记录仪的图像处理存在即时性和突发性的特点,本文基于ZYNQ-7000全可编程片上系统(Zynq-7000 All Programmable SoC, ZYNQ)平台设计了一种含天空区域行车记录仪视频流去雾系统,较好抑制了天空区域失真,复原后图像更加清晰,且充分发挥了FPGA并行运算的优势,较好满足实时处理要求.
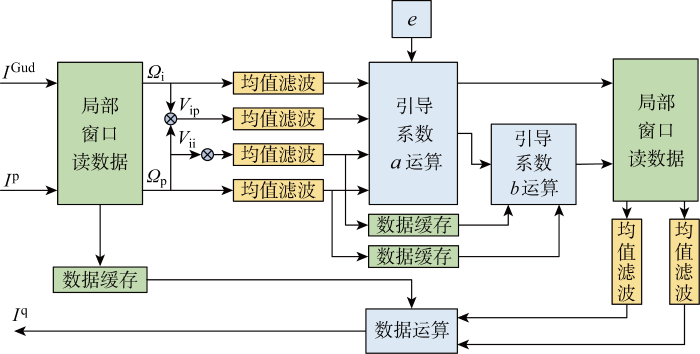
Fig.7
Typical window row caching and filtering computing circuit
以3×3模板为例进行窗口滤波操作,在FPGA行扫描图像时,每经过一个像素时钟完成处理一个像素.每个局部窗口中含有9 个像素,必须读取9 个像素时钟,得到单行像素.因此,可以通过行缓存对图像开窗,如图7所示.当第1行数据起始时,写入Linebuff1至第1行结束;当第2行数据起始时,Linebuff0开始写入第1行数据,Linebuff1写入第2行数据;当第3行数据起始时,读取当前行,通过打拍截取数据形成局部窗口,对窗口缓存行更新.该方法可以同时构成三行数据完成对图像3×3局部窗口的滤波,存入缓存的数据深度由视频行像素大小决定,在滤波电路中通过乘加树来完成处理窗口像素.行缓存通过双端口随机存储器(Random Access Memory, RAM)和先进先出(First in, First out, FIFO)来实现.
Single image haze removal is a challenging ill-posed problem. Existing methods use various constraints/priors to get plausible dehazing solutions. The key to achieve haze removal is to estimate a medium transmission map for an input hazy image. In this paper, we propose a trainable end-to-end system called DehazeNet, for medium transmission estimation. DehazeNet takes a hazy image as input, and outputs its medium transmission map that is subsequently used to recover a haze-free image via atmospheric scattering model. DehazeNet adopts convolutional neural network-based deep architecture, whose layers are specially designed to embody the established assumptions/priors in image dehazing. Specifically, the layers of Maxout units are used for feature extraction, which can generate almost all haze-relevant features. We also propose a novel nonlinear activation function in DehazeNet, called bilateral rectified linear unit, which is able to improve the quality of recovered haze-free image. We establish connections between the components of the proposed DehazeNet and those used in existing methods. Experiments on benchmark images show that DehazeNet achieves superior performance over existing methods, yet keeps efficient and easy to use.
In this paper, we propose a simple but effective image prior-dark channel prior to remove haze from a single input image. The dark channel prior is a kind of statistics of outdoor haze-free images. It is based on a key observation-most local patches in outdoor haze-free images contain some pixels whose intensity is very low in at least one color channel. Using this prior with the haze imaging model, we can directly estimate the thickness of the haze and recover a high-quality haze-free image. Results on a variety of hazy images demonstrate the power of the proposed prior. Moreover, a high-quality depth map can also be obtained as a byproduct of haze removal.
At present,convolutional neural network is more and more used in industrial production.The traditional neural network platform based on CPU and GPU has the disadvantages of large volume and high energy consumption,which makes it difficult to deploy in the industrial production site.Although the embedded platform based on ARM is easy to deploy,it has the disadvantage of low computational power,so it is difficult to implement convolutional neural network efficiently.To solve this problem,this paper designs and implements a convolution neural network unit based on Zynq platform.By making full use of the parallel computing features of the field bus on Zynq platform,the convolution layer in the convolution neural network is accelerated,and the IP core of the convolution layer and pooling layer is designed with high-level synthesis,and the optimization scheme is given.Finally,it achieves the efficient recognition of handwritten numbers on the embedded platform.Experiments show that this design unit can quickly and accurately recognize handwritten digits while consuming less computing resources on the FPGA.
KIMJ H, KIMC S.
Approximate solution to optimized contrast enhancement for hazy image
[C]// IEEE International Symposium on Consumer Electronics. Seoul, Korea: IEEE, 2014: 1-2.
We propose a referenceless perceptual fog density prediction model based on natural scene statistics (NSS) and fog aware statistical features. The proposed model, called Fog Aware Density Evaluator (FADE), predicts the visibility of a foggy scene from a single image without reference to a corresponding fog-free image, without dependence on salient objects in a scene, without side geographical camera information, without estimating a depth-dependent transmission map, and without training on human-rated judgments. FADE only makes use of measurable deviations from statistical regularities observed in natural foggy and fog-free images. Fog aware statistical features that define the perceptual fog density index derive from a space domain NSS model and the observed characteristics of foggy images. FADE not only predicts perceptual fog density for the entire image, but also provides a local fog density index for each patch. The predicted fog density using FADE correlates well with human judgments of fog density taken in a subjective study on a large foggy image database. As applications, FADE not only accurately assesses the performance of defogging algorithms designed to enhance the visibility of foggy images, but also is well suited for image defogging. A new FADE-based referenceless perceptual image defogging, dubbed DEnsity of Fog Assessment-based DEfogger (DEFADE) achieves better results for darker, denser foggy images as well as on standard foggy images than the state of the art defogging methods. A software release of FADE and DEFADE is available online for public use: http://live.ece.utexas.edu/research/fog/index.html.
一次导致重大交通事故的大雾天气成因分析
1
2021
... 随着城市交通系统的快速发展,交通事故的发生率也呈现攀升趋势.智能行车记录仪可以作为记录驾驶行为的工具,在事故发生后辅助交管部门做出正确决策,提高事故处理效率.雾霾、沙尘等恶劣天气情况使得道路可视性降低,成为交通事故频繁发生的重要原因[1],同时会降低行车记录仪的识别能力.因此,研究交通图像去雾系统对智能驾驶和交通检测非常重要.现阶段单幅图像去雾算法研究大多基于中央处理器(Central Processing Unit, CPU)或图形处理器(Graphics Processing Unit, GPU)的个人计算机(Personal Computer, PC),具有硬件实现成本较高、体积较大、便携性差且功耗较大等不足,不适用于实时图像处理场景[2].而现场可编程门阵列(Field Programmable Gate Array, FPGA)可以重构内部逻辑,在不同的逻辑功能间并发,设计任务流水线,具有实时性高、功耗低、便携性强等优点,适用于嵌入式图像去雾平台.基于非物理模型的图像去雾算法能明显增强图像对比度,但对雾天图像退化的根本原因缺少研究,在一定程度上导致去雾后图像失真[3];基于机器学习的图像去雾算法通过估计复原参数实现去雾[4],但硬件实现复杂度高,不利于交通流这类实时视频处理.而传统暗通道去雾算法采用全局大气光值处理整幅图像,易在天空区域产生失真和伪轮廓[5].针对以上问题,结合智能行车记录仪的图像处理存在即时性和突发性的特点,本文基于ZYNQ-7000全可编程片上系统(Zynq-7000 All Programmable SoC, ZYNQ)平台设计了一种含天空区域行车记录仪视频流去雾系统,较好抑制了天空区域失真,复原后图像更加清晰,且充分发挥了FPGA并行运算的优势,较好满足实时处理要求. ...
Analysis of a dense fog event caused a fatal traffic accident
1
2021
... 随着城市交通系统的快速发展,交通事故的发生率也呈现攀升趋势.智能行车记录仪可以作为记录驾驶行为的工具,在事故发生后辅助交管部门做出正确决策,提高事故处理效率.雾霾、沙尘等恶劣天气情况使得道路可视性降低,成为交通事故频繁发生的重要原因[1],同时会降低行车记录仪的识别能力.因此,研究交通图像去雾系统对智能驾驶和交通检测非常重要.现阶段单幅图像去雾算法研究大多基于中央处理器(Central Processing Unit, CPU)或图形处理器(Graphics Processing Unit, GPU)的个人计算机(Personal Computer, PC),具有硬件实现成本较高、体积较大、便携性差且功耗较大等不足,不适用于实时图像处理场景[2].而现场可编程门阵列(Field Programmable Gate Array, FPGA)可以重构内部逻辑,在不同的逻辑功能间并发,设计任务流水线,具有实时性高、功耗低、便携性强等优点,适用于嵌入式图像去雾平台.基于非物理模型的图像去雾算法能明显增强图像对比度,但对雾天图像退化的根本原因缺少研究,在一定程度上导致去雾后图像失真[3];基于机器学习的图像去雾算法通过估计复原参数实现去雾[4],但硬件实现复杂度高,不利于交通流这类实时视频处理.而传统暗通道去雾算法采用全局大气光值处理整幅图像,易在天空区域产生失真和伪轮廓[5].针对以上问题,结合智能行车记录仪的图像处理存在即时性和突发性的特点,本文基于ZYNQ-7000全可编程片上系统(Zynq-7000 All Programmable SoC, ZYNQ)平台设计了一种含天空区域行车记录仪视频流去雾系统,较好抑制了天空区域失真,复原后图像更加清晰,且充分发挥了FPGA并行运算的优势,较好满足实时处理要求. ...
基于Zynq的嵌入式数字图像处理系统设计
1
2020
... 随着城市交通系统的快速发展,交通事故的发生率也呈现攀升趋势.智能行车记录仪可以作为记录驾驶行为的工具,在事故发生后辅助交管部门做出正确决策,提高事故处理效率.雾霾、沙尘等恶劣天气情况使得道路可视性降低,成为交通事故频繁发生的重要原因[1],同时会降低行车记录仪的识别能力.因此,研究交通图像去雾系统对智能驾驶和交通检测非常重要.现阶段单幅图像去雾算法研究大多基于中央处理器(Central Processing Unit, CPU)或图形处理器(Graphics Processing Unit, GPU)的个人计算机(Personal Computer, PC),具有硬件实现成本较高、体积较大、便携性差且功耗较大等不足,不适用于实时图像处理场景[2].而现场可编程门阵列(Field Programmable Gate Array, FPGA)可以重构内部逻辑,在不同的逻辑功能间并发,设计任务流水线,具有实时性高、功耗低、便携性强等优点,适用于嵌入式图像去雾平台.基于非物理模型的图像去雾算法能明显增强图像对比度,但对雾天图像退化的根本原因缺少研究,在一定程度上导致去雾后图像失真[3];基于机器学习的图像去雾算法通过估计复原参数实现去雾[4],但硬件实现复杂度高,不利于交通流这类实时视频处理.而传统暗通道去雾算法采用全局大气光值处理整幅图像,易在天空区域产生失真和伪轮廓[5].针对以上问题,结合智能行车记录仪的图像处理存在即时性和突发性的特点,本文基于ZYNQ-7000全可编程片上系统(Zynq-7000 All Programmable SoC, ZYNQ)平台设计了一种含天空区域行车记录仪视频流去雾系统,较好抑制了天空区域失真,复原后图像更加清晰,且充分发挥了FPGA并行运算的优势,较好满足实时处理要求. ...
Design of embedded image system based on Z7 series
1
2020
... 随着城市交通系统的快速发展,交通事故的发生率也呈现攀升趋势.智能行车记录仪可以作为记录驾驶行为的工具,在事故发生后辅助交管部门做出正确决策,提高事故处理效率.雾霾、沙尘等恶劣天气情况使得道路可视性降低,成为交通事故频繁发生的重要原因[1],同时会降低行车记录仪的识别能力.因此,研究交通图像去雾系统对智能驾驶和交通检测非常重要.现阶段单幅图像去雾算法研究大多基于中央处理器(Central Processing Unit, CPU)或图形处理器(Graphics Processing Unit, GPU)的个人计算机(Personal Computer, PC),具有硬件实现成本较高、体积较大、便携性差且功耗较大等不足,不适用于实时图像处理场景[2].而现场可编程门阵列(Field Programmable Gate Array, FPGA)可以重构内部逻辑,在不同的逻辑功能间并发,设计任务流水线,具有实时性高、功耗低、便携性强等优点,适用于嵌入式图像去雾平台.基于非物理模型的图像去雾算法能明显增强图像对比度,但对雾天图像退化的根本原因缺少研究,在一定程度上导致去雾后图像失真[3];基于机器学习的图像去雾算法通过估计复原参数实现去雾[4],但硬件实现复杂度高,不利于交通流这类实时视频处理.而传统暗通道去雾算法采用全局大气光值处理整幅图像,易在天空区域产生失真和伪轮廓[5].针对以上问题,结合智能行车记录仪的图像处理存在即时性和突发性的特点,本文基于ZYNQ-7000全可编程片上系统(Zynq-7000 All Programmable SoC, ZYNQ)平台设计了一种含天空区域行车记录仪视频流去雾系统,较好抑制了天空区域失真,复原后图像更加清晰,且充分发挥了FPGA并行运算的优势,较好满足实时处理要求. ...
改进的海雾图像去除方法
2
2021
... 随着城市交通系统的快速发展,交通事故的发生率也呈现攀升趋势.智能行车记录仪可以作为记录驾驶行为的工具,在事故发生后辅助交管部门做出正确决策,提高事故处理效率.雾霾、沙尘等恶劣天气情况使得道路可视性降低,成为交通事故频繁发生的重要原因[1],同时会降低行车记录仪的识别能力.因此,研究交通图像去雾系统对智能驾驶和交通检测非常重要.现阶段单幅图像去雾算法研究大多基于中央处理器(Central Processing Unit, CPU)或图形处理器(Graphics Processing Unit, GPU)的个人计算机(Personal Computer, PC),具有硬件实现成本较高、体积较大、便携性差且功耗较大等不足,不适用于实时图像处理场景[2].而现场可编程门阵列(Field Programmable Gate Array, FPGA)可以重构内部逻辑,在不同的逻辑功能间并发,设计任务流水线,具有实时性高、功耗低、便携性强等优点,适用于嵌入式图像去雾平台.基于非物理模型的图像去雾算法能明显增强图像对比度,但对雾天图像退化的根本原因缺少研究,在一定程度上导致去雾后图像失真[3];基于机器学习的图像去雾算法通过估计复原参数实现去雾[4],但硬件实现复杂度高,不利于交通流这类实时视频处理.而传统暗通道去雾算法采用全局大气光值处理整幅图像,易在天空区域产生失真和伪轮廓[5].针对以上问题,结合智能行车记录仪的图像处理存在即时性和突发性的特点,本文基于ZYNQ-7000全可编程片上系统(Zynq-7000 All Programmable SoC, ZYNQ)平台设计了一种含天空区域行车记录仪视频流去雾系统,较好抑制了天空区域失真,复原后图像更加清晰,且充分发挥了FPGA并行运算的优势,较好满足实时处理要求. ...
... (1) 信息熵[3].表示图像信息量,计算如下: ...
Improved defogging algorithm for sea fog
2
2021
... 随着城市交通系统的快速发展,交通事故的发生率也呈现攀升趋势.智能行车记录仪可以作为记录驾驶行为的工具,在事故发生后辅助交管部门做出正确决策,提高事故处理效率.雾霾、沙尘等恶劣天气情况使得道路可视性降低,成为交通事故频繁发生的重要原因[1],同时会降低行车记录仪的识别能力.因此,研究交通图像去雾系统对智能驾驶和交通检测非常重要.现阶段单幅图像去雾算法研究大多基于中央处理器(Central Processing Unit, CPU)或图形处理器(Graphics Processing Unit, GPU)的个人计算机(Personal Computer, PC),具有硬件实现成本较高、体积较大、便携性差且功耗较大等不足,不适用于实时图像处理场景[2].而现场可编程门阵列(Field Programmable Gate Array, FPGA)可以重构内部逻辑,在不同的逻辑功能间并发,设计任务流水线,具有实时性高、功耗低、便携性强等优点,适用于嵌入式图像去雾平台.基于非物理模型的图像去雾算法能明显增强图像对比度,但对雾天图像退化的根本原因缺少研究,在一定程度上导致去雾后图像失真[3];基于机器学习的图像去雾算法通过估计复原参数实现去雾[4],但硬件实现复杂度高,不利于交通流这类实时视频处理.而传统暗通道去雾算法采用全局大气光值处理整幅图像,易在天空区域产生失真和伪轮廓[5].针对以上问题,结合智能行车记录仪的图像处理存在即时性和突发性的特点,本文基于ZYNQ-7000全可编程片上系统(Zynq-7000 All Programmable SoC, ZYNQ)平台设计了一种含天空区域行车记录仪视频流去雾系统,较好抑制了天空区域失真,复原后图像更加清晰,且充分发挥了FPGA并行运算的优势,较好满足实时处理要求. ...
... (1) 信息熵[3].表示图像信息量,计算如下: ...
DehazeNet: An end-to-end system for single image haze removal
1
2016
... 随着城市交通系统的快速发展,交通事故的发生率也呈现攀升趋势.智能行车记录仪可以作为记录驾驶行为的工具,在事故发生后辅助交管部门做出正确决策,提高事故处理效率.雾霾、沙尘等恶劣天气情况使得道路可视性降低,成为交通事故频繁发生的重要原因[1],同时会降低行车记录仪的识别能力.因此,研究交通图像去雾系统对智能驾驶和交通检测非常重要.现阶段单幅图像去雾算法研究大多基于中央处理器(Central Processing Unit, CPU)或图形处理器(Graphics Processing Unit, GPU)的个人计算机(Personal Computer, PC),具有硬件实现成本较高、体积较大、便携性差且功耗较大等不足,不适用于实时图像处理场景[2].而现场可编程门阵列(Field Programmable Gate Array, FPGA)可以重构内部逻辑,在不同的逻辑功能间并发,设计任务流水线,具有实时性高、功耗低、便携性强等优点,适用于嵌入式图像去雾平台.基于非物理模型的图像去雾算法能明显增强图像对比度,但对雾天图像退化的根本原因缺少研究,在一定程度上导致去雾后图像失真[3];基于机器学习的图像去雾算法通过估计复原参数实现去雾[4],但硬件实现复杂度高,不利于交通流这类实时视频处理.而传统暗通道去雾算法采用全局大气光值处理整幅图像,易在天空区域产生失真和伪轮廓[5].针对以上问题,结合智能行车记录仪的图像处理存在即时性和突发性的特点,本文基于ZYNQ-7000全可编程片上系统(Zynq-7000 All Programmable SoC, ZYNQ)平台设计了一种含天空区域行车记录仪视频流去雾系统,较好抑制了天空区域失真,复原后图像更加清晰,且充分发挥了FPGA并行运算的优势,较好满足实时处理要求. ...
雾霾线求解透射率的二次优化方法
2
2021
... 随着城市交通系统的快速发展,交通事故的发生率也呈现攀升趋势.智能行车记录仪可以作为记录驾驶行为的工具,在事故发生后辅助交管部门做出正确决策,提高事故处理效率.雾霾、沙尘等恶劣天气情况使得道路可视性降低,成为交通事故频繁发生的重要原因[1],同时会降低行车记录仪的识别能力.因此,研究交通图像去雾系统对智能驾驶和交通检测非常重要.现阶段单幅图像去雾算法研究大多基于中央处理器(Central Processing Unit, CPU)或图形处理器(Graphics Processing Unit, GPU)的个人计算机(Personal Computer, PC),具有硬件实现成本较高、体积较大、便携性差且功耗较大等不足,不适用于实时图像处理场景[2].而现场可编程门阵列(Field Programmable Gate Array, FPGA)可以重构内部逻辑,在不同的逻辑功能间并发,设计任务流水线,具有实时性高、功耗低、便携性强等优点,适用于嵌入式图像去雾平台.基于非物理模型的图像去雾算法能明显增强图像对比度,但对雾天图像退化的根本原因缺少研究,在一定程度上导致去雾后图像失真[3];基于机器学习的图像去雾算法通过估计复原参数实现去雾[4],但硬件实现复杂度高,不利于交通流这类实时视频处理.而传统暗通道去雾算法采用全局大气光值处理整幅图像,易在天空区域产生失真和伪轮廓[5].针对以上问题,结合智能行车记录仪的图像处理存在即时性和突发性的特点,本文基于ZYNQ-7000全可编程片上系统(Zynq-7000 All Programmable SoC, ZYNQ)平台设计了一种含天空区域行车记录仪视频流去雾系统,较好抑制了天空区域失真,复原后图像更加清晰,且充分发挥了FPGA并行运算的优势,较好满足实时处理要求. ...















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}