

沉船打捞是一种缺乏标准指导方针的经验性技术,其作业成本较高且不可试错,因此为打捞工程设计风险评估方法是十分必要的.无论采用何种打捞方式,打捞人员和打捞系统的安全是打捞作业成功的前提.不安全、不稳定或未经验证的打捞系统不仅不能完成打捞任务,还可能导致更大的损失.如何科学定量地评估不同打捞系统的安全性,是实现合理风险控制的关键问题.
在安全性评估方面,研究人员常用的方法是预测作业过程中的极端运动响应或载荷响应,并留出一定的安全裕度,即传统的安全系数法.Kim等[1]根据单向流固耦合(FSI)分析计算得到的最小安全系数来评估转子组件的结构安全性.为了防止滑动和倾覆破坏模式,Chaudhary等[2]研究了如海啸波高、海水水位、地震持续时间等参数对防波堤安全系数的影响.Nguyen等[3]也采用类似的方法评估了牡蛎笼在高潮位、风暴潮和百年一遇极端波浪等恶劣环境条件下系泊缆的安全裕度.Barrera等[4]分析了连接到风力发电机的系泊缆的极端载荷,考虑风力发电机的不同工作状态,提出了系泊缆安全系数的计算方法.这些评估方法可以提供一些参考,但打捞系统仍有其独特的工作要求和特点,即由于价值巨大或者太过脆弱,沉没目标物一般无法承受打捞过程中的剧烈振荡.正因如此,评估指标应当能够表征系统中过程性的运动特点,而不应是常用的单一极值.另外,打捞系统是一个包含多个耦合部件的复杂多体系统,涉及到多个自由度和不同的载荷类型.要全面评估打捞系统的安全性,还应当建立一个合理的能够综合所有自由度和多个物理指标的评估模式.
针对上述问题,本文提出了一种新的三参数半定量安全评估方法.这种方法采用均方根(Root Mean Square,R)、变异系数(Coefficient of Variation,Cv)和响应极值来综合评估母船和系泊缆的安全性及稳定性状态,综合各运动模态响应和不同海况下的组间比较来得到最终评估结果.最后,将该方法应用于不同浪向角及波周期下的打捞作业模拟,求出了合适的打捞作业窗口.
1 打捞系统安全性评估方法
1.1 打捞安全评估控制指标
典型的打捞离底作业可分为3个阶段.
阶段1 (P1) 预提升阶段(准备阶段):用于打捞提升的系泊系统已经部署完毕.提升缆完全松弛,多体系统的动力响应仅包含打捞母船和系泊缆.
阶段2 (P2) 提升阶段:开始大范围的载荷转移,提升力和系泊力共同构成对驳船运动的约束.
阶段3 (P3) 打捞后阶段:沉船与海底分离.可以假设在无海流的情况下,沉船只对打捞船施加一个垂直向下的载荷,大小等于沉船的湿重.
在本文的仿真中,载荷转移发生在P2阶段,而P1和P3中的提升载荷是恒定的.由于P2涉及多介质、多体,一般认为该阶段是整个打捞过程中最复杂的阶段,因此P2是本文研究的重点.
驳船运动和缆张力响应的波动在不同的打捞工况或打捞阶段可能表现出不同的特征.总体而言,模拟结果中存在的一些异常极值是主要的关注点.对于系泊缆的安全评估,只关心其张力极值即可,然而对于打捞船而言,不仅要关注运动幅值,还要关注其随时间变化的振荡特性.因为即使是具有相同极值的两个不同运动过程,也可能具有完全不同的振荡程度.如前所述,打捞过程应尽可能稳定,避免对沉船结构或有价值的沉船载物造成损害.换句话说,相对规则且稳定的运动响应有利于降低船上作业的难度.所以,打捞安全评估系统的开发应该基于整个过程,而不是基于某一点.同时,评估指标必须能够反映结果数据的分布情况.
本文采用R、 Cv和最大绝对值(Maximum Absolute Value,M) 3个统计学参数对不同运动模态和缆绳的安全稳定状态进行判别,其中前两者均是基于过程的参数.需要指出的是,R比均值更适合描述在0附近波动的数据,而Cv能够衡量数据的离散程度.此外,使用Cv而不是标准差是因为不同的运动模态有不同的单位,Cv的归一化性质有助于比较不同运动的振荡程度.R和Cv可以表示为
其中:$s$为样本值;$n$为样本量;$S_{d}$为标准差;$σ$为均值.
1.2 安全评估准则
(1) 不同阶段之间的评估(组内评分).
如果证明提升阶段P2比预提升阶段P1更危险或更不稳定,则意味着提升操作损害了P1中原有系泊系统的安全性.因而所制定的打捞方案是不合理的,需要对打捞系统配置进行修改.本部分的评估准则用于评估提升操作如何影响系泊系统的动力学特性,即比较提升阶段P2和其他两个阶段.该标准建立在半定量评分法的基础上.判据总结如表1所示.某一案例的组内评分等于其每个自由度的安全性和稳定性评分之和.
表1中,安全稳定性评价分为3个等级,对应从“安全/稳定”到“不安全/不稳定”的递进评分为1、2、3.显然,如果P2的运动/张力幅值大于P1和P3,则可以认为提升作业削弱了系泊系统的运动控制效果,即不合理的打捞方案或作业窗口导致系统处于危险状态.相反,在安全提升过程中,P2的运动/张力幅值可能是3个阶段中最小的.也就是说,如果制定的打捞方案或系统配置足够科学合理,那么原本充满风险的提升作业反过来能够约束打捞母船并使原系泊系统更加安全.
表1 相同条件下P2阶段的安全评估准则
Tab.1
| 案例 | 分类 | 标准 | 状态 | 分数 |
|---|---|---|---|---|
| 驳船运动或 缆张力的随 时间的变化 | 安全性评估 | P2阶段的R和M均小于P1和P3阶段 | 安全 | 1 |
| P2阶段的R或M大于P1和P3阶段平均值,但不是整个模拟过程的最大值 | 相对不安全 | 2 | ||
| P2阶段的R或M是整个模拟过程的最大值 | 不安全 | 3 | ||
| 稳定性评估 | P2阶段的Cv小于P1和P3阶段 | 稳定 | 1 | |
| P2阶段的Cv大于P1和P3阶段平均值,但不是整个模拟过程的最大值 | 相对不稳定 | 2 | ||
| Cv的最大值出现在P2阶段 | 不稳定 | 3 |
(2) 不同海况之间的比较评估(组间排名评分).
组间评分用于定性描述工况间的差异.首先不同算例的R和最大绝对值M按大小排序,排序越高,得分越大.这里使用的两个参数是包括P1~P3 3个阶段的全局最大值.每个自由度的组间排名得分(Ranking Score,Sr)等于两个参数的排名得分的平均值.
各自由度评分(DOF Score,SDOF)及总评分(Total Score,ST)可通过计算得出:
其中:
2 模型描述
本文依托于“长江口二号”古沉船打捞的工程实例,对所述的风险评估模型开展具体应用研究.打捞母船为一特制的带月池方形驳船,长120 m,宽34 m,型深9 m,初始吃水3.75 m,空船质量 6 000 t.母船由8根直径0.12 m,质量273.95 kg/m的标准锚链系泊固定.沉船重 9 500 t,长46 m,宽17 m,嵌坐在20 m水下的海底土壤中.利用20套提升机构(布置在月池两侧)完成打捞任务,沉船与母船之间通过提升缆(直径78 mm的钢丝绳)连接.打捞开始后,母船将沉船匀速上提,使之逐渐脱离海底,最终收入月池中运走.
海床土体经工程地质勘察共有4层,由浅至深依次为砂质粉土、淤泥质黏土、黏土和粉质黏土,其中上两层与沉船直接接触.砂质粉土层厚1.04 m,密度1.949 t/m3,孔隙比0.743,饱和度93%;淤泥质黏土层厚17.85 m,密度1.724 t/m3,孔隙比1.364,饱和度98%.土体对沉船起支撑和吸附作用:一方面,沉船被土体所承托;另一方面,当沉船有脱离土体的趋势时,土体将对其施加一定阻力.受到土体和提升行为的影响,离底阶段打捞系统的动力特性将呈现出显著的不同,这种差异亦将在风险分析中体现.本文涉及的物理模型为一多介质多体系统,其构成比较复杂,且所述风险评估模型具有一定的通用性,仅须取动力学模拟所得结果作为分析的输入参数,故为突出本文的研究重点而不对物理模型作过多赘述.相关物理参数、土层分布及性质等均可参考文献[7].
3 不同浪向角下的打捞系统安全性评估
图1
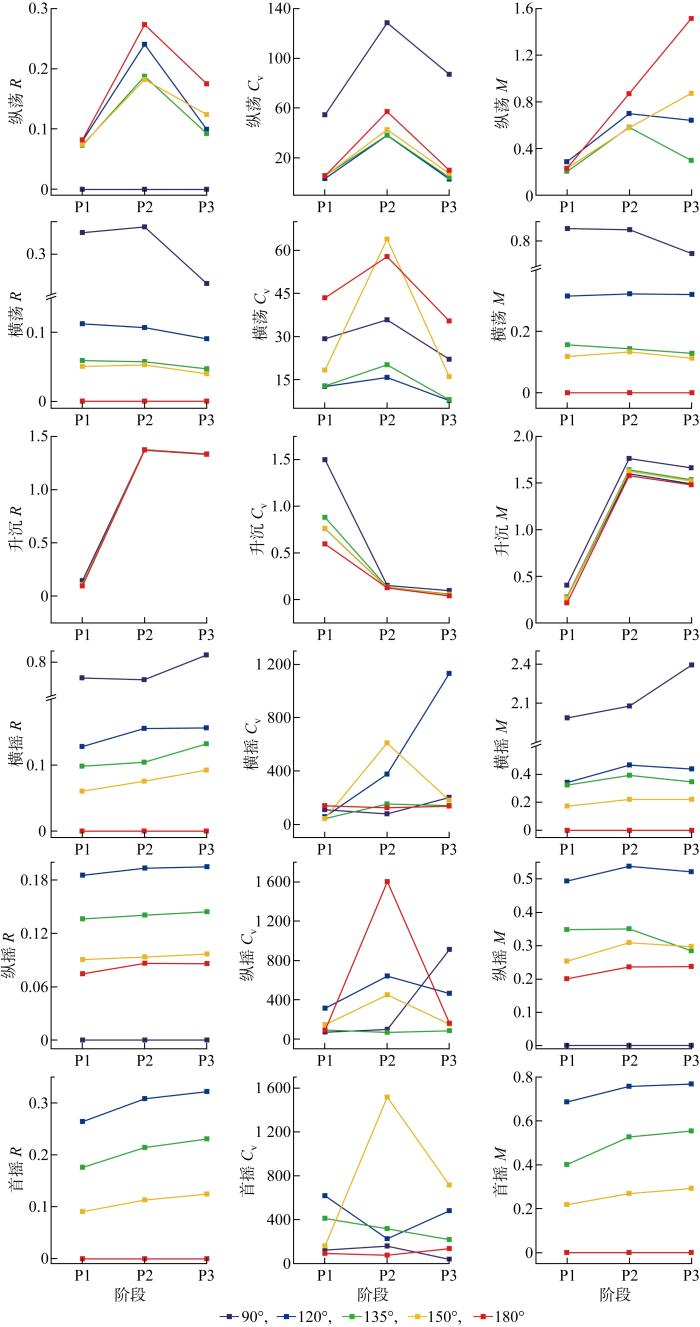
图1
不同波浪入射角下沉船离底过程各阶段的安全性指标变化情况
Fig.1
Barge motion characteristics in the three phases at different incident wave angles
表2 不同入射波向的打捞系统安全性评估
Tab.2
| Dw/(°) | 运动 | 安全性 得分 | 稳定性 得分 | 组内 得分 | 组间 得分 | SDOF | ST |
|---|---|---|---|---|---|---|---|
| 90 | 纵荡 | 1 | 3 | 23 | 1 | 4 | 103 |
| 横荡 | 3 | 3 | 7 | 42 | |||
| 垂荡 | 3 | 1 | 7 | 28 | |||
| 横摇 | 2 | 1 | 7 | 21 | |||
| 纵摇 | 1 | 1 | 1 | 2 | |||
| 首摇 | 1 | 3 | 1.5 | 6 | |||
| 105 | 纵荡 | 3 | 3 | 31 | 3.5 | 21 | 162 |
| 横荡 | 3 | 3 | 6 | 36 | |||
| 垂荡 | 3 | 3 | 4.5 | 27 | |||
| 横摇 | 3 | 1 | 6 | 24 | |||
| 纵摇 | 3 | 3 | 6 | 36 | |||
| 首摇 | 2 | 1 | 6 | 18 | |||
| 120 | 纵荡 | 3 | 3 | 28 | 4.5 | 27 | 151 |
| 横荡 | 2 | 3 | 5 | 25 | |||
| 垂荡 | 3 | 1 | 4 | 16 | |||
| 横摇 | 3 | 1 | 5 | 20 | |||
| 纵摇 | 3 | 3 | 7 | 42 | |||
| 首摇 | 2 | 1 | 7 | 21 | |||
| 135 | 纵荡 | 3 | 3 | 29 | 2.5 | 15 | 121 |
| 横荡 | 2 | 3 | 4 | 20 | |||
| 垂荡 | 3 | 1 | 5.5 | 22 | |||
| 横摇 | 3 | 3 | 4 | 24 | |||
| 纵摇 | 3 | 1 | 5 | 20 | |||
| 首摇 | 2 | 2 | 5 | 20 | |||
| 150 | 纵荡 | 3 | 3 | 33 | 3.5 | 21 | 117 |
| 横荡 | 3 | 3 | 3 | 18 | |||
| 垂荡 | 3 | 1 | 4 | 16 | |||
| 横摇 | 3 | 3 | 3 | 18 | |||
| 纵摇 | 3 | 3 | 4 | 24 | |||
| 首摇 | 2 | 3 | 4 | 20 | |||
| 165 | 纵荡 | 3 | 3 | 31 | 6 | 36 | 90 |
| 横荡 | 3 | 3 | 2 | 12 | |||
| 垂荡 | 3 | 1 | 1.5 | 6 | |||
| 横摇 | 3 | 3 | 2 | 12 | |||
| 纵摇 | 3 | 3 | 2.5 | 15 | |||
| 首摇 | 2 | 1 | 3 | 9 | |||
| 180 | 纵荡 | 3 | 3 | 24 | 7 | 42 | 72 |
| 横荡 | 1 | 3 | 1 | 4 | |||
| 垂荡 | 3 | 1 | 1.5 | 6 | |||
| 横摇 | 1 | 1 | 1 | 2 | |||
| 纵摇 | 3 | 3 | 2.5 | 15 | |||
| 首摇 | 1 | 1 | 1.5 | 3 |
对于纵荡模态,在7种工况中,除了Dw=90° 的工况,R和Cv最大值均出现在P2阶段,证明纵荡运动在提升阶段往往是不安全和不稳定的.这一发现也与上一节描述一致.
对于横荡模态,提升阶段是一个不稳定的阶段,因为所有工况的Cv均在P2达到最大值.但R和M的变化不如Cv显著,只有Dw=90° 的时候R出现了明显的峰值.
对于垂荡模态,不同工况的R变化很小,而运动最大幅值变化较大,90° 工况下的垂荡幅值最大.这揭示了虽然Dw对垂荡均值影响不大,但一些极值仍需重点关注.此外,P2阶段的Cv明显低于P1阶段,表明提升行为有效抑制了驳船运动在垂直方向上的波动.综上所述,P2中母船的垂向运动是一个连续且相对“平稳”的下降过程.
横摇、纵摇和首摇3种旋转运动状态在3个阶段中变化均相对较小.各工况间最显著的差异在于最大运动幅度和变异系数的变化趋势.下面基于评分来描述这种复杂的趋势.
由于打捞系统的对称性,仅取一个象限内的波进行讨论.最大的组内得分出现在150°浪向角的情况下,表明提升操作的引入对原系泊系统(驳船和系泊缆)造成了较大的扰动.然而,若与其他各组工况作横向对比,其并不是危险的情况,因为150° 工况在所有自由度上的运动都相对较小.相反,120° 浪向角的情况由于其纵荡、纵摇和首摇幅值较大而呈现出最高的总得分,表明该情况在工程实施中需要特别注意.此外,随着浪向角从120° 增加到180°,安全性总分降低.因此,波向为180° 的工况是较为理想的工况.
将不同浪向下6个自由度的安全性得分绘于图2中,总得分分布如图3所示.首先,依据专家和工程技术人员的咨询经验设定了3个可接受的评分阈值:① 对于平动模式(纵荡、横荡、垂荡).安全稳定性评分低于2 分,组间排名评分低于4分,自由度总评分低于16分.② 各转动模式(横摇、纵摇和首摇).安全稳定性评分低于3 分,组间排名评分低于4分,DOF评分低于24分.③ 总分低于120分(由阈值①和②计算得到).所有的阈值都在图中用虚线标出.评分值超过指定阈值的区域用灰色阴影填充.因此,阴影覆盖的角度间隔是不安全的.对于不同的运动模态,安全评分对浪向的敏感度也不同.对于纵荡,只有90° 和270° 附近的两个小区间满足安全判据.然而,对于横摇和首摇,几乎所有浪向都是安全的.图3显示了最终6个自由度整合后的总评结果,理想的“安全范围”用浅绿色填充.总体而言,(150°, 210°)和(330°,30°)两个角度区间是比较理想的角度范围,可认为是合理的作业窗口.90° 和270° 相邻区域的两块也相对安全,但区间太窄.为此,它们仅在纵荡运动需要特别控制时才推荐使用.
图2
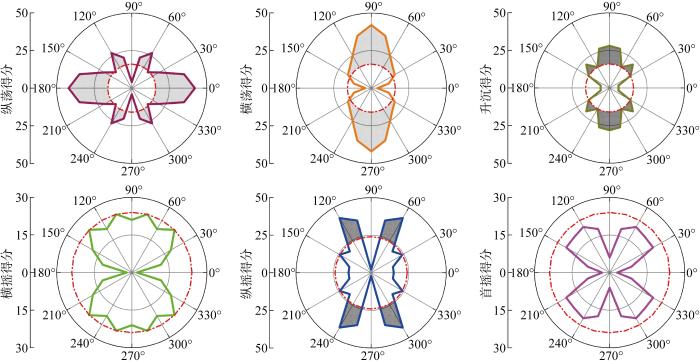
图2
不同浪向下驳船6个自由度运动的安全性得分结果
Fig.2
Distribution of six DOF scores of different wave headings
图3
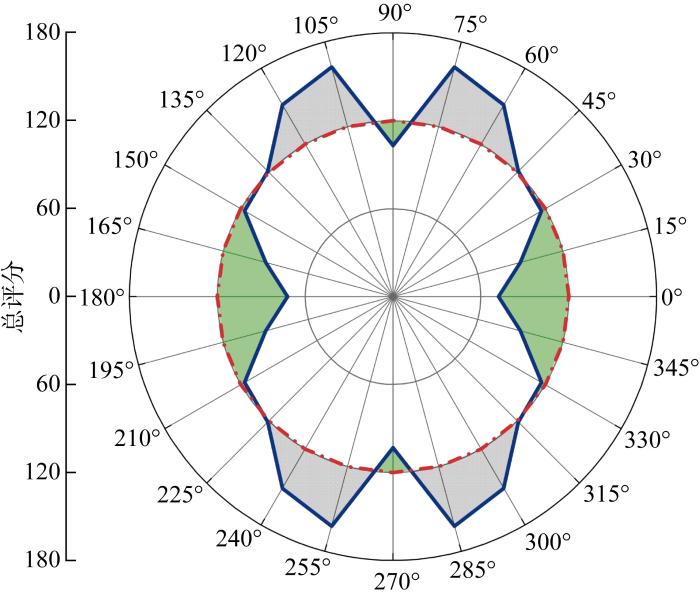
图3
驳船在不同浪向下的安全性评估总得分
Fig.3
Distribution of total safety assessment score of different wave headings
8根系泊缆的最大张力曲线如图4所示.张力值均未超过断裂载荷,因此所有系泊缆都是安全的.除个别异常值外,大部分曲线随浪向角的增大大致呈减小趋势.由图4可知,Dw=105° 的海况可能是危险的情况,因为最大系泊张力发生在该海况下(位于系泊缆#6),且系泊缆#3、系泊缆#4、系泊缆#5、系泊缆#6的张力值均在Dw=105° 时达到峰值.此外,根据一般经验判断,随着沉船对驳船的约束加强,系泊缆绳上的张力应逐渐减小,因此P1阶段的张力应为3个阶段中的最大值,而P3阶段的张力应为最小值.然而该情况只适用于系泊缆#2.对于系泊缆#1、系泊缆#4、系泊缆#5、系泊缆#8,当Dw=105° 时,情况正好相反.出现这种情况的原因是在提升状态下,提升缆和系泊缆共同构成了对母船的约束,同时呈现此消彼长的制衡关系,因此使得其上张力的变化规律变得更加复杂.
图4
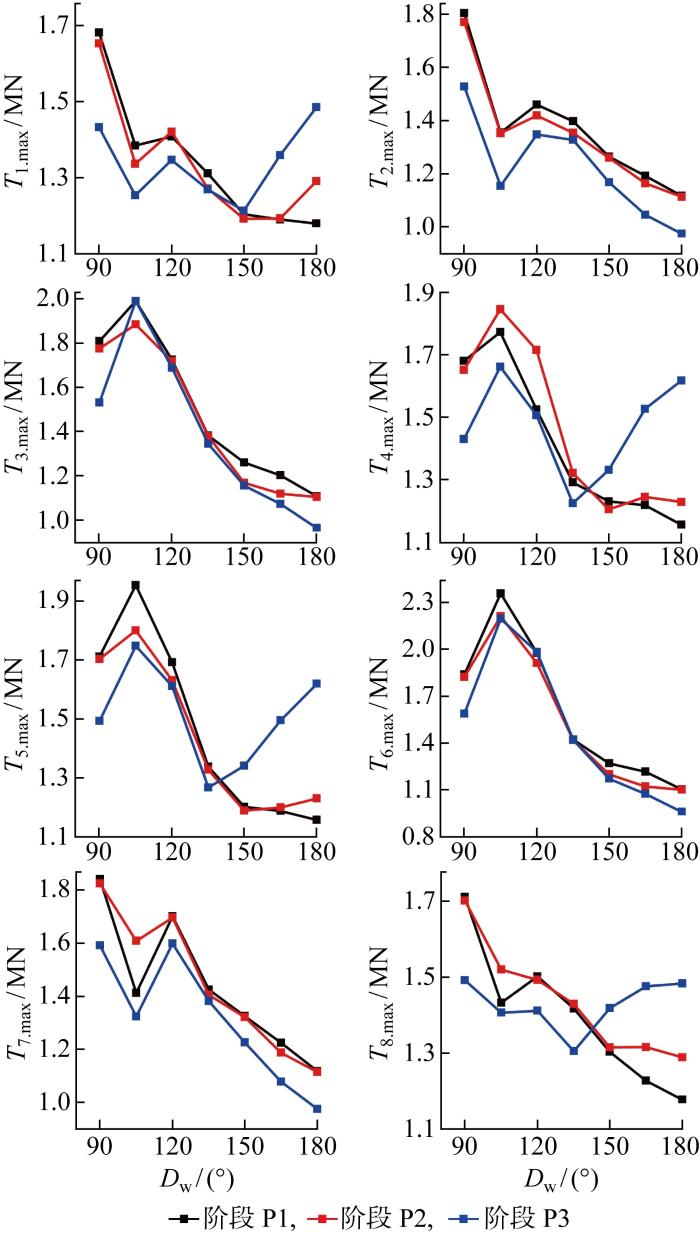
图4
不同浪向下各系泊缆最大张力的变化情况
Fig.4
Maximum mooring tensions affected by different wave directions in the three phases
4 结论
本文提出了一种新的沉船打捞离底过程安全评估流程.该方法同时考虑极端响应和振荡特性,以更好地量化系统响应的风险因素.不同的运动模态或系泊缆在打捞过程中受到的影响是不同的.本文的工作流程将大量不同变量的结果数据整合成一个统一的总分评价,使其能够简单有效地应用于工程实践.
从结果中可得以下结论:
(1) 150° 浪向海况下的系泊行为对原系泊系统的扰动最小;根据评估分数,180° 浪向是沉船打捞可能的最理想海况.
(2) 找到了4个适于实施打捞作业的波浪入射角范围,其中(150°, 210°)和(330°,30°)两个波浪入射角区间较宽,更具优势.
(3) 虽然在当前海况下,各系泊缆张力均处于安全范围内,但105° 浪向可能成为危险的作业状态,因为全局峰值系泊张力在此海况下出现.
最后,评分标准基于相关行业从业者、研究者和专家等不同视角,难免带有一定的主观性.在后续的研究中,将不断优化和完善工作流程.
参考文献
A study on the design assessment of 50 kW ocean current turbine using fluid structure interaction analysis
[J].DOI:10.1088/1755-1315/15/4/042037 URL [本文引用: 1]
Sliding and overturning stability of breakwater under combined effect of earthquake and tsunami
[J].DOI:10.1016/j.oceaneng.2017.03.021 URL [本文引用: 1]
Monitoring of ship damage condition during stranding
[J].DOI:10.1016/j.marstruc.2011.02.006 URL [本文引用: 1]
The influence of wave parameter definition over floating wind platform mooring systems under severe sea states
[J].DOI:10.1016/j.oceaneng.2018.11.018 URL [本文引用: 1]
A subjective modelling tool applied to formal ship safety assessment
[J].DOI:10.1016/S0029-8018(99)00037-2 URL [本文引用: 1]
基于底质力时历计算的沉船打捞离底过程动力特性分析及系泊系统优化
[J].
Dynamic characteristics analysis and mooring system optimization of wreck salvage in off-bottom stage based on seabed resistance force time history
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}