

用于肠道机器人的WPT系统,面临以下挑战:① 具有主动运动能力的多功能CR具有直流电机、图像模块等器件,功率需求较高;② 能量接收线圈(PRC)与能量发射线圈(PTC)尺寸差异较大,且能量传输距离远,导致耦合程度弱,传输效率低;③ CR在肠道内的位置不固定,活动范围较大,因此需要PTC具有较为均匀的磁场范围;④ CR在肠道内的姿态不固定,因此需要WPT系统具有多维能量传输的能力.
提出一种相对简单的产生空间三维磁场的方案,设计一种结构紧凑的混合式发射线圈结构,不同于电流幅度控制、相位控制等复杂的控制策略,该结构仅使用单个电源驱动,利用二维线圈的旋转产生覆盖三维空间范围磁场的效果;对该发射线圈的特性进行了研究,证明了该方案的可行性.
1 肠道机器人的WPT系统
使用CR的胃肠道诊查系统主要由3部分组成:主动式CR、WPT系统和远程控制终端.图1展示了所设计的用于CR的WPT系统应用场景.能量从体外的PTC通过近场感应耦合传输到缠绕于CR内部的PRC,由于CR在体内的位置及姿态并不固定,传输距离较远,以及PRC和PTC的尺寸差异较大,导致能量传输为松耦合,耦合系数较小,传输效率较低.PRC侧接收到的交流感应电压经过全桥整流,稳压滤波后为负载供电.将CR搭载的图像模块采集到的视频信号通过射频传输到上位机终端,医生可以远程操控CR以实现各项功能.WPT系统的集总参数等效电路模型如图2所示.其中:PWM为输入的方波信号;Udc为直流电压;Ut为逆变电路输出的交变电压信号;It为发射侧电流;Ct为发射侧调谐电容;Lt为发射线圈电感;Rt为发射线圈等效电阻;Ir为接收侧电流;Cr为接收侧调谐电容;Lr为接收线圈电感;Rr为接收线圈等效电阻;RL为负载电阻;M为PTC和PRC之间的互感.
图1
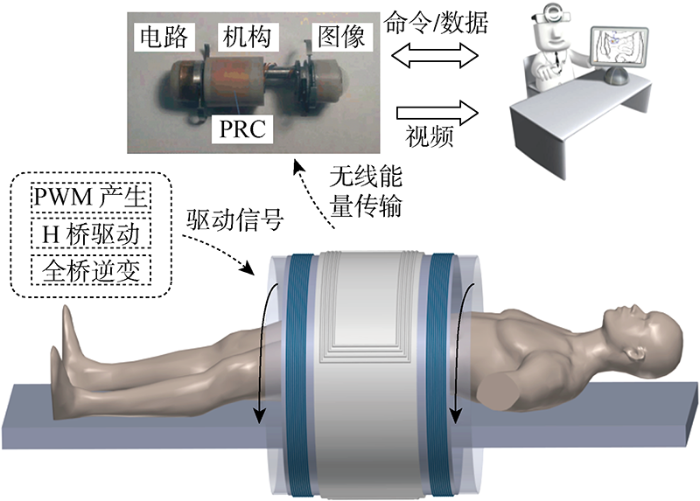
图1
所设计的用于CR的WPT系统应用场景
Fig.1
Application scenario of designed WPT system for CR
图2
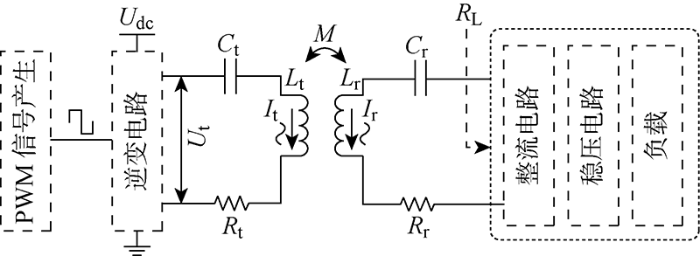
图2
用于CR的WPT系统的典型等效电路模型
Fig.2
Typical equivalent circuit model of WPT system for CR
PTC和PRC之间的角频率为ω.对于松耦合的WPT,选择串联谐振补偿电路是因为其具有更好的负载性能[13].WPT系统的发射侧和接收侧分别通过调谐电容Ct(发射侧)和Cr(接收侧)进行补偿,谐振在相同频率以最大化传输效率(PTE).传输效率η是负载功率与发射功率之比,可通过下式获得:
式中:PL为负载功率;Pt为发射功率;k为发射线圈和接收线圈间的耦合系数;Qt为发射线圈品质因数;QrL为接收线圈带负载品质因数;QL为负载品质因数.
2 发射线圈建模
2.1 亥姆霍兹线圈对
图3
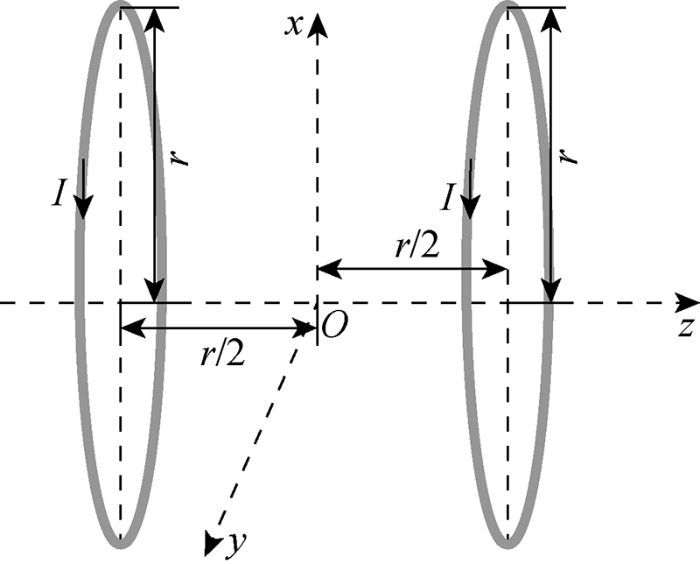
式中:r为线圈半径;I为线圈电流;μ0为真空磁导率;θ为线圈上某一点与x轴正方向形成的夹角;i, j, k为x, y, z轴所对应的单位向量.因此,对于每侧N匝对称放置的HCP,其磁感应强度表达式如下:
式中:Bx,HCP,By,HCP,Bz,HCP为HCP磁感应强度沿着x,y,z轴的分量.
2.2 鞍形线圈对
由于HCP要求线圈间距等于线圈半径,在一些对尺寸有限制的场合下缺乏灵活性和实用性,所以使用了一种新的PTC形式,即鞍形表面线圈对(SSCP),以产生与HCP磁场方向垂直的磁场,且该线圈形式可以与HCP有效组合,极大程度减小组合线圈的空间体积.SSCP示意图如图4所示.其中:a为SSCP的轴向宽度;b为鞍形线圈两直线边的距离;h为SSCP中两线圈的间距;θ0为SSCP所对应的中心角;BSSCP为SSCP产生的磁感应强度.SSCP由对称缠绕在圆柱表面上的一对鞍形线圈组成,其中具有相同方向的电流能够产生叠加的增强磁场.
图4
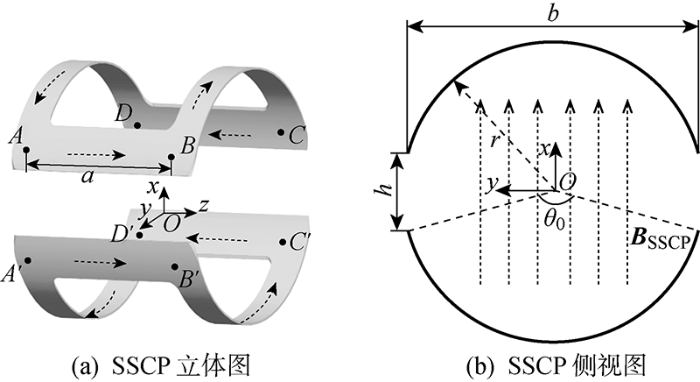
SSCP的圆弧几何结构使得磁感应强度表达式的计算更加复杂.整个线圈路径可分为8个部分,即图4(a)中的圆弧
式中: Bmn为其下标对应的圆弧及线段的磁感应强度.但如此一来,计算表达式会变得冗长复杂,因此将采用数值仿真的方法进一步分析.
3 发射线圈特性分析
任一点(x,y,z)产生的磁感应强度Bi(x, y, z)相对于坐标系原点磁感应强度Bi(0, 0, 0)的不均匀性可定义为
i∈{x, y, z}
在本文中,HCP和SSCP的直径均设置为 600 mm,以容纳标准体型的成年人进入,并且可以保证与线圈有足够的距离.对于SSCP,两个重要的参数为纵横比α=a/(2r)以及中心角θ0.不同的纵横比和中心角会对磁场的均匀性产生影响[15].α=2和 θ0=120°的组合理论上可以使得磁场均匀性最优,然而实际应用中,由于尺寸限制,该理想条件往往无法满足.在本文中,考虑到实际尺寸的限制,设置α=1.5,θ0=120°,SSCP磁感应强度不均匀性的数值仿真结果如图5所示,相同半径下的HCP的磁感应强度不均匀性如图6所示.其中:δx为磁感应强度沿x轴分量的不均匀性;δz为磁感应强度沿z轴分量的不均匀性.由于HCP和SSCP具有对称性,所以选择yOz平面作为测试平面.
图5
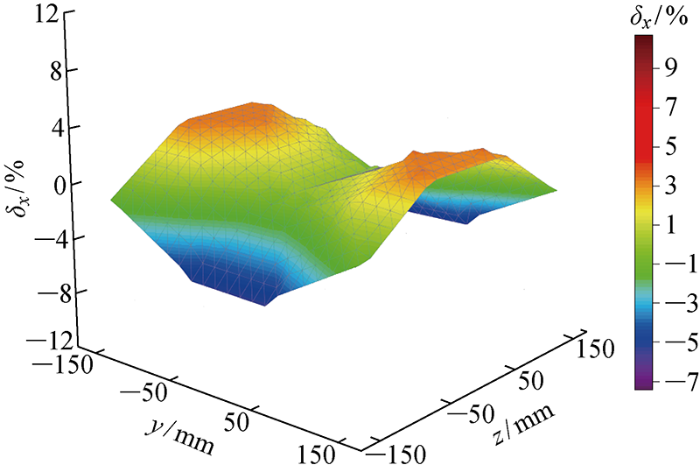
图5
SSCP在测试区域内的不均匀性仿真结果
Fig.5
Non-uniformity simulation results of SSCP in the test area
图6
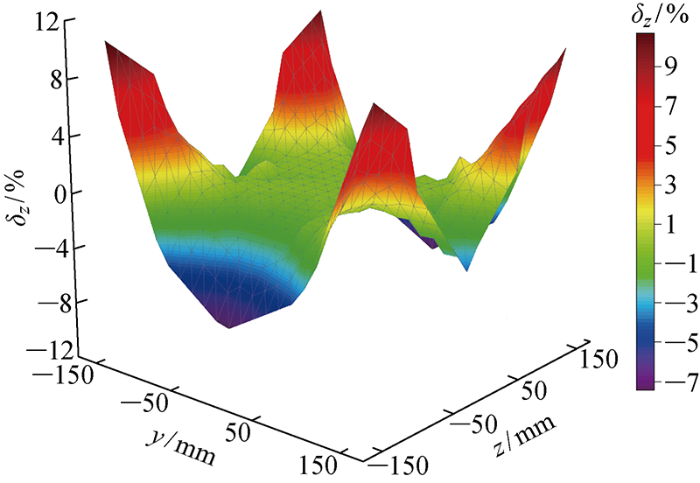
图6
HCP在测试区域内的不均匀性仿真结果
Fig.6
Non-uniformity simulation results of HCP in the test area
考虑到PRC可以在人体腹部约200 mm×200 mm 区域内自由移动,PTC应产生相对均匀的交变磁场,以确保PRC能够在不同位置接收到稳定的功率.因此,考虑到患者体型的差异和卧位的不确定性,测试区域被指定为300 mm×300 mm的范围.通过Maxwell的仿真结果可以得知,HCP测试区域的磁场分布呈现中部平坦,在靠近平面的4个角的位置出现较大起伏,而SSCP的磁场分布整体是波动的,但总体而言,SSCP的波动范围相对小于HCP.对于本应用来说,均匀性均在可以接受的范围内.
图7
图8
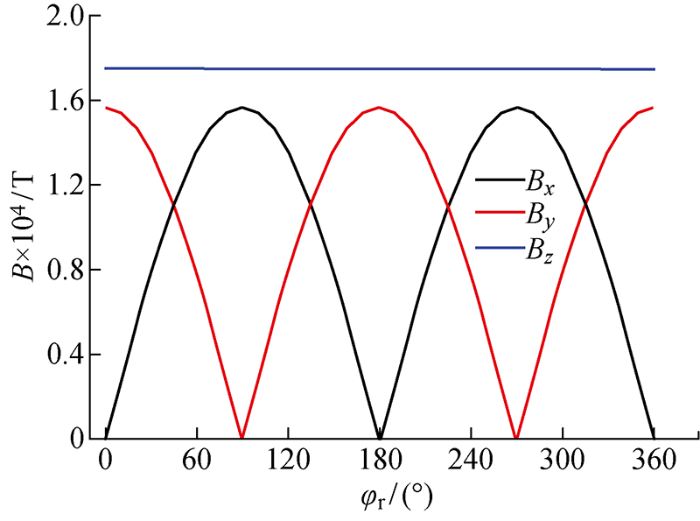
图8
不同旋转角下沿坐标轴向磁感应强度
Fig.8
Magnetic induction intensities along coordinate axis at different rotation angles
4 实验验证与分析
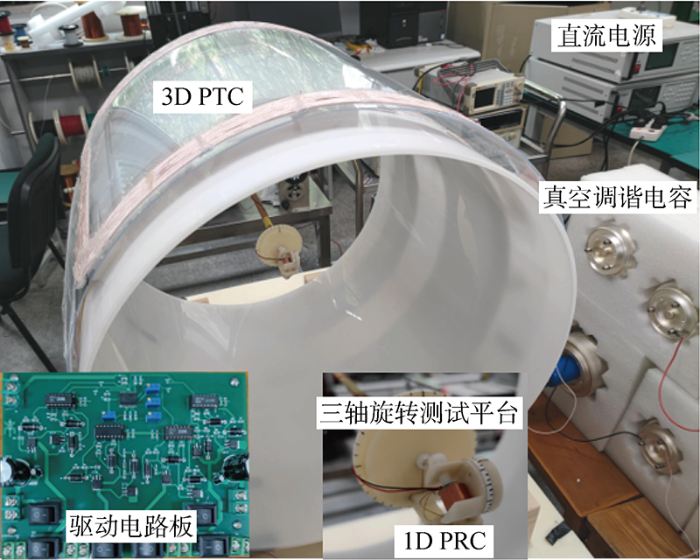
所制作的验证原型和实验设置如图9所示.为了减小趋肤效应和临近效应带来的涡流损耗,使用300股AWG44利兹线代替传统的实心铜线绕制了所提出的PTC的原型,HCP和SSCP的匝数均设置为30.利用所设计的三轴旋转试验台可以方便地实现PRC的三维角度变化.所有框架均由亚克力材料制成,以提供良好的绝缘性能.根据之前工作[16-18]中的实验经验,选择218 kHz作为较合适的谐振频率.测试的PRC为⌀11.5 mm×11.5 mm的单维空心圆柱线圈,内侧附有锰锌铁氧体磁芯,以增强耦合.与文献[16,19]中所使用的类似,PRC的形状和大小使其适用于大多数的CR.在PRC的整流输出端串联一个典型值为21.6 Ω的负载电阻以模拟实际运行时CR的等效负载.根据仿真结果,将HCP和SSCP的驱动电流设置为2 A.
图9
首先,分别对HCP和SSCP的位置均匀性和角度均匀性进行了测试,接收电压均匀性可以通过负载接收电压的均匀系数评价,并可以通过类似式(9)的方式定义:
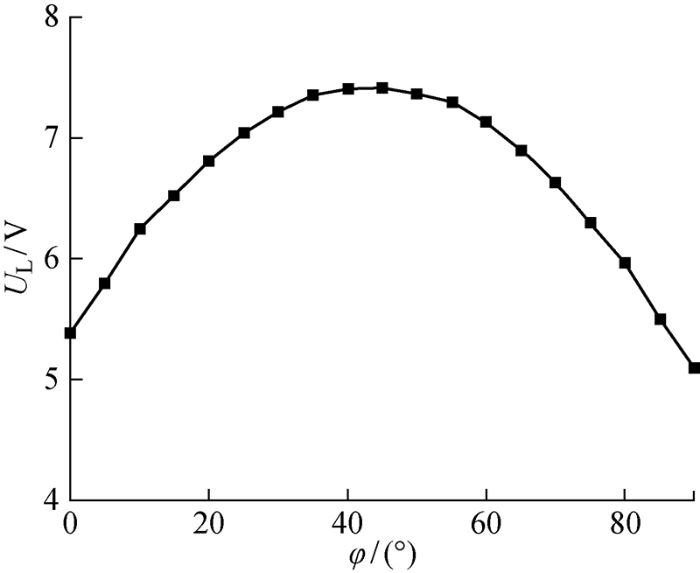
式中:γL(x, y, z, φ)为负载均匀系数;UL(x, y, z, φ)为任意点任意偏移角下的负载接收电压;φ为偏移角,是PRC的轴向与z轴正方向所成的夹角;φ0为参考角,始终保证PRC的轴向处在xOz平面内,且混合线圈没有发生旋转,即PTC的旋转角φr为0.对于HCP和SSCP,沿着x,y,z轴的位置均匀性被分别测试,接收电压和位置均匀性如图10和11所示.由图10可知,PRC的轴向始终平行于z轴,意味着没有角度偏移(φ=φ0=0°),同样由图11可知,PRC的轴向始终平行于x轴(φ=φ0=90°).对于SSCP,y轴上的位置均匀性优于其他两个轴,并且沿x轴和z轴呈现相反的趋势,位置均匀性的最小值为88.1%.在SSCP的中心,输送至负载的功率(PDL)达到 1204 mW,PTE为3.44%.对于HCP,位置均匀性的最小值为92.2%.在HCP中心,PDL达到 1341 mW,PTE为4.16%. 将HCP和SSCP串联,使用单个直流源在2 A的激励下,PRC在不同偏移角下的接收电压如图12所示,在接近45° 的位置能够获得最大的接收电压.
图10
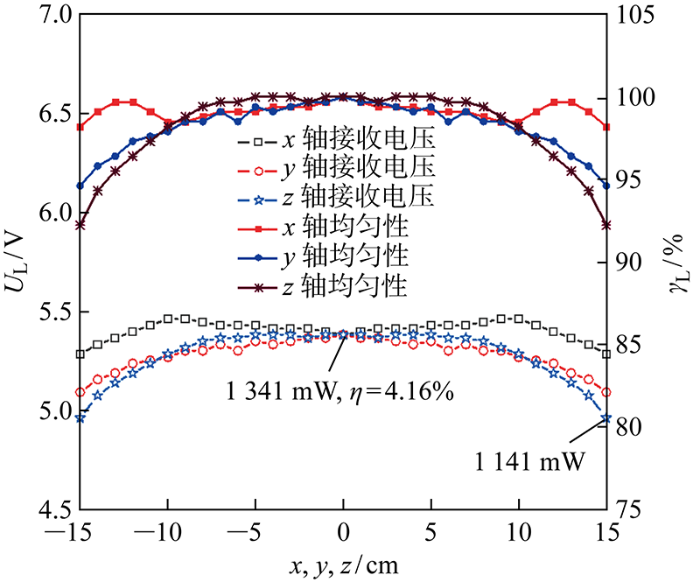
图10
HCP的接收电压和位置均匀性测试
Fig.10
Receiving voltage and positional uniformity test for HCP
图11
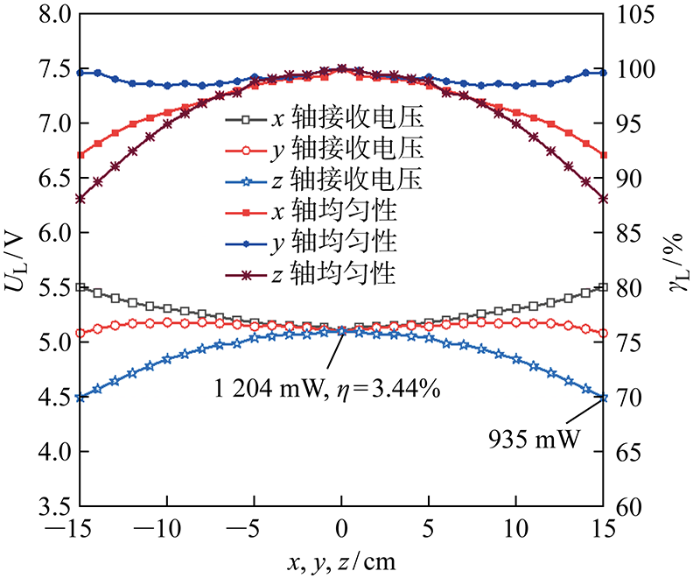
图11
SSCP的接收电压和位置均匀性测试
Fig.11
Receiving voltage and positional uniformity test for SSCP
图12
5 结语
提出一种用于肠道机器人的新型混合式三维发射线圈结构,通过特性分析和实验表明,本文所提出的PTC形式可以产生较为均匀的多维度空间磁场.由于结构的对称性,结合绕轴向的旋转,使用单个独立电源即可实现二维平面磁场到三维空间磁场的扩展,并且具有紧凑简单的线圈结构,不占用空间.其亦可通过使用电流以及相位控制的方式实现特定方向的磁场或者旋转磁场的效果,具有较好的适用性和应用前景.
参考文献
Design and testing of a novel gastrointestinal microrobot
[J].DOI:10.1007/s10544-019-0454-1 [本文引用: 1]
A novel expanding mechanism of gastrointestinal microrobot: Design, analysis and optimization
[J].
DOI:10.3390/mi10110724
URL
[本文引用: 1]

In order to make the gastrointestinal microrobot (GMR) expand and anchor in the gastrointestinal tract reliably, a novel expanding mechanism of the GMR is proposed in this paper. The overlapping expanding arm is designed to be used to increase the variable diameter ratio (ratio of fully expanded diameter to fully folded diameter) to 3.3, which makes the robot more adaptable to the intestinal tract of different sections of the human body. The double-layer structure of the expanding arm increases the contact area with the intestine, reducing the risk of intestinal damage. The kinematics and mechanical model of the expanding arm are established, and the rigid velocity, rigid acceleration, and expanding force of the expanding arm are analyzed. The elastodynamics model of the expanding arm is established. Through the finite element analysis (FEA), the velocity, acceleration, and the value and distribution of the stress of the expanding arm under elastic deformation are obtained. Based on the elastodynamics analysis, the structure of the expanding arm is optimized. By the structure optimization, the thickness of the expanding mechanism is reduced by 0.4mm, the weight is reduced by 31%, and the stress distribution is more uniform. Through the mechanical test, the minimum expanding force of the expanding mechanism is 1.3 N and the maximum expanding force is 6.5 N. Finally, the robot is tested in the rigid pipeline and the isolated intestine to verify the reliability and safety of the expanding mechanism.
微型肠道机器人扩张机构与能量接收线圈的设计与实验
[J].
Design and experiment of expanding mechanism and power receiving coil for micro intestinal robot
[J].
Design and testing of a motor-based capsule robot powered by wireless power transmission
[J].DOI:10.1109/TMECH.2015.2497083 URL [本文引用: 1]
Application of wireless power transmission systems in wireless capsule endoscopy: An overview
[J].
DOI:10.3390/s140610929
PMID:24949645
[本文引用: 1]
Wireless capsule endoscopy (WCE) is a promising technology for direct diagnosis of the entire small bowel to detect lethal diseases, including cancer and obscure gastrointestinal bleeding (OGIB). To improve the quality of diagnosis, some vital specifications of WCE such as image resolution, frame rate and working time need to be improved. Additionally, future multi-functioning robotic capsule endoscopy (RCE) units may utilize advanced features such as active system control over capsule motion, drug delivery systems, semi-surgical tools and biopsy. However, the inclusion of the above advanced features demands additional power that make conventional power source methods impractical. In this regards, wireless power transmission (WPT) system has received attention among researchers to overcome this problem. Systematic reviews on techniques of using WPT for WCE are limited, especially when involving the recent technological advancements. This paper aims to fill that gap by providing a systematic review with emphasis on the aspects related to the amount of transmitted power, the power transmission efficiency, the system stability and patient safety. It is noted that, thus far the development of WPT system for this WCE application is still in initial stage and there is room for improvements, especially involving system efficiency, stability, and the patient safety aspects.
Review of near-field wireless power and communication for biomedical applications
[J].DOI:10.1109/Access.6287639 URL [本文引用: 1]
Near field wireless powering of deep medical implants
[J].
DOI:10.3390/en12142720
URL
[本文引用: 1]
This study deals with the inductive-based wireless power transfer (WPT) technology applied to power a deep implant with no fixed position. The usage of a large primary coil is here proposed in order to obtain a nearly uniform magnetic field inside the human body at intermediate frequencies (IFs). A simple configuration of the primary coil, derived by the Helmholtz theory, is proposed. Then, a detailed analysis is carried out to assess the compliance with electromagnetic field (EMF) safety standards. General guidelines on the design of primary and secondary coils are provided for powering or charging a deep implant of cylindrical shape with or without metal housing. Finally, three different WPT coil demonstrators have been fabricated and tested. The obtained results have demonstrated the validity of the proposed technology.
Two-and three-dimensional omnidirectional wireless power transfer
[J].DOI:10.1109/TPEL.2014.2300866 URL [本文引用: 1]
Analytical and experimental investigations of omnidirectional wireless power transfer using a cubic transmitter
[J].DOI:10.1109/TIE.2017.2733470 URL [本文引用: 1]
Miniaturized 3-D cross-type receiver for wirelessly powered capsule endoscopy
[J].DOI:10.1109/TMTT.22 URL [本文引用: 1]
Three-dimensional power receiver for in vivo robotic capsules
[J].
肠道机器人三维接收线圈的设计与优化
[J].
Design and optimization of three-dimensional receiving coils for intestinal robots
[J].
Power transmission for gastrointestinal microsystems using inductive coupling
[J].Much research on the development of a robotic capsule and microrobot for the diagnosis of gastrointestinal diseases has been carried out. The powering of these microsystems is becoming very important as the implementation of such systems is becoming more feasible by advances in relevant technologies. A wireless power transmission system employing two coils, based on inductive coupling, is discussed in this note. The coupling coefficient between the two coils was measured on axial, lateral and pitch misalignment. The power transmission efficiency was deduced and optimized by selecting proper tuning capacitors and transmission frequency. A serial resonant circuit (SRC) on a receiving side is more adaptive by comparison with parallel resonant circuit (PRC) topology. A multi-receiving coil structure was proposed and examined in an attempt to resolve the orientation indetermination problem of a receiving coil. Experiments show that a dc power level up to 170 mW, with an efficiency of 1.3%, could be steadily received when the receiving coil was placed at the center of the transmitting coil, which can meet the requirement for electric power of some microsystems.
Analyzing the uniformity of the generated magnetic field by a practical one-dimensional Helmholtz coils system
[J].DOI:10.1063/1.4813275 URL [本文引用: 1]
Novel nested saddle coils used in miniature atomic sensors
[J].DOI:10.1063/1.5036605 URL [本文引用: 1]
Analytical model and optimized design of power transmitting coil for inductively coupled endoscope robot
[J].DOI:10.1109/TBME.2015.2469137 URL [本文引用: 1]
A capsule robot powered by wireless power transmission: Design of its receiving coil
[J].DOI:10.1016/j.sna.2015.08.021 URL
用于肠道机器人的螺旋式平板发射线圈对设计
[J].
Design of spiral flat transmitting coil pair for intestinal robot
[J].DOI:10.37188/OPE.20212901.0084 URL
A wireless capsule robot with spiral legs for human intestine
[J].
DOI:10.1002/rcs.1520
PMID:23843276
[本文引用: 1]
As an attractive alternative to traditional diagnostic techniques, wireless capsule endoscopy (WCE) can be considered a disruptive technology.This paper presents a wirelessly powered micro-robot based on the Archimedes spiral with high integration of an active locomotion module.A WCE prototype was fabricated and tested. Including the video camera and end cap, the outer dimensions of the capsule were diameter (Φ) 16 mm, length 45 mm. Experiments demonstrated that the anchoring force can overcome 2.6 N wrap force on each leg. The anchoring force was improved to 1.486 with textured legs. A series of ex vivo experiments evaluated capsule performance and ability to traverse the intestine at an average speed of 2.3 cm/min. The wireless power transmission utilized a cylinder ferrite-core in the receiving coil-set, which significantly improved the coupling efficiency (to 12%) in the direction close (and parallel) to the transmitting coil.Although improvements of the wireless power transmission should target increased stability, this WCE device is both safe and practical for endoscopy.Copyright © 2013 John Wiley & Sons, Ltd.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}