Journal of Shanghai Jiao Tong University ›› 2024, Vol. 58 ›› Issue (4): 468-480.doi: 10.16183/j.cnki.jsjtu.2022.314
• Electronic Information and Electrical Engineering • Previous Articles Next Articles
HAO Liang, HUANG Yinghao, YAO Lixiu, CAI Yunze( )
)
Received:2022-08-15
Revised:2022-09-28
Accepted:2022-10-17
Online:2024-04-28
Published:2024-04-30
CLC Number:
HAO Liang, HUANG Yinghao, YAO Lixiu, CAI Yunze. An Adaptive Maneuvering Target Tracking Algorithm Based on Fuzzy Inference[J]. Journal of Shanghai Jiao Tong University, 2024, 58(4): 468-480.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2022.314
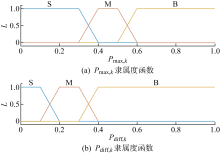
Fig.1
Inputs variable membership function of main model reliability inference

Tab.1
Rules of reliability fuzzy inference of main model
| n | Pmax,k | Pdiff,k | |
|---|---|---|---|
| 1 | S | S | 0.3Pmax,k |
| 2 | S | M | 0.3Pmax,k |
| 3 | S | B | 0.5Pmax,k+0.2Pdiff,k+0.3 |
| 4 | M | S | 0.5Pmax,k+0.2Pdiff,k+0.3 |
| 5 | M | M | 0.5Pmax,k+0.2Pdiff,k+0.3 |
| 6 | M | B | 0.5Pmax,k+0.2Pdiff,k+0.3 |
| 7 | B | S | 0.5Pmax,k+0.2Pdiff,k+0.3 |
| 8 | B | M | 0.3Pmax,k+0.5 |
| 9 | B | B | 0.3Pmax,k+0.5 |
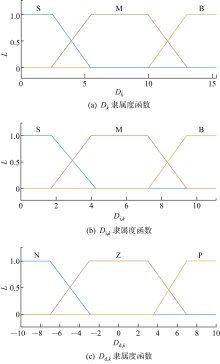
Fig.2
Inputs variable membership function of maneuvering discrimination inference
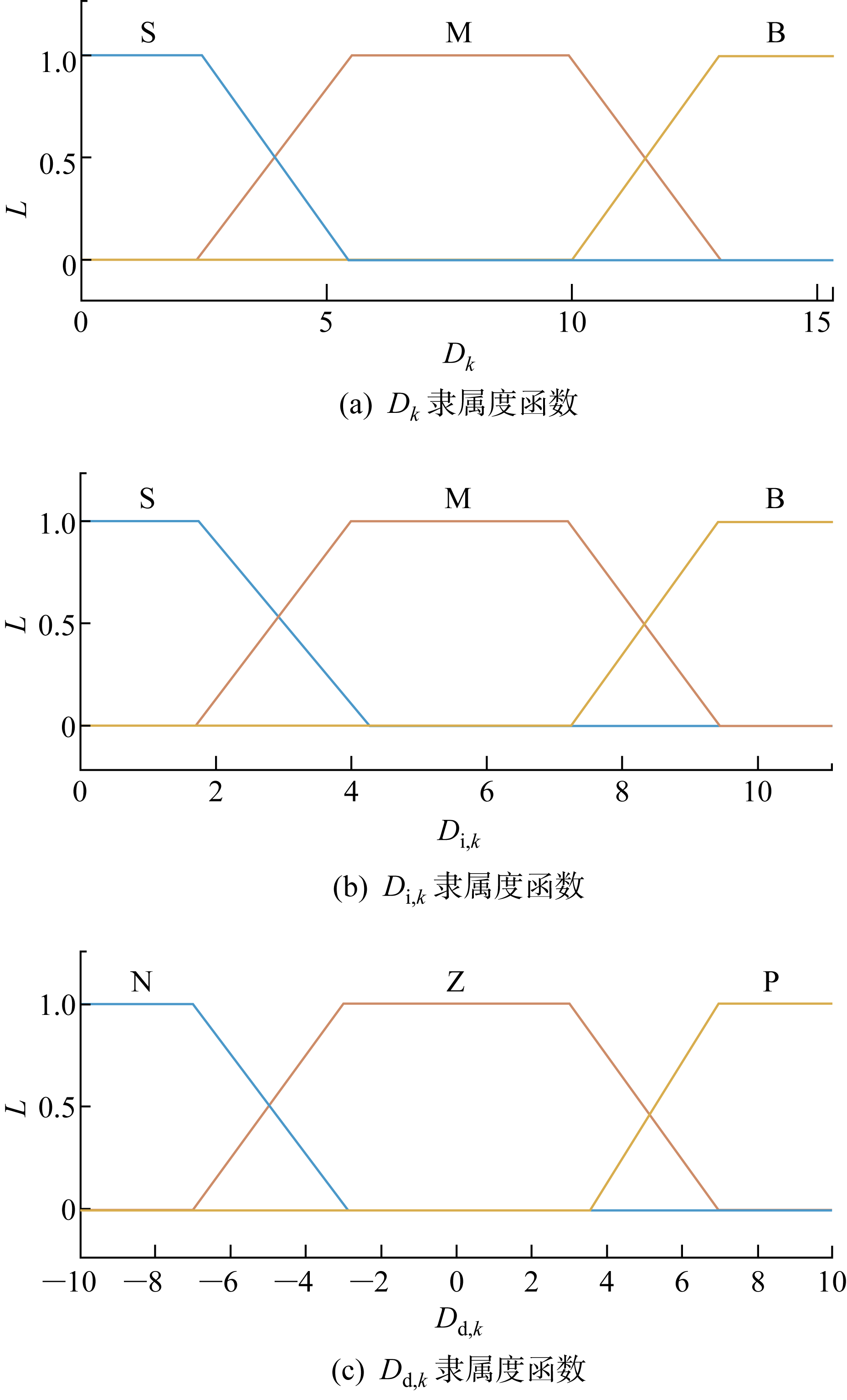

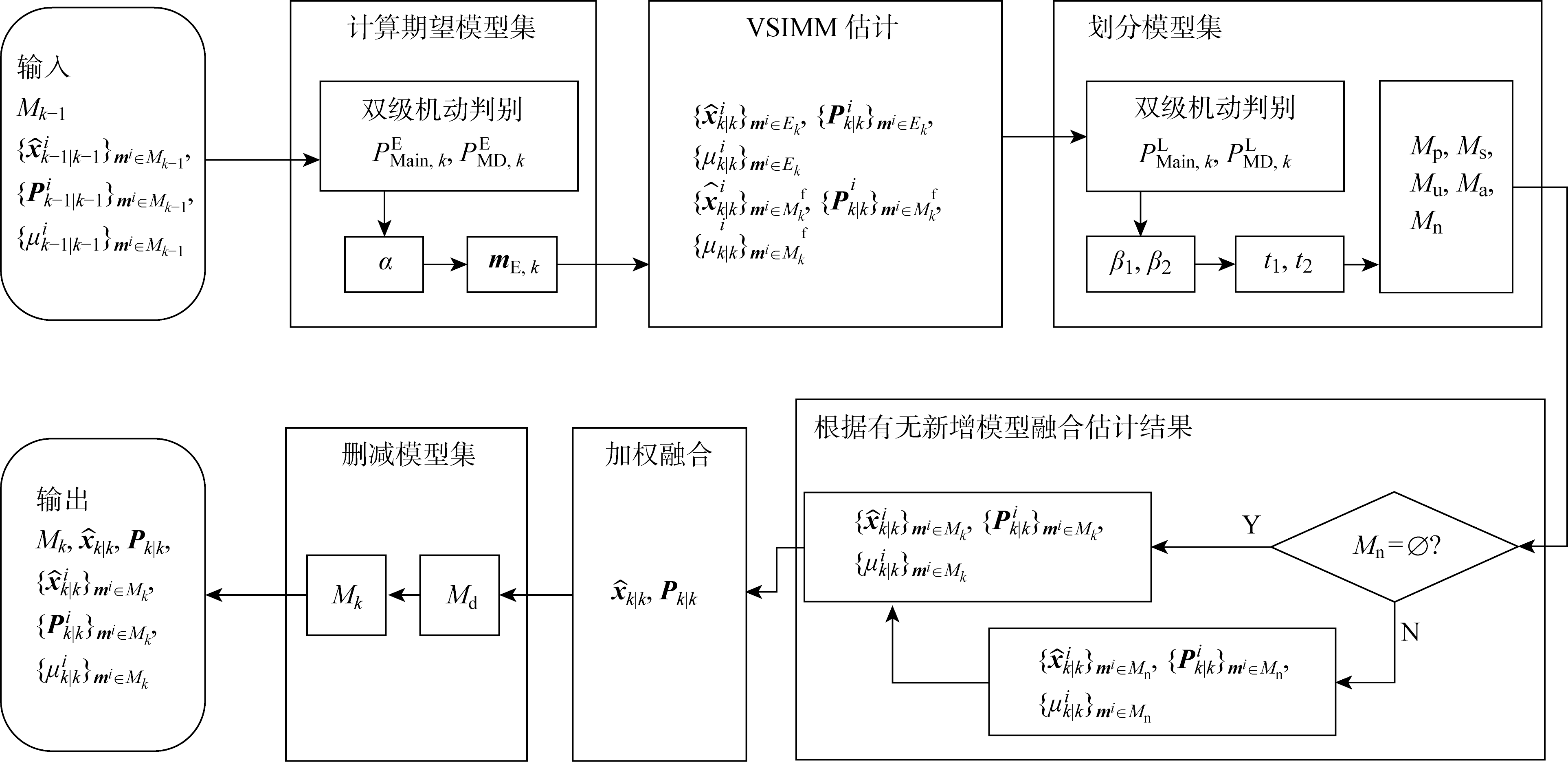
Fig.3
Flow chart of fuzzy inference-based EMA-LMS algorithm
Tab.2
Variation of target acceleration in two scenarios
| k/s | 场景1 | 场景2 | |||
|---|---|---|---|---|---|
| ax/(m·s-2) | ay/(m·s-2) | ax/(m·s-2) | ay/(m·s-2) | ||
| 1~50 | 0 | 0 | 0 | 0 | |
| 51~100 | 60 | 60 | 30 | -20 | |
| 101~150 | 100 | 0 | 20 | -30 | |
| 151~200 | -30 | 30 | -20 | -20 | |
| 201~250 | -30 | -45 | -30 | 15 | |
| 251~300 | 25 | 40 | -45 | 30 | |
| 301~350 | 35 | -50 | -60 | 60 | |
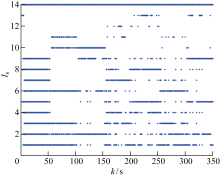
Fig.4
Model selection result of fuzzy inference-based EMA-LMS algorithm (Scenario 1)
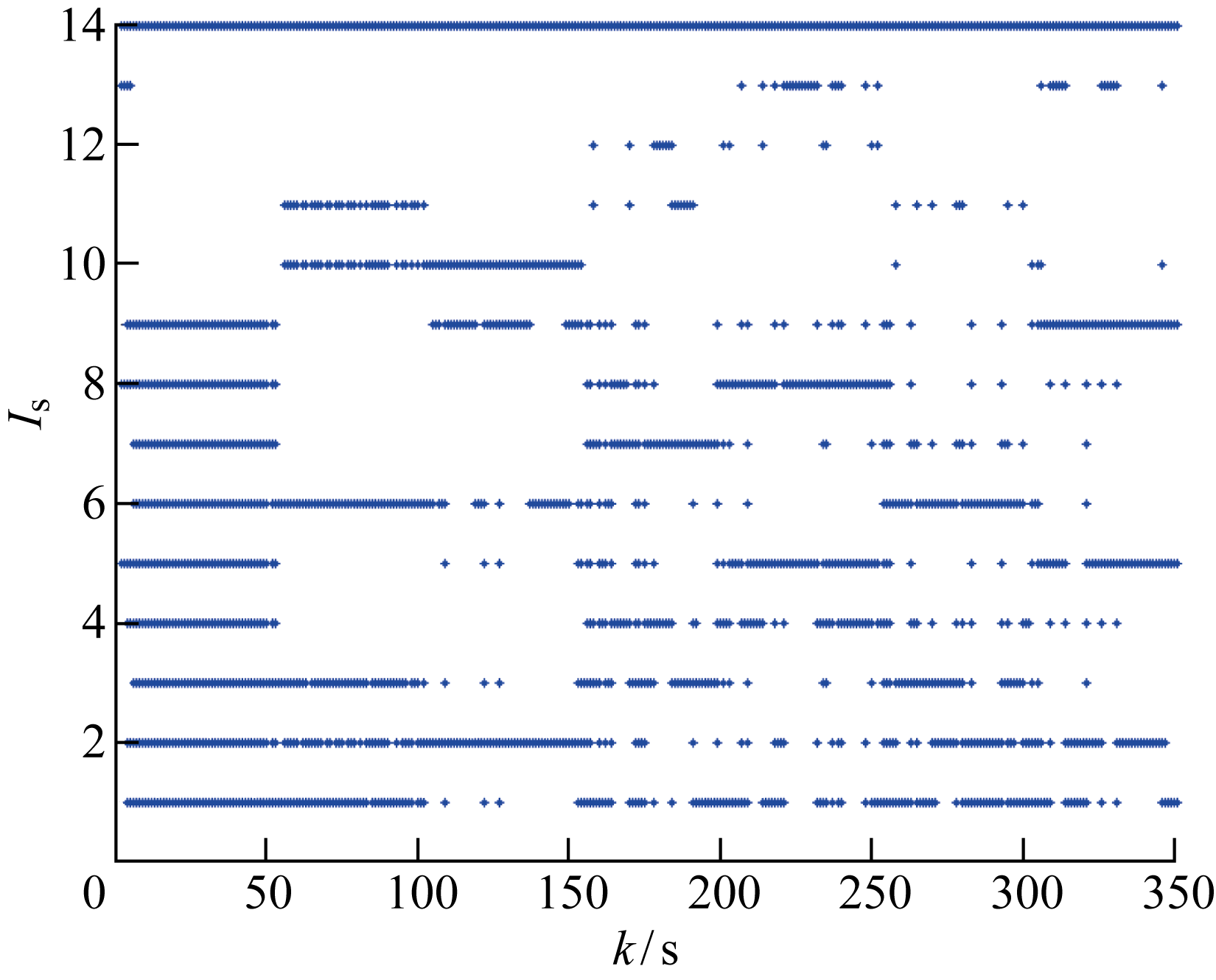
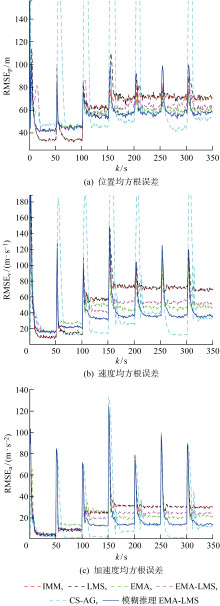
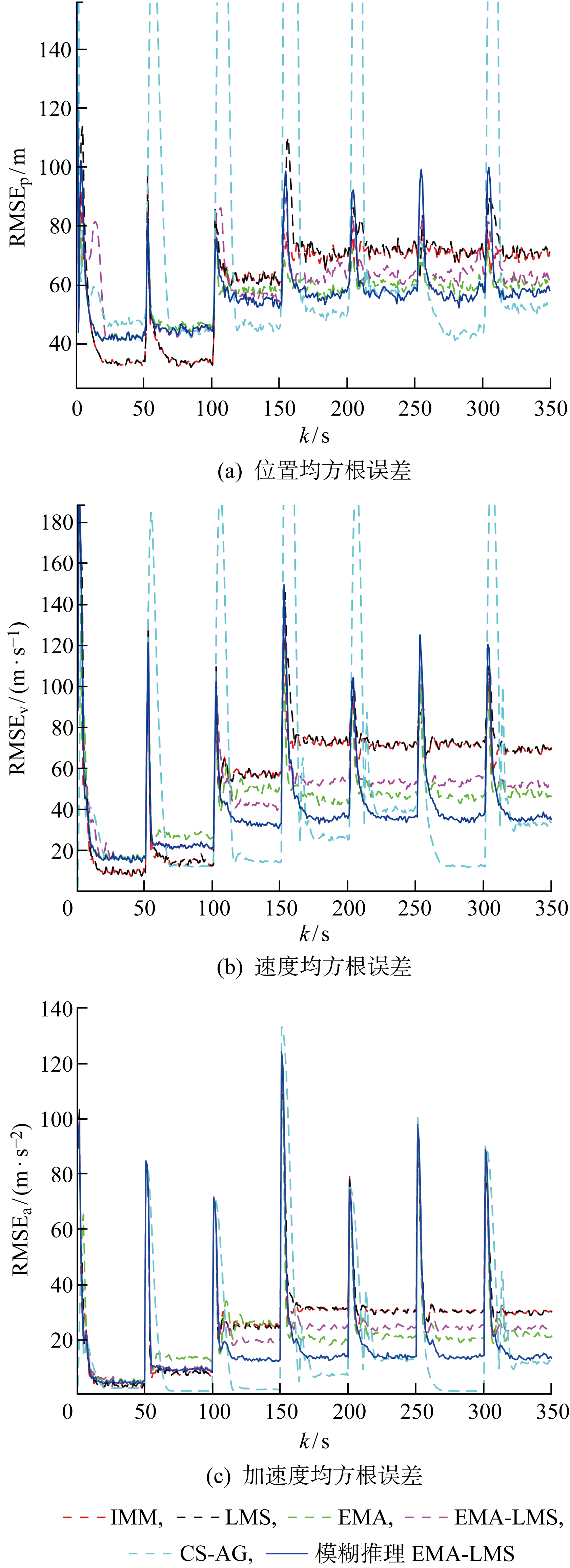
Fig.5
Comparison on tracking indexes of algorithms (Scenario 1)
Tab.3
Average tracking indexes of algorithms (Scenario 1)
| 算法 | 匹配阶段 | 不匹配阶段 | |||||
|---|---|---|---|---|---|---|---|
| ARMSEp/m | ARMSEv/(m·s-1) | ARMSEa/(m·s-2) | ARMSEp/m | ARMSEv/(m·s-1) | ARMSEa/(m·s-2) | ||
| IMM | 40.46 | 22.10 | 11.71 | 69.00 | 69.63 | 32.69 | |
| LMS | 41.55 | 23.44 | 12.01 | 71.20 | 71.53 | 33.11 | |
| EMA | 48.38 | 31.18 | 15.78 | 60.16 | 50.49 | 25.97 | |
| EMA-LMS | 51.36 | 29.75 | 13.24 | 64.09 | 55.39 | 27.78 | |
| CS-AG | 63.54 | 33.77 | 10.13 | 85.08 | 55.91 | 19.68 | |
| 模糊推理 EMA-LMS | 48.24 | 28.59 | 12.73 | 59.58 | 43.20 | 20.05 | |
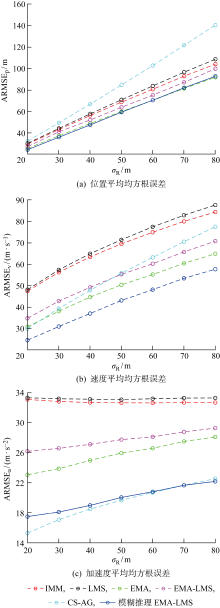
Fig.6
Comparison of tracking indexes of algorithms at different measurement noises (Scenario 1)


Fig.7
Model selection result of fuzzy inference-based EMA-LMS algorithm (Scenario 2)
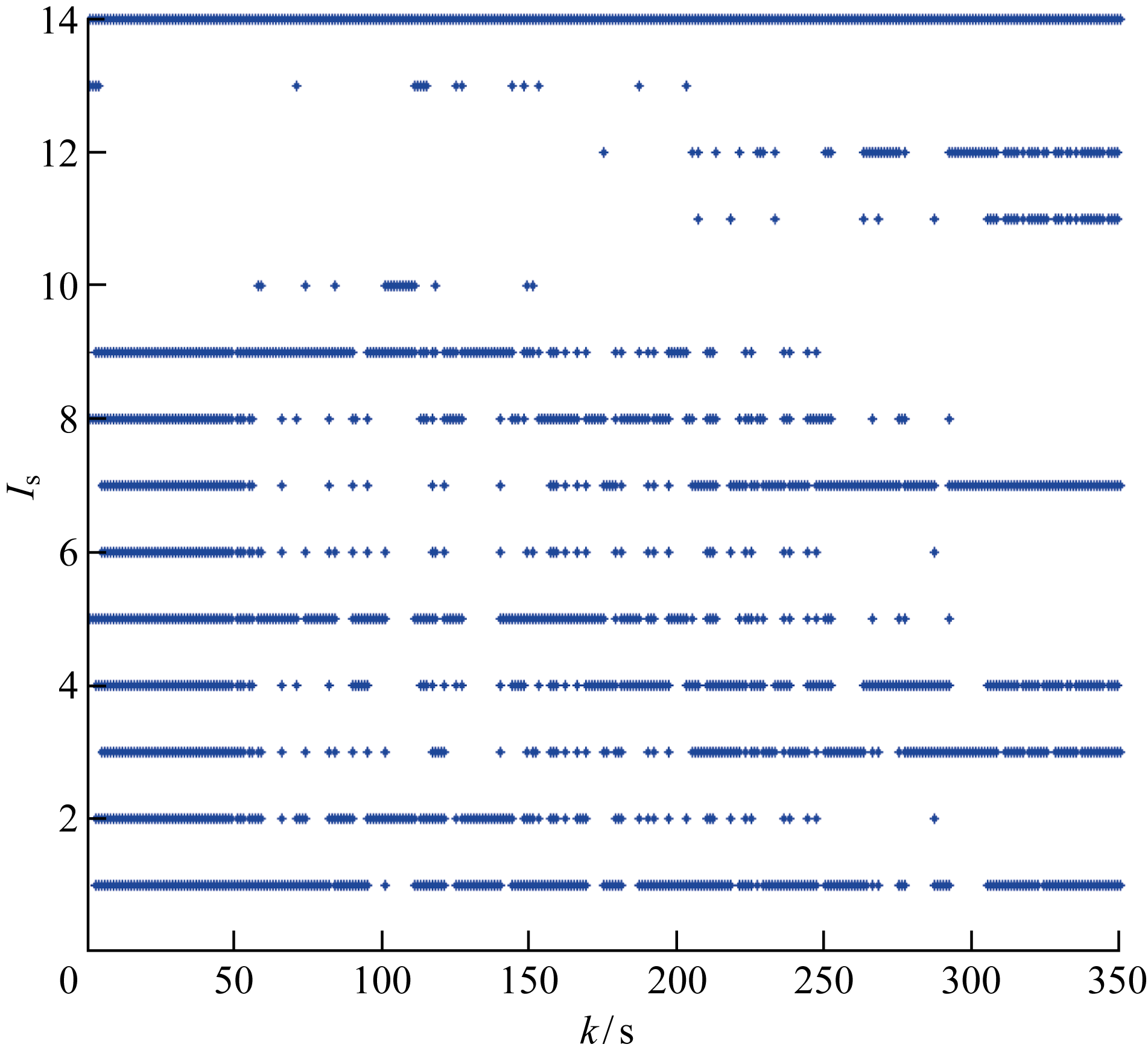
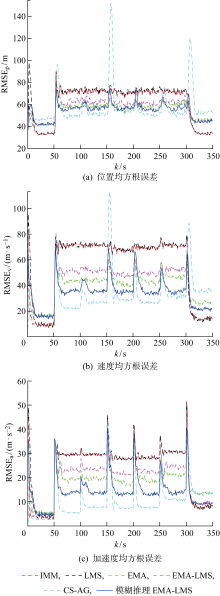
Fig.8
Comparison of tracking indexes of algorithms (Scenario 2)

Tab.4
Average tracking indexes of algorithms (Scenario 2)
| 算法 | 匹配阶段 | 不匹配阶段 | |||||
|---|---|---|---|---|---|---|---|
| ARMSEp/m | ARMSEv/(m·s-1) | ARMSEa(m·s-2) | ARMSEp/m | ARMSEv/(m·s-1) | ARMSEa/(m·s-2) | ||
| IMM | 37.84 | 16.85 | 8.42 | 71.25 | 69.90 | 29.60 | |
| LMS | 40.29 | 20.27 | 9.96 | 72.08 | 70.46 | 29.64 | |
| EMA | 46.09 | 25.37 | 11.55 | 58.91 | 45.08 | 20.55 | |
| EMA-LMS | 45.93 | 24.01 | 10.08 | 61.95 | 51.26 | 23.78 | |
| CS-AG | 55.42 | 30.71 | 9.82 | 56.95 | 32.87 | 10.40 | |
| 模糊推理 EMA-LMS | 46.34 | 24.09 | 9.81 | 57.67 | 38.53 | 15.69 | |

Fig.9
Comparison of tracking indexes of algorithms at different measurement noises (Scenario 2)

| [1] |
陈晓, 李亚安, 李余兴, 等. 基于距离加权的概率数据关联机动目标跟踪算法[J]. 上海交通大学学报, 2018, 52(4): 474-479.
doi: 10.16183/j.cnki.jsjtu.2018.04.013 |
| CHEN Xiao, LI Ya’an, LI Yuxing, et al. Maneuvering target tracking algorithm based on weighted distance of probability data association[J]. Journal of Shanghai Jiao Tong University, 2018, 52(4): 474-479. | |
| [2] |
LI X R, ZHANG Y. Multiple-model estimation with variable structure. V. Likely-model set algorithm[J]. IEEE Transactions on Aerospace and Electronic Systems, 2000, 36(2): 448-466.
doi: 10.1109/7.845222 URL |
| [3] |
LI X R, ZHI X, ZHANG Y. Multiple-model estimation with variable structure. III. Model-group switching algorithm[J]. IEEE Transactions on Aerospace and Electronic Systems, 1999, 35(1): 225-241.
doi: 10.1109/7.745694 URL |
| [4] |
LI X R, JILKOV V P, RU J. Multiple-model estimation with variable structure—Part VI: Expected-mode augmentation[J]. IEEE Transactions on Aerospace and Electronic Systems, 2005, 41(3): 853-867.
doi: 10.1109/TAES.2005.1541435 URL |
| [5] |
JILKOV V P, ANGELOVA D S, SEMERDJIEV T Z A. Design and comparison of mode-set adaptive IMM algorithms for maneuvering target tracking[J]. IEEE Transactions on Aerospace and Electronic Systems, 1999, 35(1): 343-350.
doi: 10.1109/7.745704 URL |
| [6] | 王昱淇, 卢宙, 蔡云泽. 基于一致性的分布式变结构多模型方法[J]. 自动化学报, 2021, 47(7): 1548-1557. |
| WANG Yuqi, LU Zhou, CAI Yunze. Consensus-based distributed variable structure multiple model[J]. Acta Automatica Sinica, 2021, 47(7): 1548-1557. | |
| [7] | 郭志, 董春云, 蔡远利, 等. 时变转移概率IMM-SRCKF机动目标跟踪算法[J]. 系统工程与电子技术, 2015, 37(1): 24-30. |
|
GUO Zhi, DONG Chunyun, CAI Yuanli, et al. Time-varying transition probability based IMM-SRCKF algorithm for maneuvering target tracking[J]. Systems Engineering and Electronics, 2015, 37(1): 24-30.
doi: 10.3969/j.issn.1001-506X.2015.01.05 |
|
| [8] | 游航航, 韩其松, 余敏建, 等. 基于AIGWO-IMMUKF 的目标跟踪算法[J]. 北京航空航天大学学报, 2020, 46(10): 1826-1833. |
| YOU Hanghang, HAN Qisong, YU Minjian, et al. Target tracking algorithm based on AIGWO-IMMUKF[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(10): 1826-1833. | |
| [9] |
XIE G, SUN L, WEN T, et al. Adaptive transition probability matrix-based parallel IMM algorithm[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2019, 51(5): 2980-2989.
doi: 10.1109/TSMC.2019.2922305 URL |
| [10] | 潘媚媚. 高速高机动目标自适应跟踪算法研究[D]. 西安: 西安电子科技大学, 2019. |
| PAN Meimei. Research on adaptive algorithms for highly maneuvering target tracking[D]. Xi’an: Xi-dian University, 2019. | |
| [11] | EUN Y, JEON D. Fuzzy inference-based dynamic determination of IMM mode transition probability for multi-radar tracking[C]// Proceedings of the 16th International Conference on Information Fusion. Istanbul, Turkey: IEEE, 2013: 1520-1525. |
| [12] | LI L Q, ZHAO D, LUO C D. A novel interacting TS fuzzy multiple model by using UKF for maneuvering target tracking[C]// 2019 22th International Conference on Information Fusion. Ottawa, Canada: IEEE, 2019: 1-7. |
| [13] | 邵堃, 雷迎科. 基于模糊逻辑和机动检测的AGIMM跟踪算法[J]. 空军工程大学学报(自然科学版), 2020, 21(4): 80-87. |
| SHAO Kun, LEI Yingke. AGIMM tracking algorithm based on fuzzy logic and maneuvering detection[J]. Journal of Air Force Engineering University (Natural Science Edition), 2020, 21(4): 80-87. | |
| [14] |
CHANG C W, TAO C W. A novel approach to implement Takagi-Sugeno fuzzy models[J]. IEEE Transactions on Cybernetics, 2017, 47(9): 2353-2361.
doi: 10.1109/TCYB.2017.2701900 URL |
| [15] | 雷英杰, 路艳丽, 王毅, 等. 模糊逻辑与智能系统[M]. 西安: 西安电子科技大学出版社, 2016. |
| LEI Yingjie, LU Yanli, WANG Yi, et al. Fuzzy logic with intelligent systems[M]. Xi’an: Xidian University Press, 2016. | |
| [16] | 罗晓勇. 无线传感网络中基于交互式多模型目标跟踪算法研究[D]. 重庆: 重庆邮电大学, 2020. |
| LUO Xiaoyong. Research on target tracking algorithm based on interaction multiple model in wireless sensor networks[D]. Chongqing: Chongqing University of Posts and Telecommunications, 2020. | |
| [17] | 傅虹景, 于守江, 吉峰, 等. 基于“当前”统计模型的变结构交互多模型算法[J]. 无线电工程, 2020, 50(4): 318-322. |
| FU Hongjing, YU Shoujiang, JI Feng, et al. Variable structure interactive multiple model algorithm based on current statistical model[J]. Radio Engineering, 2020, 50(4): 318-322. |
| [1] | ZHANG Jianjun,LIU Weidong,LI Le,CHENG Ruifeng,ZHENG Haifeng. Adaptive Impedance Control for Underwater Manipulator Intelligent Grasping in Unknown Environment [J]. Journal of Shanghai Jiaotong University, 2019, 53(3): 341-347. |
| [2] | CHEN Xiao,LI Ya’an,LI Yuxing,YU Jing. Maneuvering Target Tracking Algorithm Based on Weighted Distance of Probability Data Association [J]. Journal of Shanghai Jiao Tong University, 2018, 52(4): 474-479. |
| [3] | SHA Jian-Jun, PAN erShun. Soldering Parameter-Setting Approach Based on Improved Adaptive Neuro Fuzzy Inference Model [J]. Journal of Shanghai Jiaotong University, 2011, 45(12): 1741-1746. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||