Journal of Shanghai Jiao Tong University ›› 2025, Vol. 59 ›› Issue (10): 1558-1567.doi: 10.16183/j.cnki.jsjtu.2024.032
• Electronic Information and Electrical Engineering • Previous Articles Next Articles
DONG Dejin1,2, WANG Changcheng3, CAI Yunze1,2( )
)
Received:2024-01-22
Revised:2024-03-01
Accepted:2024-03-07
Online:2025-10-28
Published:2025-10-24
CLC Number:
DONG Dejin, WANG Changcheng, CAI Yunze. An Improved Multi-Objective Evolutionary Algorithm for Grid Map Path Planning[J]. Journal of Shanghai Jiao Tong University, 2025, 59(10): 1558-1567.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2024.032
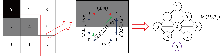
Fig.1
Construction process of weighted graph model for multi-objective path planning
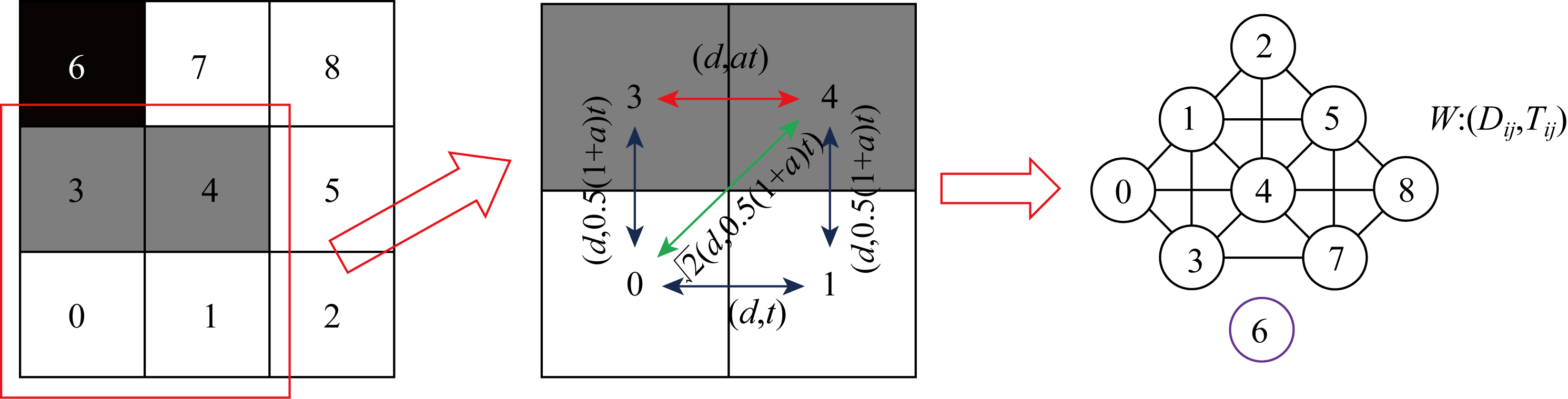
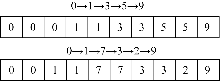
Fig.2
Encoding of unified length
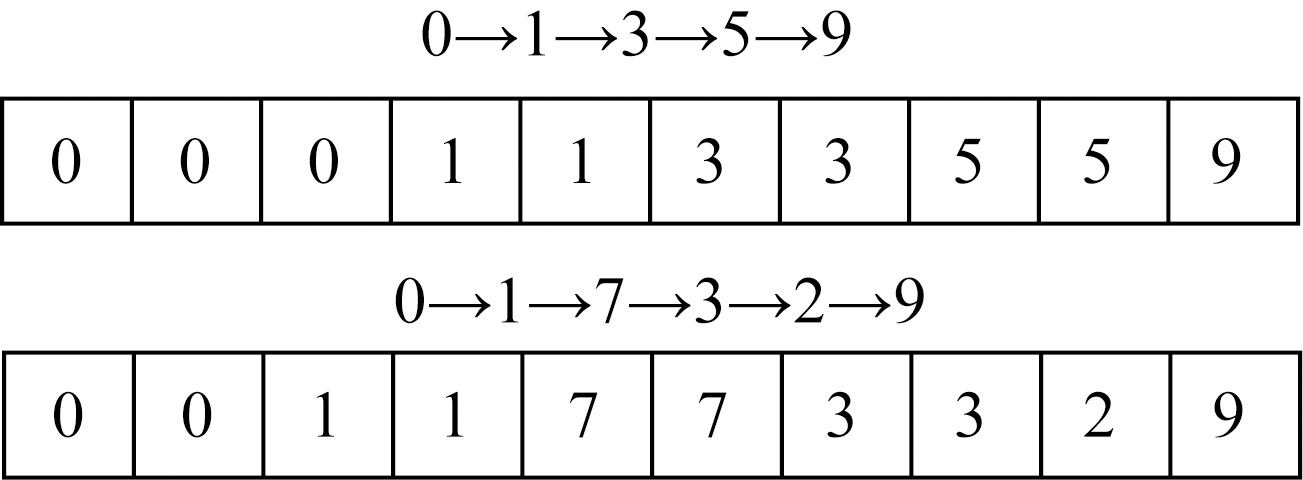

Fig.3
Flow chart of AD-MOEA


Fig.4
New individual generation strategy
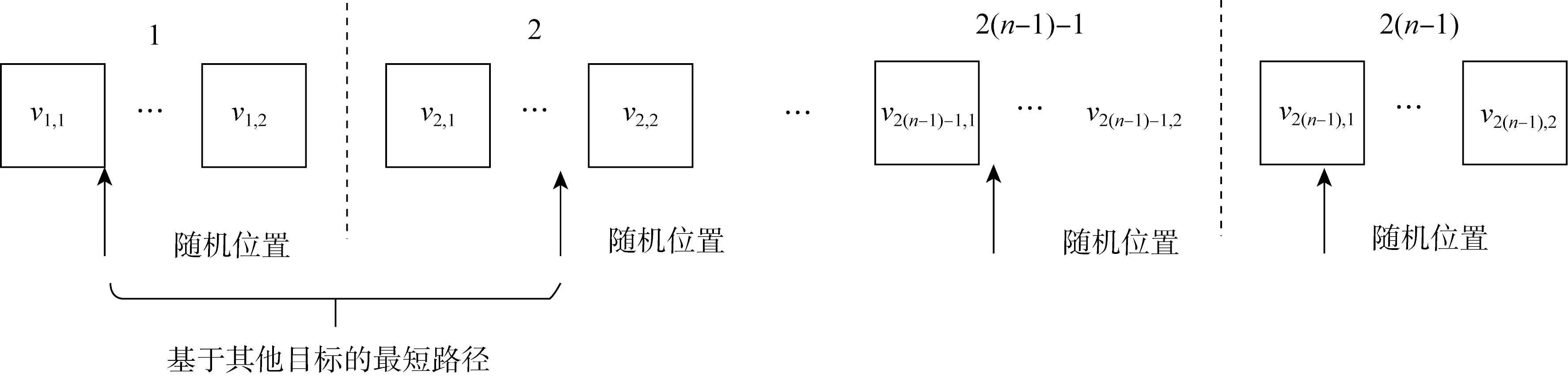

Fig.5
Individual distribution in bi-objective space
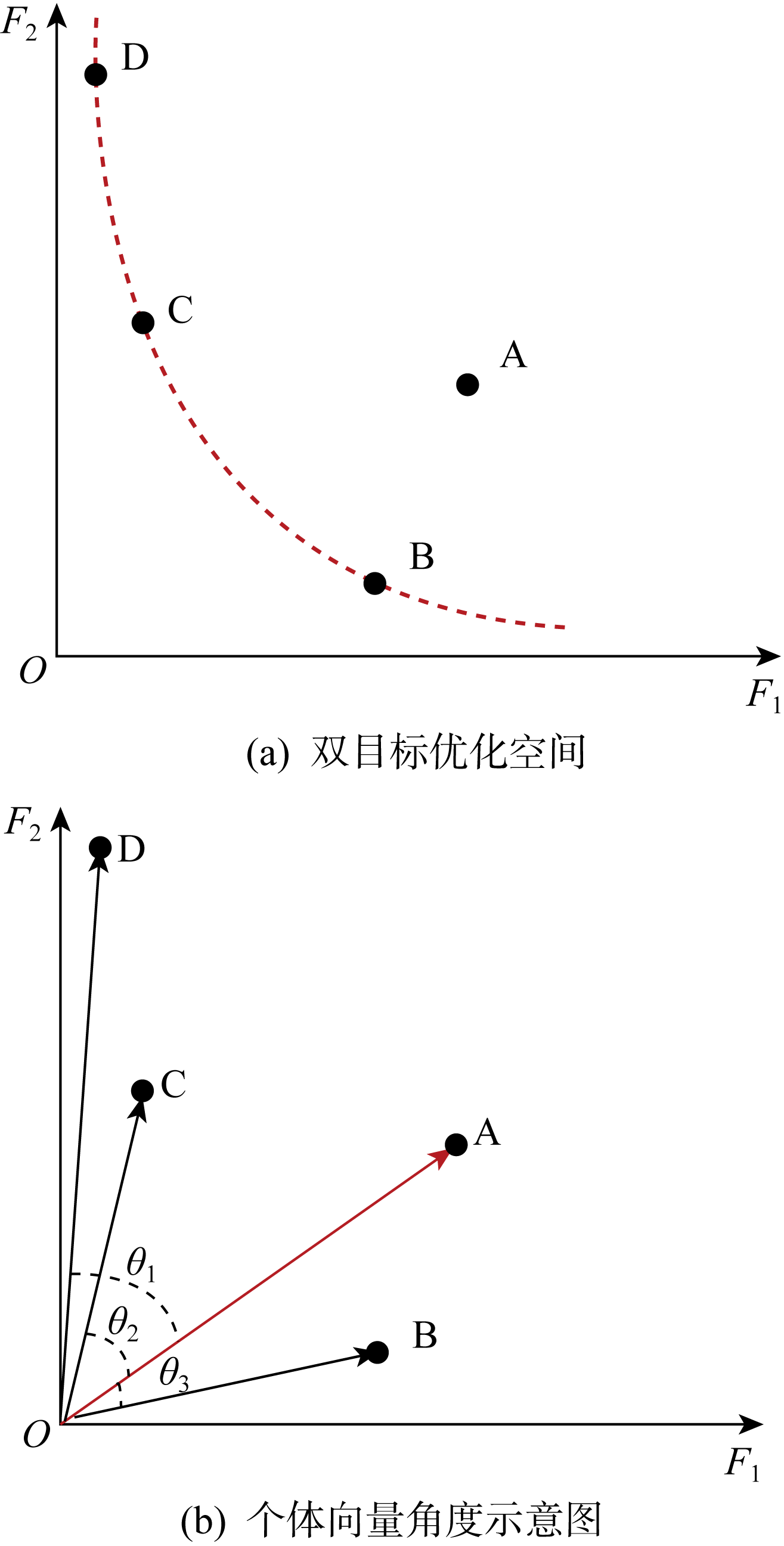
Fig.6
Mutation strategy
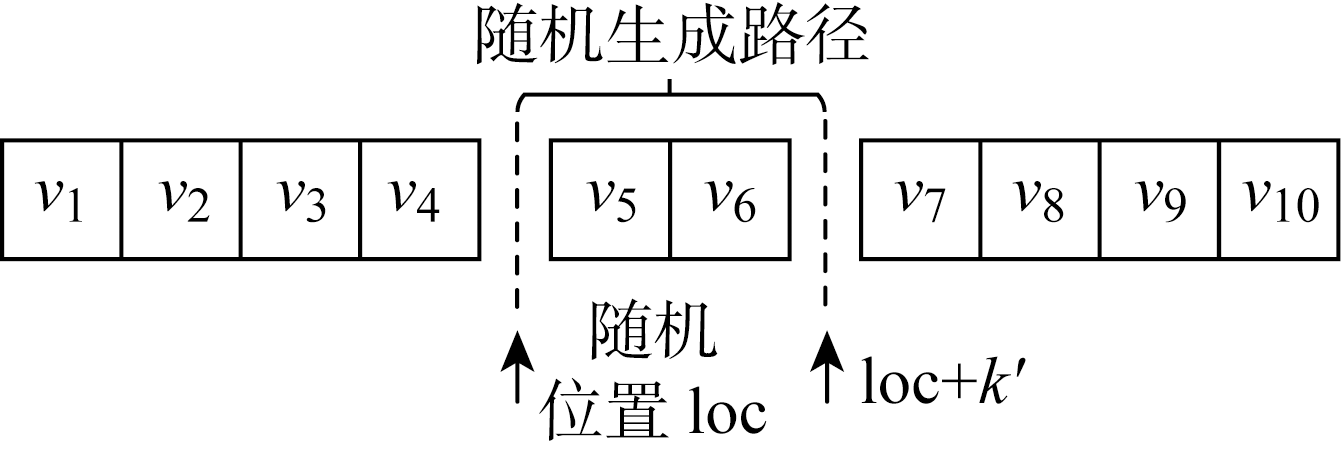
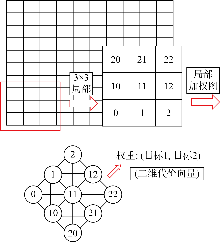
Fig.7
Modeling process of random weighted graph

Tab.1
Parameters of random weighted map
| 场景 | 节点个数 | 目标个数 | 设置种群数量 | 设置迭代轮次 |
|---|---|---|---|---|
| P1 | 400 (20×20) | 2 | 20 | 20 |
| P2 | 400 (20×20) | 5 | 70 | 70 |
| P3 | 1600 (40×40) | 2 | 20 | 20 |
| P4 | 1600 (40×40) | 3 | 40 | 40 |
Tab.2
Average number of solutions by different algorithms
| 场景 | 平均求解数目 | ||||||
|---|---|---|---|---|---|---|---|
| AD-MOEA | NAMOA* | NSGA-III | NSGA-II | MOEA/D | AR-MOEA | LMOCSO | |
| P1 | 8.2 | 10 | 1.9 | 1.5 | 1.2 | 11.8 | 1.1 |
| P2 | 30.4 | 65 | 5.7 | 3.8 | timeout | 8.9 | 1.7 |
| P3 | 10.0 | 15 | 1.7 | 1.7 | 1.3 | 13.7 | 1.2 |
| P4 | 18.9 | 28 | 1.9 | 3.2 | 1.9 | 19.3 | 1.1 |
Tab.3
Average solving time of different algorithms
| 场景 | 平均求解时间/s | ||||||
|---|---|---|---|---|---|---|---|
| AD-MOEA | NAMOA* | NSGA-III | NSGA-II | MOEA/D | AR-MOEA | LMOCSO | |
| P1 | 0.32 | 0.29 | 2.20 | 0.46 | 0.39 | 2.19 | 0.17 |
| P2 | 8.77 | 14.93 | 25.38 | 5.56 | timeout | 25.54 | 0.57 |
| P3 | 0.70 | 3.80 | 17.58 | 4.80 | 5.40 | 18.25 | 3.27 |
| P4 | 3.26 | 13.33 | 61.85 | 12.47 | 74.94 | 59.97 | 6.42 |
Tab.4
Average memory usage of different algorithms
| 算法 | 平均内存占有率 | |||
|---|---|---|---|---|
| P1 | P2 | P3 | P4 | |
| AD-MOEA | 0.518 | 0.496 | 0.482 | 0.492 |
| NAMOA* | 0.519 | 0.495 | 0.501 | 0.494 |
| NSGA-III | 0.518 | 0.495 | 0.483 | 0.489 |
| NSGA-II | 0.517 | 0.500 | 0.489 | 0.485 |
| MOEA/D | 0.518 | timeout | 0.487 | 0.483 |
| AR-MOEA | 0.516 | 0.502 | 0.484 | 0.487 |
| LMOCSO | 0.519 | 0.505 | 0.483 | 0.492 |
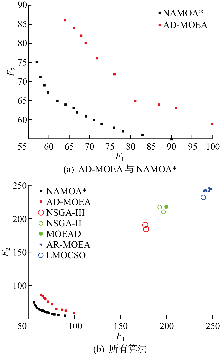
Fig.8
Pareto front distribution of different algorithms
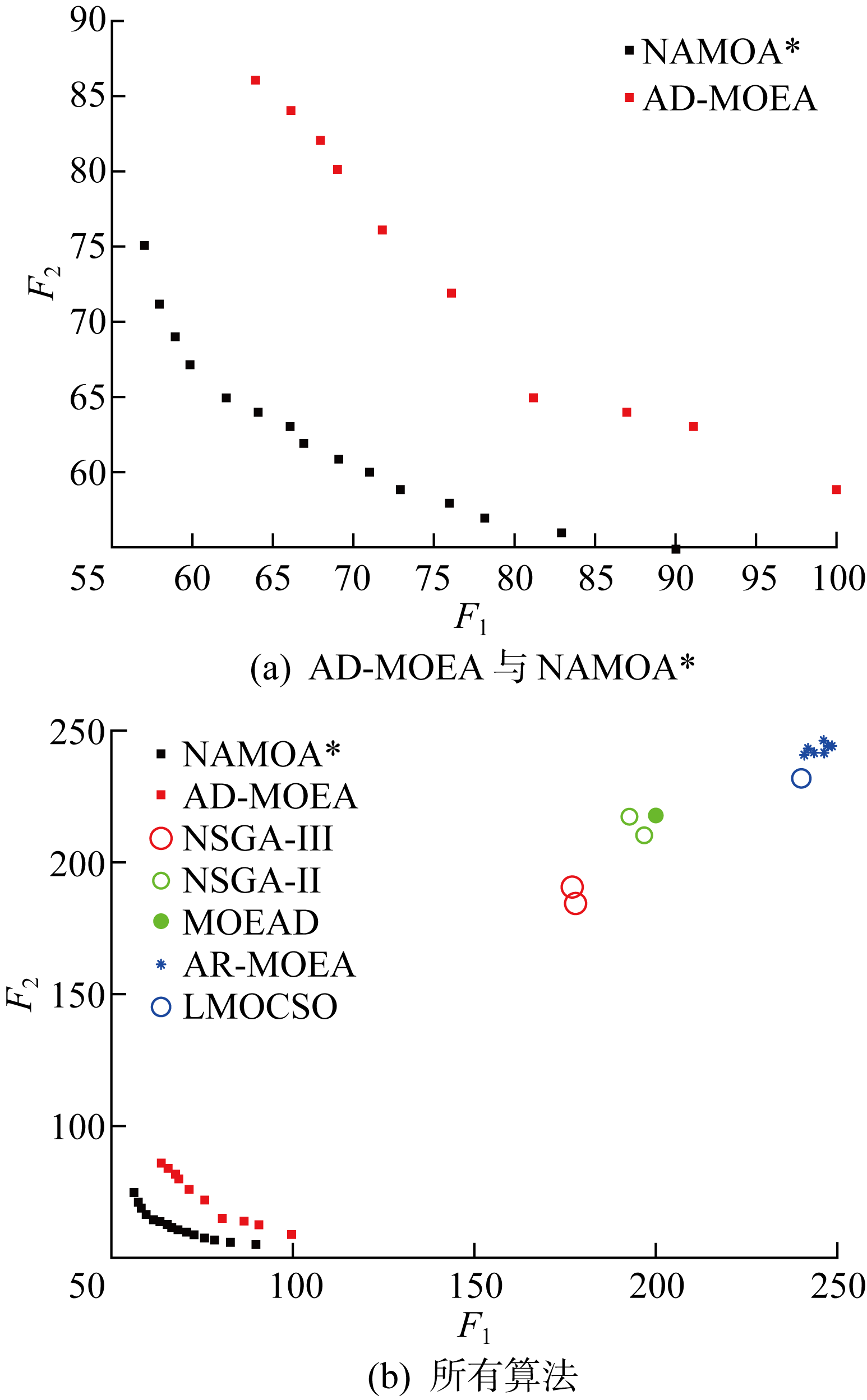
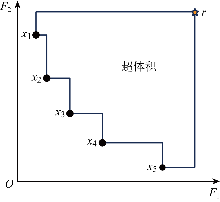
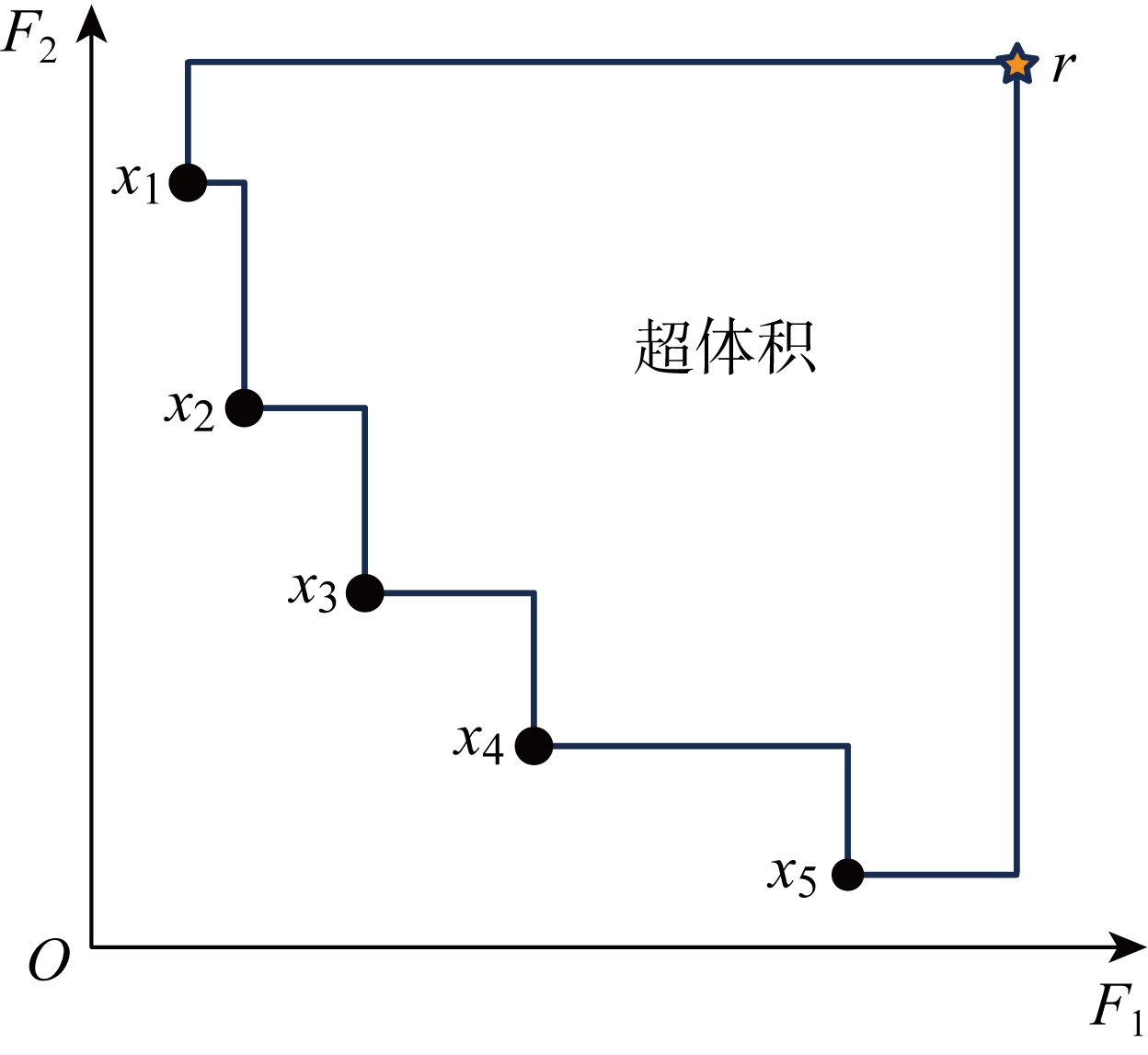
Fig.9
Diagram of hypervolume
Tab.5
Comparison of evaluation indicators of different algorithms
| 算法 | HV | IGD | 算法 | HV | IGD |
|---|---|---|---|---|---|
| AD-MOEA | 35111 | 12.06 | MOEA/D | 1650 | 202.70 |
| NSGA-III | 4740 | 164.18 | AR-MOEA | 61 | 248.70 |
| NSGA-II | 2252 | 195.44 | LMOCSO | 180 | 240.88 |

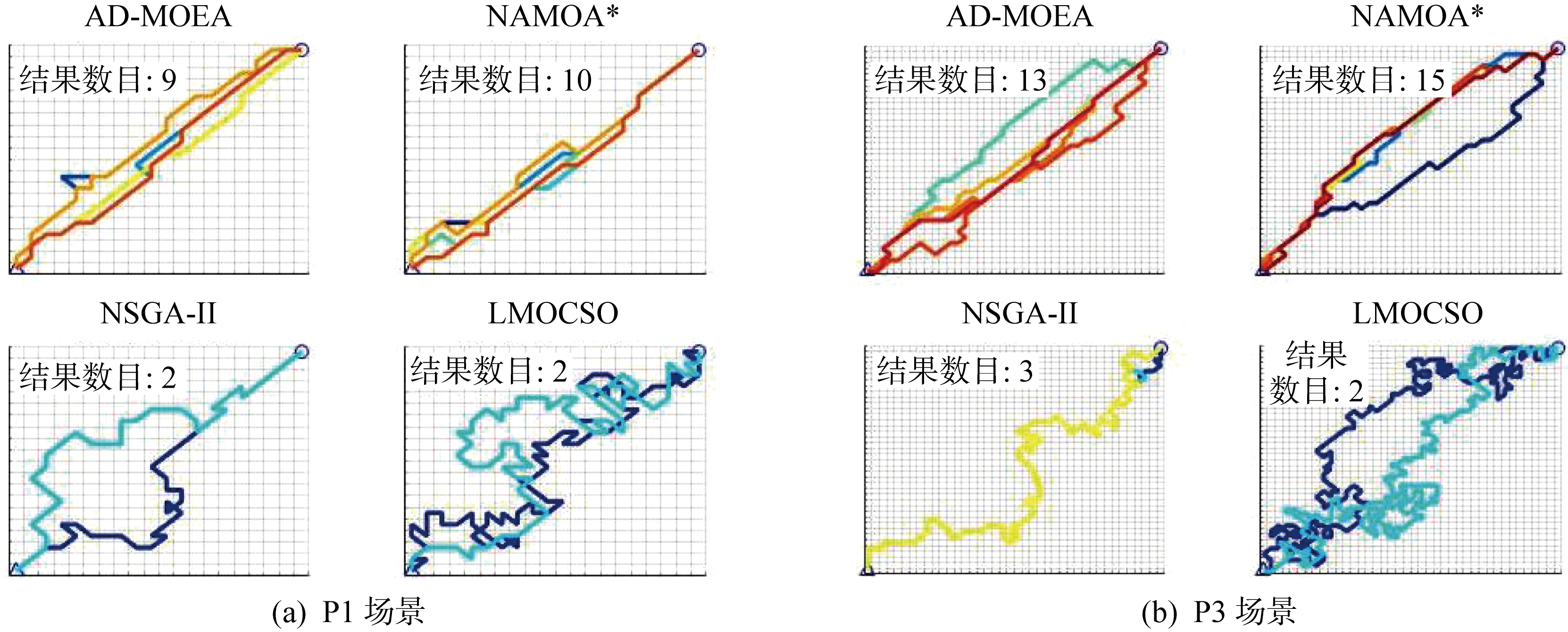
Fig.10
Multi-objective paths of four algorithms in Scenes P1 and P3
Tab.6
Parameters of Benchmark map
| 场景 | L | 目标个数 |
|---|---|---|
| Benchmark1 | 37 | 2 |
| Benchmark2 | 66 | 2 |
| Benchmark3 | 128 | 2 |
Tab.7
Solution results of Benchmark map
| 场景 | AD-MOEA 平均解个数 | AD-MOEA 平均时间/s | 精确解个数 |
|---|---|---|---|
| Benchmark1 | 8.0 | 0.49 | 7.0 |
| Benchmark2 | 4.1 | 1.08 | 4.0 |
| Benchmark3 | 2.7 | 1.77 | 5.0 |
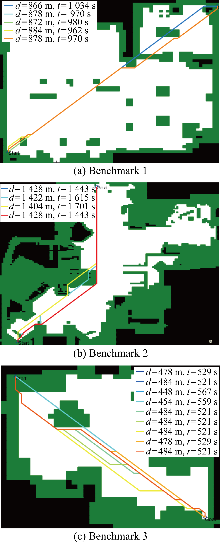
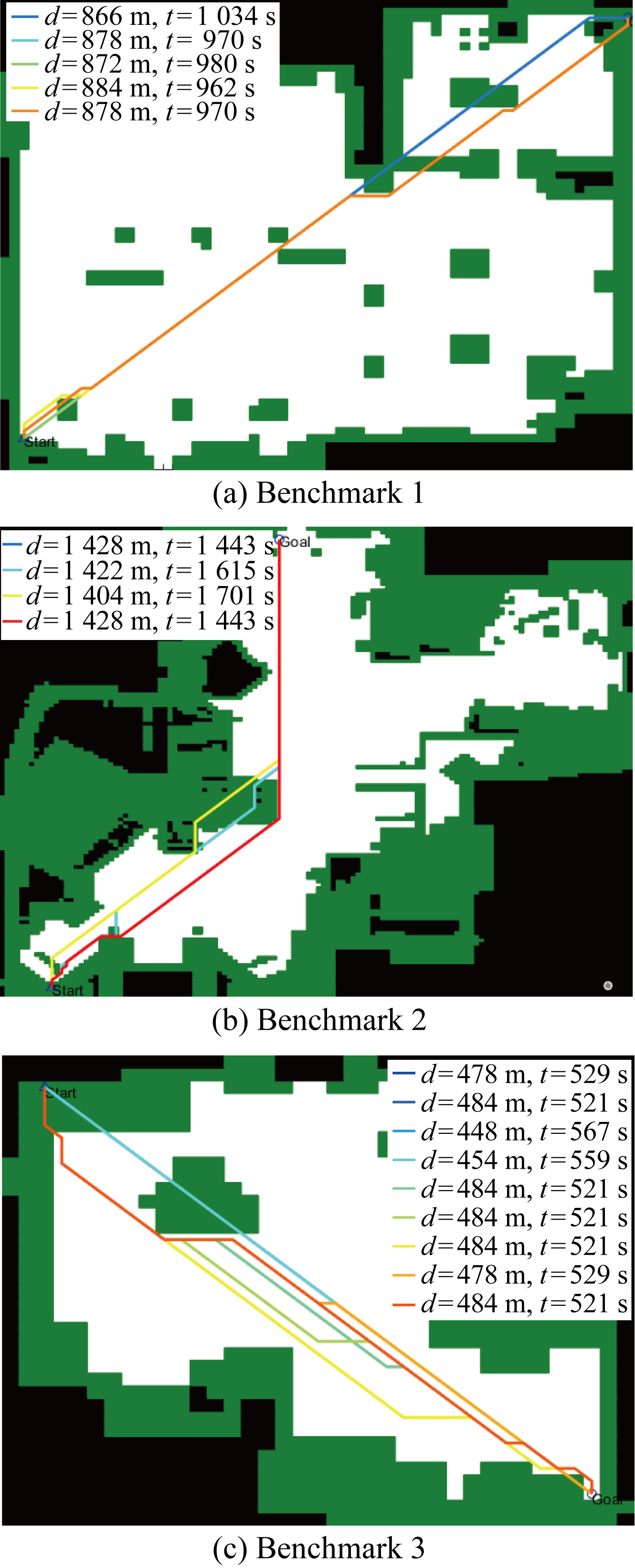
Fig.11
MOPP results of AD-MOEA for three benchmark maps
| [1] |
裘柯钧, 鲍中凯, 陈璐. 民用客机总装车间自动引导车任务分配及路径规划[J]. 上海交通大学学报, 2023, 57(1): 93-102.
doi: 10.16183/j.cnki.jsjtu.2021.223 |
| QIU Kejun, BAO Zhongkai, CHEN Lu. Task assignment and path planning for automatic guided vehicles in aircraft assembly workshop[J]. Journal of Shanghai Jiao Tong University, 2023, 57(1): 93-102. | |
| [2] | ABED B M, JASIM W M. Multi objective optimization algorithms for mobile robot path planning: A survey[J]. International Journal of Online & Biomedical Engineering, 2022, 18(15): 160-177. |
| [3] | OU Y Q, FAN Y X, ZHANG X L, et al. Improved A* path planning method based on the grid map[J]. Sensors, 2022, 22(16): 6198. |
| [4] | ZHANG D, LUO R, YIN Y B, et al. Multi-objective path planning for mobile robot in nuclear accident environment based on improved ant colony optimization with modified A*[J]. Nuclear Engineering and Technology, 2023, 55(5): 1838-1854. |
| [5] | DUAN P, SANG H Y, LI J Q, et al. Solving multi-objective path planning for service robot by a pareto-based optimization algorithm[C]// 2018 Chinese Control and Decision Conference. Shenyang, China: IEEE, 2018: 3416-3420 |
| [6] | HOHMANN N, BUJNY M, ADAMY J, et al. Hybrid evolutionary approach to multi-objective path planning for UAVs[C]// 2021 IEEE Symposium Series on Computational Intelligence. Orlando, USA: IEEE, 2021: 9660187. |
| [7] | STEWART B S, WHITE C C. Multiobjective A*[J]. Journal of the ACM, 1991, 38(4): 775-814. |
| [8] | MANDOW L, DE LA CRUZ J L P. Multiobjective A* search with consistent heuristics[J]. Journal of the ACM, 2008, 57(5): 1-25. |
| [9] | Ulloa C H, Yeoh W, Baier J, et al. A simple and fast bi-objective search algorithm[C]// Proceedings of the International Conference on Automated Planning and Scheduling. Nancy, France: AAAI, 2020, 30: 143-151. |
| [10] | REN Z Q, ZHAN R, RATHINAM S, et al. Enhanced multi-objective A* using balanced binary search trees[C]// Proceedings of the International Symposium on Combinatorial Search. Vienna, Austria: AAAI, 2022: 162-170. |
| [11] | HU X B, GU S H, ZHANG C, et al. Finding all Pareto optimal paths by simulating ripple relay race in multi-objective networks[J]. Swarm and Evolutionary Computation, 2021, 64: 100908. |
| [12] | JIN B. Multi-objective A* algorithm for the multimodal multi-objective path planning optimization[C]// 2021 IEEE Congress on Evolutionary Computation. Kraków, Poland: IEEE, 2021: 1704-1711. |
| [13] | AHN C W, RAMAKRISHNA R S. A genetic algorithm for shortest path routing problem and the sizing of populations[J]. IEEE Transactions on Evolutionary Computation, 2002, 6(6): 566-579. |
| [14] | DEB K, PRATAP A, AGARWAL S, et al. A fast and elitist multiobjective genetic algorithm: NSGA-II[J]. IEEE Transactions on Evolutionary Computation, 2002, 6(2): 182-197. |
| [15] | LI K, FIALHO A, KWONG S, et al. Adaptive operator selection with bandits for a multiobjective evolutionary algorithm based on decomposition[J]. IEEE Transactions on Evolutionary Computation, 2014, 18(1): 114-130. |
| [16] | REN Q, YAO Y, YANG G, et al. Multi-objective path planning for UAV in the urban environment based on CDNSGA-II[C]// 2019 IEEE International Conference on Service-Oriented System Engineering. San Francisco, USA: IEEE, 2019: 350-3505. |
| [17] | YAO X Y, LI W H, PAN X G, et al. Multimodal multi-objective evolutionary algorithm for multiple path planning[J]. Computers & Industrial Engineering, 2022, 169: 108145. |
| [18] | ZHENG S H, ZHENG C R, LI W. Research on multi-objective shortest path based on genetic algorithm[C]// 2022 2nd International Conference on Computer Science and Blockchain. Wuhan, China: IEEE, 2022: 127-130. |
| [19] |
TIAN Y, ZHENG X T, ZHANG X Y, et al. Efficient large-scale multiobjective optimization based on a competitive swarm optimizer[J]. IEEE Transactions on Cybernetics, 2020, 50(8): 3696-3708.
doi: 10.1109/TCYB.2019.2906383 pmid: 30951490 |
| [20] | CHENG R, JIN Y C, OLHOFER M, et al. A reference vector guided evolutionary algorithm for many-objective optimization[J]. IEEE Transactions on Evolutionary Computation, 2016, 20(5): 773-791. |
| [21] | DEB K, JAIN H. An evolutionary many-objective optimization algorithm using reference-point-based nondominated sorting approach, part I: Solving problems with box constraints[J]. IEEE Transactions on Evolutionary Computation, 2014, 18(4): 577-601. |
| [22] | TIAN Y, CHENG R, ZHANG X Y, et al. An indicator-based multiobjective evolutionary algorithm with reference point adaptation for better versatility[J]. IEEE Transactions on Evolutionary Computation, 2018, 22(4): 609-622. |
| [23] | LIU Z Z, WANG Y, HUANG P Q. AnD: A many-objective evolutionary algorithm with angle-based selection and shift-based density estimation[J]. Information Sciences, 2020, 509: 400-419. |
| [1] | DU Haikuo1,2 (杜海阔), GUO Zhengyu3,4(郭正玉), ZHANG Lulu1,2(章露露), CAI Yunze1,2∗ (蔡云泽). Multi-Objective Loosely Synchronized Search for Multi-Objective Multi-Agent Path Finding with Asynchronous Actions [J]. J Shanghai Jiaotong Univ Sci, 2024, 29(4): 667-677. |
| [2] | LI Erchao∗ (李二超), QI Kuankuan (齐款款). Ant Colony Algorithm Path Planning Based on Grid Feature Point Extraction [J]. J Shanghai Jiaotong Univ Sci, 2023, 28(1): 86-99. |
| [3] | YUAN Weia,b,YANG Minga,b,DENG Liuyuana,b,WANG Chunxiangc,WANG Binga,b. A Fast Method to Build Elevation Terrain Grid Map Using V-Disparity [J]. Journal of Shanghai Jiao Tong University, 2018, 52(1): 1-6. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||