Journal of Shanghai Jiao Tong University ›› 2023, Vol. 57 ›› Issue (10): 1282-1291.doi: 10.16183/j.cnki.jsjtu.2022.191
Special Issue: 《上海交通大学学报》2023年“交通运输工程”专题
• Transportation Engineering • Previous Articles Next Articles
HUANG Hea,b, GAO Yongboa, RU Fenga,b, YANG Lanc( ), WANG Huifengb
), WANG Huifengb
Received:2022-06-01
Revised:2022-09-01
Accepted:2022-10-17
Online:2023-10-28
Published:2023-10-31
Contact:
YANG Lan
E-mail:lanyang@chd.edu.cn.
CLC Number:
HUANG He, GAO Yongbo, RU Feng, YANG Lan, WANG Huifeng. 3D Path Planning of UAV Based on Adaptive Slime Mould Algorithm Optimization[J]. Journal of Shanghai Jiao Tong University, 2023, 57(10): 1282-1291.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2022.191
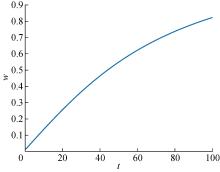
Fig.1
Variation plot of w coefficient
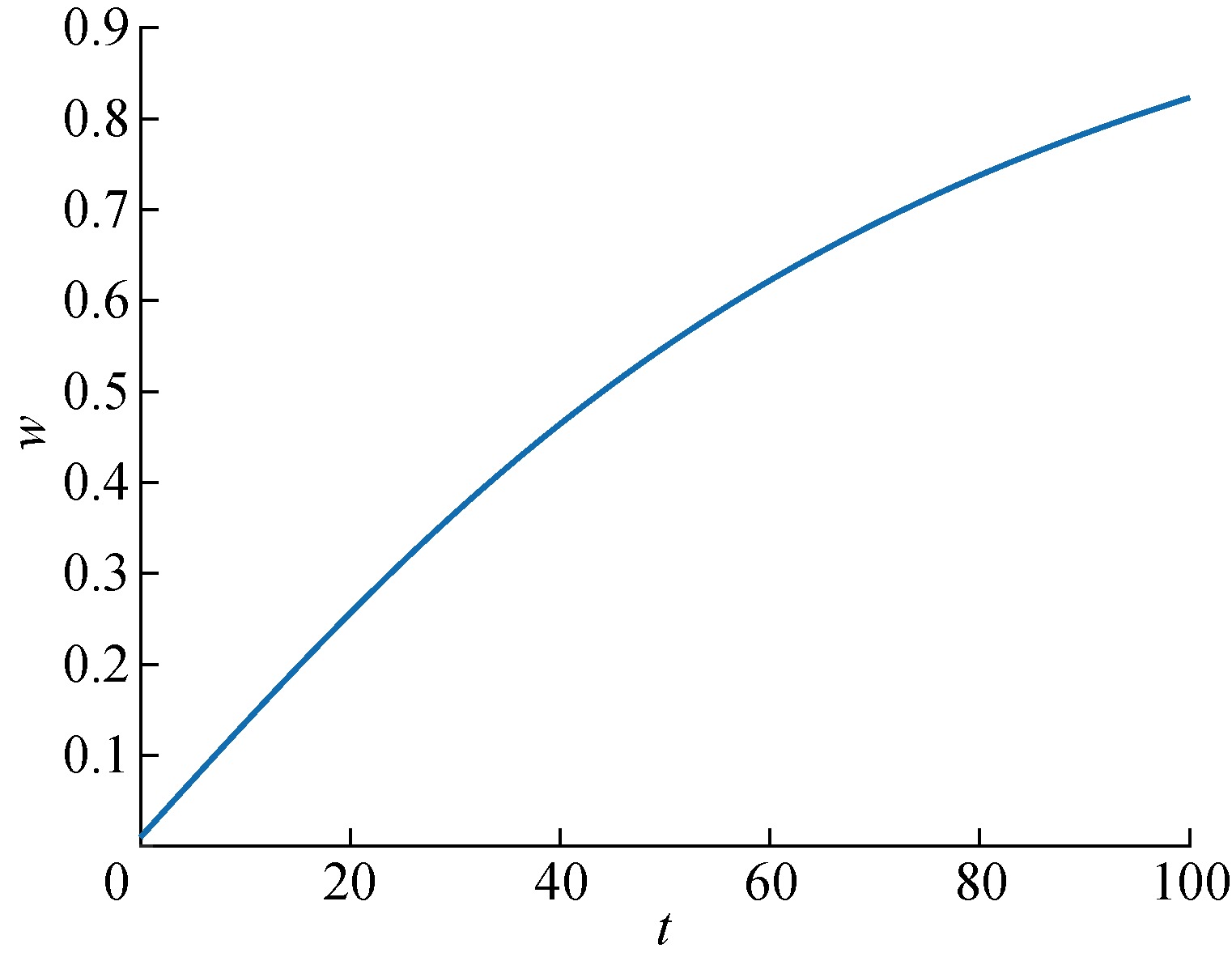

Fig.2
Convergence process of GSMA
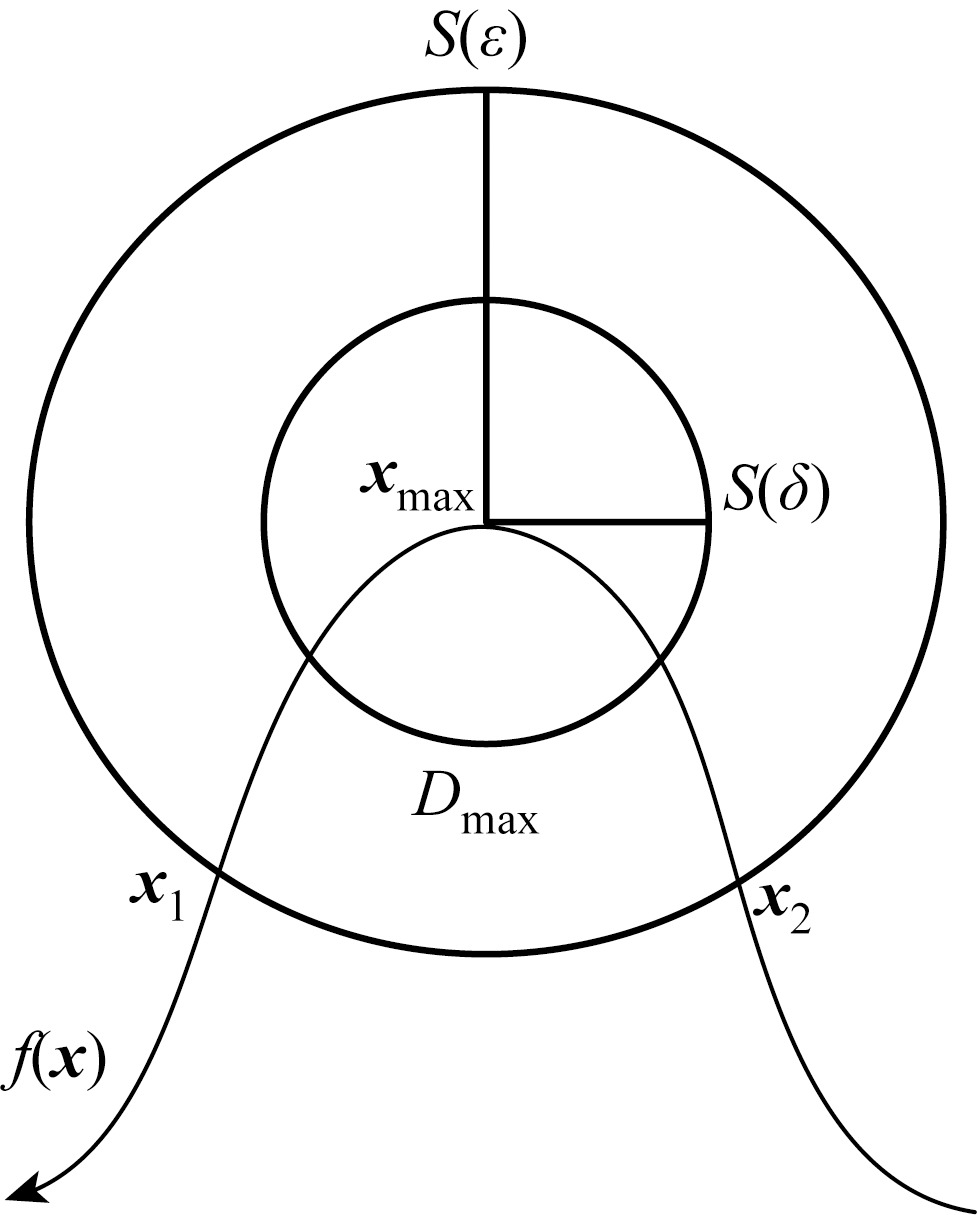
Fig.3
Flow chart of algorithm

Fig.4
Adaptability change curve of each test function
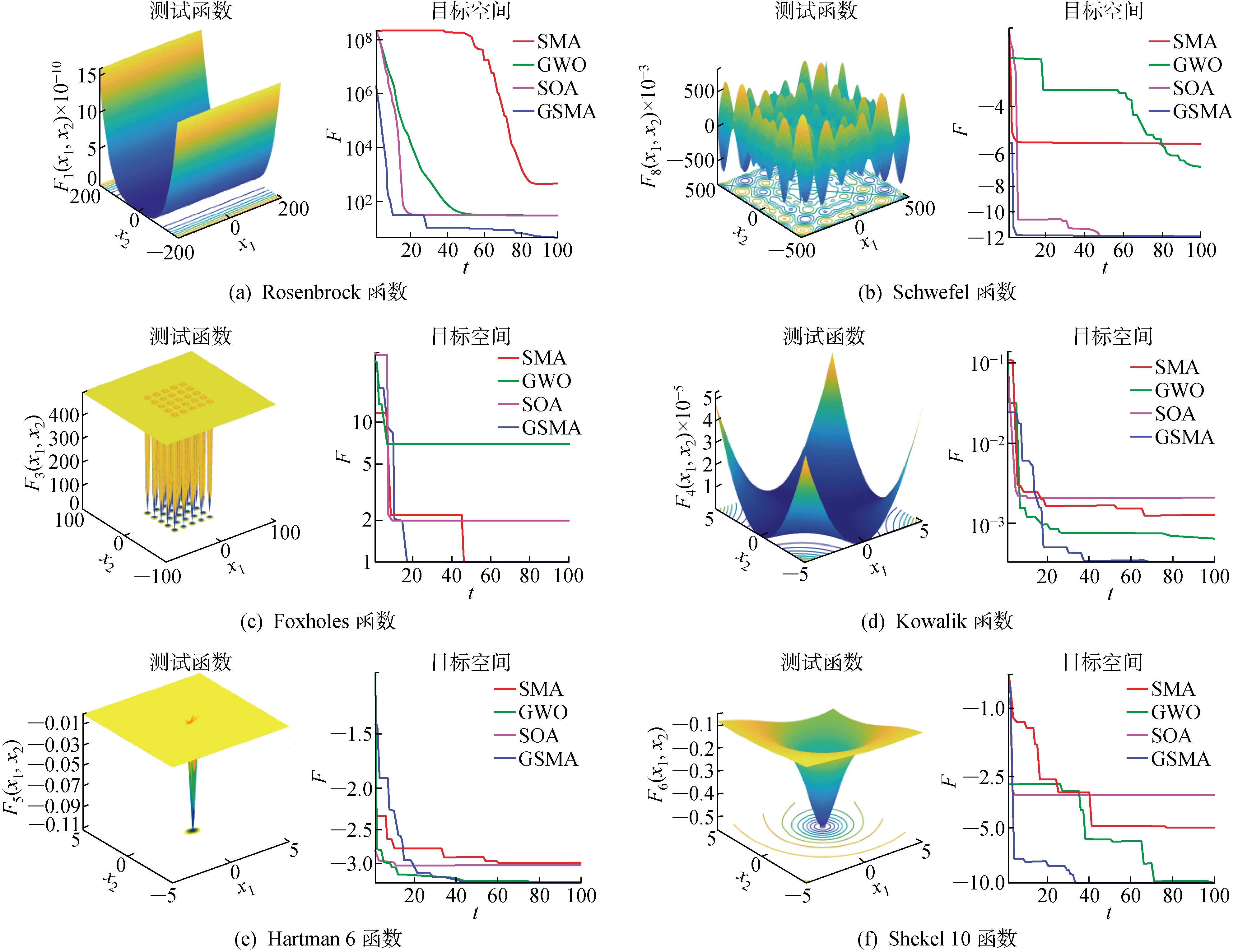
Tab.1
Experimental comparison of test functions of four algorithms
| 测试函数 | 算法 | Fbest | Favg |
|---|---|---|---|
| Rosenbrock | SMA | 28.63 | 28.98 |
| GWO | 28.17 | 28.34 | |
| SOA | 29.67 | 29.93 | |
| GSMA | 27.89 | 28.15 | |
| Schwefel | SMA | -1.22×104 | -1.31×104 |
| GWO | -5.66×103 | -5.61×103 | |
| SOA | -5.66×103 | -5.66×103 | |
| GSMA | -1.26×104 | -1.32×104 | |
| Foxholes | SMA | 0.068 | 0.153 8 |
| GWO | 2.699 | 2.981 | |
| SOA | 0.928 | 0.563 | |
| GSMA | 0.076 | 0.095 | |
| Kowalik | SMA | 1.28×10-3 | 1.71×10-3 |
| GWO | 2.04×10-3 | 2.43×10-3 | |
| SOA | 2.04×10-3 | 2.12×10-3 | |
| GSMA | 6.34×10-4 | 6.97×10-4 | |
| Hartman 6 | SMA | -3.11 | -3.19 |
| GWO | -3.17 | -3.75 | |
| SOA | -2.65 | -2.82 | |
| GSMA | -3.16 | -3.27 | |
| Shekel 10 | SMA | -3.75 | -3.63 |
| GWO | -10.50 | -10.46 | |
| SOA | -4.87 | -4.87 | |
| GSMA | -10.56 | -10.53 |
Tab.2
Main modeling parameters
| 参数 | 数值 |
|---|---|
| v/(km·h-1) | 30~40 |
| KZ | 100 |
| K'Z | 100 |
| KF | 100 |
| kd | 0.6 |
| kg/(km·s-2) | 5 |
| Qh | 10 |
| Qv | 10 |
| amax | 60 |
| βmax | 60 |
| Kthr | Rmax,p/3 |
| ω1 | 0.23 |
| ω2 | 0.45 |
| ω3 | 0.2 |
| ω4 | 0.12 |
| d | 15 |

Fig.5
Simulation result of Terrain 1
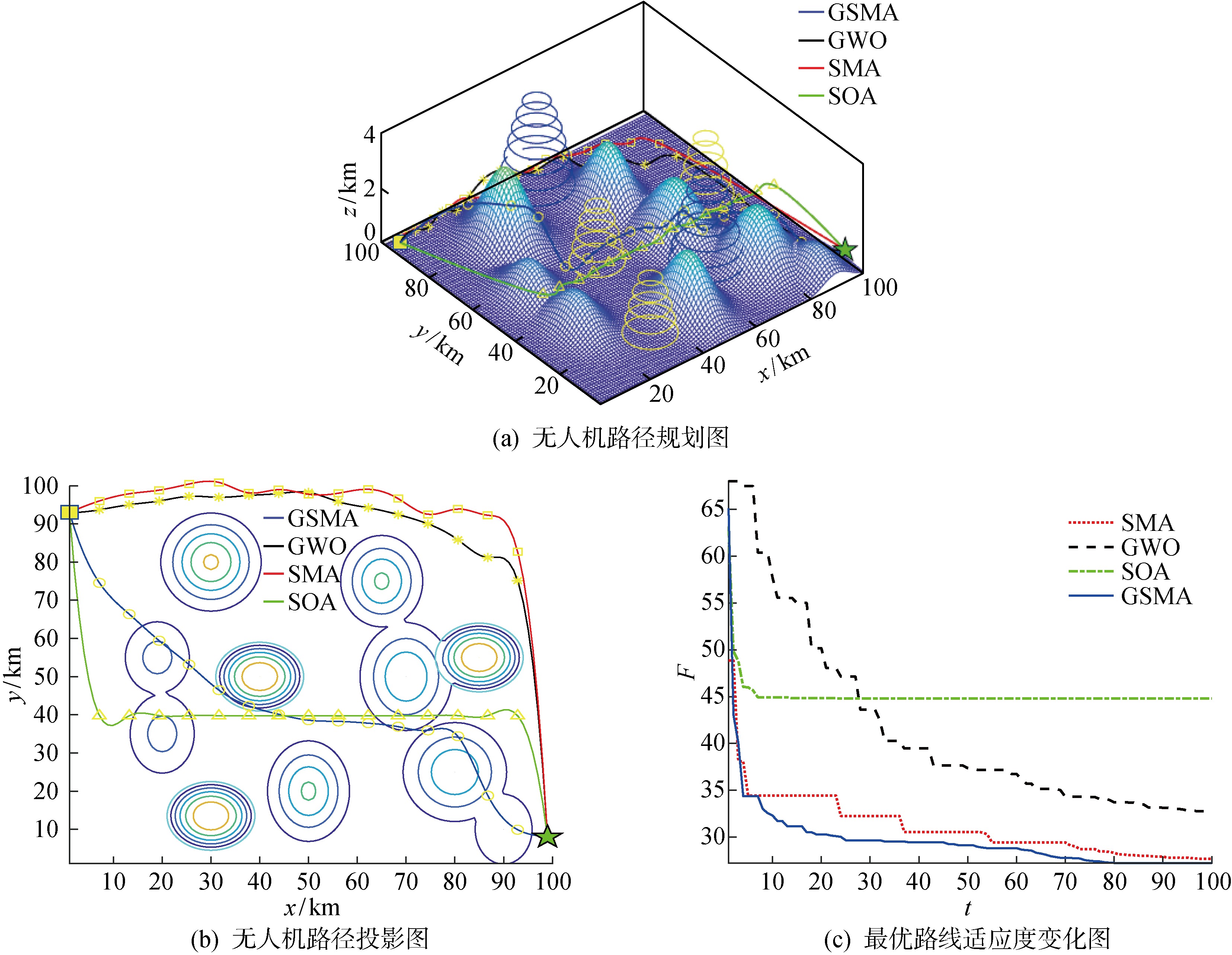

Fig.6
Simulation result of Terrain 2

Tab.3
Statistics of Terrain 1 simulation results
| 算法 | 航程/km | 最优适应度 | 转弯和 爬升角代价 | 寻优 成功率/% |
|---|---|---|---|---|
| SMA | 166.23 | 30.86 | 100 | 76 |
| GWO | 159.38 | 34.09 | 70 | 79 |
| SOA | 162.17 | 36.72 | 120 | 82 |
| GSMA | 133.54 | 29.43 | 10 | 95 |
Tab.4
Statistics of Terrain 2 simulation results
| 算法 | 航程/km | 最优 适应度 | 转弯和 爬升角代价 | 寻优 成功率/% |
|---|---|---|---|---|
| SMA | 165.43 | 27.06 | 100 | 85 |
| GWO | 163.85 | 34.37 | 80 | 78 |
| SOA | 171.65 | 37.78 | 90 | 75 |
| GSMA | 139.86 | 28.89 | 20 | 93 |
| [1] |
EVDOKIMENKOV V N, KRASILSHCHIKOV M N, LYAPIN N A. Guaranteeing UAV trajectory control when approaching a maneuvering air target[J]. Journal of Computer and Systems Sciences International, 2018, 57(5): 789-800.
doi: 10.1134/S1064230718050040 |
| [2] |
GALYAEV A A, LYSENKO P V, YAKHNO V P. 2D optimal trajectory planning problem in threat environment for UUV with non-uniform radiation pattern[J]. Sensors, 2021, 21(2): 396.
doi: 10.3390/s21020396 URL |
| [3] |
GUO Y, LIU X, ZHANG W, et al. 3D path planning method for UAV based on improved artificial potential field[J]. Journal of Northwestern Polytechnical University, 2020, 38(5): 977-986.
doi: 10.1051/jnwpu/20203850977 URL |
| [4] | MANDLOI D, ARYA R, VERMA A K. Unmanned aerial vehicle path planning based on A* algorithm and its variants in 3D environment[J]. International Journal of Systems Assurance Engineering and Management, 2021(1): 1-11. |
| [5] |
LIU X H, ZHANG D, ZHAN J, et al. A path planning method based on the particle swarm optimization trained fuzzy neural network algorithm[J]. Cluster Computing, 2021, 24(3): 1901-1915.
doi: 10.1007/s10586-021-03235-1 |
| [6] |
SOUNDARYA M S, ANUSHA D K, ROHITH P, et al. Optimal path planning of UAV using grey wolf optimiser[J]. International Journal of Computational Systems Engineering, 2019, 5(3): 129-136.
doi: 10.1504/IJCSYSE.2019.10022445 URL |
| [7] | 黄鹤, 李潇磊, 杨澜, 等. 引入改进蝠鲼觅食优化算法的水下无人航行器三维路径规划[J]. 西安交通大学学报, 2022, 56(7): 9-18. |
| HUANG He, LI Xiaolei, YANG Lan, et al. 3D path planning for unmanned underwater vehicles using improved manta foraging optimization algorithm[J]. Journal of Xi’an Jiaotong University, 2022, 56(7): 9-18. | |
| [8] | 王翼虎, 王思明. 基于改进粒子群算法的无人机路径规划[J]. 计算机工程与科学, 2020, 42(9): 1690-1696. |
| WANG Yihu, WANG Siming. UAV path planning based on improved particle swarm optimization[J]. Computer Engineering and Science, 2020, 42(9): 1690-1696. | |
| [9] |
黄书召, 田军委, 乔路, 等. 基于改进遗传算法的无人机路径规划[J]. 计算机应用, 2021, 41(2): 390-397.
doi: 10.11772/j.issn.1001-9081.2020060797 |
| HUANG Shuzhao, TIAN Junwei, QIAO Lu, et al. UAV path planning based on improved genetic algorithm[J]. Computer Application, 2021, 41(2): 390-397. | |
| [10] | 吴坤, 谭劭昌. 基于改进鲸鱼优化算法的无人机航路规划[J]. 航空学报, 2020, 41(Sup.2): 107-114. |
| WU Kun, TAN Shaochang. UAV route planning based on improved whale optimization algorithm[J]. Aeronautical Journal, 2020, 41 (Sup.2): 107-114. | |
| [11] |
LI S, CHEN H, WANG M, et al. Slime mould algorithm: A new method for stochastic optimization[J]. Future Generation Computer Systems. 2020, 111(1): 300-323.
doi: 10.1016/j.future.2020.03.055 URL |
| [12] | 肖亚宁, 孙雪. 基于混沌精英黏菌算法的无刷直流电机转速控制[J]. 科学技术与工程, 2021, 50(28): 4-5. |
| XIAO Yaning, SUN Xue. Brushless DC motor speed control based on chaotic elite slime mould algorithm[J]. Science Technology and Engineering, 2021, 50(28): 4-5. | |
| [13] |
高文欣, 刘升, 肖子雅, 等. 柯西变异和自适应权重优化的蝴蝶算法[J]. 计算机工程与应用, 2020, 56(15): 43-50.
doi: 10.3778/j.issn.1002-8331.1907-0048 |
|
GAO Wenxin, LIU Sheng, XIAO Ziya, et al. Butterfly algorithm for Cauchy variation and adaptive weight optimization[J]. Computer Engineering and Applications, 2020, 56(15): 43-50.
doi: 10.3778/j.issn.1002-8331.1907-0048 |
|
| [14] | 郭雨鑫, 刘升, 高文欣, 等. 多策略改进哈里斯鹰优化算法[J]. 微电子学与计算机, 2021, 38(7): 18-24. |
| GUO Yuxin, LIU Sheng, GAO Wenxin, et al. Multi-strategy improved Harris hawk optimization algorithm[J]. Microelectronics and Computer Science, 2021, 38(7): 18-24. | |
| [15] | 王涛. 非线性权重和柯西变异的蝗虫算法[J]. 微电子学与计算机, 2020, 37(5): 82-86. |
| WANG Tao. Locust algorithm for nonlinear weights and Cauchy variation[J]. Microelectronics and Computers, 2020, 37(5): 82-86. | |
| [16] | 王永琦, 江潇潇. 基于混合灰狼算法的机器人路径规划[J]. 计算机工程与科学, 2020, 42(7): 1294-1301. |
| WANG Yongqi, JIANG Xiaoxiao. Robot path planning based on hybrid gray wolf algorithm[J]. Computer Engineering and Science, 2020, 42(7): 1294-1301. | |
| [17] | 岳文静, 孙鹏, 陈志. 基于改进海鸥算法的认知无人机网络频谱分配[J]. 计算机技术与发展, 2021, 31(9): 7-12. |
| YUE Wenjing, SUN Peng, CHEN Zhi. Spectrum allocation for cognitive UAV networks based on improved seagull algorithm[J]. Computer Technology and Development, 2021, 31(9): 7-12. |
| [1] | Zhang Jingkai, Li Xinde, Wei Wangzichao, Wang Ziyao, Ma Ke. Synthetic Data-Driven Multi-Task Framework for UAV Detection and Classification [J]. J Shanghai Jiaotong Univ Sci, 2026, 31(1): 209-220. |
| [2] | HE Ximei, ZHAO Yisheng, XU Zhihong, CHEN Yong. Resource Allocation Method for Unmanned Aerial Vehicle-Assisted and User Cooperation Non-Linear Energy Harvesting Mobile Edge Computing System [J]. J Shanghai Jiaotong Univ Sci, 2025, 30(6): 1220-1231. |
| [3] | CUI Siyuan, LI Hao, FAN Xiangyu, NI Lei, HOU Jiahang. Multi-UAV Cooperative Target Search Method Based on AMDE-DMPC Algorithm [J]. Air & Space Defense, 2025, 8(6): 35-44. |
| [4] | WANG Zhibo, HU Weijun, MA Xianlong, QUAN Jiale, ZHOU Haoyu. Perception-Driven-Controlled UAV Interception and Collision Technology [J]. Air & Space Defense, 2025, 8(4): 78-84. |
| [5] | GE Luqin, DING Shizhou, YAO Qiang, ZHANG Cheng, HUANG Yuchen. Research Review of Electromagnetic Interference Mechanism and Anti-Interference Technology for UAVs [J]. Air & Space Defense, 2025, 8(4): 51-55. |
| [6] | Fu Zeyu, Fu Zhuang, Guan Yisheng. Vascular Interventional Surgery Path Planning and 3D Visual Navigation [J]. J Shanghai Jiaotong Univ Sci, 2025, 30(3): 472-481. |
| [7] | DONG Dejin, WANG Changcheng, CAI Yunze. An Improved Multi-Objective Evolutionary Algorithm for Grid Map Path Planning [J]. Journal of Shanghai Jiao Tong University, 2025, 59(10): 1558-1567. |
| [8] | HE Tong, WEI Yali, LU Qing, BI Qian. Path Planning and Control of UAV Cluster Cooperative Reconnaissance Multi-Point Targets [J]. Air & Space Defense, 2025, 8(1): 31-40. |
| [9] | BAI Wenchao, BAN Mingfei, SONG Meng, XIA Shiwei, LI Zhiyi, SONG Wenlong. Coordinate Scheduling Model of Electric Vehicle-Unmanned Aerial Vehicle Joint Rescue System [J]. Journal of Shanghai Jiao Tong University, 2024, 58(9): 1443-1453. |
| [10] | LIU Wenqian, SHAN Liang, ZHANG Weilong, LIU Chenglin, MA Qiang. Unmanned Aerial Vehicle Path Planning Algorithm Based on Improved Informed RRT* in Complex Environment [J]. Journal of Shanghai Jiao Tong University, 2024, 58(4): 511-524. |
| [11] | LI Xu, DONG Wei, DU Zehong. Research on Flight Path Planning Under Complex Environmental Constraints [J]. Air & Space Defense, 2024, 7(4): 99-105. |
| [12] | LIU Yuanyuan, ZHOU Leimei, LI Hao, GAO Ziyi. Review of Formation Flight Control Methods for Unmanned Autonomous Air Combat [J]. Air & Space Defense, 2024, 7(4): 47-58. |
| [13] | DONG Dejin1,2 (董德金), DONG Shiyin3 (董诗音), ZHANG Lulu1,2 (章露露), CAI Yunze1,2∗ (蔡云泽). Multi-AGVs Scheduling with Vehicle Conflict Consideration in Ship Outfitting Items Warehouse [J]. J Shanghai Jiaotong Univ Sci, 2024, 29(4): 725-736. |
| [14] | WU Xiaojing∗(武晓晶), CAO Tongyao (曹童瑶), ZHEN Ran (甄然), LI Zhijie (李志杰). AlgoTime-Varying Formation-Containment Tracking Control for Unmanned Aerial Vehicle Swarm Systems with Switching Topologies and a Non-Cooperative Target [J]. J Shanghai Jiaotong Univ Sci, 2024, 29(4): 689-701. |
| [15] | DU Haikuo1,2 (杜海阔), GUO Zhengyu3,4(郭正玉), ZHANG Lulu1,2(章露露), CAI Yunze1,2∗ (蔡云泽). Multi-Objective Loosely Synchronized Search for Multi-Objective Multi-Agent Path Finding with Asynchronous Actions [J]. J Shanghai Jiaotong Univ Sci, 2024, 29(4): 667-677. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||