Journal of Shanghai Jiao Tong University ›› 2022, Vol. 56 ›› Issue (10): 1334-1340.doi: 10.16183/j.cnki.jsjtu.2021.270
Special Issue: 《上海交通大学学报》2022年“材料科学与工程”专题
• Materials Science and Engineering • Previous Articles Next Articles
LE Jian1,2, LIU Yichun2, ZHANG Hua2, CHEN Xiaoqi1( )
)
Received:2021-07-23
Online:2022-10-28
Published:2022-11-03
Contact:
CHEN Xiaoqi
E-mail:xqchen@sjtu.edu.cn.
CLC Number:
LE Jian, LIU Yichun, ZHANG Hua, CHEN Xiaoqi. A Detection Method of Wire Feeding Speed Based on Filtering Algorithm of Distortion Signal[J]. Journal of Shanghai Jiao Tong University, 2022, 56(10): 1334-1340.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2021.270

Fig.1
Wire feeding speed detection system
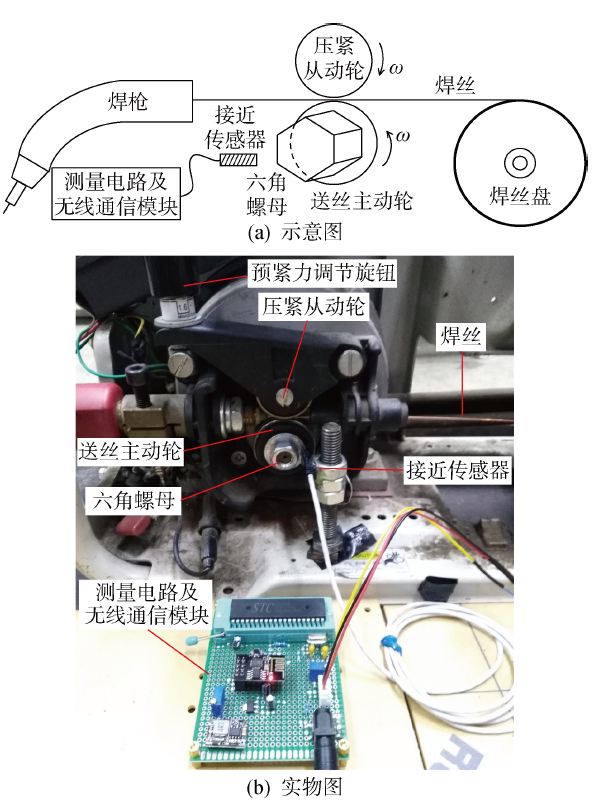
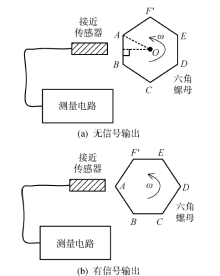
Fig.2
Wire feeding speed detection principle
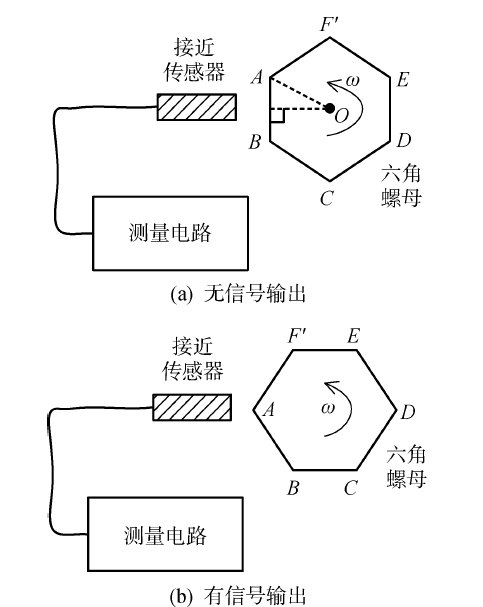
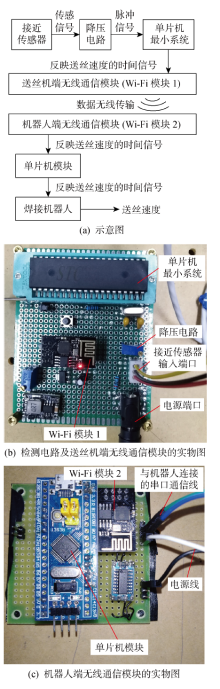
Fig.3
Hardware of wire feeding speed detection system
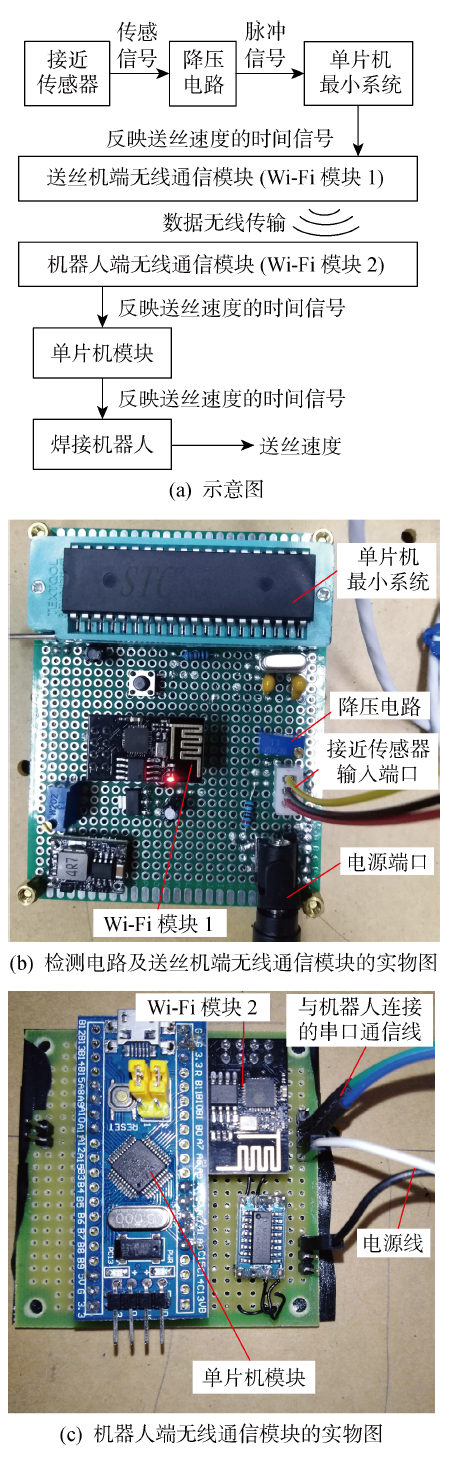

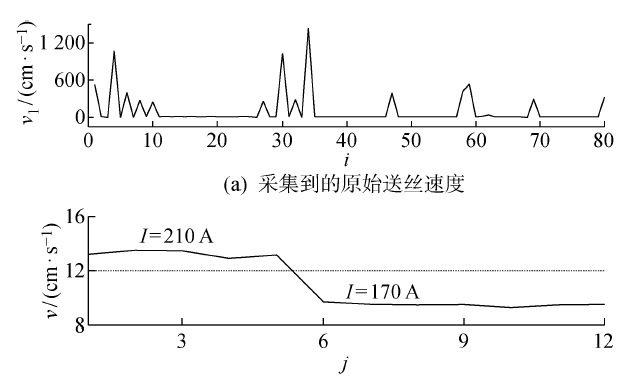
Fig.4
Wire feeding speed detection signal based on proximity sensor

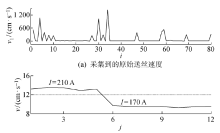
Fig.5
Curves of wire feeding speed
Tab.1
Detection accuracy of wire feeding speed
| U/V | I/A | (cm·s-1) | (cm·s-1) | δ1/% | (cm·s-1) | δ2/% |
|---|---|---|---|---|---|---|
| 25 | 170 | 9.43 | 50.08 | 431.07 | 9.51 | 0.8 |
| 25 | 210 | 14.2 | 161.86 | 1039.86 | 13.3 | 6.3 |
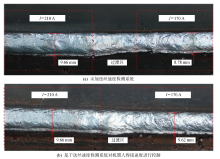
Fig.6
Influence of wire feeding speed online detection on robot welding quality of fillet weld
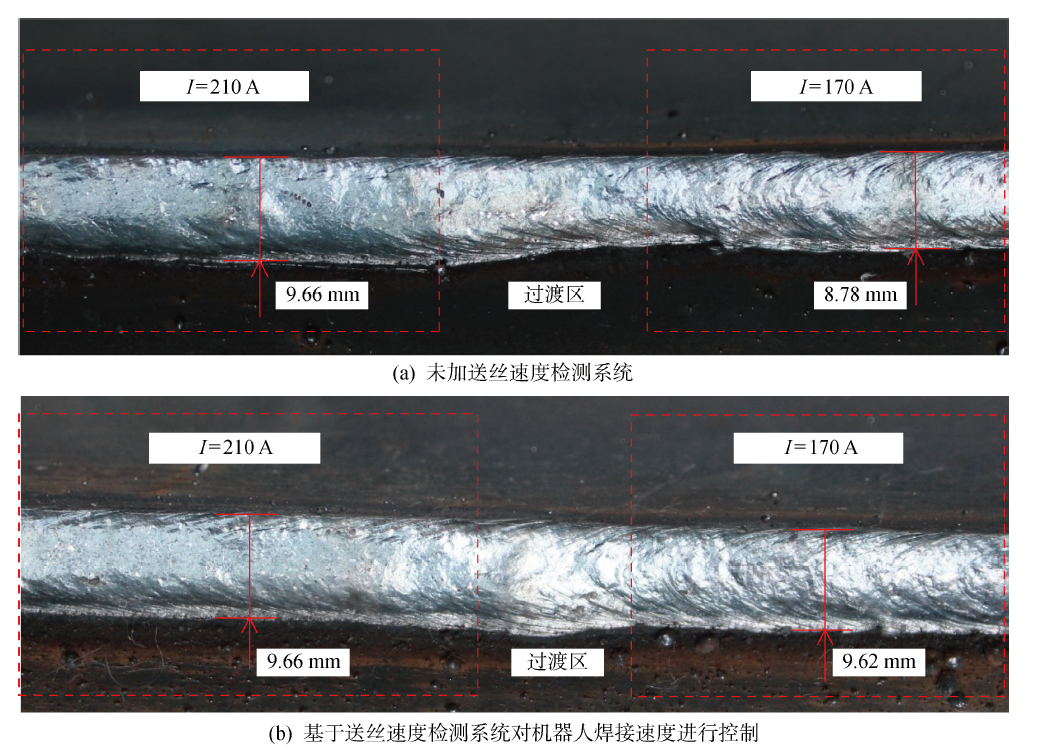
Fig.6
Scenarios of robot welding

| [1] |
PU J H, ZHAO Y, JIANG Y M, et al. Influence of wire feeding speed on the melting behavior and formation of narrow-gap joint by laser welding with filler wire[J]. Journal of Laser Applications, 2020, 32(3): 032007.
doi: 10.2351/7.0000043 URL |
| [2] | 周丹, 李翠, 易鑫, 等. 送丝速度对铝/钢激光填丝熔钎焊性能的影响[J]. 焊接, 2019(3): 38-43. |
| ZHOU Dan, LI Cui, YI Xin, et al. Influence of wire feeding speed on properties of laser weld-brazed joints of aluminum/steel[J]. Welding & Joining, 2019(3): 38-43. | |
| [3] |
NARSIMHACHARY D, SHARIFF S M, PADMANABHAM G, et al. Influence of wire feed rate on mechanical and microstructure characteristics of aluminum to galvanized steel laser brazed joint[J]. Journal of Manufacturing Processes, 2019, 39: 271-281.
doi: 10.1016/j.jmapro.2019.02.017 URL |
| [4] |
MILANI A M, PAIDAR M, KHODABANDEH A, et al. Influence of filler wire and wire feed speed on metallurgical and mechanical properties of MIG welding-brazing of automotive galvanized steel/5754 aluminum alloy in a lap joint configuration[J]. International Journal of Advanced Manufacturing Technology, 2016, 82(9/10/11/12): 1495-1506.
doi: 10.1007/s00170-015-7505-4 URL |
| [5] | 殷传亚, 邢彦锋, 金光灿, 等. 送丝速度对6061铝合金/DP590镀锌钢CMT点塞焊接头性能的影响[J]. 热加工工艺, 2018, 47(11): 183-185. |
| YIN Chuanya, XING Yanfeng, JIN Guangcan, et al. Effects of wire feeding speed on properties of CMT spot plug welding joint of 6061 aluminum alloy and DP590 galvanized steel[J]. Hot Working Technology, 2018, 47(11): 183-185. | |
| [6] | 黄麒霖, 张延松. 送丝速度对铝合金脉冲MIG焊能量输入及温度场数值仿真的影响[J]. 热加工工艺, 2021, 50(1): 112-116. |
| HUANG Qilin, ZHANG Yansong. Influence of wire feeding speed on heat input and temperature field numerical simulation of pulse MIG welding for aluminum alloy[J]. Hot Working Technology, 2021, 50(1): 112-116. | |
| [7] |
WANG J F, SUN Q J, MA J K, et al. Correlation between wire feed speed and external mechanical constraint for enhanced process stability in underwater wet flux-cored arc welding[J]. Proceedings of the Institution of Mechanical Engineers Part B: Journal of Engineering Manufacture, 2019, 233(10): 2061-2073.
doi: 10.1177/0954405418811783 URL |
| [8] | 于世宝, 刘翥寰, 史涛, 等. 送丝速度对三丝间接电弧焊稳定性及焊缝成形的影响[J]. 焊接技术, 2021, 50(1): 35-39. |
| YU Shibao, LIU Zhuhuan, SHI Tao, et al. Effect of wire feeding speed on the stability and weld formation of triple-wire indirect arc welding[J]. Welding Technology, 2021, 50(1): 35-39. | |
| [9] |
HUANG L, CHEN X Z, KONOVALOV S, et al. The effect of wire feeding speed on solidification cracking of CMT welding for Al-Si alloys[J]. Metals, 2021, 11(2): 267.
doi: 10.3390/met11020267 URL |
| [10] | 张栋, 陈茂爱, 武传松. 高速CMT焊送丝速度和焊接电流波形参数的优化[J]. 焊接学报, 2018, 39(1): 119-122. |
| ZHANG Dong, CHEN Maoai, WU Chuansong. Optimization of waveform parameters for high speed CMT welding of steel[J]. Transactions of the China Welding Institution, 2018, 39(1): 119-122. | |
| [11] |
YAO P, XUE J X, ZHOU K. Study on the wire feed speed prediction of double-wire-pulsed MIG welding based on support vector machine regression[J]. International Journal of Advanced Manufacturing Technology, 2015, 79(9/10/11/12): 2107-2116.
doi: 10.1007/s00170-015-7039-9 URL |
| [1] | WANG Zhelan, ZHAO Hongjie, ZHAO Fan, SHEN Chenchen, WU Jiawei. Establishment of Remaining Life Prediction Model for an Inertial Navigation System Based on Convolutional Neural Network and Filtering Fusion Algorithm [J]. Air & Space Defense, 2023, 6(1): 70-77. |
| [2] | XIONG Yuefu (熊越夫), WU Xiaosheng∗ (吴校生), ZENG Zhaofeng (曾照丰), HUANG Shan (黄山), CHEN Tianpei (陈天培). High Precision Temperature Measurement for Microfluidic Chip Applications [J]. J Shanghai Jiaotong Univ Sci, 2022, 27(5): 699-705. |
| [3] | ZHANG Shuai, DING Liping, WANG Zhide, TANG Xiaofeng, FAN Wenjing. Research on Reliability of Power on Reset of CSD Serial Board in Launch Control Equipment [J]. Air & Space Defense, 2020, 3(2): 29-36. |
| [4] | PAN Yi-Biao-1, YUAN Jing-Qi-1, ZHU Kai-1, CHEN Yu-2, ZHANG Rui-Feng-2. Online Detection of Abnormal Data Based on Multilayer Perceptron [J]. Journal of Shanghai Jiaotong University, 2011, 45(08): 1226-1229. |
| [5] |
DU Gang1,JIANG Zhibin1,DIAO Xiaodi2,YAO Yang3 . Variances Handling for Clinical Pathway Based on Takagi-Sugeno FNNs with Random Cooperative Decomposing PSO Optimization [J]. Journal of Shanghai Jiaotong University, 2010, 44(08): 1120-1124. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||