Journal of Shanghai Jiao Tong University ›› 2023, Vol. 57 ›› Issue (3): 297-308.doi: 10.16183/j.cnki.jsjtu.2021.301
Special Issue: 《上海交通大学学报》2023年“机械与动力工程”专题
• Mechanical Engineering • Previous Articles Next Articles
ZHAN Yan1, CHEN Zhihui1, ZHU Baochang2,3, ZHU Tingting2, SHAO Yiping1,2( ), LU Jiansha1
), LU Jiansha1
Received:2021-08-12
Accepted:2021-10-08
Online:2023-03-28
Published:2023-03-30
CLC Number:
ZHAN Yan, CHEN Zhihui, ZHU Baochang, ZHU Tingting, SHAO Yiping, LU Jiansha. A Pallet Recognition Method Based on Adaptive Color Fast Point Feature Histogram[J]. Journal of Shanghai Jiao Tong University, 2023, 57(3): 297-308.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2021.301

Fig.1
Flow chart of object recognition algorithm


Fig.2
Point cloud of original scene and schematic diagram of outlier elimination


Fig.3
Schematic diagram of plane segmentation of scene point cloud

Tab.1
Dimensional characteristics judgment of local neighborhood of point cloud
| 特征值关系式 | 点云局部邻域维度特性 |
|---|---|
| λ1?λ2, λ2≈λ3 | 一维线状特征 |
| λ1≈λ2, λ2?λ3 | 二维面状特征 |
| λ1≈λ2, λ2≈λ3 | 三维散乱点特征 |
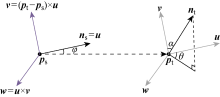
Fig.4
Schematic diagram of local coordinate system

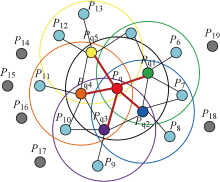
Fig.5
Neighborhood influence range of FPFH
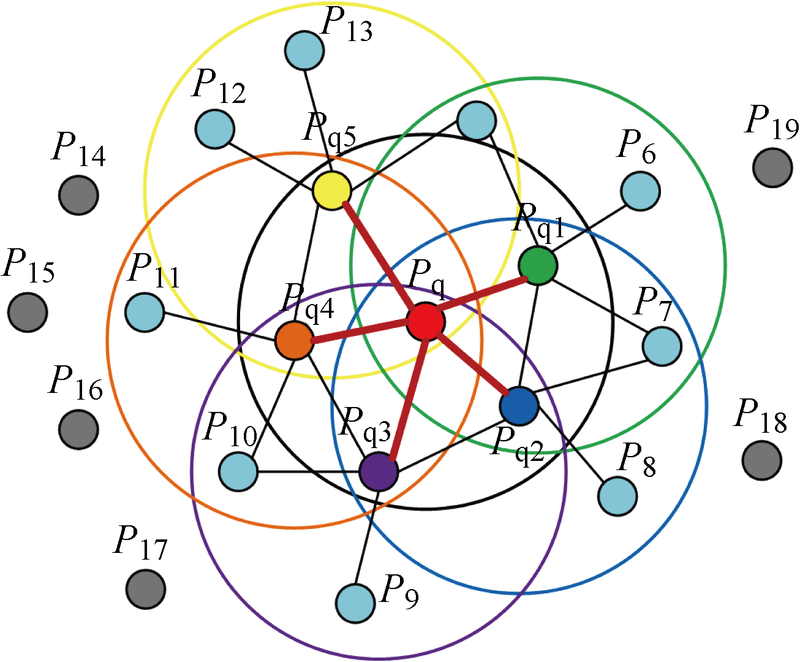
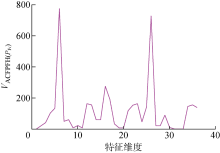
Fig.6
Schematic of V A C F P F H ( P F i )
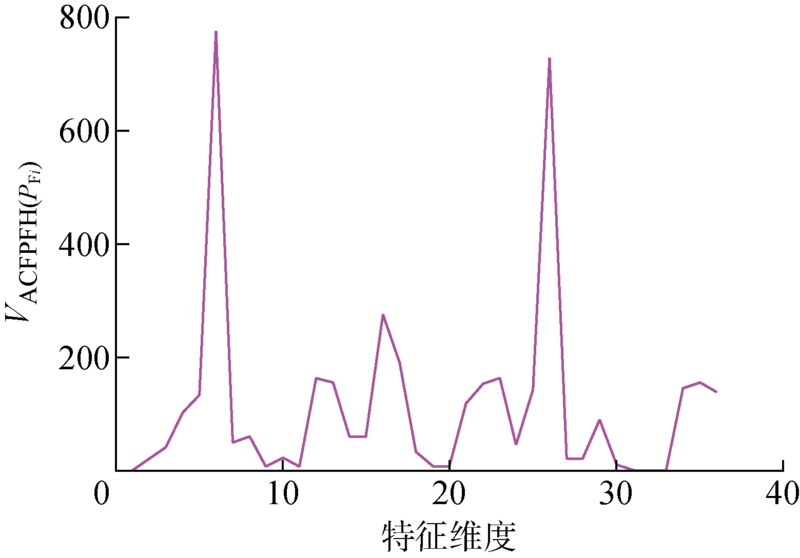

Fig.7
Feature matching and elimination of mismatching point pairs
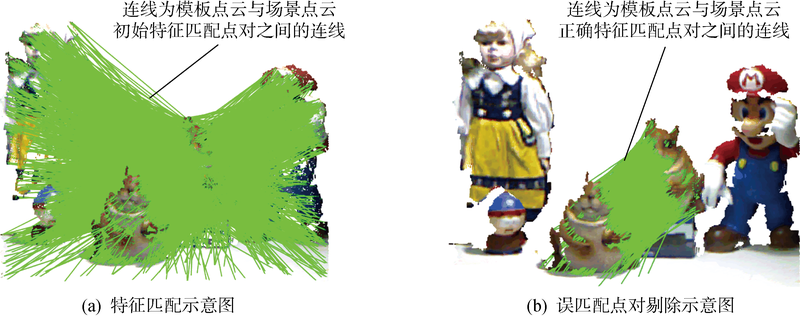
Fig.8
Schematic diagram of structure of Kinect V2
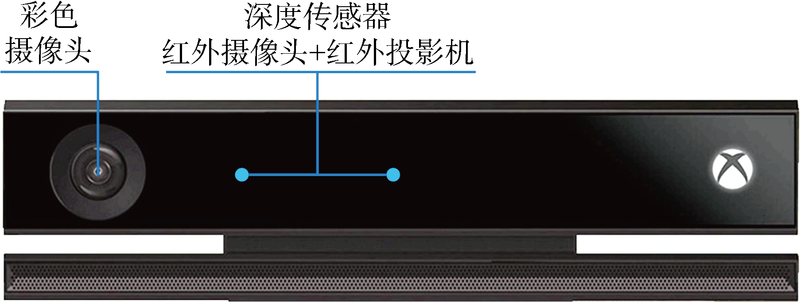

Fig.9
Diagram of Kinect V2 sensor installation position

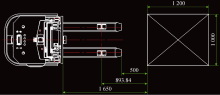
Fig.10
Schematic diagram of acquisition of point cloud data distance (mm)

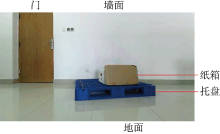
Fig.11
Color image of original scene
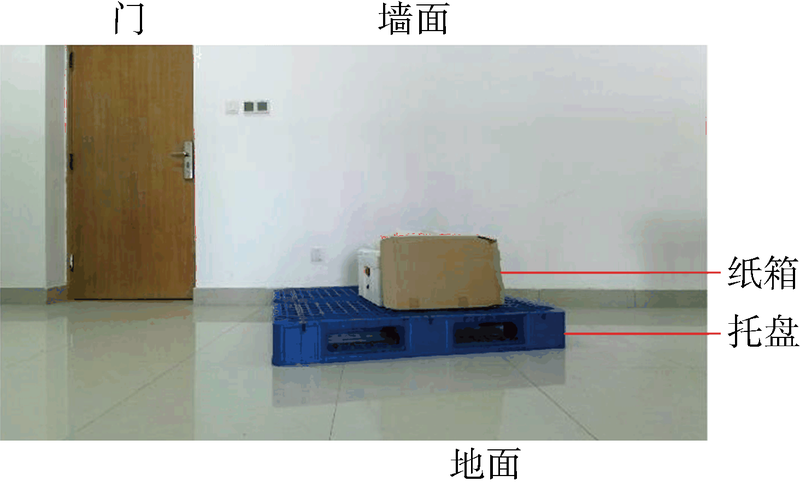
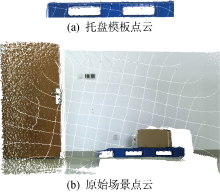
Fig.12
Pallet template point cloud and original scene point cloud

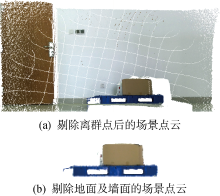
Fig.13
Preprocessing of scene point cloud


Fig.14
Key points of pallet template point cloud and original scene point cloud
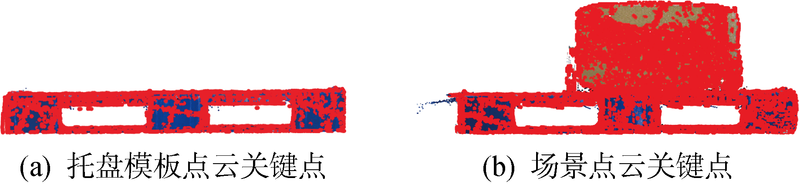

Fig.15
Distribution of ropt of point cloud


Fig.16
Result of feature matching
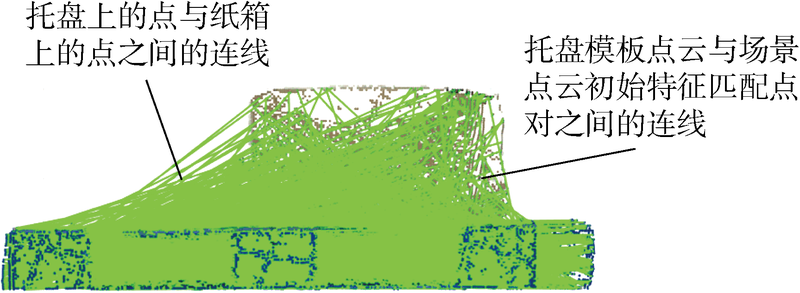
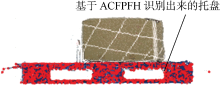
Fig.17
Pallet recognition result in scene point cloud
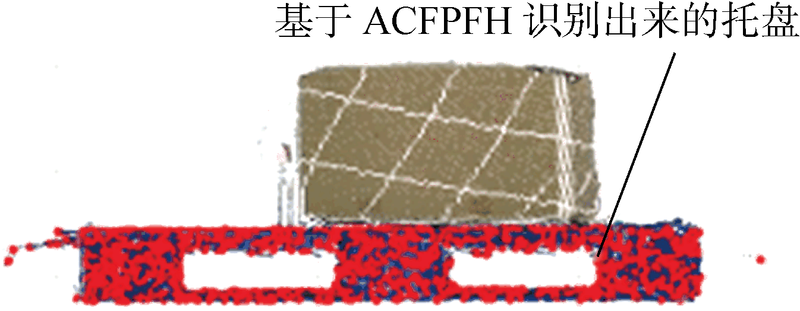

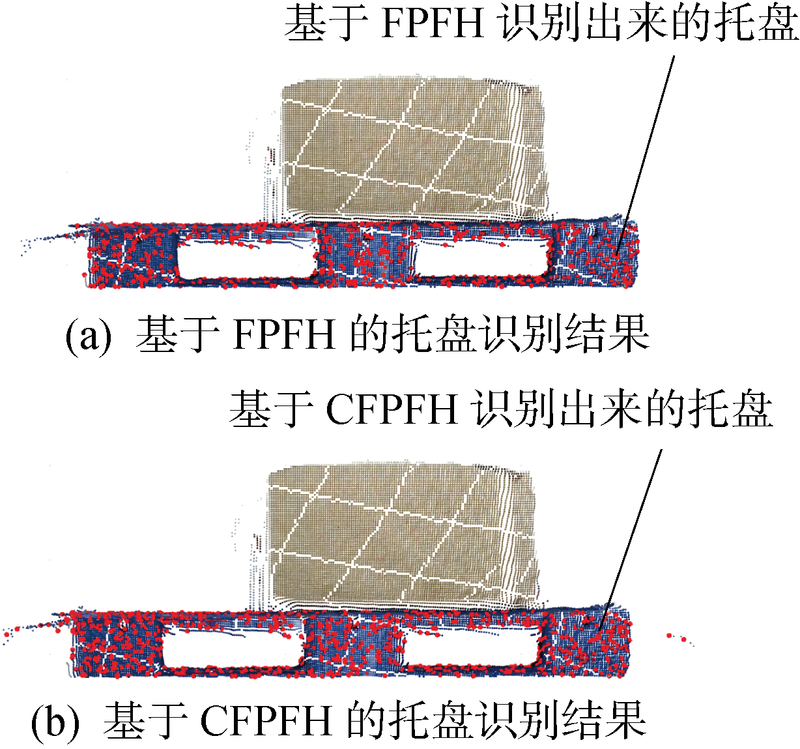
Fig.18
Pallet recognition results of different feature descriptors in scene point cloud
Tab.2
Comparison of number and interval of matching points of different feature descriptors
| 特征描述符 | 正确匹配点数量 | 正确匹配点对占初始 匹配点对比率/% | 正确匹配点间的 平均距离间隔/m | |
|---|---|---|---|---|
| 名称 | r/m | |||
| FPFH | 0.015 | 183 | 8.31 | 0.054 |
| CFPFH | 0.015 | 332 | 9.87 | 0.039 |
| ACFPFH | 自适应 | 759 | 14.35 | 0.025 |
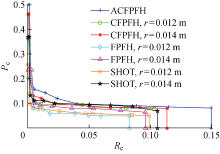
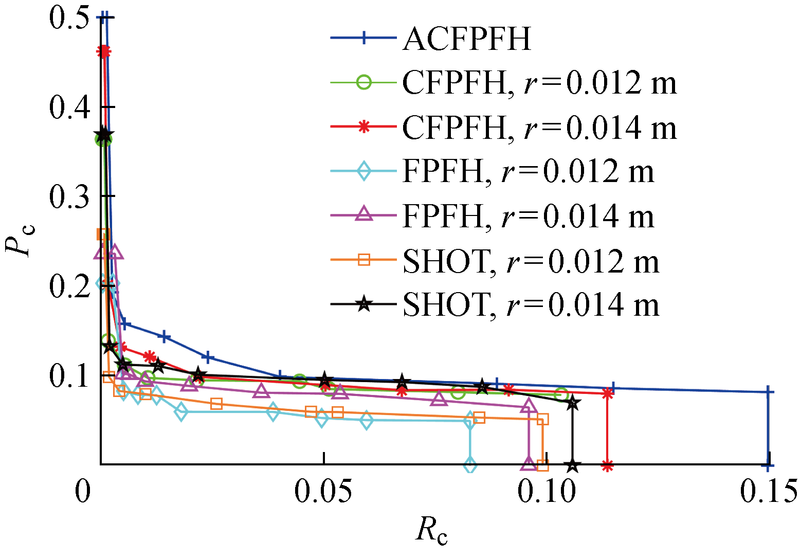
Fig.19
Curves of P-R of different feature descriptors
Tab.3
Precision comparison of different feature descriptors
| 名称 | 特征描述 符特征 维度 | r/m | dth = 0.75 | ACFPFH与PFD 对比/% | |
|---|---|---|---|---|---|
| Rc | Pc | ||||
| SHOT | 352 | 0.012 | 0.009 7 | 0.079 4 | 44.67 |
| 0.014 | 0.012 5 | 0.110 8 | 22.79 | ||
| FPFH | 33 | 0.012 | 0.012 2 | 0.078 1 | 83.74 |
| 0.014 | 0.009 6 | 0.093 6 | 53.31 | ||
| CFPFH | 36 | 0.012 | 0.010 2 | 0.097 5 | 47.17 |
| 0.014 | 0.010 6 | 0.120 8 | 18.79 | ||
| ACFPFH | 36 | 自适应最优 | 0.013 8 | 0.143 5 | |
Tab.4
Comparison of feature extraction time of different feature descriptors
| 名称 | 特征描述符 特征维度 | r/m | 场景点云 特征提取 用时/s | ACFPFH与tFD 对比/% |
|---|---|---|---|---|
| SHOT | 352 | 0.012 | 142.256 | 28.26 |
| 0.014 | 407.324 | 74.95 | ||
| FPFH | 33 | 0.012 | 158.339 | 35.55 |
| 0.014 | 383.760 | 73.41 | ||
| CFPFH | 36 | 0.012 | 180.602 | 43.49 |
| 0.014 | 416.313 | 75.49 | ||
| ACFPFH | 36 | 自适应最优 | 102.053 |
| [1] |
CASADO F, LAPIDO Y L, LOSADA D P, et al. Pose estimation and object tracking using 2D images[J]. Procedia Manufacturing, 2017, 11: 63-71.
doi: 10.1016/j.promfg.2017.07.134 URL |
| [2] | 王伟男, 杨朝红. 基于图像处理技术的目标识别方法综述[J]. 电脑与信息技术, 2019, 27(6): 9-15. |
| WANG Weinan, YANG Chaohong. A survey of target recognition methods based on image processing technology[J]. Computer and Information Technology, 2019, 27(6): 9-15. | |
| [3] |
郝雯, 王映辉, 宁小娟, 等. 面向点云的三维物体识别方法综述[J]. 计算机科学, 2017, 44(9): 11-16.
doi: 10.11896/j.issn.1002-137X.2017.09.002 |
|
HAO Wen, WANG Yinghui, NING Xiaojuan, et al. Survey of 3D object recognition for point clouds[J]. Computer Science, 2017, 44(9): 11-16.
doi: 10.11896/j.issn.1002-137X.2017.09.002 |
|
| [4] |
GARCÍA-PULIDO J A, PAJARES G, DORMIDO S, et al. Recognition of a landing platform for unmanned aerial vehicles by using computer vision-based techniques[J]. Expert Systems With Applications, 2017, 76: 152-165.
doi: 10.1016/j.eswa.2017.01.017 URL |
| [5] |
CHEN J M, CHEN L P. Multi-dimensional color image recognition and mining based on feature mining algorithm[J]. Automatic Control and Computer Sciences, 2021, 55(2): 195-201.
doi: 10.3103/S0146411621020048 |
| [6] |
SEIDENARI L, SERRA G, BAGDANOV A D, et al. Local pyramidal descriptors for image recognition[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2014, 36(5): 1033-1040.
doi: 10.1109/TPAMI.2013.232 pmid: 26353235 |
| [7] | CHEN G, PENG R, WANG Z C, et al. Pallet recognition and localization method for vision guided forklift[C]// 2012 8th International Conference on Wireless Communications, Networking and Mobile Computing. Shanghai, China: IEEE, 2012: 1-4. |
| [8] |
SYU J L, LI H T, CHIANG J S, et al. A computer vision assisted system for autonomous forklift vehicles in real factory environment[J]. Multimedia Tools and Applications, 2017, 76(18): 18387-18407.
doi: 10.1007/s11042-016-4123-6 URL |
| [9] |
LI T J, HUANG B, LI C, et al. Application of convolution neural network object detection algorithm in logistics warehouse[J]. The Journal of Engineering, 2019, 2019(23): 9053-9058.
doi: 10.1049/tje2.v2019.23 URL |
| [10] |
SHAO Y P, WANG K, DU S C, et al. High definition metrology enabled three dimensional discontinuous surface filtering by extended tetrolet transform[J]. Journal of Manufacturing Systems, 2018, 49: 75-92.
doi: 10.1016/j.jmsy.2018.09.002 URL |
| [11] | SHAO Y P, DU S C, TANG H T. An extended bi-dimensional empirical wavelet transform based filtering approach for engineering surface separation using high definition metrology[J]. Measurement, 2021, 178: 109259. |
| [12] | 武文汉, 杨明, 王冰, 等. 一种基于轮廓匹配的仓储机器人托盘检测方法[J]. 上海交通大学学报, 2019, 53(2): 197-202. |
| WU Wenhan, YANG Ming, WANG Bing, et al. Pallet detection based on contour matching for warehouse robots[J]. Journal of Shanghai Jiao Tong University, 2019, 53(2): 197-202. | |
| [13] | XIAO J H, LU H M, ZHANG L L, et al. Pallet recognition and localization using an RGB-D camera[J]. International Journal of Advanced Robotic Systems, 2017, 14(6): 172988141773779. |
| [14] | VARGA R, COSTEA A, NEDEVSCHI S. Improved autonomous load handling with stereo cameras[C]// 2015 IEEE International Conference on Intelligent Computer Communication and Processing. Cluj-Napoca, Romania: IEEE, 2015: 251-256. |
| [15] | VARGA R, NEDEVSCHI S. Robust pallet detection for automated logistics operations[C]// Proceedings of the 11th Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications. Rome, Italy: SCITEPRESS-Science and Technology Publications, 2016: 470-477. |
| [16] | 吴登禄, 曹文希, 朱颖. 基于三维点云和图像边缘的托盘检测技术研究[J]. 自动化与信息工程, 2019, 40(3): 40-42. |
| WU Denglu, CAO Wenxi, ZHU Ying. Research on pallet detection technology based on 3D point cloud and image edge features[J]. Automation & Information Engineering, 2019, 40(3): 40-42. | |
| [17] | 李洋洋, 史历程, 万卫兵, 等. 基于卷积神经网络的三维物体检测方法[J]. 上海交通大学学报, 2018, 52(1): 7-12. |
| LI Yangyang, SHI Licheng, WAN Weibing, et al. A convolutional neural network-based method for 3D object detection[J]. Journal of Shanghai Jiao Tong University, 2018, 52(1): 7-12. | |
| [18] | TERABAYASHI K, TAKASHIMA I, SUZUKI Y, et al. Easy acquisition of range image dataset for object detection using retroreflective markers and a time-of-flight camera: An application to detection of forklift pallets[C]// Proceedings of the Seventh Asia International Symposium on Mechatronics. Hangzhou, China: Springer Singapore, 2020: 1001-1005. |
| [19] | 郭裕兰, 鲁敏, 谭志国, 等. 距离图像局部特征提取方法综述[J]. 模式识别与人工智能, 2012, 25(5): 783-791. |
| GUO Yulan, LU Min, TAN Zhiguo, et al. Survey of local feature extraction on range images[J]. Pattern Recognition and Artificial Intelligence, 2012, 25(5): 783-791. | |
| [20] |
PRAKHYA S M, LIN J, CHANDRASEKHAR V, et al. 3DHoPD: A fast low-dimensional 3-D descriptor[J]. IEEE Robotics and Automation Letters, 2017, 2(3): 1472-1479.
doi: 10.1109/LRA.2017.2667721 URL |
| [21] | RUSU R B, BLODOW N, BEETZ M. Fast point feature histograms (FPFH) for 3D registration[C]// 2009 IEEE International Conference on Robotics and Automation. Kobe, Japan: IEEE, 2009: 3212-3217. |
| [22] |
GUO Y L, BENNAMOUN M, SOHEL F, et al. A comprehensive performance evaluation of 3D local feature descriptors[J]. International Journal of Computer Vision, 2016, 116(1): 66-89.
doi: 10.1007/s11263-015-0824-y URL |
| [23] | HUANG J, YOU S Y. Detecting objects in scene point cloud: A combinational approach[C]// 2013 International Conference on 3D Vision-3DV 2013. Seattle, WA, USA: IEEE, 2013: 175-182. |
| [24] | 王斐, 梁宸, 韩晓光, 等. 基于焊件识别与位姿估计的焊接机器人视觉引导[J]. 控制与决策, 2020, 35(8): 1873-1878. |
| WANG Fei, LIANG Chen, HAN Xiaoguang, et al. Visual guidance of welding robot based on weldment recognition and pose estimation[J]. Control and Decision, 2020, 35(8): 1873-1878. | |
| [25] |
LIU J, BAI D, CHEN L. 3-D point cloud registration algorithm based on greedy projection triangulation[J]. Applied Sciences, 2018, 8(10): 1776.
doi: 10.3390/app8101776 URL |
| [26] | LI P, WANG J, ZHAO Y D, et al. Improved algorithm for point cloud registration based on fast point feature histograms[J]. Journal of Applied Remote Sensing, 2016, 10: 045024. |
| [27] |
NAPOLI A, GLASS S, WARD C, et al. Performance analysis of a generalized motion capture system using microsoft kinect 2.0[J]. Biomedical Signal Processing and Control, 2017, 38: 265-280.
doi: 10.1016/j.bspc.2017.06.006 URL |
| [28] | DEMANTKE J, MALLET C, DAVID N, et al. Dimensionality based scale selection in 3D LIDAR point clouds[C]// ISPRS Workshop Laser Scanning. Calgary, Canada: Copernicus Gesellschaft Mbh, 2011: 97-102. |
| [29] | WEINMANN M, JUTZI B, MALLET C. Semantic 3D scene interpretation: A framework combining optimal neighborhood size selection with relevant features[J]. Photogrammetry, Remote Sensing and Spatial Information Sciences, 2014, 2(3): 181-188. |
| [30] | 王红雨, 尹午荣, 汪梁, 等. 基于HSV颜色空间的快速边缘提取算法[J]. 上海交通大学学报, 2019, 53(7): 765-772. |
| WANG Hongyu, YIN Wurong, WANG Liang, et al. Fast edge extraction algorithm based on HSV color space[J]. Journal of Shanghai Jiao Tong University, 2019, 53(7): 765-772 | |
| [31] | 熊风光, 蔡晋茹, 况立群, 等. 三维点云模型中特征点描述子及其匹配算法研究[J]. 小型微型计算机系统, 2017, 38(3): 640-644. |
| XIONG Fengguang, CAI Jinru, KUANG Liqun, et al. Study on descriptor and matching algorithm of feature point in 3D point cloud[J]. Journal of Chinese Computer Systems, 2017, 38(3): 640-644. | |
| [32] |
唐敏杰, 赵欢, 丁汉. 二进制点云局部特征描述子研究[J]. 机械工程学报, 2021, 57(2): 219-229.
doi: 10.3901/JME.2021.02.219 |
|
TANG Minjie, ZHAO Huan, DING Han. Research on binarized local feature descriptors of point clouds[J]. Journal of Mechanical Engineering, 2021, 57(2): 219-229.
doi: 10.3901/JME.2021.02.219 |
| [1] | ZHU Feng, SHAN Chao, WU Ning, CAI Qixin, ZHU Yunan, LIU Yunpeng, ZUO Qiang. Feature Extraction and Anomaly Identification Method for Power Customer Price in Power Market Enviroment [J]. Journal of Shanghai Jiao Tong University, 2025, 59(7): 995-1006. |
| [2] | SHAO Yanli, YING Yong, CHEN Xi, DONG Siyu, WEI Dan. Multi-Scene Smoke Detection Based on Multi-Feature Extraction Method [J]. J Shanghai Jiaotong Univ Sci, 2025, 30(5): 866-879. |
| [3] | LIU Zengmin (刘增敏), WANG Shentao(王申涛), YAO Lixiu(姚莉秀), CAI Yunze(蔡云泽). Online Multi-Object Tracking Under Moving Unmanned Aerial Vehicle Platform Based on Object Detection and Feature Extraction Network [J]. J Shanghai Jiaotong Univ Sci, 2024, 29(3): 388-399. |
| [4] | NIU Guochen, SUN Xiangyu, YUAN Zhengyan. Vehicle-Road Collaborative Perception Method Based on Dual-Stream Feature Extraction [J]. Journal of Shanghai Jiao Tong University, 2024, 58(11): 1826-1834. |
| [5] | ZENG Zhirian(曾志贤),CAO Jianjun*(曹建军),WENG Nianfeng(翁年凤),YUAN Zhen(袁震),YU Xu(余旭). Cross-Modal Entity Resolution for Image and Text Integrating Global and Fine-Grained Joint Attention Mechanism [J]. J Shanghai Jiaotong Univ Sci, 2023, 28(6): 728-737. |
| [6] | HUANG Jiayang (黄嘉阳), YANG Pengfei* (杨鹏飞), WAN Bo (万波), ZHANG Zhiqiang (张志强). KDLPCCA-Based Projection for Feature Extraction in SSVEP-Based Brain-Computer Interfaces [J]. J Shanghai Jiaotong Univ Sci, 2022, 27(2): 168-175. |
| [7] | ZHANG Yanhe, ZANG Yuejin, CHEN Bo, XU Mingsheng. Radar HRRP Target Recognition Algorithm Based on Variational Auto-encoder with Disentangled Representation [J]. Air & Space Defense, 2022, 5(2): 87-93. |
| [8] | WANG Wei, WANG Bing, HU Xiong, SUN Dejian. Online Degradation Assessment of Shore Bridge Hoisting Gearbox Based on Improved Symbolic Sequence Entropy and Logistic Regression Model [J]. Journal of Shanghai Jiao Tong University, 2021, 55(10): 1272-1280. |
| [9] | WANG Jun, WANG Sai, REN Yuming, CHEN Dehong, CUI Shan, WEI Shaoming. Combining Denoising with Super Resolution for Target Detection and Recognition of SAR Image Based on Deep Learning [J]. Air & Space Defense, 2020, 3(3): 24-30. |
| [10] | SHANG Nuonuo, LIANG Yan, ZHAI Hengfeng, YUAN Haojuan. An Efficient Method of Full-pulse Feature Extraction for Radar Signals [J]. Air & Space Defense, 2018, 1(4): 37-43. |
| [11] | WANG Rui,LIU Bin,ZHOU Tianrun,YANG Yu. Vehicle Recognition in Acoustic and Seismic Networks via Collaboration Representation [J]. Journal of Shanghai Jiao Tong University, 2018, 52(1): 103-110. |
| [12] | WANG Yukui1,2* (王余奎), HUANG Zhijie1 (黄之杰), ZHAO Xucheng1 (赵徐成), ZHU Yi1 (朱 毅), WEI Dongtao1 (魏东涛). A Novel De-noising Method Based on Discrete Cosine Transform and Its Application in the Fault Feature Extraction of Hydraulic Pump [J]. Journal of shanghai Jiaotong University (Science), 2016, 21(3): 297-306. |
| [13] | LI Hong-kun1 (李宏坤), ZHANG Zhi-xin2* (张志新), LI Xiu-gang3 (李秀刚), REN Yuan-jie1 (任远杰). Reliability Prediction Method Based on State Space Model for Rolling Element Bearing [J]. Journal of shanghai Jiaotong University (Science), 2015, 20(3): 317-321. |
| [14] | WEN Cheng-yu* (文成玉), DONG Liang (董良), JIN Xin (金欣). Feature Extraction of Bearing Vibration Signals Using Second Generation Wavelet and Spline-Based Local Mean Decomposition [J]. Journal of shanghai Jiaotong University (Science), 2015, 20(1): 56-60. |
| [15] | WANG Siyang,XU Liming,LAI Xiaoping. Grinding Wheel Overload Criterion and Diagnosis [J]. Journal of Shanghai Jiaotong University, 2015, 49(09): 1346-1352. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||