Journal of Shanghai Jiao Tong University ›› 2022, Vol. 56 ›› Issue (7): 944-952.doi: 10.16183/j.cnki.jsjtu.2021.375
Special Issue: 《上海交通大学学报》2022年“交通运输工程”专题
• Transportation Engineering • Previous Articles Next Articles
LI Jinjiang, XIANG Xianbo( ), LIU Chuan, YANG Shaolong
), LIU Chuan, YANG Shaolong
Received:2021-09-26
Online:2022-07-28
Published:2022-08-16
Contact:
XIANG Xianbo
E-mail:xbxiang@hust.edu.cn.
CLC Number:
LI Jinjiang, XIANG Xianbo, LIU Chuan, YANG Shaolong. Robust Seabed Terrain Following Control of Underactuated AUV with Prescribed Performance Guidance Law Under Time Delay of Actuator[J]. Journal of Shanghai Jiao Tong University, 2022, 56(7): 944-952.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.sjtu.edu.cn/EN/10.16183/j.cnki.jsjtu.2021.375
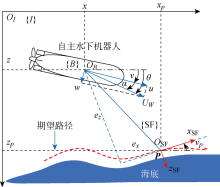
Fig.1
Uneven seabed terrain following of the AUV

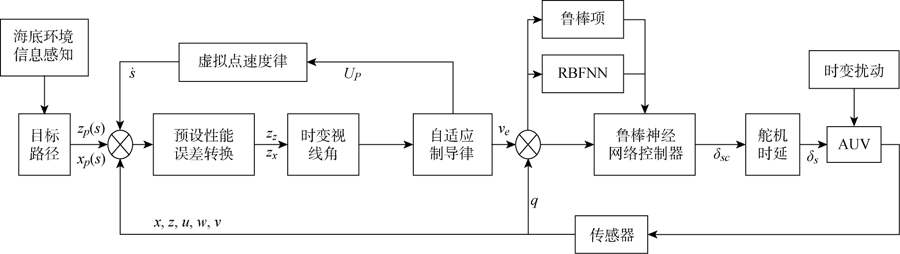
Fig.2
Block diagram of the prescribed performance guidance law based robust time-delay controller
Tab.1
Hydrodynamic model parameter of the AUV in simulation
| 参数 | 取值 |
|---|---|
| m/kg | 30.48 |
| W/N | 299 |
| B/N | 306 |
| Iyy/(N·kg·m2) | 3.45 |
| xg/m | 0 |
| zg/m | 0.019 6 |
| | -4.88 |
| | -1.93 |
| Mw|w|/kg | 3.18 |
| Mq|q|/(kg·m2·rad-2) | -188 |
| Muq/(kg·m·rad-1) | -2 |
| Muw/kg | 24 |
| Muuδ/(kg·rad-1) | -6.15 |
| | -35.5 |
| zw|w|/(kg·m-1) | -131 |
| zq|q|/(kg·m2·rad-2) | -0.632 |
| zuw/(kg·m-1) | -28.6 |
| zuq/(kg·rad-1) | -5.22 |
| λδ/s | 1.2 |
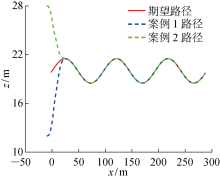
Fig.3
Path following results of different cases
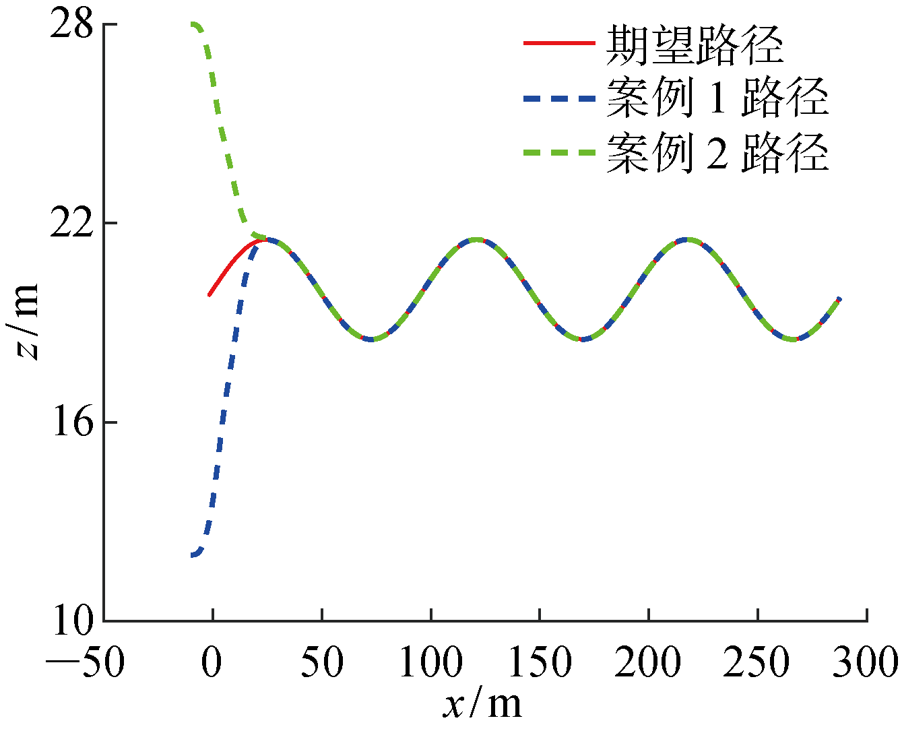
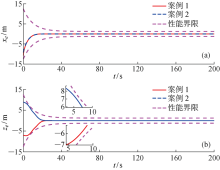
Fig.4
Path following errors and prescribed performance limits of different cases
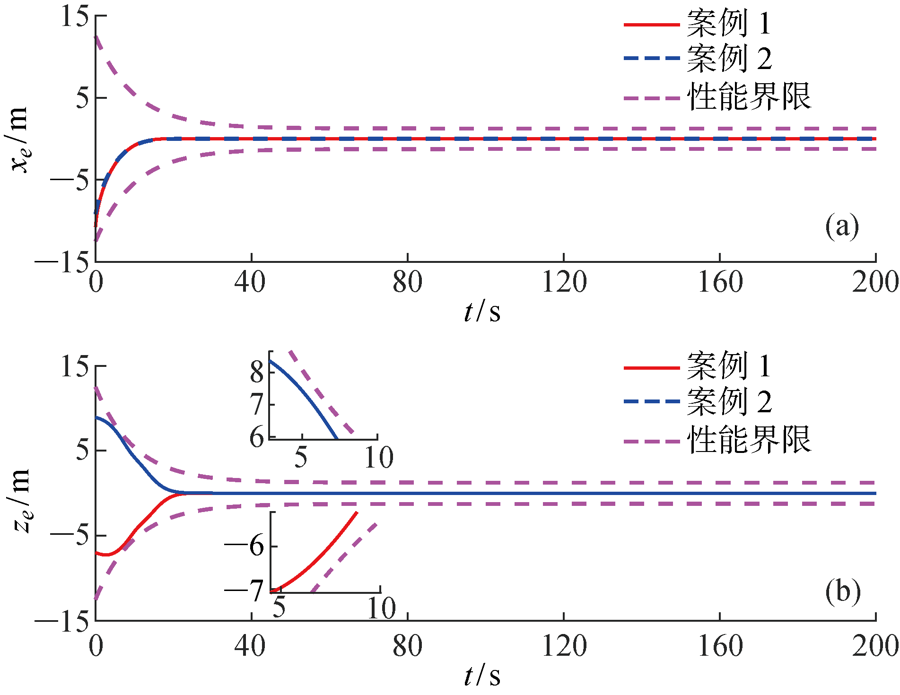
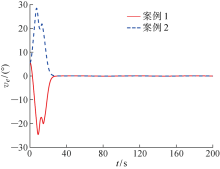
Fig.5
Elevation angle tracking error of AUV
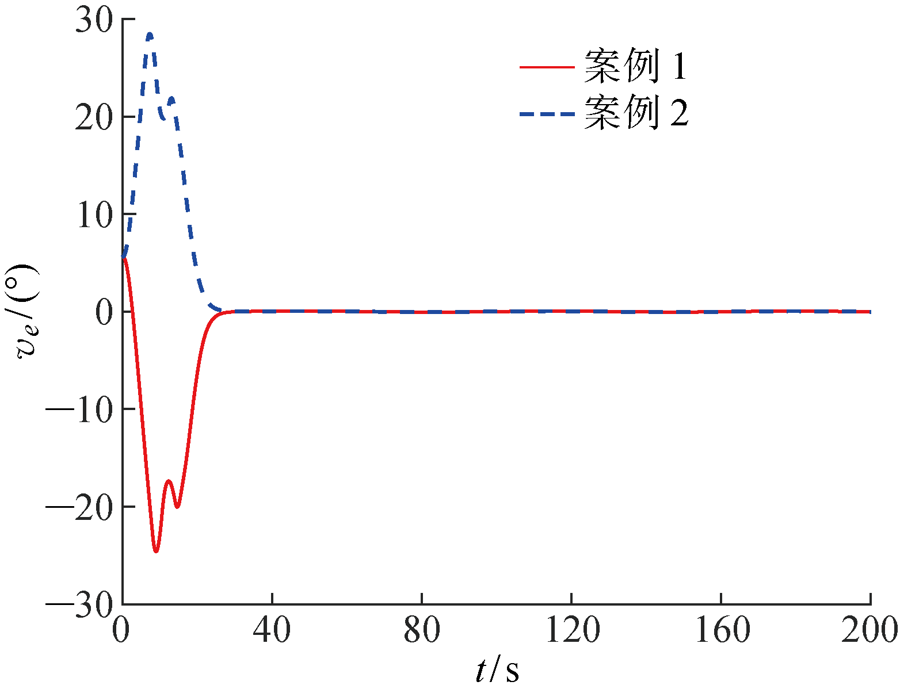

Fig.6
Control command and actual rudder of AUV in Case 1


Fig.7
Control command and actual rudder of AUV in Case 2
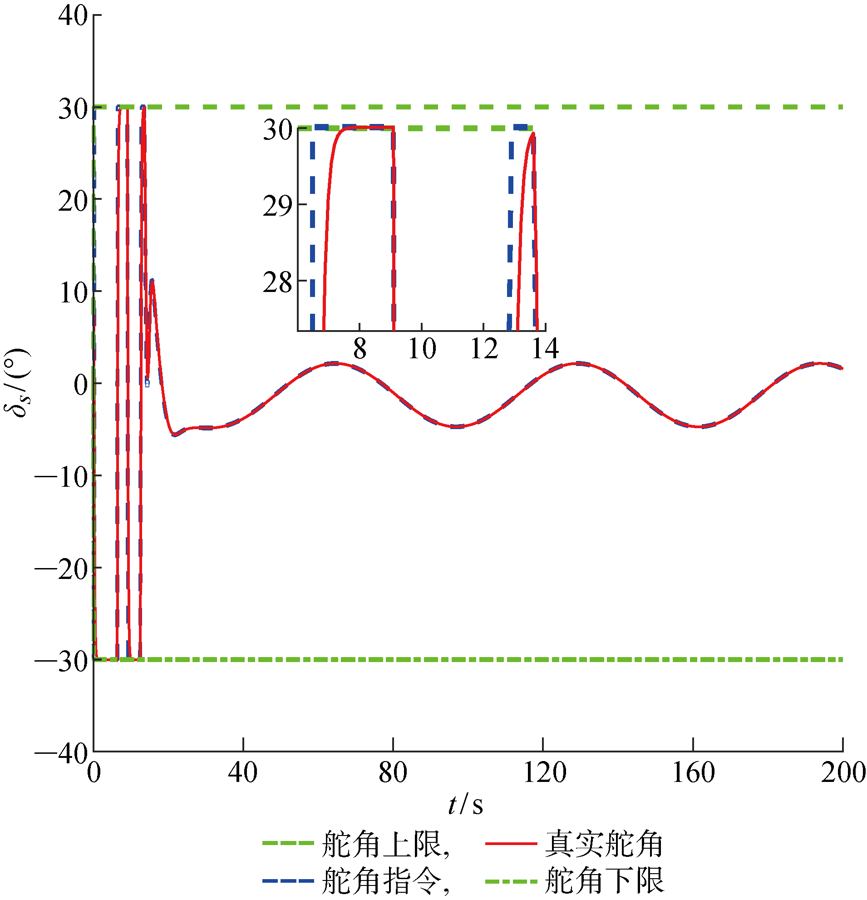
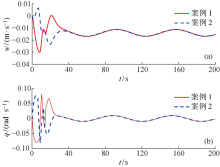
Fig.8
Velocity curves of AUV

Tab.2
Control performance indices
| 初始状态 | txs/s | tzs/s | MAEx/m | MAEz/m | MIA/(°) | MTV/(°) |
|---|---|---|---|---|---|---|
| (-10 m, 12 m, 0°)T | 15.1 | 22.1 | 0.1912 | 0.1912 | 0.0790 | 0.0031 |
| (-10 m, 12 m, 0°)T | 16.1 | 22.0 | 0.1943 | 0.1945 | 0.0762 | 0.0030 |
| [21] | YU Caoyang. On fuzzy-approximator-compensator-based saturated tracking control of autonomous underwater vehicles with configuration switching[D]. Wuhan: Huazhong University of Science and Technology, 2018. |
| [22] |
LI X, LUO X, WANG J, et al. Finite-time consensus of nonlinear multi-agent system with prescribed performance[J]. Nonlinear Dynamic, 2018, 91(4): 2397-2409.
doi: 10.1007/s11071-017-4020-1 URL |
| [1] | 于曹阳, 向先波, 张嘉磊, 等. 基于反步法的欠驱动水下机器人鲁棒定深控制[J]. 华中科技大学学报(自然科学版), 2017, 45(10): 117-121. |
| YU Caoyang, XIANG Xianbo, ZHANG Jialei, et al. Robust depth control of under-actuated underwater vehicles based on backstepping[J], Journal of Huazhong University of Science and Technology (Natural Science Edition), 2017, 45(10): 117-121. | |
| [2] |
DO K D, PAN J. Robust path-following of underactuated ships: Theory and experiments on a model ship[J]. Ocean Engineering, 2006, 33(10): 1354-1372.
doi: 10.1016/j.oceaneng.2005.07.011 URL |
| [3] |
WANG N, SUN Z, YIN J, et al. Fuzzy unknown observer-based robust adaptive path following control of underactuated surface vehicles subject to multiple unknowns[J]. Ocean Engineering, 2019, 176(3): 57-64.
doi: 10.1016/j.oceaneng.2019.02.017 URL |
| [4] | 余亚磊, 苏荣彬, 冯旭, 等. 基于速变LOS的无人船反步自适应路径跟踪控制[J]. 中国舰船研究, 2019, 14(3): 163-171. |
| YU Yalei, SU Rongbin, FENG Xu, et al. Tracking control of backstepping adaptive path of unmanned surface vessels based on surge-varying LOS[J]. Chinese Journal of Ship Research, 2019, 14(3): 163-171. | |
| [5] |
YU C, XIANG X, WILSON P A, et al. Guidance-error-based robust fuzzy adaptive control for bottom following of a flight-style AUV with saturated actuator dynamics[J]. IEEE Transactions on Cybernetic, 2020, 50(5): 1887-1899.
doi: 10.1109/TCYB.2018.2890582 URL |
| [6] |
ZHENG Z, FEROSKHAN M. Path following of a surface vessel with prescribed performance in the presence of input saturation and external disturbances[J]. IEEE/ASME Transactions on Mechatronics, 2017, 22(6): 2564-2575.
doi: 10.1109/TMECH.2017.2756110 URL |
| [7] |
WEN C, ZHOU J, LIU Z. Robust adaptive control of uncertain nonlinear systems[J]. IEEE Transactions on Automatic Control, 2002, 56(7): 1672-1678.
doi: 10.1109/TAC.2011.2122730 URL |
| [8] |
JIN X. Fault tolerant finite-time leader-follower formation control for autonomous surface vessels with LOS range and angle constraints[J]. Automatica, 2016, 68(1): 228-236.
doi: 10.1016/j.automatica.2016.01.064 URL |
| [9] |
SHOJAEI K. Neural adaptive robust control of underactuated marine surface vehicles with input saturation[J]. Applied Ocean Research, 2015, 53(10): 267-278.
doi: 10.1016/j.apor.2015.09.010 URL |
| [10] |
THIEME C A, UTNE I B. Safety performance monitoring of autonomous marine systems[J]. Reliability Engineering & System Safety, 2017, 159(3): 264-275.
doi: 10.1016/j.ress.2016.11.024 URL |
| [11] | SUH J, KIM B, YI K. Design and evaluation of a driving mode decision algorithm for automated driving vehicle on a motorway[J]. IFAC-PapersOnLine, 2016, 49(11): 115-120. |
| [12] |
HEGDE J, HENRIKSEN E H, UTNE I B, et al. Development of safety envelopes and subsea traffic rules for autonomous remotely operated vehicles[J]. Journal of Loss Prevention in the Process Industries, 2019, 60: 145-158.
doi: 10.1016/j.jlp.2019.03.006 URL |
| [13] | 徐国华, 段国强, 童剑, 等. 智能水下机器人自救模糊专家系统研究[J]. 中国造船, 2004, 45(12): 271-275. |
| XU Guohua, DUAN Guoqiang, TONG Jian, et al. Fuzzy expert system of AUV self rescue[J]. Shipbuilding of China, 2004, 45(12): 271-275. | |
| [14] | 陈柱, 徐国华, 王冠学, 等. AUV主动应急自救机制与策略[J]. 中国舰船研究, 2018, 13(6): 120-127. |
| CHEN Zhu, XU Guohua, WANG Guanxue, et al. AUV emergency self-rescue mechanism and strategy[J]. Chinese Journal of Ship Research, 2018, 13(6): 120-127. | |
| [15] |
QIN H, CHEN H, SUN Y, et al. Distributed finite-time fault-tolerant containment control for multiple ocean bottom flying node systems with error constraints[J]. Ocean Engineering, 2019, 189: 106341.
doi: 10.1016/j.oceaneng.2019.106341 URL |
| [16] |
ZHAO L, YU J, LIN C, et al. Distributed adaptive fixed-time consensus tracking for second-order multi-agent systems using modified terminal sliding mode[J]. Applied Mathematics and Computation, 2017, 312: 23-35.
doi: 10.1016/j.amc.2017.05.049 URL |
| [17] |
BECHLIOULIS C P, ROVITHAKIS G A. Robust adaptive control of feedback linearizable MIMO nonlinear systems with prescribed performance[J]. IEEE Transactions on Automatic Control, 2008, 53(9): 2090-2099.
doi: 10.1109/TAC.2008.929402 URL |
| [18] |
CHEN L, CUI R, YANG C, et al. Adaptive neural network control of underactuated surface vessels with guaranteed transient performance: Theory and experimental results[J]. IEEE Transactions on Industrial Electronics, 2020, 67(5): 4024-4035.
doi: 10.1109/TIE.2019.2914631 URL |
| [19] |
DAI S, HE S, WANG M, et al. Adaptive neural control of underactuated surface vessels with prescribed performance guarantees[J]. IEEE Transactions on Neural Networks and Learning Systems, 2018, 30(12): 3686-3698.
doi: 10.1109/TNNLS.2018.2876685 URL |
| [20] |
ZHENG Z. Moving path following control for a surface vessel with error constraint[J]. Automatica, 2020, 118: 109040.
doi: 10.1016/j.automatica.2020.109040 URL |
| [21] | 于曹阳. 基于模糊逼近补偿法的AUV位形切换饱和跟踪控制研究[D]. 武汉: 华中科技大学, 2018. |
| [1] | MU Jianbin∗ (穆建彬), YANG Haili (杨海丽), HE Defeng (何德峰). CBF-Based Distributed Model Predictive Control for Safe Formation of Autonomous Mobile Robots [J]. J Shanghai Jiaotong Univ Sci, 2024, 29(4): 678-688. |
| [2] | YU Te, LIU Jiapeng, WU Chao, ZHOU Chang, ZHOU Shengzeng, WANG Lei. USV and AUV Cooperative Control Strategy Based on Nonlinear Disturbance Observer [J]. Journal of Shanghai Jiao Tong University, 2023, 57(S1): 114-123. |
| [3] | CAO Tian, ZHANG Xianku. Nonlinear Feedback Control of MIMO Unstable System for Ship Longitudinal Motion [J]. Journal of Shanghai Jiao Tong University, 2023, 57(8): 972-980. |
| [4] | YANG Tao (杨 涛), ZHAO Jiankang∗ (赵健康). Solution to Long-Range Continuous and Precise Positioning in Deep Ocean for Autonomous Underwater Vehicles Using Acoustic Range Estimation and Inertial Sensor Measurements [J]. J Shanghai Jiaotong Univ Sci, 2022, 27(3): 281-297. |
| [5] | FANG Haolin (房浩霖), ZHANG Jiawen (张家闻), LI Jiawang∗ (李家旺). Switched Three-Dimensional Decoupling Stabilization of Underactuated Autonomous Underwater Vehicles [J]. J Shanghai Jiaotong Univ Sci, 2022, 27(3): 383-392. |
| [6] | WU Lihong, FENG Xisheng, YE Zuolin, LI Yiping. Physics-Based Simulation of AUV Forced Diving by Self-Propulsion [J]. Journal of Shanghai Jiao Tong University, 2021, 55(3): 290-296. |
| [7] | LI Yueming,WANG Xiaoping,ZHANG Junjun,CAO Jian,ZHANG Yinghao. X-Rudder Autonomous Underwater Vehicle Control Allocation Based on Improved Quadratic Programming Algorithm [J]. Journal of Shanghai Jiaotong University, 2020, 54(5): 524-531. |
| [8] | PANG Shikun,LIANG Xiaofeng,LI Yinghui,YI Hong. Collision Avoidance Strategy for Autonomous Underwater Vehicle Based on Null-Space-Based Behavioral Approach [J]. Journal of Shanghai Jiaotong University, 2020, 54(3): 295-304. |
| [9] | WANG Jian, ZHAO Hongyu, ZHONG Jihong, WANG Mengyu, CAI Zhijun. Robust Controller Design for Near Space Vehicle [J]. Air & Space Defense, 2019, 2(3): 53-58. |
| [10] | HE Changyu,SHI Guanglin,GUO Qinyang,WANG Dongmei. Adaptive Robust Control Strategy of Valve Controlled Asymmetric Cylinder Position Control System [J]. Journal of Shanghai Jiaotong University, 2019, 53(2): 209-216. |
| [11] | DU Xiaoxu,CUI Hang. Three-Dimensional Motion Simulation and Analysis for Lateral Separation of Autonomous Underwater Vehicle Load [J]. Journal of Shanghai Jiao Tong University, 2017, 51(12): 1480-1487. |
| [12] |
ZHU Xinyao1,SONG Baowei2,XU Gang1,YANG Songlin1.
Research on Landing Strategy and Influencing Factors of an Autonomous Underwater Vehicle with Supporting Mechanism [J]. Journal of Shanghai Jiao Tong University, 2017, 51(10): 1241-1251. |
| [13] | DU Xiao-xu1* (杜晓旭), LI Xin-liang1 (李新亮), HAO Cheng-zhi2 (郝承智), WANG You-jiang1 (王有江). Stability Analysis of Two-Point Mooring Autonomous Underwater Vehicle [J]. Journal of shanghai Jiaotong University (Science), 2015, 20(5): 618-624. |
| [14] | XU Zhangbao,MA Dawei,YAO Jianyong,DONG Zhenle,YANG Guichao. Indirect Adaptive Robust Control of DC Motors with Finite-Time Disturbance Observer [J]. Journal of Shanghai Jiaotong University, 2015, 49(09): 1281-1287. |
| [15] | Lv Xueqin1,ZHANG Ke2,WU Yixiong2. Seam Yracking Control Mechanism and Theoretical Analysis of Welding Mobile Robot [J]. Journal of Shanghai Jiaotong University, 2015, 49(03): 371-374. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||